1. Introduction
Scholars have conducted a significant amount of research on the theoretical modeling, structural design, and control system development of this fascinating mechanism [
1] since the 1960s, when the Gough–Stewart parallel mechanism was first postulated [
2]. The Stewart parallel mechanism has evolved into one of the most cutting-edge structures in the multi-dimensional vibration isolation field as a result of its distinctive kinematic properties. The Stewart Vibration Isolation System (SVIS) is now offered for a variety of uses in a number of industries, including vehicles, precision instrumentation, and aerospace [
3,
4,
5,
6].
Most recent research of SVIS is primarily oriented on active vibration isolation design and optimization that are applied for multidimensional vibration isolation applications, including the active vibration isolation unit development [
7,
8,
9], active control strategy design [
10,
11,
12]. By comparison, much less research has been performed on the overall stiffness-damping characteristics of SVIS. However, the active way makes little effect on high-frequency disturbances [
6,
13], with the limitation of actuator performance and control system delays. Therefore, in certain cases, the SVIS stiffness-damping characteristics are still required to suppress the high-frequency disturbances through the passive way. As: certain advanced spacecraft working in the space environment, the precision loads equipped are very sensitive to high-frequency disturbances [
14,
15]. These high-frequency disturbances (frequencies above 100 Hz) inevitably caused by the attitude control flywheel severely affect the performance of the spacecraft, which can hardly be addressed by active vibration isolation. This leads to the necessity of research on the passive vibration isolation characteristics of SVIS. Since the key parameters, covering the structure and stiffness-damping of strut, determine the vibration isolation performance of SVIS, reasonable parametric modeling is highly required to guide researchers completing the parameter design and optimization.
In previous studies, the Lagrangian method [
16,
17,
18] and the Newton–Euler method [
19,
20,
21] have most frequently been applied for dynamic analysis of the Stewart platform. However, the dynamic equations of SVIS systems achieved by the above methods are usually adopted in implicit form, leading to an absence of a significant functional relationship between the system mechanical properties and key parameters, hence they are not feasible for direct application to the parameter design of SVIS. To address this issue, some scholars have developed corresponding dynamic parametric models in explicit form for the analysis of the Stewart platform. Jiang has developed equations to relate the six-order natural frequencies to the parameters of the Stewart platform under undamped conditions [
22]. Behrouz established a fully parametric model around the model behavior of the Stewart platform, in which parametric formulations of eigenvectors, stiffness, damping, and Jacobian matrices are presented in terms of design variables [
23]. In addition, the overall stiffness characteristics, as the main aspect affecting the vibration isolation performance and dynamic behavior of SVIS, have been studied around relating them to the parameters. Chen completely developed the modeling of instantaneous stiffness for Stewart platforms through Jacobian-based approaches [
24]. Regarding the stiffness isotropy, Yao and Bandyopadhyay have separately established the parametric equations for the stiffness of the Stewart platform [
25,
26]. Kumar developed a stiffness model for contour generation application to identify the trajectory with maximum stiffness for complex contours [
27]. In previous research, the parametric equations were mainly constructed around a certain mechanical property, which fails to reflect the mechanism quite obviously, whereby the system parameters affect the overall stiffness-damping characteristics. Therefore, it is infeasible to directly take the overall stiffness-damping parameters as variables for a solution, which is not conducive to the integrated design of SVIS in the complex system.
The designability of SVIS makes it suitable for a variety of situations in which a high performance of vibration isolation is required. In order to achieve the best isolation performance, it is usually necessary to obtain the optimal parametric solutions of the SVIS. Many scholars have conducted in-depth research around the optimization design of SVIS parameters under different conditions. Yang and Shyam applied SVIS for the micro-vibration isolation of a spacecraft payload, and they adopted various parametric optimization methods to optimize the structural parameters of the Stewart platform, so that the SVIS has the minimum range of natural frequency distribution for the first six orders [
28,
29]; Biag optimized the structural parameters of the Stewart platform through a genetic algorithm (GA) without changing the active control parameters and analyzed the influence of structural parameters on the vibration isolation effect through numerical analysis methods [
30]; Li proposed a dual quaternion method to derive the Jacobi matrix of the Stewart platform and optimized the platform parameters to obtain the best isotropic performance, so that the motion-coupling characteristics of the platform were improved [
31]. Singh also carried out corresponding research on the structural parameters around the isotropy of the Stewart platform [
32,
33]. Although the research on SVIS parametric modeling and parametric optimization have matured, it mainly focused on rigid-body systems, in which the base platform part connected to lower platform and the payload part connected to the upper platform are regarded as rigid bodies. As for complex systems in reality, the coupling characteristics introduced by the flexibility of the base platform part or the payload part connected to SVIS may not be ignored, hence the previous parametric modeling and optimization design methods are not applicable anymore. It is necessary to propose a simple and efficient parameter-modeling method to improve the flexibility of parameter setting for SVIS integration, which can facilitate the integrated optimization design of SVIS in a complex system.
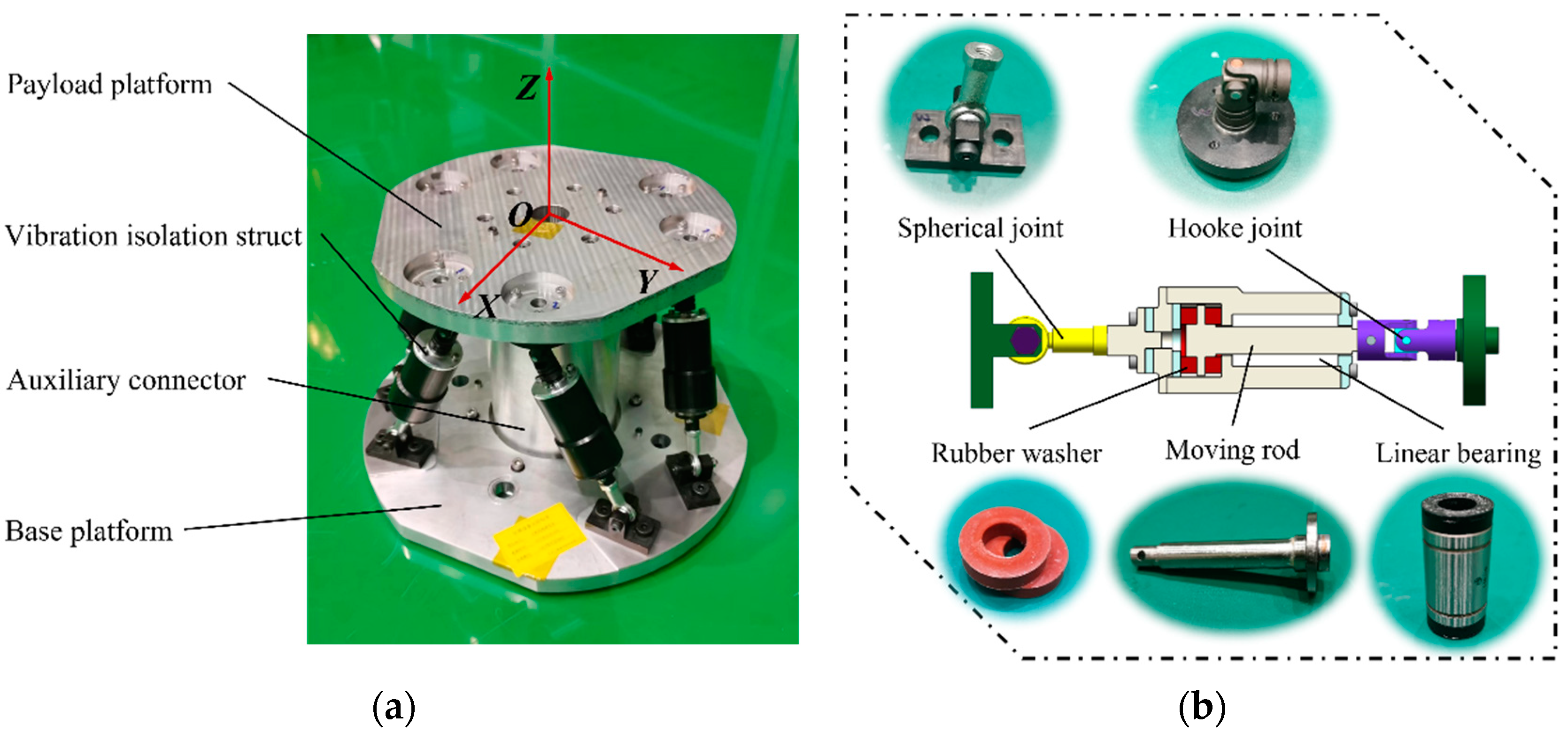
In this paper, a method to simplify SVIS modeling is proposed. Rigorous theoretical derivation proves that the SVIS can be equated to an elastic node with stiffness in six degrees of freedom (6-DOF), and the parameters of the structure as well as the stiffness-damping of the vibration isolation units can be solved inversely through the elastic node. This modeling method simplifies and directly reveals the relationship between the system parameters and the overall stiffness-damping characteristics from a new perspective. Further, the overall stiffness-damping parameters of SVIS can be integrated directly into the entire system as a few simple variables through the equivalent conversion, which provides a great convenience for the parameter design of SVIS integrated into complex systems. To validate the correctness of the equivalent modeling method, a UPS Stewart vibration isolation platform (SVIP) prototype was developed. The key dynamic characteristics of the SVIP prototype were achieved by FEM simulations and dynamics tests. Simulation results show that the error of the first six orders of natural frequencies of the SVIP do not exceed 1%, and the frequency response curves highly coincide with the theory; test results show that the resonant frequency of the SVIP is lower than the theoretical result by 1.7% in the Z direction, and certain differences between frequency response curves exist between tests and the theory in the X/Y direction, but the overall trend agrees with the theory. Despite the discrepancies that exist in the test results comparing to the theoretical and simulation results, the equivalence theory of the elastic node proposed in this paper is still considered to be reasonable. The inconsistencies of the results are concluded to be caused by the structural clearances, which can be resolved by the subsequent structural improvement of the platform prototype.
