
Dynamic System Modeling of a Hybrid Neural Network with Phase Space Reconstruction and a Stability Identification Strategy

Abstract
:1. Introduction
2. Analytical Process of Data Characterization
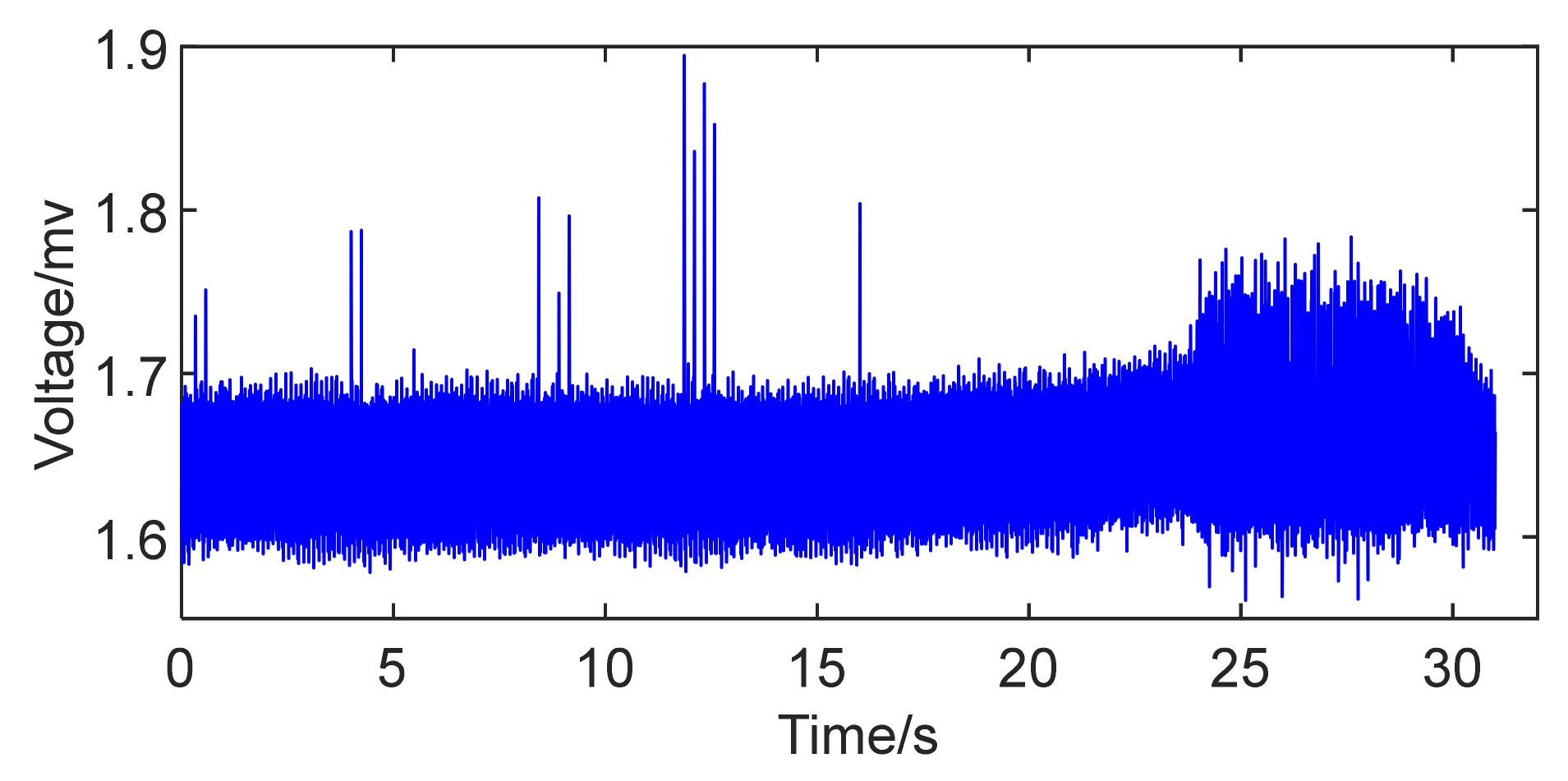
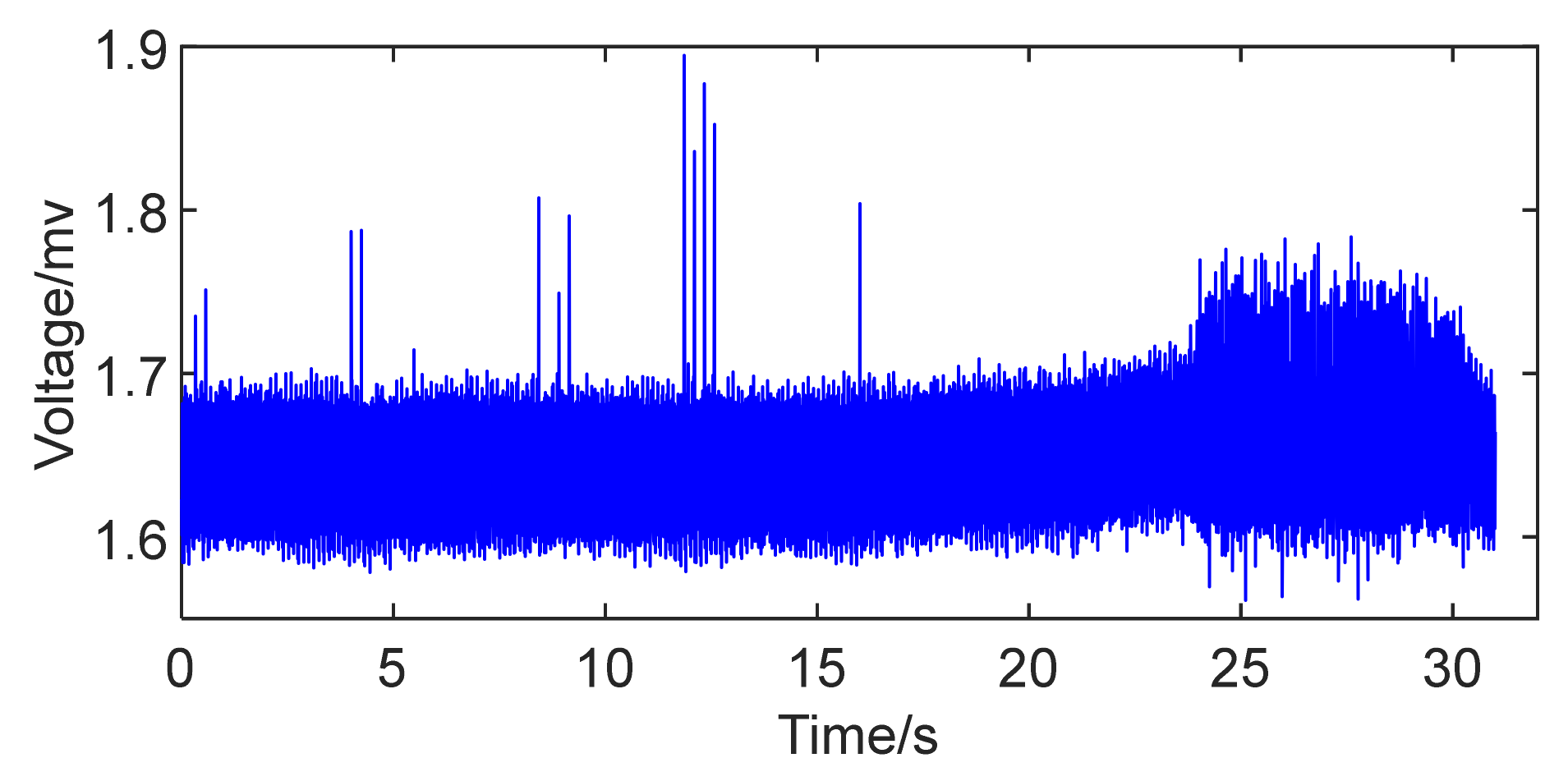
2.1. Preprocessing of Initial Dataset
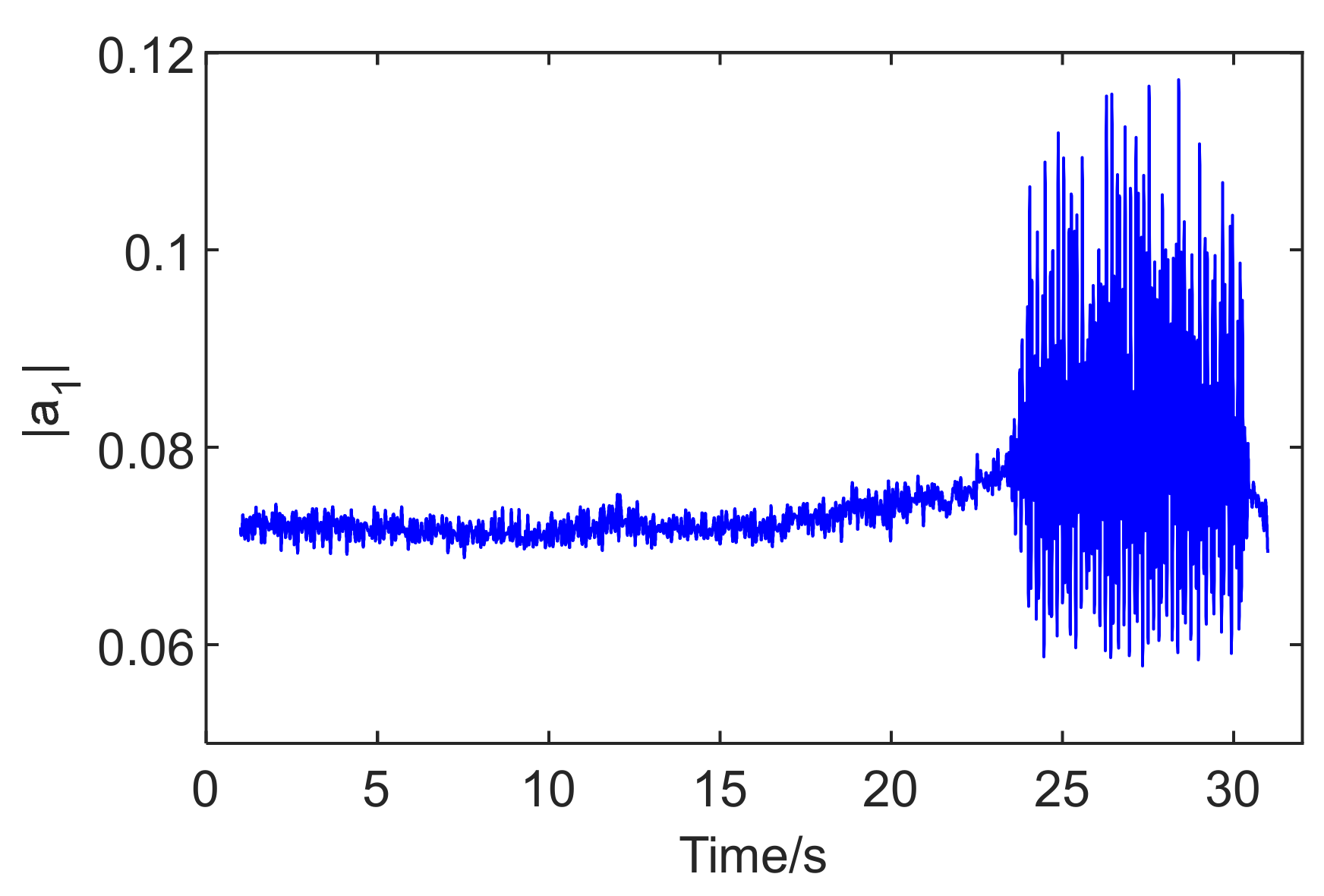
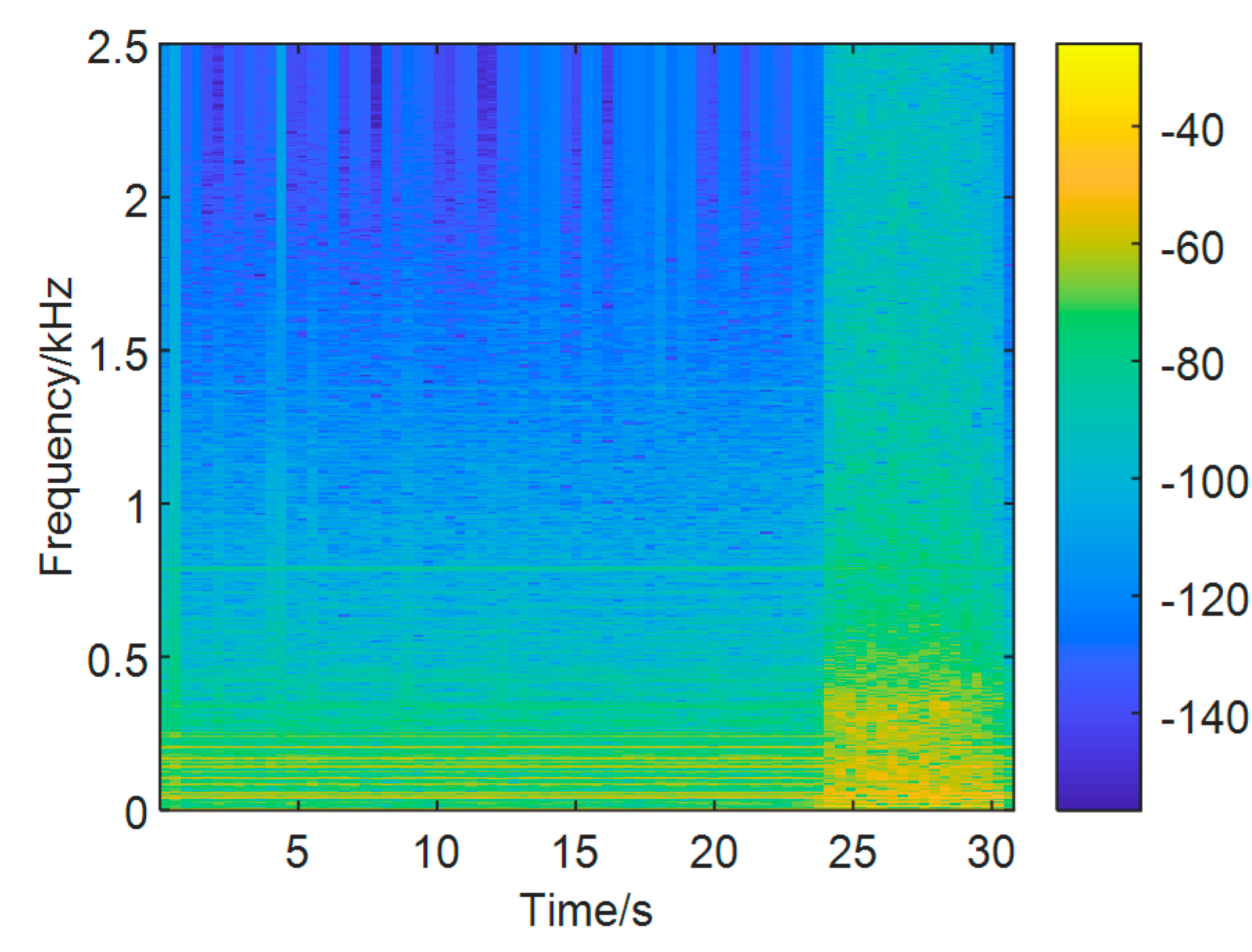
2.2. Feature Extraction of the Spatial Mode
2.3. Chaotic Characteristics of Spatial Mode with Time Series
2.3.1. Phase Space Reconstruction of Spatial Mode
2.3.2. Chaotic Determination of Spatial Mode
3. Methodology of System Modeling with Neural Network
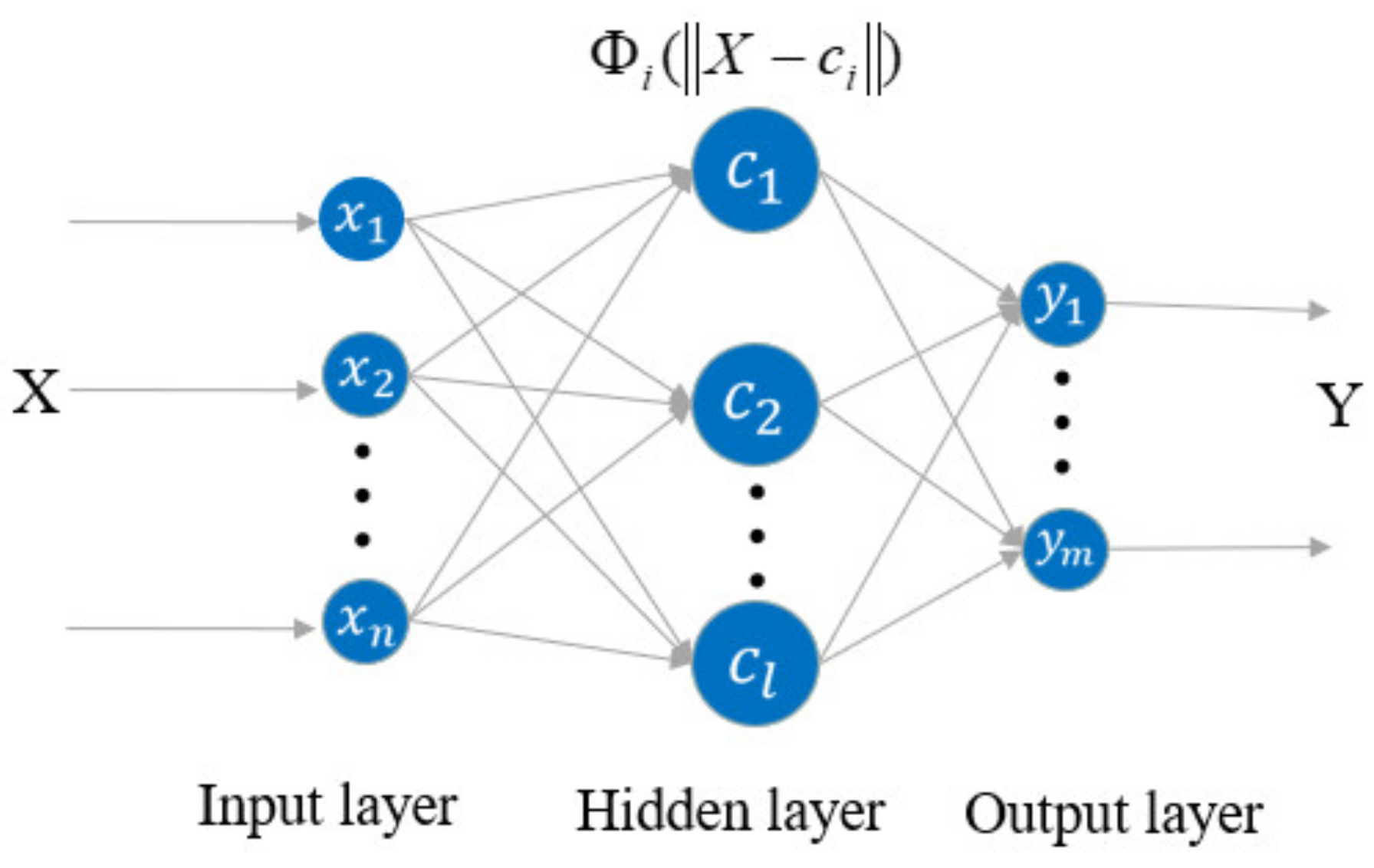
3.1. RBF Neural Network Modeling Based on K-Means Clustering Algorithm
3.2. RBF Neural Network Modeling Based on Gradient Descent Algorithm
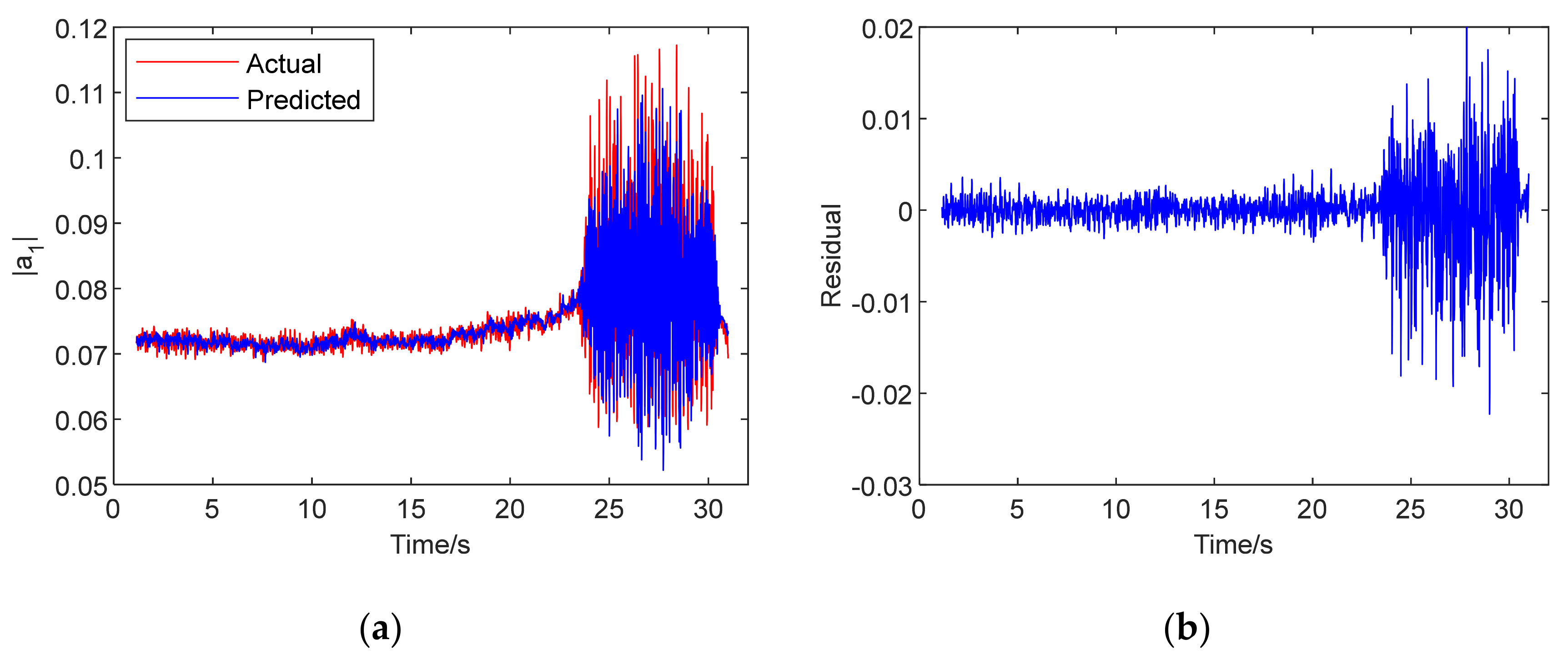
3.3. Dynamic System Modeling with the Hybrid Neural Network
