
Mixed Sensitivity Servo Control of Active Control Systems

Abstract
:1. Introduction
- (1)
- The traditional flight control system has unstable switching between force and position control. The system control mode should be switched according to the pilot’s flying habits, however, the two systems, namely the position control system and the torque control system, are coupled with each other and influence each other, resulting in unstable switching between the two systems.
- (2)
- The control system has parameter uncertainties, such as the mass of the simulated side-stick, system inertia, system damping and friction, and the uncertainty of unmodeled dynamics; the system is perturbed by external environmental parameters, such as noise and disturbance torque.
- (1)
- This paper proposes the design principle of the side-stick in an artificial feel system.
- (2)
- The servo characteristics of the system are analyzed, and the position closed-loop system and the torque closed-loop system are preliminarily designed.
- (3)
- This paper proposes a robust control method for active side-stick manipulation based on .
2. ACS Methods of Study
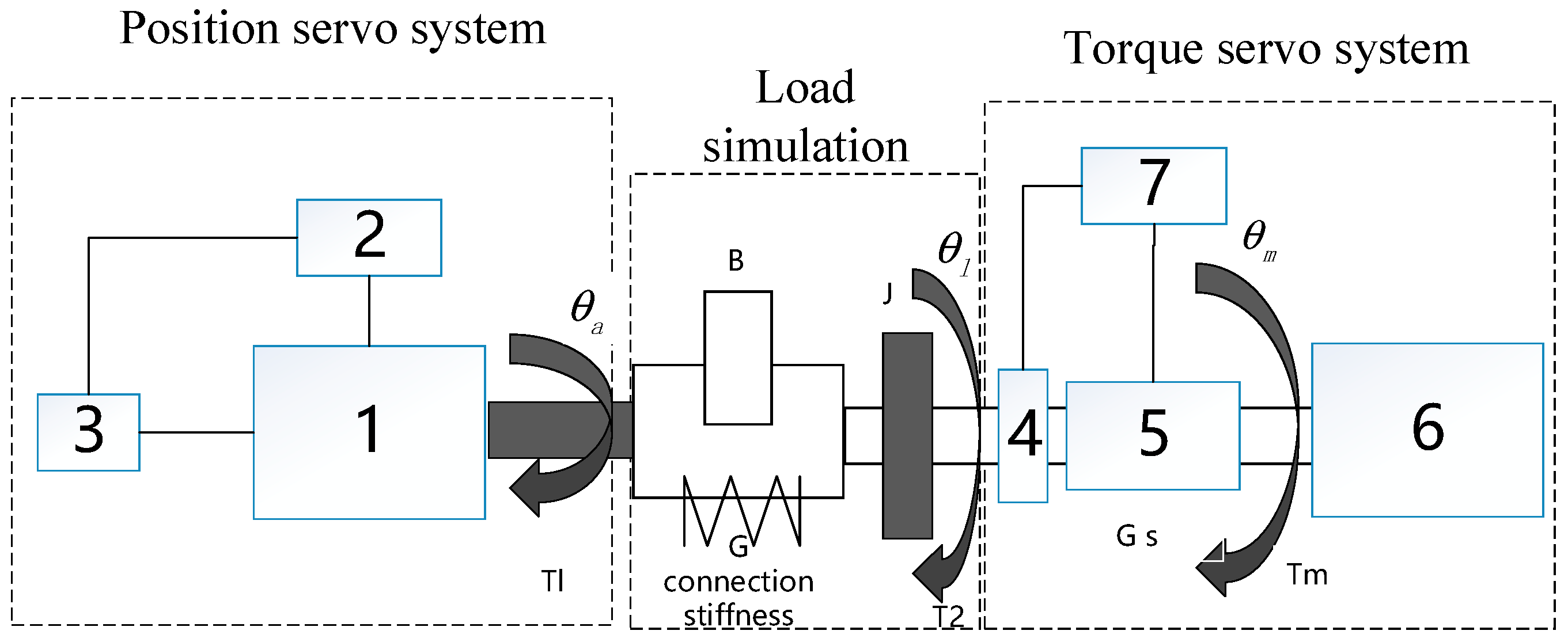
2.1. Introduction of ACS
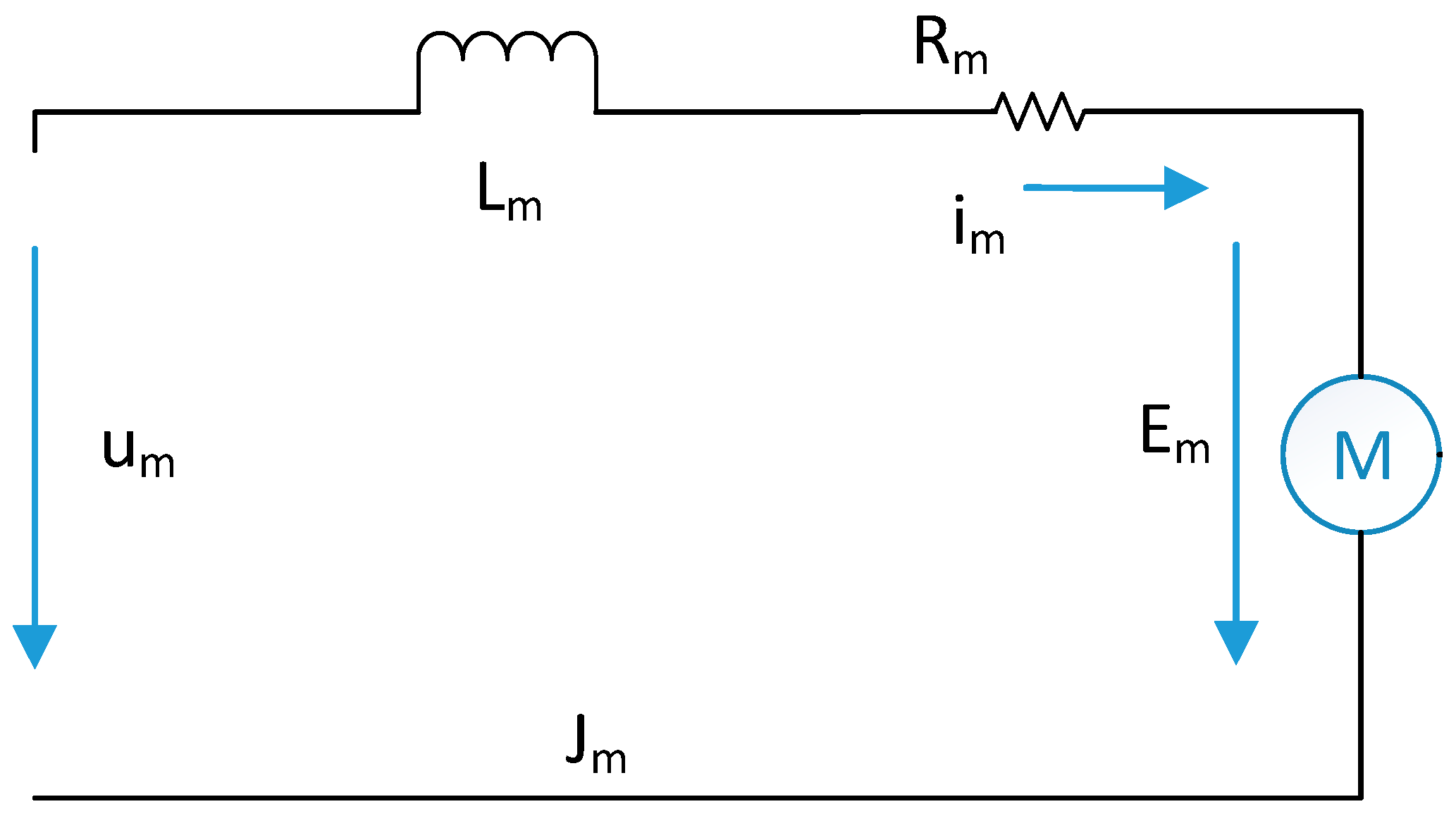
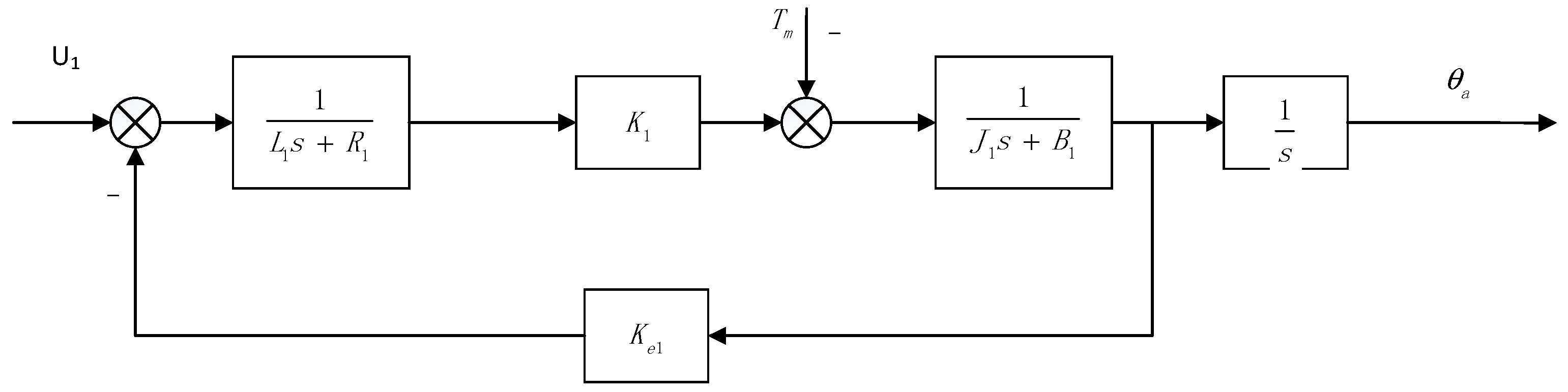
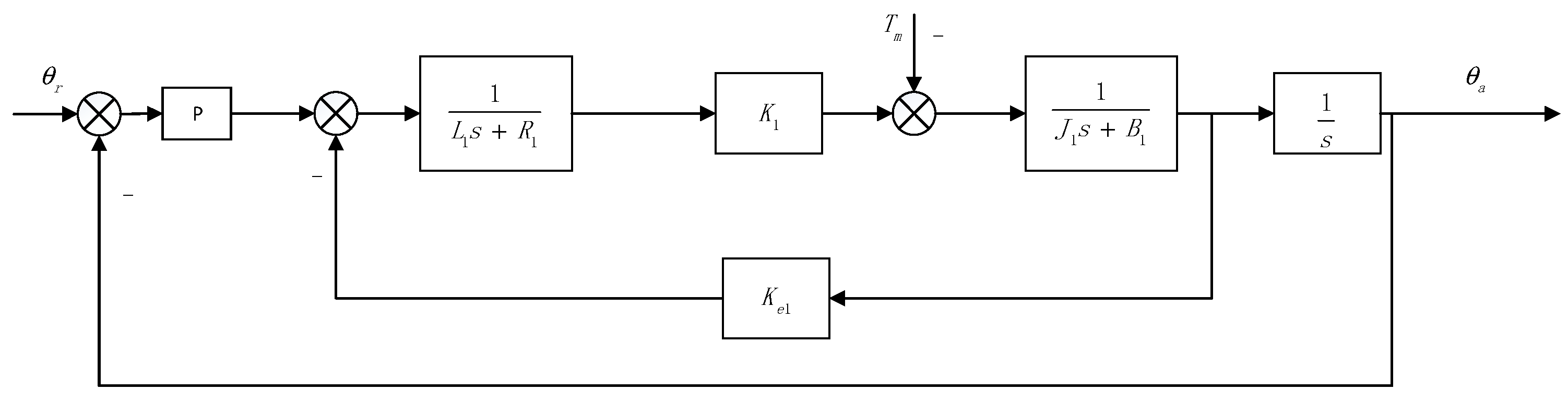
2.2. Modeling of Position Servo System
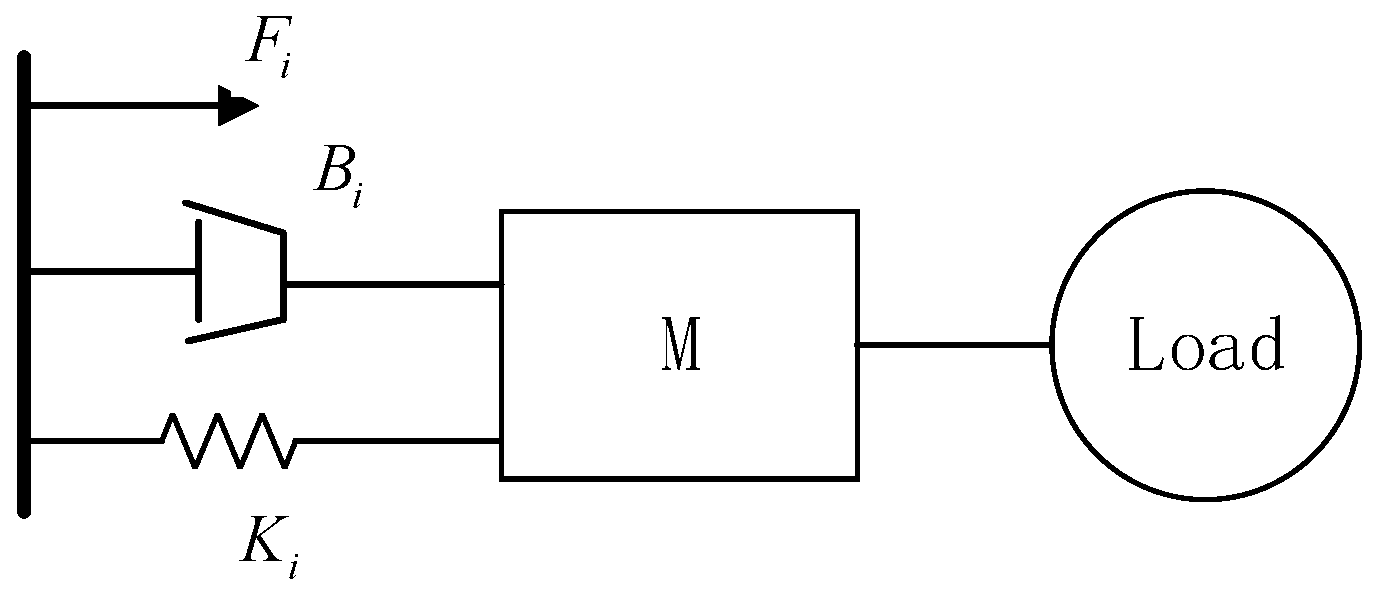
2.3. Modeling of the Artificial Feel System