The state of the art of this paper is the innovative modeling method that equates SVIS to an elastic node, which provides an effective technical means for the integrated analysis of SVIS applied in complex systems. Related parameter modeling methods are original and have not been proposed before. The research content of this paper is divided in to four parts.
Section 2 proposes an equivalence method of the elastic node, and a theoretical justification for the method is provided.
Section 3 introduces the FEM simulations and experimental tests of the developed Stewart vibration isolation platform, and the findings are thoroughly evaluated in this section.
Section 4 concludes the work of the paper. This paper will contribute to the further development of parameter design for SVIS for analysis and strongly support the development of SVIS optimal design in a large and complex system.
2. Theoretical Analysis of SVIS
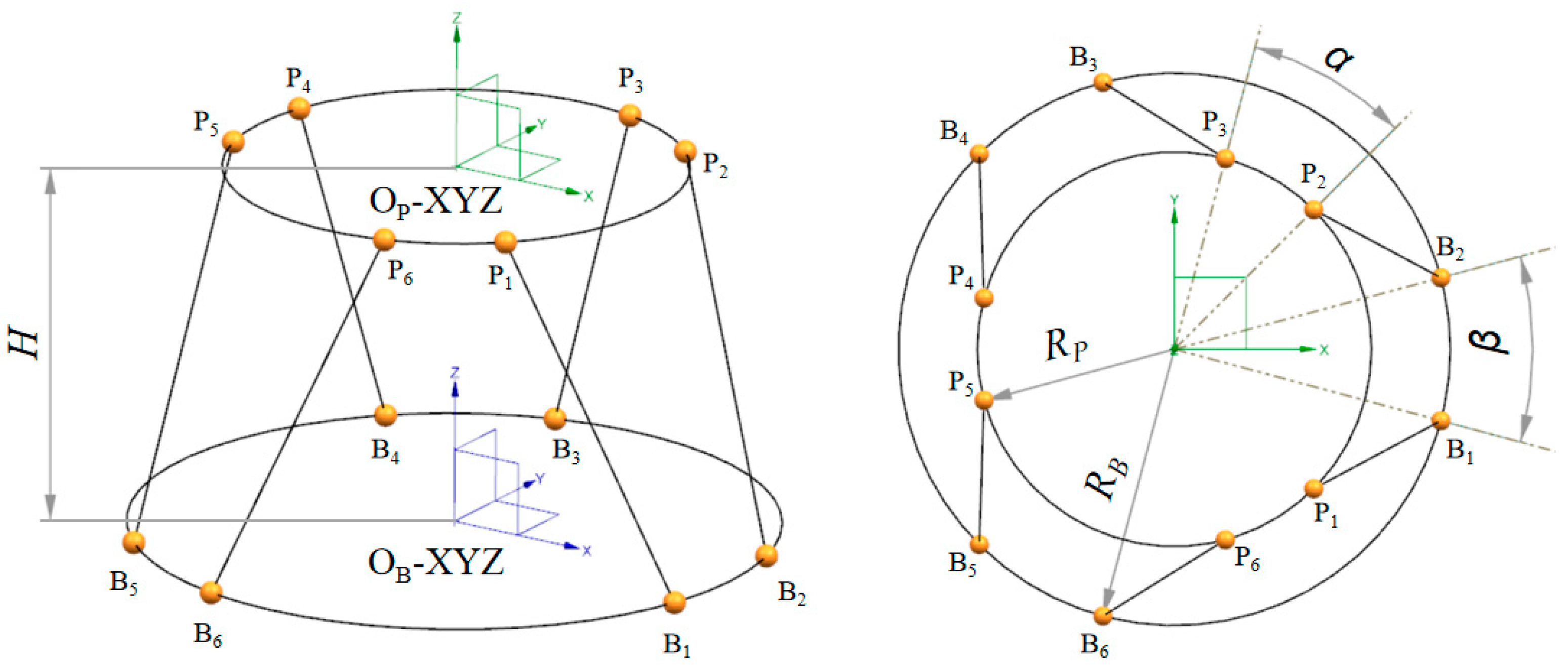
The structure diagram of the Stewart platform is shown in
Figure 1. The geometric configuration is defined by five structural parameters: the base platform’s joint-point circle’s radius
, the payload platform’s joint-point circle’s radius
, the distribution angle of the payload platform’s joint-point
and the base platform’s joint-point
, as well as the height between the payload platform’s and base platform’s joint-point circles
.
2.1. Dynamic Theory of Stewart Vibration Isolation Platform
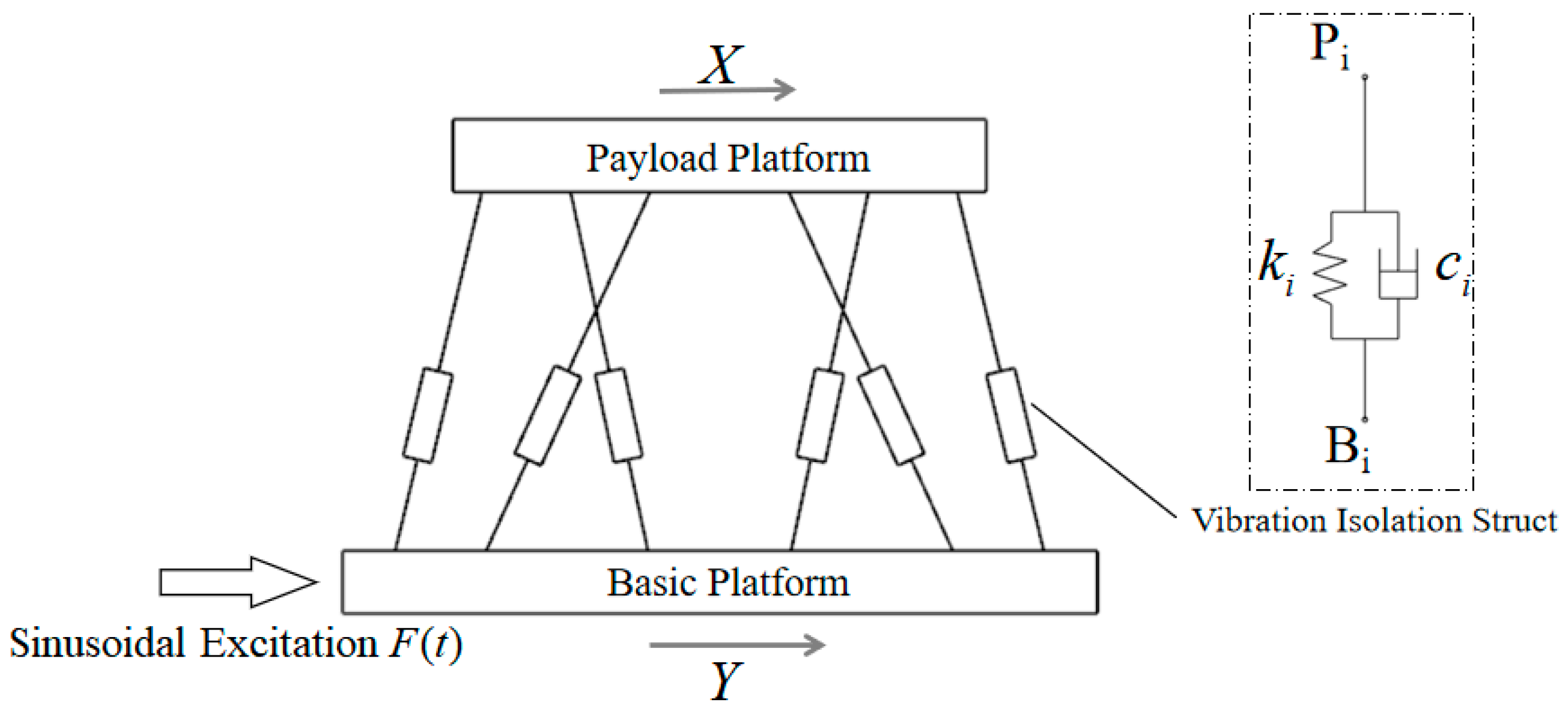
As indicated in
Figure 2, when the Stewart platform is used to isolate vibrations, the disturbances are typically input from the base platform and output from the payload platform. Here, we assume the general displacement of the payload platform is
, the general displacement of the base platform is
, and the dynamics formula of the system can be written as follows:
where:
,
indicates the platform’s general mass matrix,
indicates the platform’s general stiffness matrix, and
indicates the general damping matrix, respectively, where the struts’ stiffness and damping are taken to be linear. The following can be inferred from the derivation:
where:
,
(
) denotes the stiffness (damping) coefficient of
-th strut. The matrix
is the kinematic Jacobi matrix of the Stewart platform.