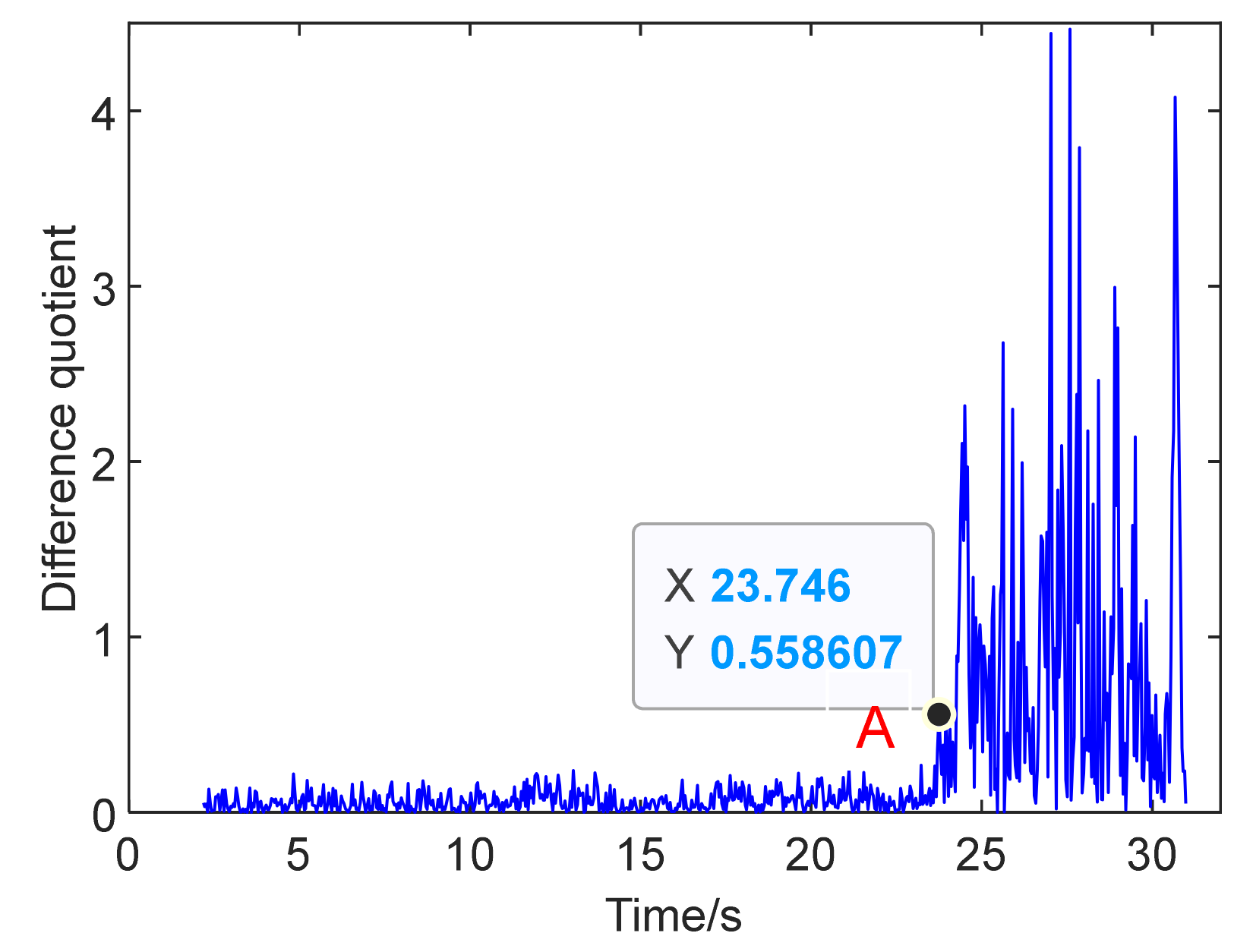
4. Instability Prediction of Dynamic System with Identification Strategy
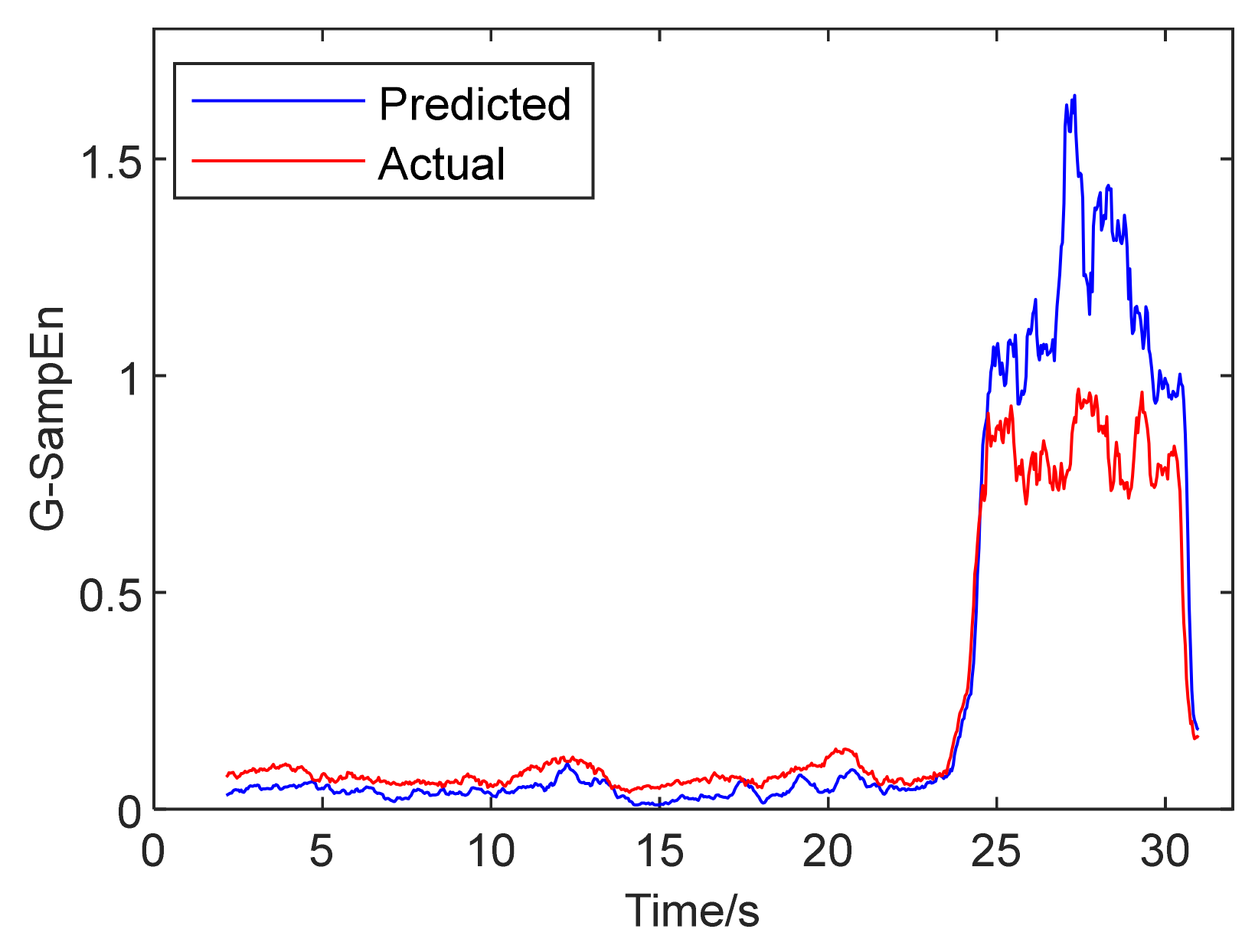
4.1. Single-Step Prediction Model Based on Sample Entropy Recognition Strategy
4.2. Multi-Step Prediction Model Based on Sample Entropy Recognition Strategy
5. Discussion on Application
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| RBF | Radial Basis Functions |
| GD | Gradient Descent |
| SVRM | Support Vector Regression Machine |
| LSTM | Long Short Term Memory |
| DFT | Discrete Fourier Transform |
| AMI | Average Mutual Information function |
| FNN | False Nearest Neighbors function |
| LSM | Least Square Method |
| MAE | Mean Absolute Error |
| RMSE | Root Mean Square Error |
| G-SampEn | Global Sample Entropy algorithm |
References
- Epstein, A.H.; Williams, J.E.F.; Greitzer, E.M. Active suppression of aerodynamic instabilities in turbomachines. J. Propuls. Power 1989, 5, 204–211. [Google Scholar] [CrossRef]