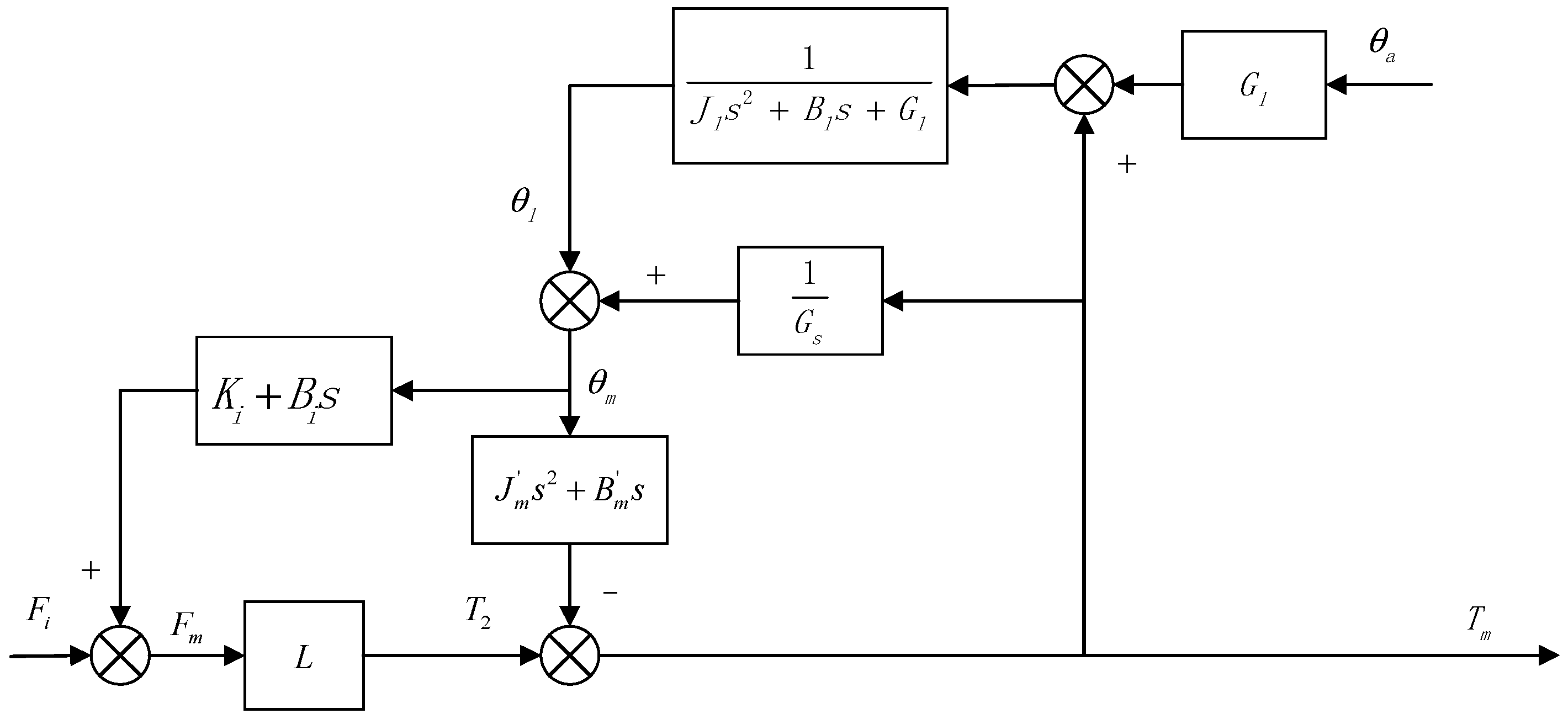
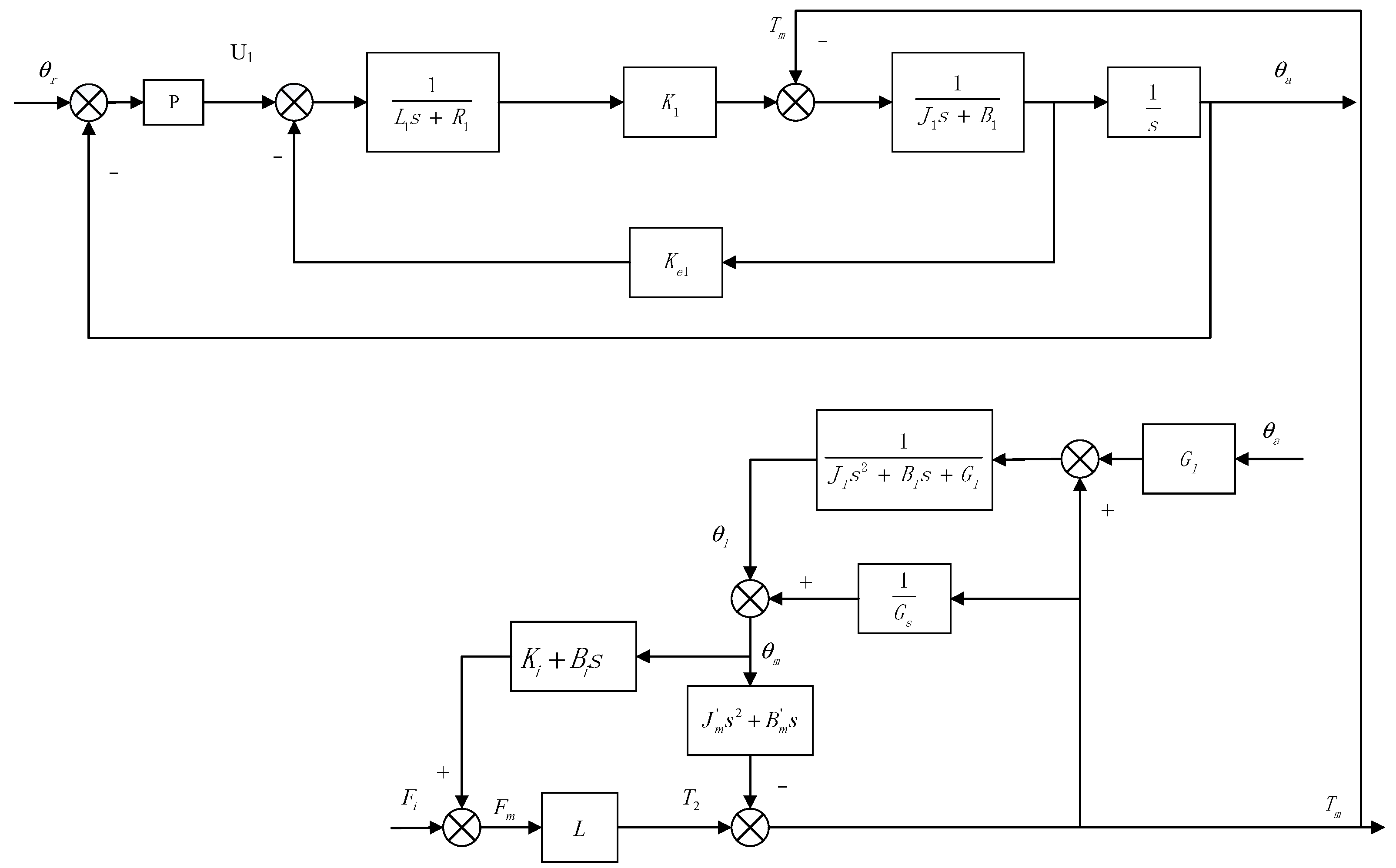
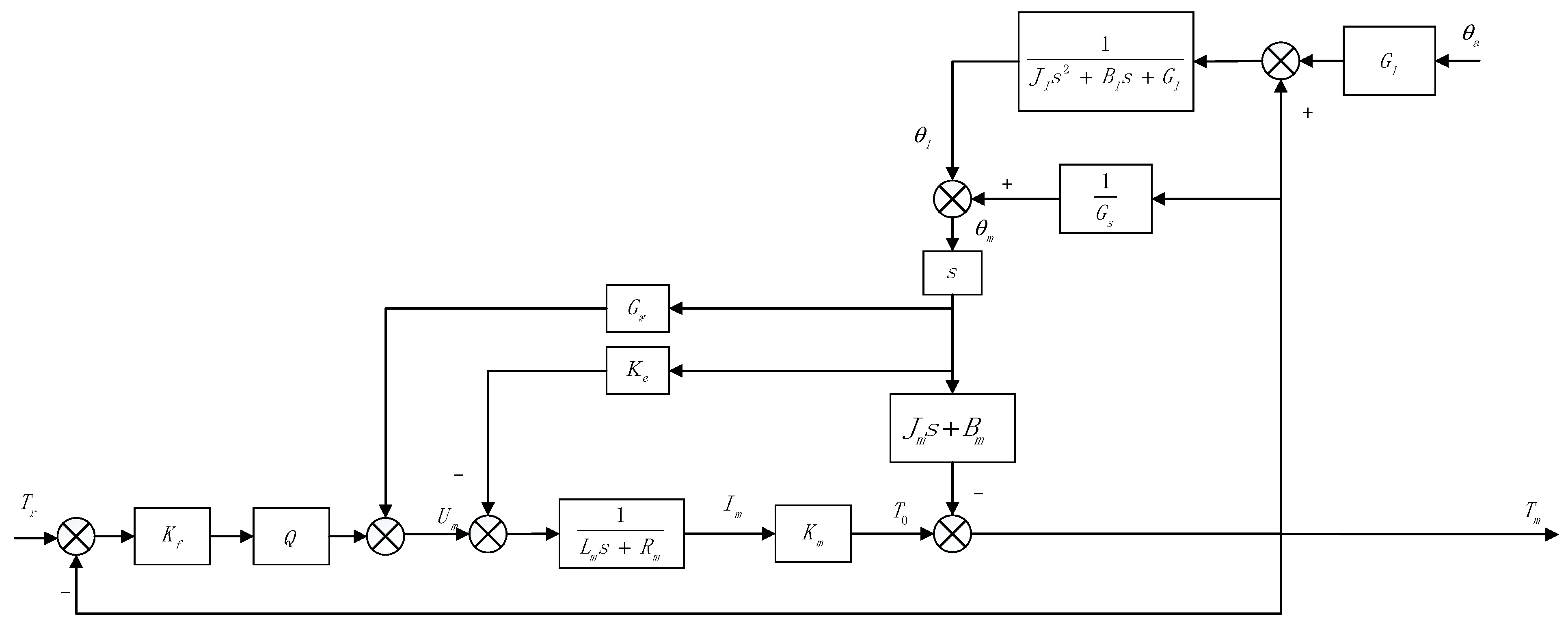
2.4. Modeling of Coupling System
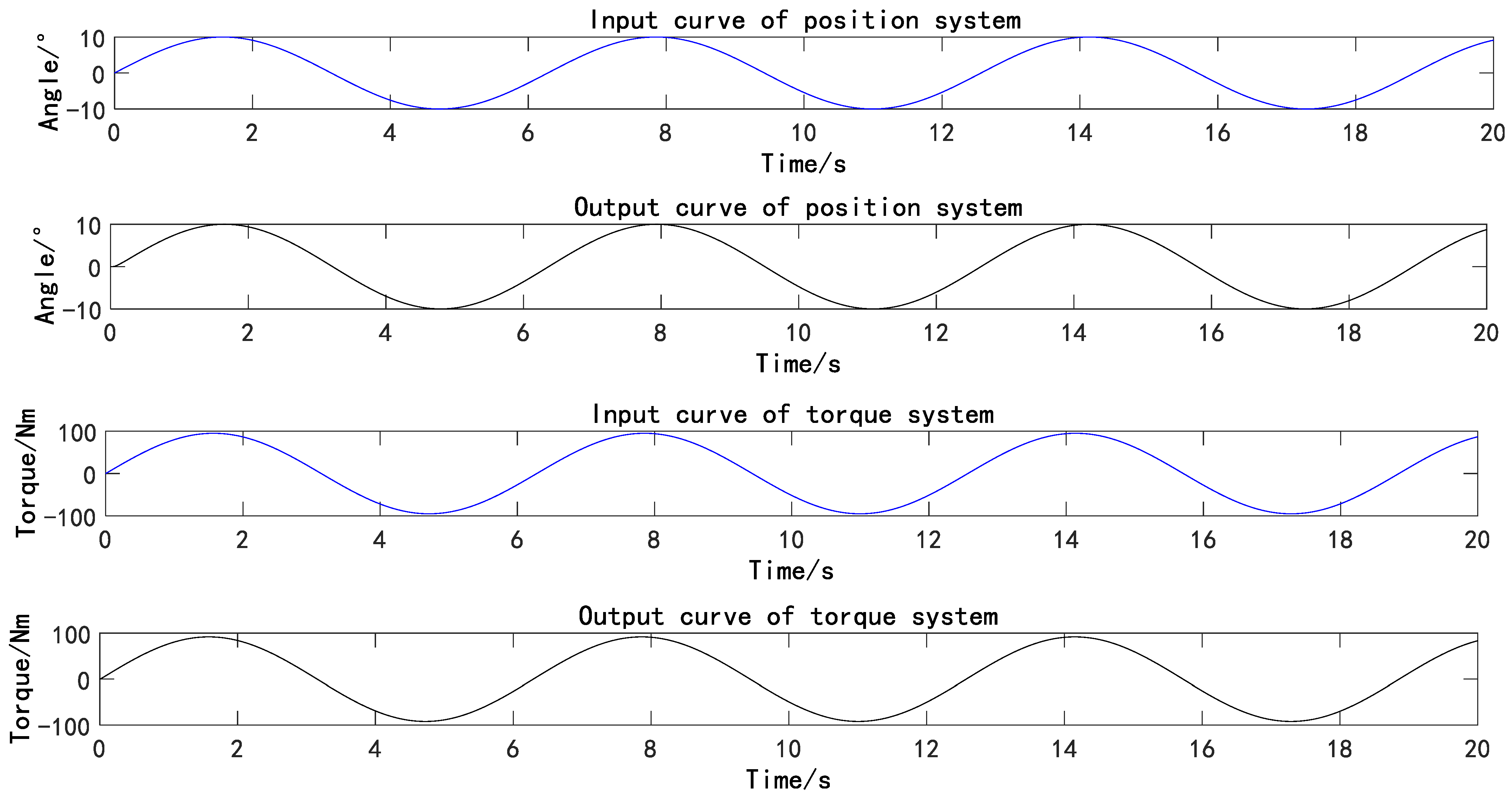
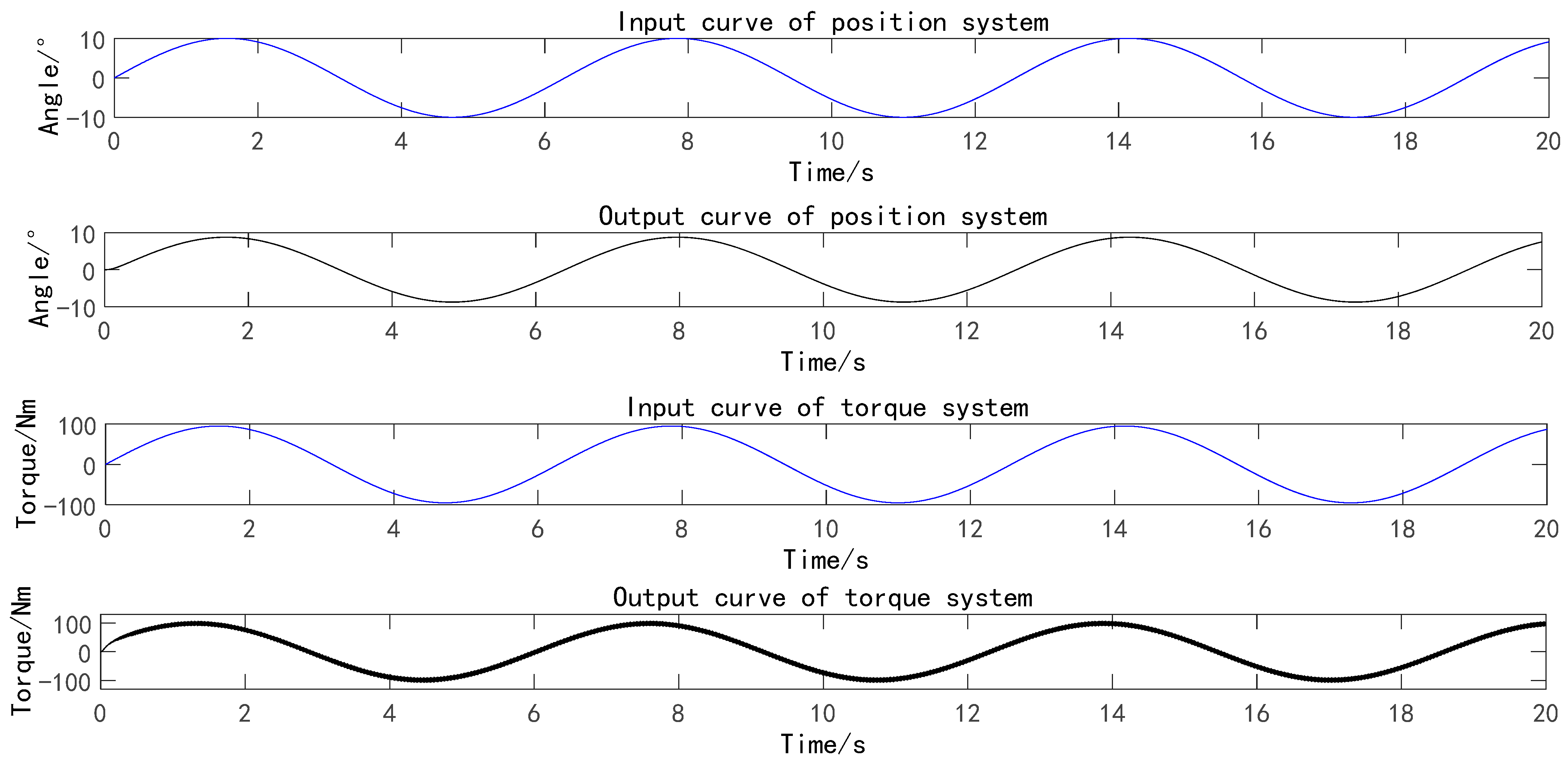
3. Servo Characteristics Analysis
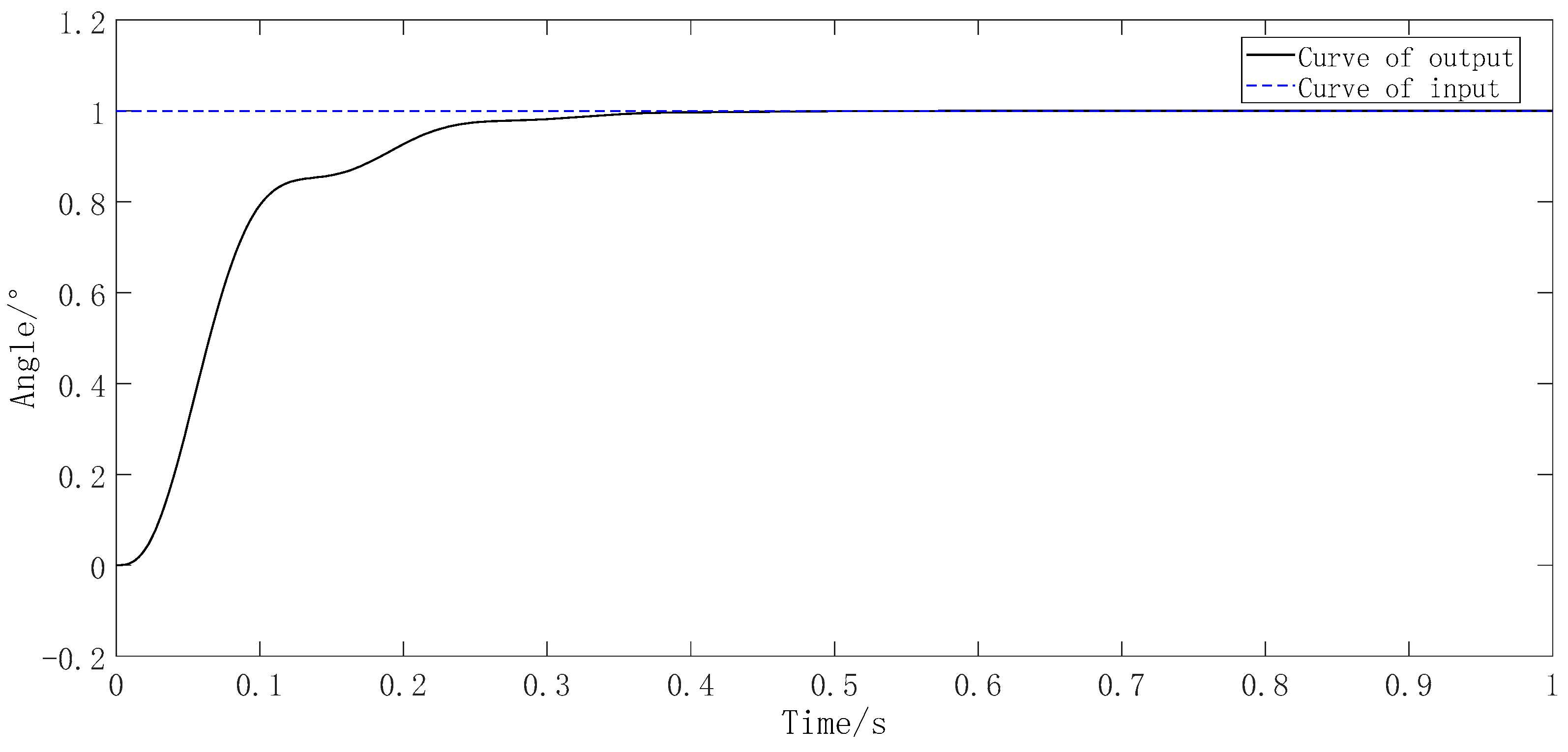
3.1. Simulation and Analyze
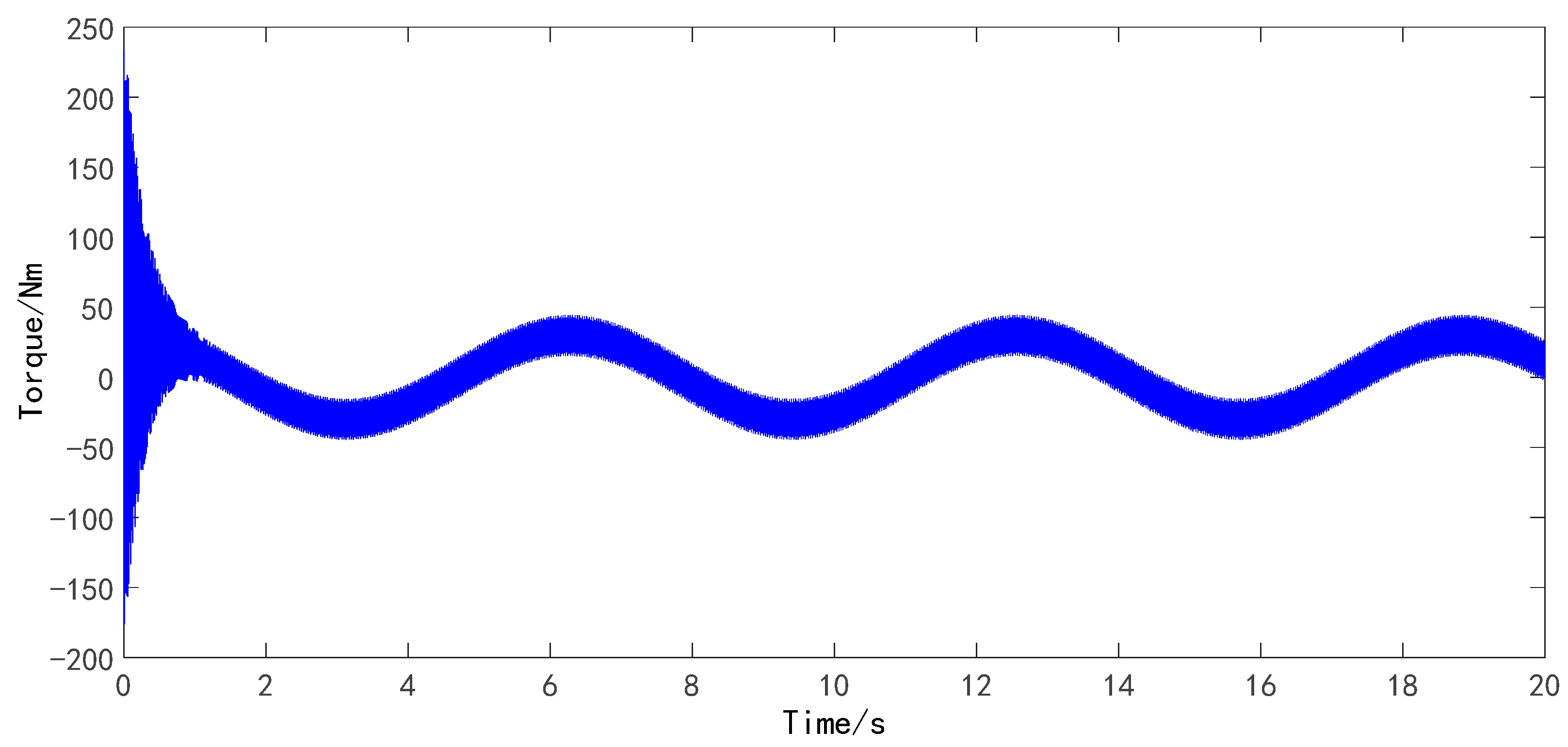
3.2. Interference Torque Suppression Based on Dynamic Compensation
3.3. System Simulation and Analysis