Assume that the moving coordinate system O
P-XYZ and the fixed coordinate system O
B-XYZ have the same beginning coordinate directions. The origins of O
B-XYZ and O
P-XYZ, which are fixed to the base platform and payload platform, respectively, and the joint-point circles of both the base platform and the payload platform, respectively, are where the two objects are located. The following is a description of the Jacobi matrix in this situation for the overall displacement between the payload platform and the moving struts:
where
denotes the unit direction vector of the
-th strut in the static coordinate system O
B-XYZ;
denotes the rotation transformation matrix from the coordinate system O
P-XYZ to the coordinate system O
B-XYZ;
denotes the position vector of
-th joint point on the payload platform in the coordinate system O
P-XYZ.
The establishment of the coordinate system above is often applied when focusing on the kinematics of the Stewart platform itself. However, the design of vibration isolation system’s places mainly concentrates on the dynamics of the isolated object and pays little attention to the payload platform itself during the actual engineering. In order to facilitate the vibration isolation design around the isolated object, as well as to expressly conduct the subsequent theoretical analysis, we extend the position of the moving coordinate system OP-OXYZ along the Z-axis.
Based on Equation (1), we transfer the O
P-XYZ coordinate system a set distance along the
Z-axis, resulting in the joint-point circle center of the payload platform having the
Z-axis coordinate of
in O
P-XYZ. The Stewart platform’s Jacobi matrix can be rewritten as follows by the derivation:
Here, we reexamine the general stiffness matrix
and the general damping matrix
. It is assumed that the stiffness and damping of the isolation struts are linear, and the stiffness and damping of all struts are the same (i.e.,
,
). In this case, the stiffness matrix
and the damping matrix
have the same form as
. Now, we define the dynamic characteristic matrix
and the matrix
is expressed as the following form:
The global stiffness and damping properties of SVIS are clearly reflected in the matrix , and future study will be focused on this matrix in the section that follows.
2.2. Dynamic Characteristic Matrix
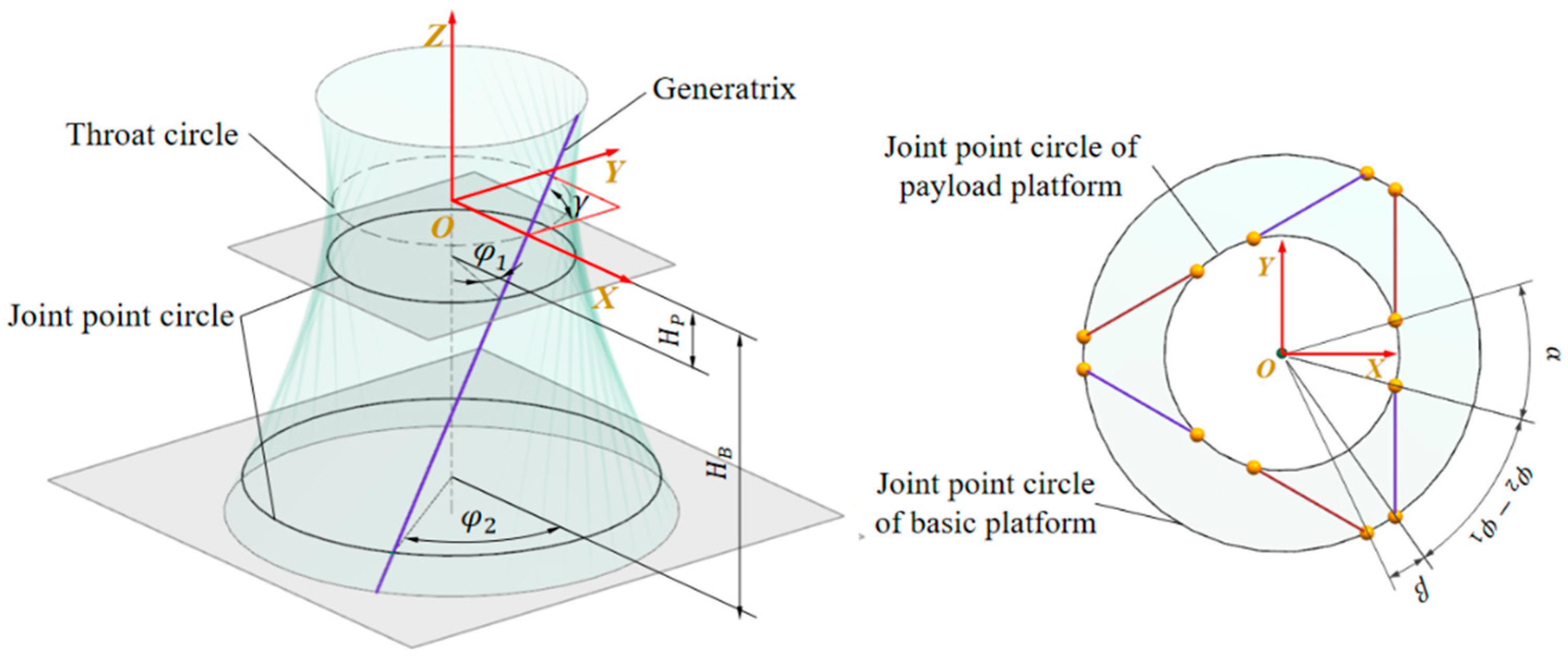
Jiang [
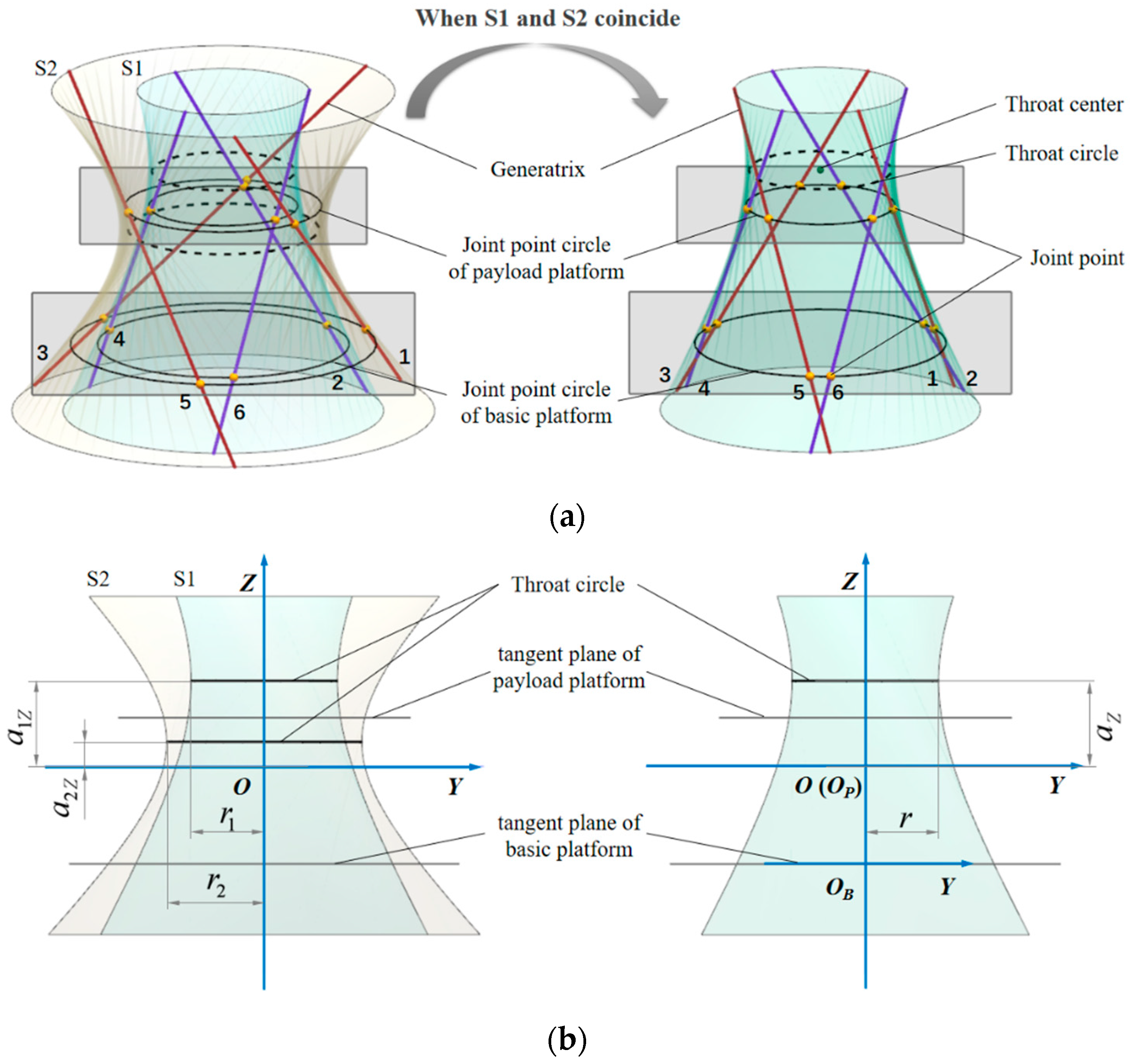
34] adopted a modeling method whereby the structural parameters of generalized Gough–Stewart configuration are presented lying on a circular hyperboloid of one sheet. There are a pair of hyperboloids of one sheet S1 and S2 shown in
Figure 3, whose surface equations are described as:
In the Stewart parallel mechanism, the two circular hyperboloids’ surfaces can be thought of as having six evenly spaced struts, and the straight lines where the struts are located can be thought of as the hyperboloids’ generatrices. According to
Figure 3, the odd-numbered struts (1, 3, 5) and the even-numbered struts (2, 4, 6) are distributed on the hyperboloids S1 and S2, respectively. The hyperboloids can be combined with two horizontal parallel planes to form a pair of circles. The placements of the joint points are determined by the junction points of the straight line corresponding to the struts and the pairs of circles, which are the joint-point circles of the payload platform and base platform, respectively. According to the Plücker coordinates of the six generatrices, the Jacobi matrix of the Stewart parallel mechanism can be directly expressed as [
34]:
where the functions of
and
are derived as:
where:
Here, and are the coefficients that determine S1 and S2, which also denote the throat’s radius of the hyperboloid S1 and S2; and are the coefficients that determine S1 and S2; and are the Z-axis coordinates of the center of S1 (S2); and , respectively, represent the unit vectors for the struts 1 and 2; denotes the angle between the generator and the x-axis.
The Stewart parallel mechanism, which is the classical configuration that is predominantly investigated in this study, depicts the situation in which both hyperboloids S1 and S2 coincide. The following are due to the coincidence of S1 and S2: , , , .
Once the fixed coordinate systems O
B-XYZ are established, the coordinate system O-XYZ can now be thought of as the moving coordinate system O
P-XYZ, as shown in
Figure 3b. Both coordinate systems correspond to the coordinate systems mentioned above. In the figure,
and
denote the Z-coordinates of the throat center in the coordinate system O
P-XYZ and O
B-XYZ, respectively. In this case, there is
. Based on this, substituting Equation (7) into Equation (5) produces:
where:
.
Here, the vector can represent the unit direction vector of any strut.
This section details the derivation of the dynamic characteristic matrix . Through the above elaboration, the design of stiffness for the SVIS can be translated into the design of the matrix .
2.3. Equivalent Stiffness Analysis of the SVIS
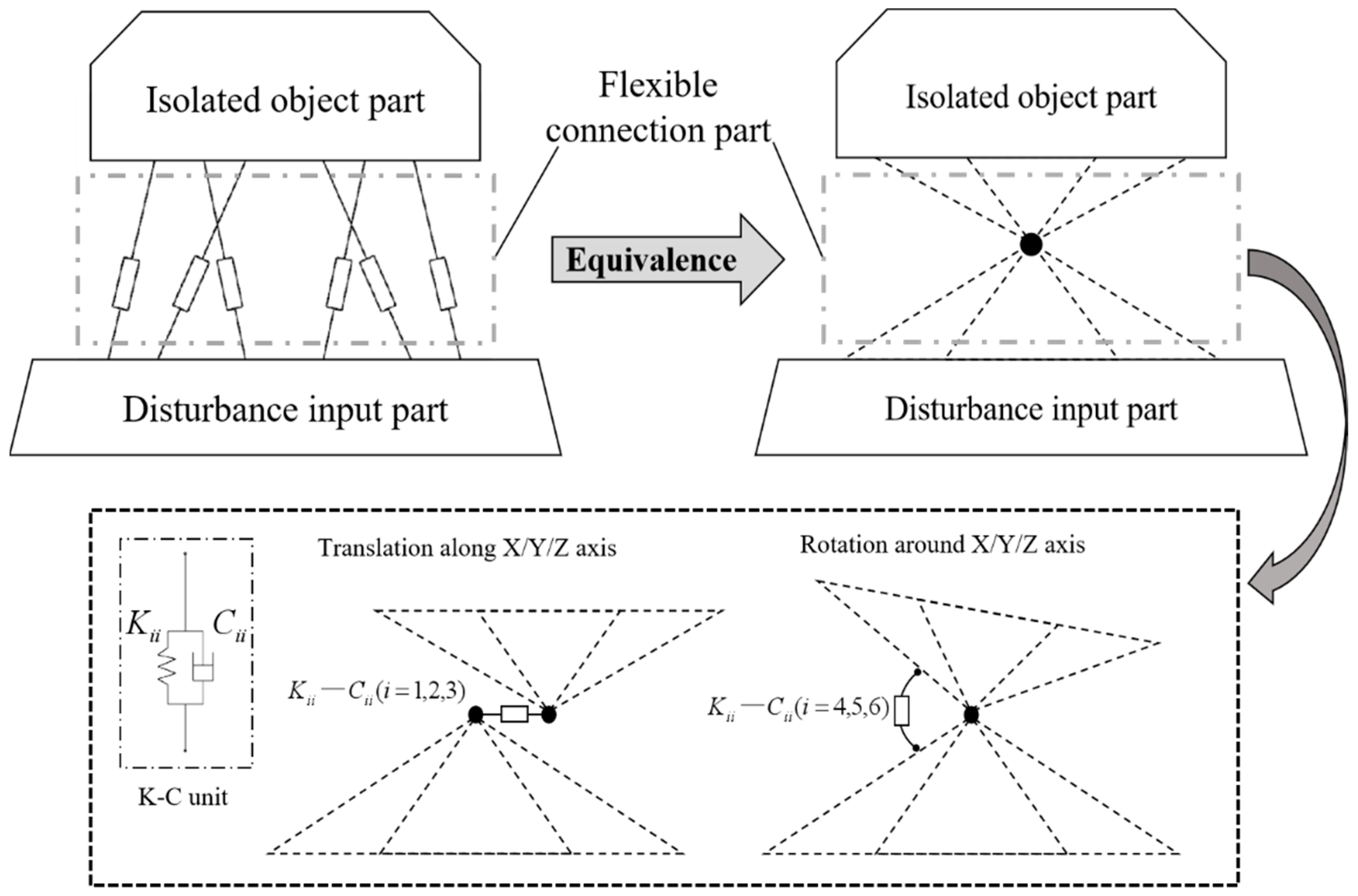
In the scenario of vibration isolation design, the whole system can be considered as consisting of three parts: an isolated object part, a disturbance input part, and a flexible connection part, as shown in
Figure 4. The payload platform and base platform are shown here as the isolated object part and disturbance input part, respectively, and the flexible connection part is represented by the six vibration isolation struts that link the two platforms together.