- Mcdougall, N.M.; Cumpsty, N.A.; Hynes, T.P. Stall inception in axial compressors. J. Turbomach. 1990, 112, 116–125. [Google Scholar] [CrossRef]
- Day, I.J.; Breuer, T.; Escuret, J.; Cherrett, M.; Wilson, A. Stall inception and the prospects for active control in four high-speed compressors. J. Turbomach. 1999, 121, 18–27. [Google Scholar] [CrossRef]
- Paduano, J.D. Analysis of compression system dynamics. Act. Control Engine Dyn. 2002, 8, 1–36. [Google Scholar]
- Tahara, N.; Kurosaki, M.; Ohta, Y.; Ohta, E.; Nakajima, T.; Nakakita, T. Early stall warning technique for axial-flow compressors. J. Turbomach. 2007, 129, 448–456. [Google Scholar] [CrossRef]
- Liu, B.; Lei, Y. Design and implementation of aerodynamic instability embedded early warning system for compressor. Meas. Control Technol. 2010, 29, 68–71. [Google Scholar]
- Cameron, J.D.; Morris, S.C. Analysis of axial compressor stall inception using unsteady casing pressure measurements. J. Turbomach. 2013, 135, 021036. [Google Scholar] [CrossRef]
- Liu, Y.; Li, J.; Du, J. Application of fast wavelet analysis on early stall warning in axial compressors. J. Therm. Sci. 2019, 28, 837–884. [Google Scholar] [CrossRef]
- Xu, X.; Wang, S.; Liu, J.; Liu, X. Intelligent prediction of fan rotation stall in power plants based on pressure sensor data measured In-Situ. Sensors 2014, 14, 8794–8809. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, C.; Wen, B.H.; Si, W.J.; Peng, T.; Yuan, C.Z.; Chen, T.R.; Lin, W.Y.; Wang, Y.; Hou, A.P. Modeling and detection of rotating stall in axial flow compressors: Part I: Investigation on high-order M-G models via deterministic learning. Acta Autom. Sin. 2014, 40, 1265–1277. [Google Scholar]
- Wang, C.; Si, W.J.; Wen, B.H.; Zhang, M.M.; Wang, Y.; Hou, A.P. Modeling and detection of rotating stall in axial flow compressors: Part II: Experimental study for a low-speed compressor in Beihang University. Control Theory Appl. 2014, 31, 1414–1422. [Google Scholar]