4. Robust Controller Design
4.1. System State-Space Equations
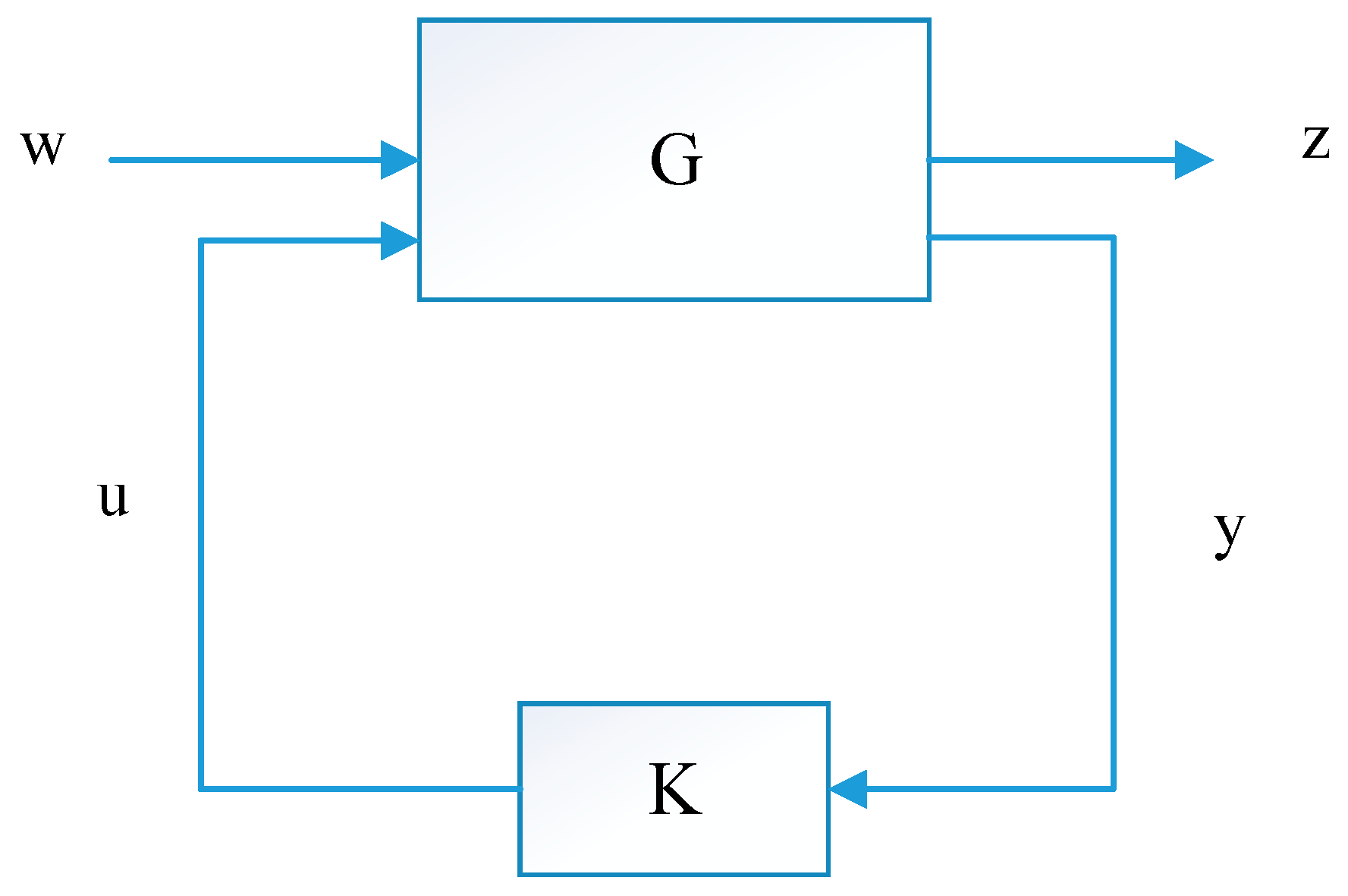
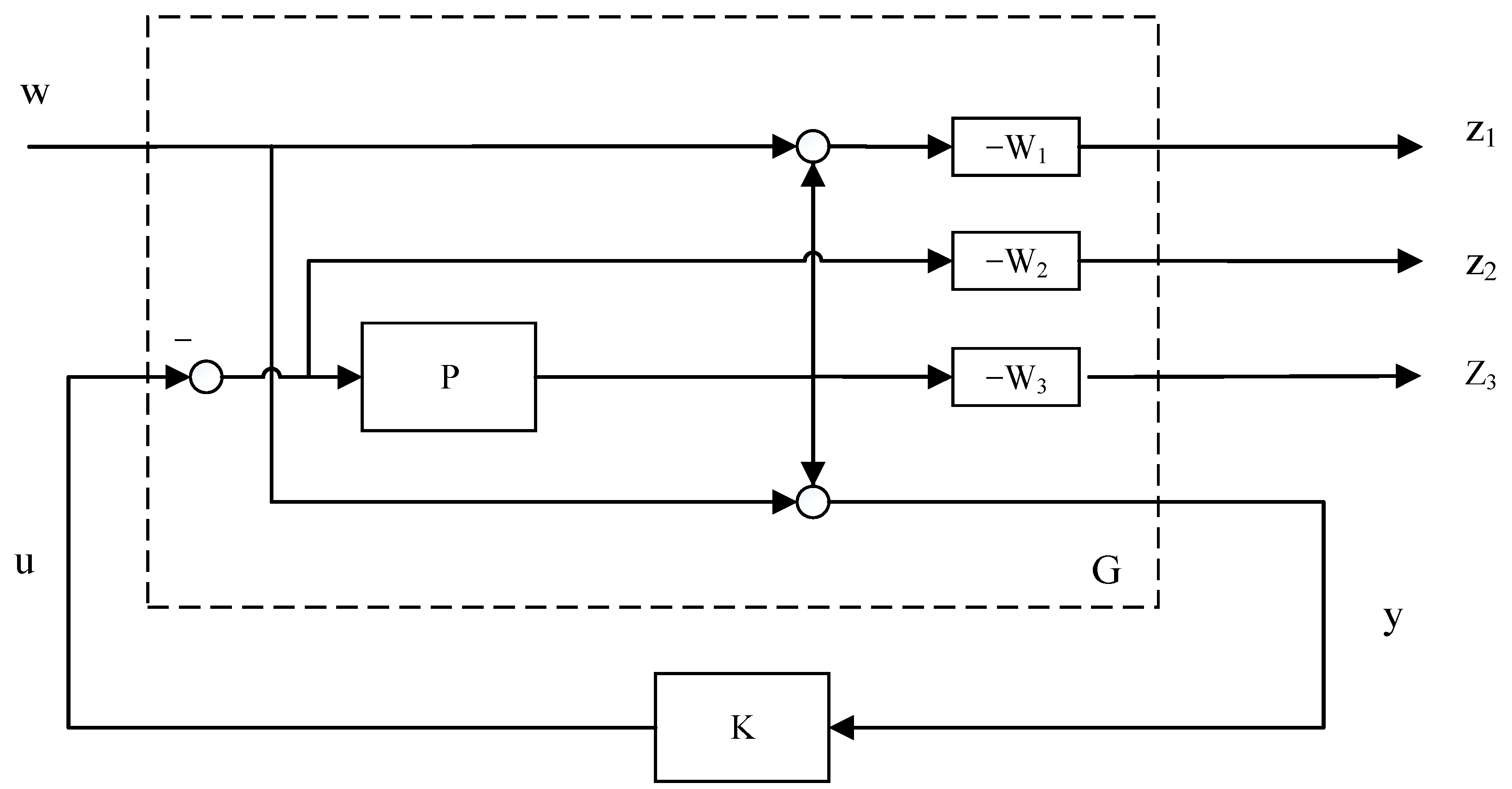
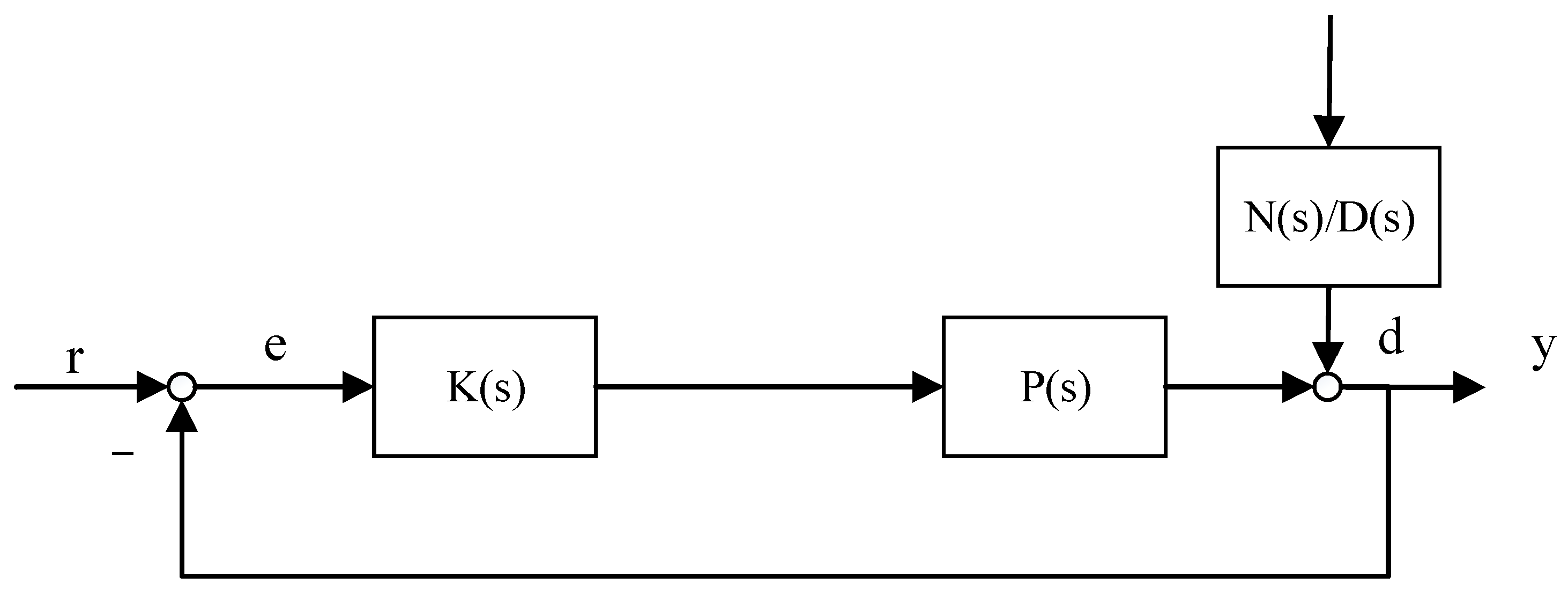
4.2. Mixed Sensitivity Control Problem
4.3. Controller Design
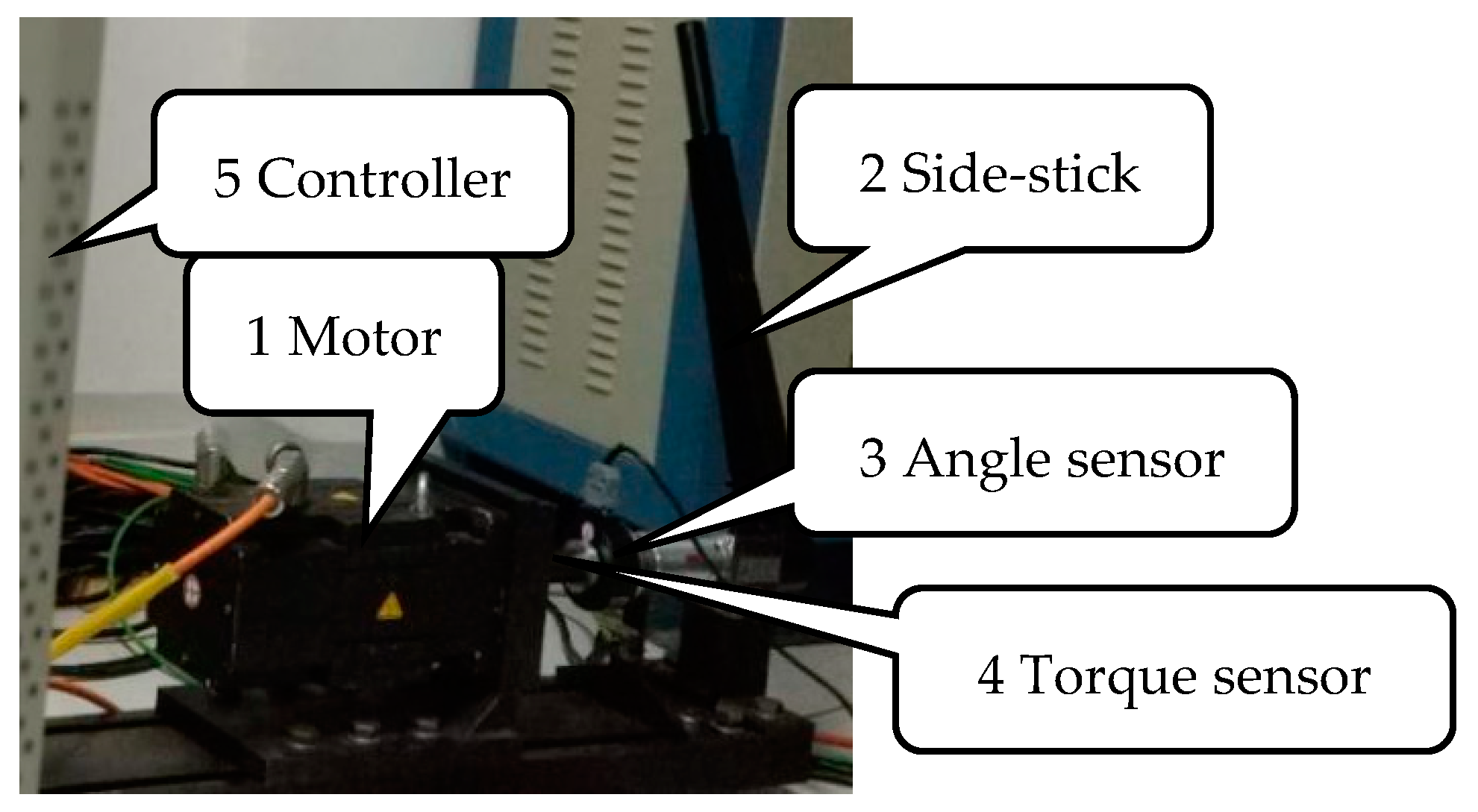
5. Experimental Study
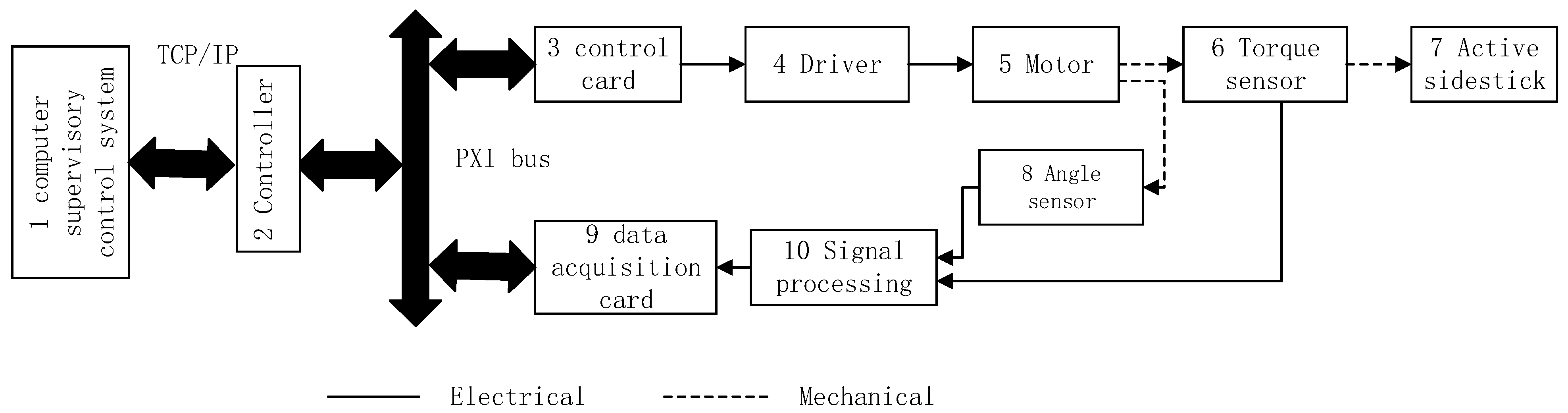
5.1. Test Scheme
- (1)
- NI-9263 is used for the instruction of the analog output module as the actuator. NI-9263 is a 4-channel 100 kS/s synchronous update analog output module. The 0-1 and 4-5 channel output torque and position analog signals are used in this test bench.
- (2)
- NI-9215 is an analog input card with 16 channels, 100 kS/s/channel, 16 bits, ±10 V analog input module. NI-9215 can perform differential simulation inputs.
- (3)
- Counters and timers are NI-9411. The NI-9215 counter input module has 8 channels and can directly collect digital quantity. Users can configure it to be differential or single-ended.