As mentioned in
Section 2.1, the coordinate systems O
P-XYZ and O
B-XYZ are separately fixed to the parts of the payload and the base platform. The stiffness matrix of the flexible connection part is
, which reflects the stiffness characteristics between the O
P-XYZ and O
B-XYZ in six degrees of freedom.
It can be found from Equation (5) and Equation (8) that when
(i.e., the origin of the coordinate system O
P-XYZ coincides with the throat center of the hyperboloid of one sheet), there is:
. In this situation,
becomes a diagonal matrix, so the stiffness matrix
can be rewritten as the
that decouples completely in 6-DOF. Further, the coordinate systems O
P-XYZ and O
B-XYZ (or the payload and base platform part) can be treated as if they were connected by six parallel springs of six directions, which are concentrated in one point, as shown in
Figure 4.
In summary, the position of the elastic node is the throat center of the hyperboloid corresponding to the SVIS, and its connection stiffness in six directions is ; can be determined by the Equation (8). Similarly, the damping of the SVIS can be processed as well.
The SVIS can be compared to an elastic node with 6-DOF stiffness-damping properties through the aforementioned elaboration, and the stiffness in each direction is equal to the appropriate diagonal element in the stiffness matrix . The dampening of the SVIS can also be treated in a similar manner. Furthermore, it is noteworthy that there are a few key characteristics of the elastic node’s stiffness that serve as guidelines for vibration isolation design. Here, we provide more justifications. The following conclusions are drawn from the study of Equation (8):
,
is a diagonal matrix. It indicates that the stiffness of the elastic node is independent in 6-DOF.
, . This indicates that the stiffness of the elastic node is symmetric about the X and Y axes.
, and the three element values are only determined by and . This indicates that the sum of the translational stiffness along the X/Y/Z-axis is a fixed value, which depends only on the angle between the generatrix of the hyperboloid and the XOY plane.
, and the three element values are not only determined by and , but also by . It is indicated that the sum of the rotational stiffness around the X/Y/Z-axis is a fixed value, which not only depends on , but is also proportional to the square of the radius of the throat circle .
By this point, the descriptions for the equivalent transformation of the SVIS are accomplished in this section.
2.4. Stiffness Decomposition
This section of the paper will specify the process of reverse conversion from the stiffness center to the SVIS. Assuming that there is such a system containing the isolated object A and the disturbance input part B, which has multi-dimensional vibration isolation requirements, as a result, the SVIS is prepared to be applied for this situation.
Prior to that, the parameters of the stiffness matrix and the position need to be determined according to the performance indicators of the isolated object. This process can be accomplished by appropriate methods of iterative optimization or numerical calculations. The parameter inverse solution can be carried out after determining the elastic nodes’ parameters. Firstly, the general stiffness matrix is divided by the stiffness coefficient , representing the stiffness value of a single strut, so that the dynamic characteristic matrix . The value of k can be determined by equation . Due to being decoupled, is a diagonal matrix, and the value of each diagonal element is . Next, the diagonal element is brought into Equation (8) to solve the parameters of the corresponding hyperboloid, by which we sequentially obtain the radius of hyperboloid throat circle and the unit vectors’ parameters of generatrix and . Then, the angle between the generatrix and the horizontal plane can also be determined by the equation . The hyperboloid corresponding to the SVIS can also be fully identified by combining the condition that the location of the elastic node is the location of the throat-circle center of the hyperboloid. Afterward, a pair of suitable planes parallel to the XOY plane are chosen to intersect the hyperboloid in accordance with the actual structure and other design boundary requirements, and the two resulting cross-section circles are the upper and lower joint-point circles corresponding to the SVIS. Then, the locations of the corresponding struts are determined by choosing three pairs of generatrices that are symmetrically distributed around the hyperboloid’s central axis. The intersection points of the generatrices and the cross-section circles serve as the joint points for the payload platform and the base platform.
Finally, the design parameters of the hyperboloid are further derived according to the geometric relationship, so that the corresponding structural parameters of the SVIS can be determined. The following is a list of parametric solution formulas that the author has offered; they are not all exclusive:
where:
Here,
denotes the angle between the generatrix and the plane XOY;
and
denote the angle between the intersection point’s horizontal position vectors and the plane XOZ;
and
respectively, represent the height position of the tangent planes. The meanings of the parameters are presented in
Figure 5.
Moreover, for better application in actual engineering, the following additional notes are essential for the parameter design of SVIS:
Theoretically, can be selected arbitrarily from the range (0°,60°), and when is determined, the other value can also be determined.
The distribution angle of the struts around the Z-axis has no effect on the stiffness characteristics of the SVIS.
After the position of the stiffness center is determined, the position parameters of the tangent plane corresponding to the joint-point circles of the payload (base) platform only determine the positions of joints, without affecting the stiffness characteristics of the SVIS.
This section has elaborated the process of parameter conversion from equivalent elastic nodes to SVIS. Further, the parameter design of SVIS can be translated into the design of the equivalent elastic node.
2.5. Discuss
In this paper, it is indicated that the SVIS can be equated to an elastic node with stiffness-damping characteristics of 6-DOF through the theoretical derivation. The equivalence method can express the stiffness characteristics of the SVIS in a relatively clear and concise way while retaining the original stiffness characteristics. Theoretically, under the satisfaction of specific constraints, the elastic node’s parameter selection range encompasses all feasible SVIS parameters, making it possible to apply parameter optimization to identify the best solution among all conceivable values. In addition, the existing formulas for parameter conversion eliminate the need for complex function calculations during the conversion between the elastic node and SVIS, making the design of the SVIS in practical engineering much more effective.