- Hipple, S.M.; Bonilla-Alvarado, H.; Pezzini, P.; Shadle, L.; Bryden, K.M. Using machine learning tools to predict compressor stall. J. Energy Resour. Technol. 2020, 142, 070915. [Google Scholar] [CrossRef]
- Zhang, M.M.; Hou, A.P. Investigation on stall inception of axial compressor under inlet rotating distortion. J. Mech. Eng. Sci. 2017, 231, 1859–1870. [Google Scholar] [CrossRef]
- Zhang, M.M.; Li, K.Y.; Dong, W.J. Identification on rotating stall precursor of a low-pressure compressor via periodic perturbations. Propuls. Technol. 2016, 37, 871–878. [Google Scholar]
- Takens, F. Detecting Strange Attractors in Turbulence. Dynamical Systems and Turbulence. Warwick 1980; Springer: Berlin/Heidelberg, Germany, 1981; pp. 366–381. [Google Scholar]
- Wallot, S.; Mønster, D. Calculation of average mutual information (ami) and false-nearest neighbors (fnn) for the estimation of embedding parameters of multidimensional time series in matlab. Front. Psychol. 2018, 9, 1679. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.H.; Cai, H.R.; Zou, Z.J.; Xu, W.D.; Wu, J. Chaos analysis and decoupling adaptive backstepping control of doubly fed wind power system. Acta Energ. Sol. Sin. 2019, 40, 3605–3612. [Google Scholar]
- Moradi, M.J.; Roshani, M.M.; Shabani, A. Prediction of the load-bearing behavior of SPSW with rectangular opening by RBF network. Appl. Sci. 2020, 10, 1185. [Google Scholar] [CrossRef] [Green Version]
- Cheng, J.; Qi, B.; Chen, D. Modification of an RBF ANN-based temperature compensation model of interferometric fiber optical gyroscopes. Sensors 2015, 15, 11189–11207. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Han, M. Theory and Method of Chaotic Time Series Prediction; China Water Power Press: Beijing, China, 2007. [Google Scholar]