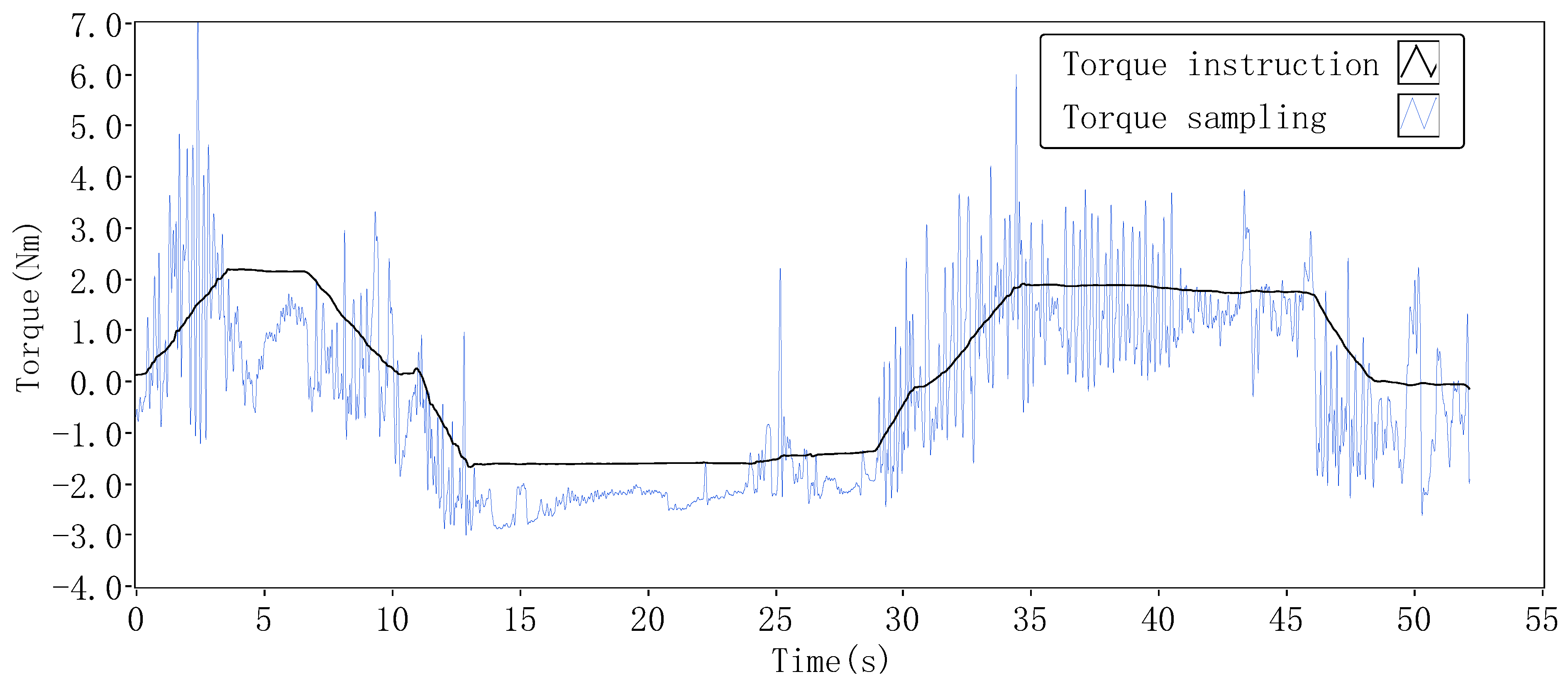
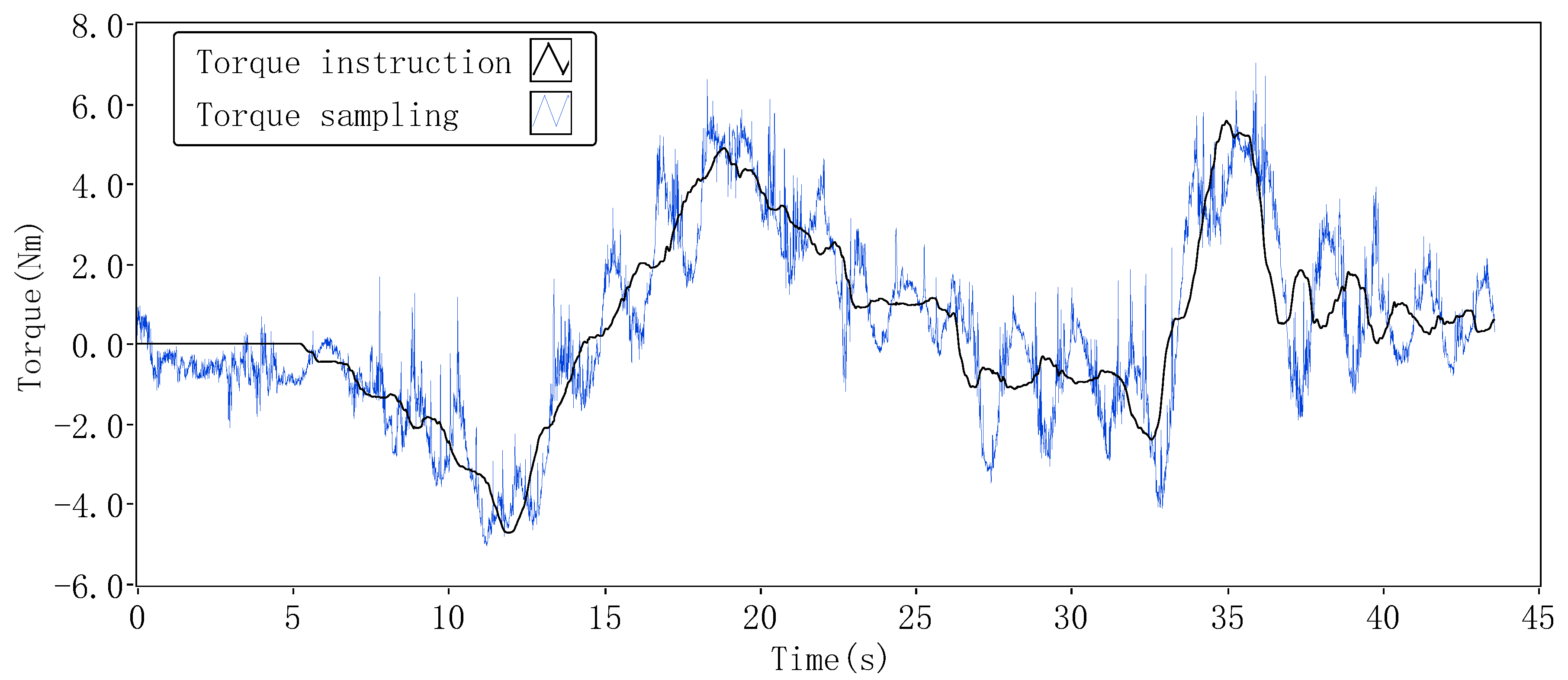
5.2. Test Results
6. Summary and Conclusions
- (1)
- Different to traditional fly-by-wire technology, this paper proposes the design principle of the side-stick in an artificial feel system. The ACS was divided into position system and torque system for modeling and analysis, respectively. The two subsystems were coupled to form a comprehensive system, and the transfer functions of the command channel and the interference channel were solved. The comprehensive model of the subsystem and the coupling state was simulated and analyzed.
- (2)
- The servo characteristics of the system were analyzed, and the position closed-loop system and the torque closed-loop system were preliminarily designed. At the same time, the factors that cause the instability of the system were discussed, and the influences of inertia, clearance, damping and stiffness on the system were also discussed. The causes of the interference torque were studied. The structure invariance principle was adopted to compensate for the torque closed-loop system, and the software adjustment strategy was used to compensate for the torque generated by the interference.