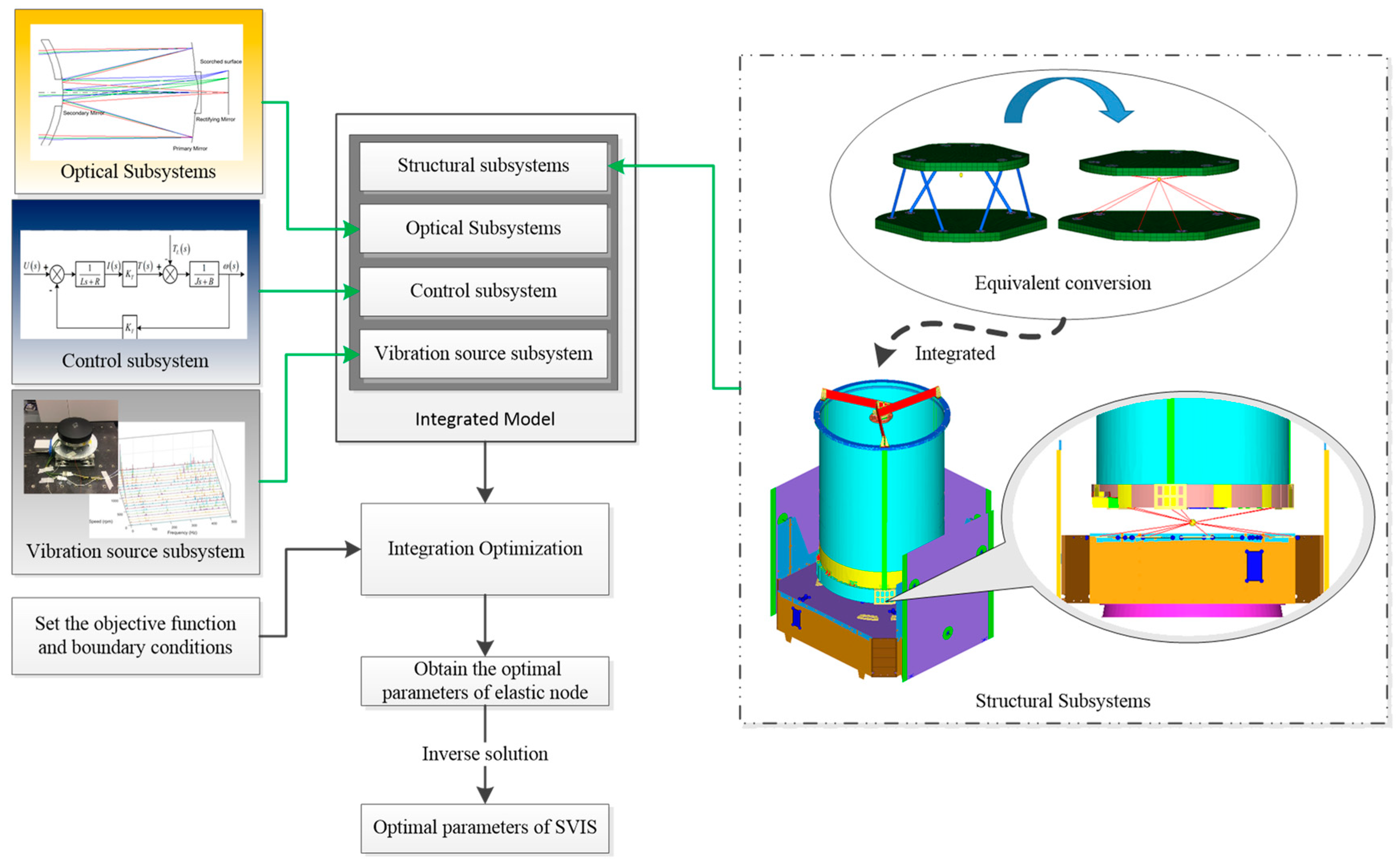
It is worth mentioning that the proposed equivalent modeling method cannot only be adopted for general numerical methods for the parameter design of SVIS under rigid body conditions, but the equated elastic node model can be fully integrated with the FEM method compared with the previous SVIS parameter model, which allows for better parameter design of SVIS in complex flexible systems. In order to better represent the value of the proposed equivalent modeling method in engineering applications, its usage is extended and explained in this section. Taking the vibration isolation design of a remote-sensing satellite as an example, the integrated optimization design of the SVIS’s equivalent parameter model under the satellite system is introduced by the following contents.
It is frequently necessary to build an integrated model that incorporates numerous subsystems when examining complicated systems. Among them, the dynamic subsystem usually adopts the FEM method as the analysis vehicle. In the previous approach, the SVIS integrated into the FEM models requires a predetermination of the overall structural parameters, which greatly limits the flexibility of the SVIS parameter settings. As a result, although the approach is valid for the forward analysis of the vibration isolation performance under the global integrated model, it is a challenging process to achieve the parametric optimal solution of the SVIS. This is due to the fact that the FEM elements corresponding to the SVIS must be completely constructed before the SVIS can be integrated into the FEM model. During the process, when the structural parameters of the SVIS are modified, the FEM elements of the SVIS inevitably need to be recreated, which makes it a complicated process to reset the SVIS parameters. Thus, it is hard to achieve an automatic optimization of the structural parameters of the SVIS under the global integrated model. By comparison, the stiffness equivalence method proposed in this paper provides a useful strategy. According to the method in this paper, the SVIS is equivalent to a 6-DOF elastic node, as shown in