- Wolf, A.; Swift, J.B.; Swinney, H.L. Determining Lyapunov exponents from a time series. Phys. D Nonlinear Phenom. 1985, 16, 285–317. [Google Scholar] [CrossRef] [Green Version]
- Zheng, S.F.; Chen, S.M.; Di, J.H.; Wang, B.Y. Phase difference measurement of sinusoidal signal based on multi-layer cross-correlation. J. Astronaut. Metrol. Meas. 2012, 32, 34–40. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Design speed n (rpm) | 3000 |
| Outer diameter D (mm) Tip speed (m/s) | 450 70.7 |
| Hub-tip ratio | 0.75 |
| Rotor blade number | 19 |
| Stator blade number | 13 |
| Model | MAE | RMSE | MAE-1 | MAE-2 |
|---|---|---|---|---|
| Chaos–K-means–RBF | 1.8 × 10−3 | 3.3 × 10−3 | 8.38 × 10−4 | 4.5 × 10−3 |
| Chaos–GD–RBF | 1.5 × 10−3 | 2.6 × 10−3 | 6.46 × 10−4 | 3.8 × 10−3 |
| Chaos–K-means–GD–RBF | 1.2 × 10−3 | 2.6 × 10−3 | 2.67 × 10−4 | 3.6 × 10−3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Zhang, J.; Hou, A.; Xia, A.; Tuo, W. Dynamic System Modeling of a Hybrid Neural Network with Phase Space Reconstruction and a Stability Identification Strategy. Machines 2022, 10, 122. https://doi.org/10.3390/machines10020122
Zhang M, Zhang J, Hou A, Xia A, Tuo W. Dynamic System Modeling of a Hybrid Neural Network with Phase Space Reconstruction and a Stability Identification Strategy. Machines. 2022; 10(2):122. https://doi.org/10.3390/machines10020122
Chicago/Turabian StyleZhang, Mingming, Jia Zhang, Anping Hou, Aiguo Xia, and Wei Tuo. 2022. "Dynamic System Modeling of a Hybrid Neural Network with Phase Space Reconstruction and a Stability Identification Strategy" Machines 10, no. 2: 122. https://doi.org/10.3390/machines10020122
APA StyleZhang, M., Zhang, J., Hou, A., Xia, A., & Tuo, W. (2022). Dynamic System Modeling of a Hybrid Neural Network with Phase Space Reconstruction and a Stability Identification Strategy. Machines, 10(2), 122. https://doi.org/10.3390/machines10020122