- (3)
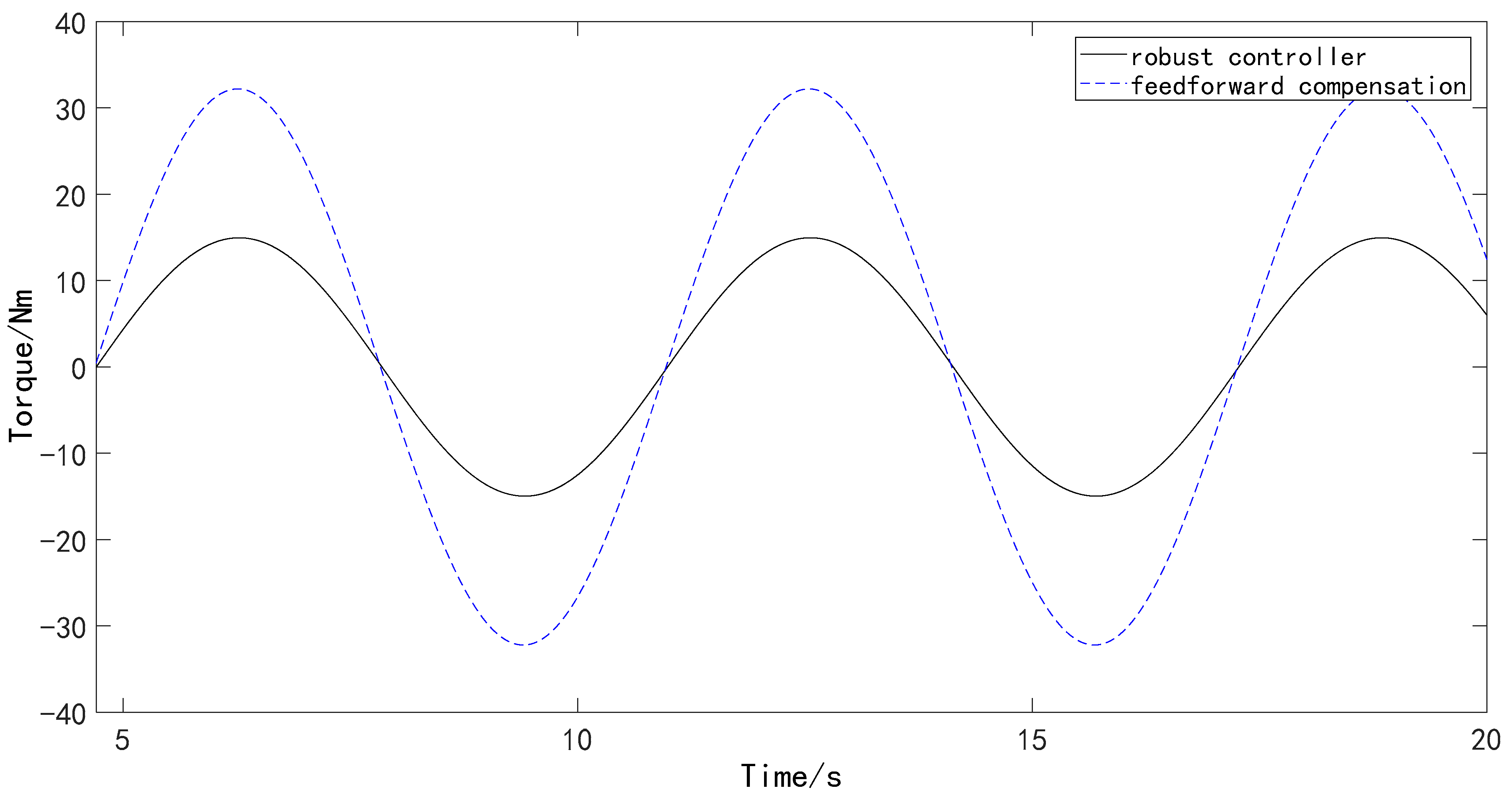
- This paper proposes a robust control method for active side-stick manipulation based on . The designed torque closed-loop system has uncertainty and external perturbation, which is in line with the applicable environment of the robust controller. It proved that the effect of robust control on suppressing external disturbance of the system was good. Compared with dynamic compensation, the effect of suppressing disturbance is more obvious, and the robustness of the system is significantly enhanced.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Burns, B.R.A. Fly-by-wire and control configured rewards and risks. Aeronaut. J. 2016, 79, 51–58. [Google Scholar]
- Dlamini, Z.; Jones, T. Fly-by-wire robustness to flight dynamics change under horizontal stabiliser damage. Aeronaut. J. 2016, 120, 1005–1023. [Google Scholar] [CrossRef]
- Rushby, J.M. Formal specification and verification of a fault-masking and transient-recovery model for digital flight-control systems. In Proceedings of the International Symposium on Formal Techniques in Real-Time and Fault-Tolerant Systems, Nijmegen, The Netherlands, 8–10 January 1992; pp. 237–257. [Google Scholar]
- David, M.; Euan, M.; Stewart, H. MIMO Sliding Mode Attitude Command Flight Control System for a Helicopter. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, CL, USA, 15–18 August 2005. [Google Scholar]
- Wang, X.; Wang, S.; Yao, B. Adaptive robust torque control of electric load simulator with strong position coupling disturbance. Int. J. Control. Autom. Syst. 2013, 11, 325–332. [Google Scholar] [CrossRef]
- Jiao, Z.; Hua, Q.; Wang, X.; Wang, S. Compound control of electro-hydraulic load simulator. Chin. J. Mech. Eng. 2002, 38, 685–689. [Google Scholar] [CrossRef]
- Qing, H.; Zongxia, J. CRNN neural network control of the load simulator. Chin. J. Mech. Eng. 2003, 38, 15–19. [Google Scholar]
- Jiao, Z.; Hua, Q. RBF neural network control on electrohydraulic load simulator. Chin. J. Mech. Eng. 2003, 39, 10–14. [Google Scholar] [CrossRef]
- Guo, C.; Yang, R.; Zhang, P.; Fu, M. The control algorithm improving performance of electric load simulator. In Proceedings of the Seventh International Conference on Electronics and Information Engineering. International Society for Optics and Photonics, Nanjing, China, 17–18 September 2016. [Google Scholar]
- Guo, B.Z.; Zhao, Z.L. Active Disturbance Rejection Control for Nonlinear Systems: An Introduction; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Liu, Y.; Gao, X.; Pei, Z. Research of Impact Load in Large Electrohydraulic Load Simulator. Math. Probl. Eng. 2014, 2014, 1–7. [Google Scholar] [CrossRef]
- Fergani, S.; Allias, J.F.; Briere, Y.; Defay, F. A novel structure design and control strategy for an aircraft active sidestick. In Proceedings of the Control & Automation, Athens, Greece, 21–24 June 2016. [Google Scholar]
- Chang, J.; Shen, D.; Chen, D. Active Disturbance Rejection Control Tuned by Whale Optimization Algorithm for Electric Loading System. In Proceedings of the 39th Chinese Control Conference, Shenyang, China, 27–29 July 2020; pp. 1150–1154. [Google Scholar]
- Li, T.; Zhang, B.; Feng, Z.; Zheng, B. Robust Control with Engineering Applications. Math. Probl. Eng. 2014, 2014, 567672. [Google Scholar] [CrossRef]
- Wang, C.; Hou, Y.; Liu, R.; Gao, Q.; Hou, R. Control of the Electric Load Simulator Using Fuzzy Multiresolution Wavelet Neural Network with Dynamic Compensation. Shock. Vib. 2016, 2016, 3574214. [Google Scholar] [CrossRef]
- Chenggong, L.; Hongtao, J.; Zongxia, J. Mechanism and suppression of extraneous torque of motor driver load simulator. J. Beijing Univ. Aeronaut. Astronaut. 2006, 32, 204–208. [Google Scholar]
- Otto, C.; Petr, H. Adaptive fuzzy sliding mode control for electro-hydraulic servo mechanism. Expert Syst. Appl. 2012, 39, 10269–10277. [Google Scholar]
- Zhang, H.; Yang, S. On energy-to-peak filtering for nonuniformly sampled nonlinear systems: A Markovian Jump System Approach. IEEE Trans. FUZZY Syst. 2014, 22, 212–222. [Google Scholar] [CrossRef]
- Lü, S.-S.; Lin, H.; Fan, M.D. Electric loading system with multiclosed-loop control. Electr. Mach. Control. 2015, 19, 16–22. [Google Scholar]
- Bae, H.R.; Daniel, C.L.; Alyanak, E. Sequential Subspace Robustness Assessment and Sensitivity Analysis. AIAA J. 2016, 55, 1–14. [Google Scholar]
- Ting, Z.; Rui, L. Improved Tracking Differentiator and Fuzzy PID for Electric Loading System. In Proceedings of the 4th International Conference on Mechatronics, Materials, Chemistry and Computer Engineering, Xi’an, China, 12–13 December 2015. [Google Scholar]
- Stîngă, F.; Marian, M.; Selișteanu, D. Robust Estimation-Based Control Strategies for Induction Motors. Complexity 2020, 2020, 9235701. [Google Scholar] [CrossRef]
- Shuai, Y.U.; Dong-Po, B. Research of Robust Control for Electro-Hydraulic Servo Loading System. Meas. Control. Technol. 2009, 28, 58–61. [Google Scholar]
- Wang, J.; Liang, L.; Zhang, S.; Ye, Z.; Li, H. Application of Control Based on Mixed Sensitivity in the Electro-hydraulic Load Simulator. In Proceedings of the International Conference on Mechatronics & Automation, Harbin, China, 5–8 August 2007. [Google Scholar]
- Kosut, R.L.; Emami-Naeini, A.; Salzwedel, H. Robust Control of Flexible Spacecraft. J. Guid. Control. Dyn. 1971, 6, 104–111. [Google Scholar] [CrossRef]
- Choi, J.; Ryu, H.S.; Kim, C.W.; Choi, J.H. An efficient and robust contact algorithm for a compliant contact force model between bodies of complex geometry. Multibody Syst. Dyn. 2010, 23, 99–120. [Google Scholar] [CrossRef]
- Gu, Da.; Zhang, Da.; Liu, Yi. Robust Parametric Control of Lorenz System via State Feedback. Complexity 2020, 2020, 6548142. [Google Scholar] [CrossRef]
- Monmasson, E.; Cirstea, M.N. Design Methodology for Industrial Control Systems—A Review. IEEE Trans. Ind. Electron. 2007, 54, 1824–1842. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value | Unit |
|---|---|---|
| 0.0689 | ||
| 0.0495 | ||
| 0.0297 | H | |
| 2.36 | ||
| 0.39 | ||
| 0.34 | ||
| 1.258 | ||
| 7.9 | ||
| 10,585 | ||
| 11,421 | ||
| 0.41 | ||
| 25 | N/m | |
| 0.5 | m | |
| 0.16 | ||
| 0.0135 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Liu, J.; Wang, Q.; Zhu, Y. Mixed Sensitivity Servo Control of Active Control Systems. Machines 2022, 10, 842. https://doi.org/10.3390/machines10100842
Zhou Y, Liu J, Wang Q, Zhu Y. Mixed Sensitivity Servo Control of Active Control Systems. Machines. 2022; 10(10):842. https://doi.org/10.3390/machines10100842
Chicago/Turabian StyleZhou, Yanjun, Jian Liu, Qingyu Wang, and Yunan Zhu. 2022. "Mixed Sensitivity Servo Control of Active Control Systems" Machines 10, no. 10: 842. https://doi.org/10.3390/machines10100842
APA StyleZhou, Y., Liu, J., Wang, Q., & Zhu, Y. (2022). Mixed Sensitivity Servo Control of Active Control Systems. Machines, 10(10), 842. https://doi.org/10.3390/machines10100842