Figure 6, and fast iteration of SVIS parameters can be realized by repeatedly changing the parameters of the elastic node, which eliminates the process of repeated mesh division for the SVIS. Therefore, the parameters related to the elastic node can be adopted directly as the optimization variables for the iterative design of the SVIS, making it possible to achieve the integrated optimization design of the SVIS in complex systems.
Here, we take the vibration isolation design for the optical load of a remote-sensing satellite as an example to instruct the actual application of the theory proposed in this paper. First, according to the theory in
Section 2.3, the SVIS can be equated to an elastic node, and the relevant parameters and the stiffness characteristics of the elastic node can be referred to the
Section 2.2. The SVIS, in the form of an elastic node, is incorporated into the FEM models of the satellite. Then, the FEM model acts as a dynamic subsystem added to the integrated model, in which the parameters of the elastic node are treated as optimization variables. Next, the iterative optimization is conducted to solve the optimal parameter solution of the elastic node in accordance with the performance indices of the optical load. After that, the solution for the optical parameters of the SVIS can be accomplished according to the theory regarding the parameter inverse solution in
Section 2.4 based on the optimal parameters of the elastic node. Through the above procedures, the theoretical parameter design of the SVIS with optimal performance can finally be achieved. The primary flow refers to
Figure 7.
4. Conclusions
In this study, an innovative SVIS parameter modeling approach is proposed around the design of multi-dimensional vibration isolation in complex systems. Through the derivation and analysis of the relevant dynamics theory, the SVIS is equated to an elastic node with 6-DOF stiffness-damping characteristics, which can clearly and simply reveal the influence mechanism of parameters on the overall stiffness-damping characteristics in an explicit form. Further, the parameter transformation process of the equivalent model is provided completely. Based on the theory, the parameter characteristics and the usage boundaries of the equivalent SVIS model are systematically analyzed and discussed in this paper. Further, a theory-based parametric design process is presented to introduce the application of a proposed modeling approach with the example of remote-sensing satellite vibration isolation design.
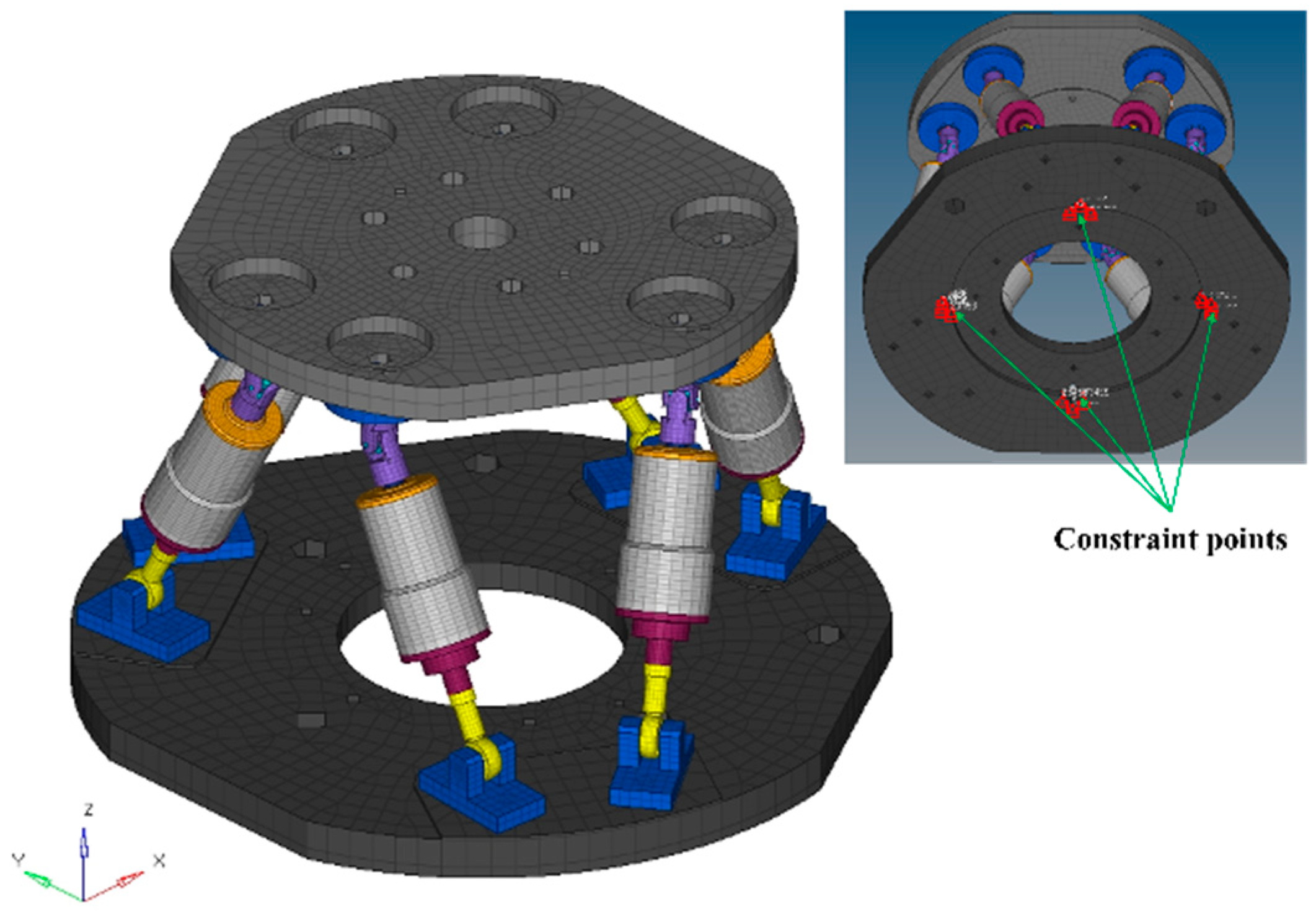
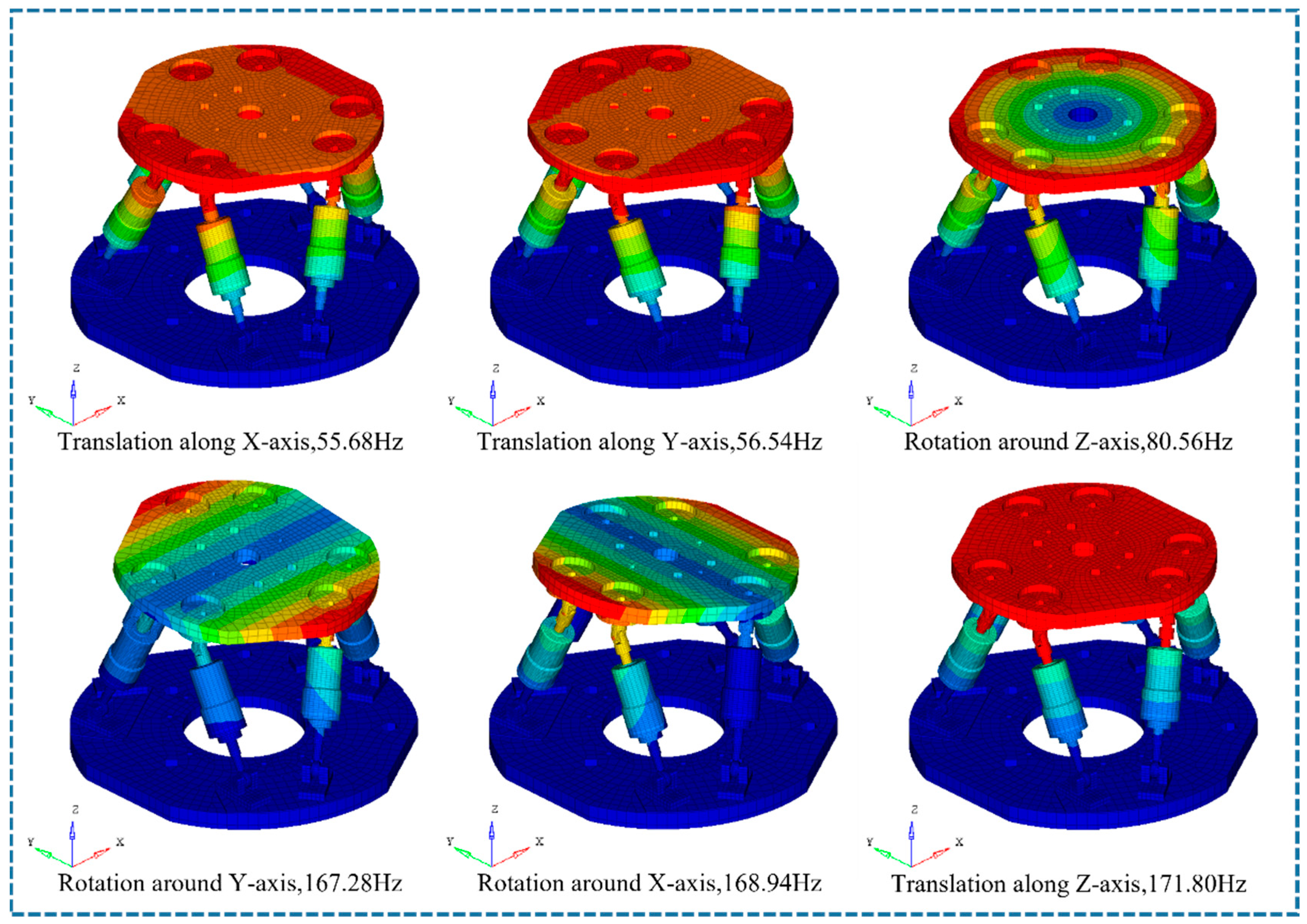
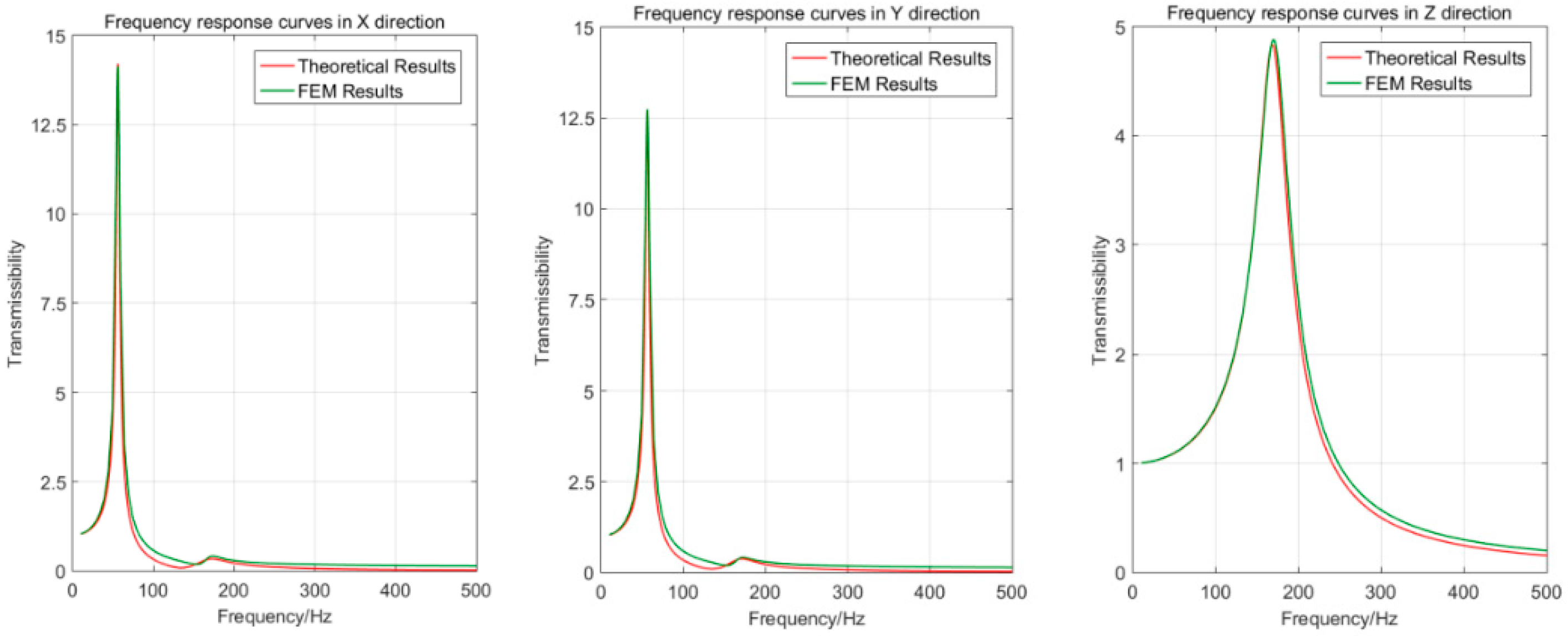
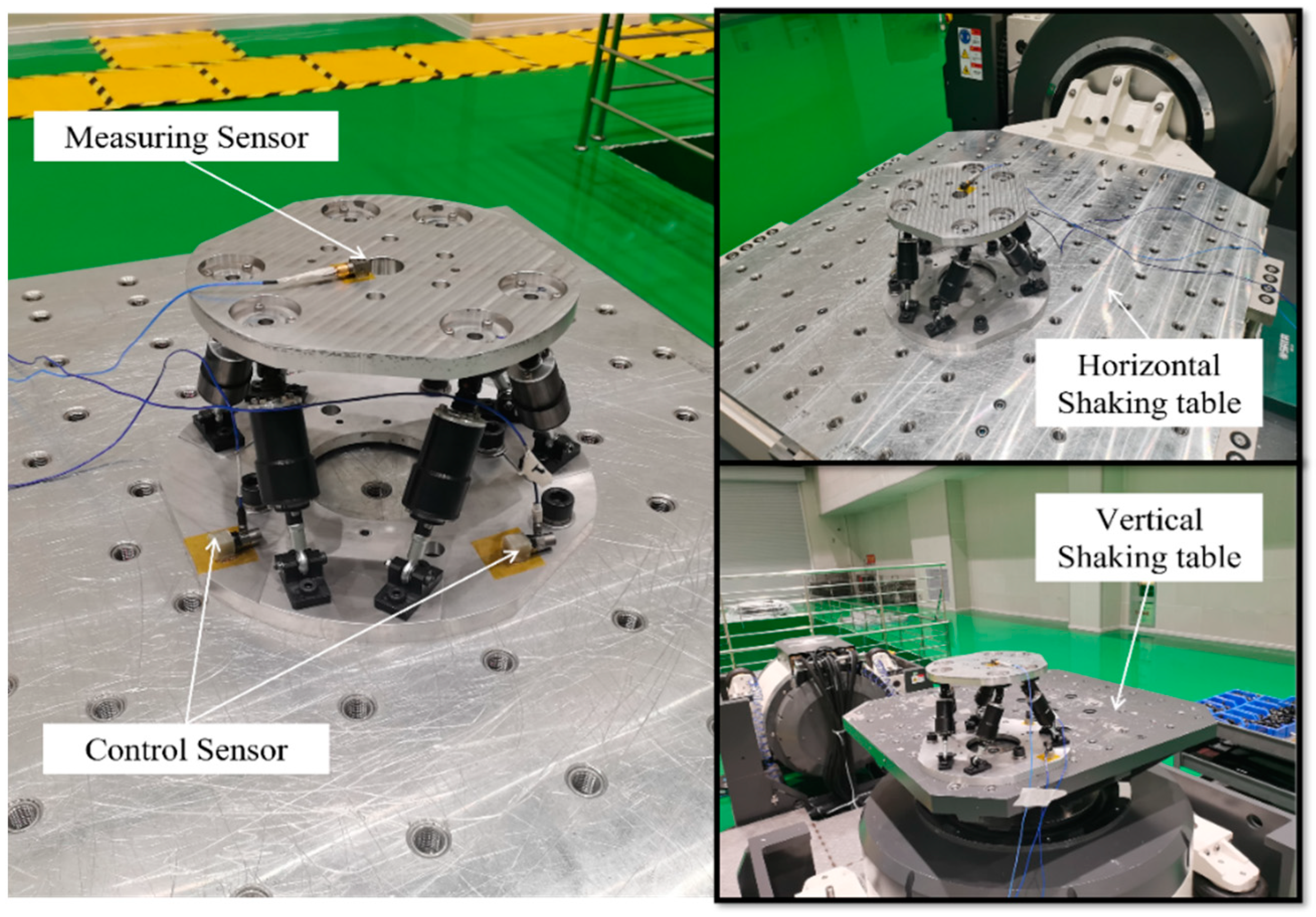
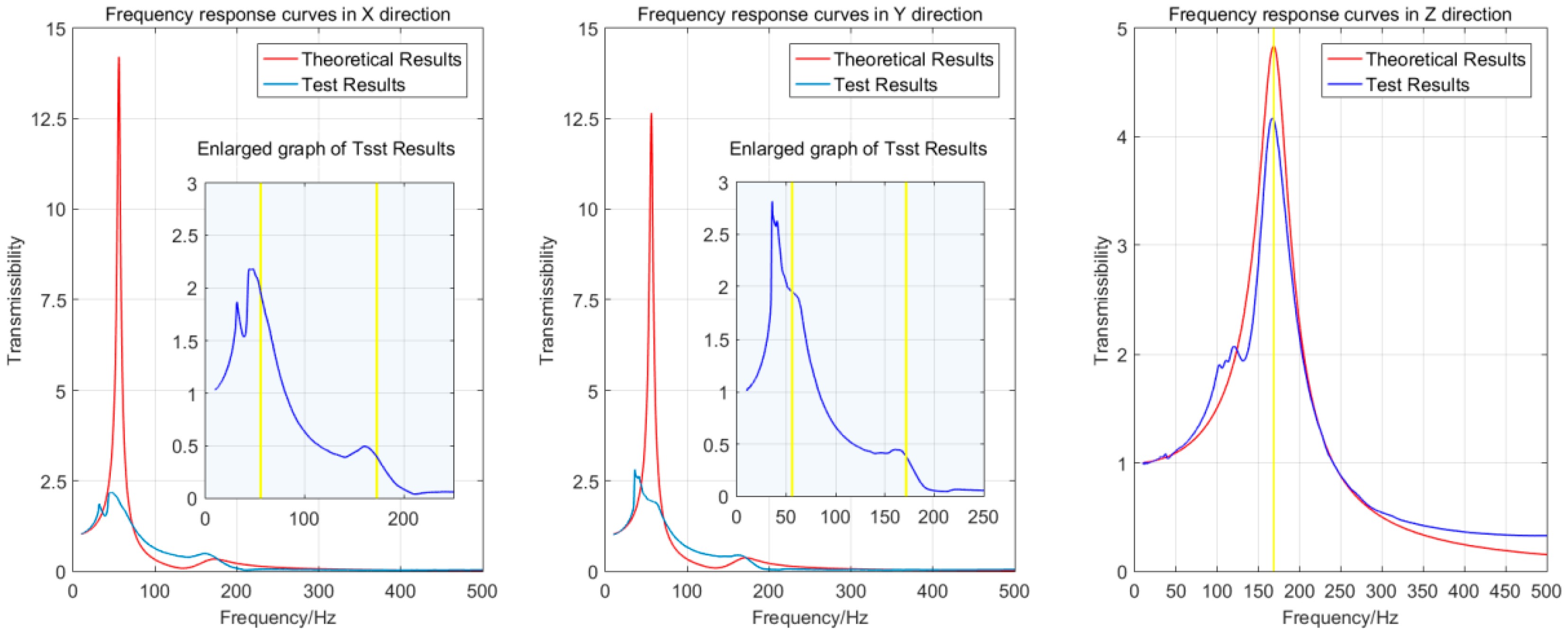
In order to verify the rationality of the equivalent stiffness modeling, the prototype of a SVIP was developed, then the rationality of the stiffness equivalence method of the SVIS was verified from the two aspects of FEM simulations and dynamics tests. The simulation results show that the natural frequencies obtained by the FEM modal analysis and the theoretical results are no more than 1%, and the corresponding modes are consistent with the theory. Further, the frequency response curves obtained from the FEM analysis highly coincide with the theoretical results. The equivalent modeling method proposed in this paper can be strongly demonstrated by the FEM simulation. Regarding the tests, the frequency response curves of the X/Y/Z directions were obtained by conducting frequency response tests on the SVIP prototype. The results show that the frequency corresponding to the resonance peak differs from the theory by 1.7% in the Z direction, and the overall trend of the curve relatively close to the theory. Due to the structural clearances of the platform prototype, the frequency response curves of the X/Y-direction have certain deviations compared with the theory, but the overall trends agree with the theoretical analysis. Despite the somewhat unsatisfactory experimental results, the theory in this paper can still be considered reasonable. It was found that structural clearances can affect the dynamic characteristics unexpectedly through the test results and the error analysis. This problem will be fixed through structural modifications in an upcoming work.
The purpose of this research is to offer a theoretical framework for the parameter design of SVIS applied in complex systems.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}