
Modeling and Dynamic Characteristics of a Novel High-Pressure and Large-Flow Water Hydraulic Proportional Valve


Abstract
:1. Introduction
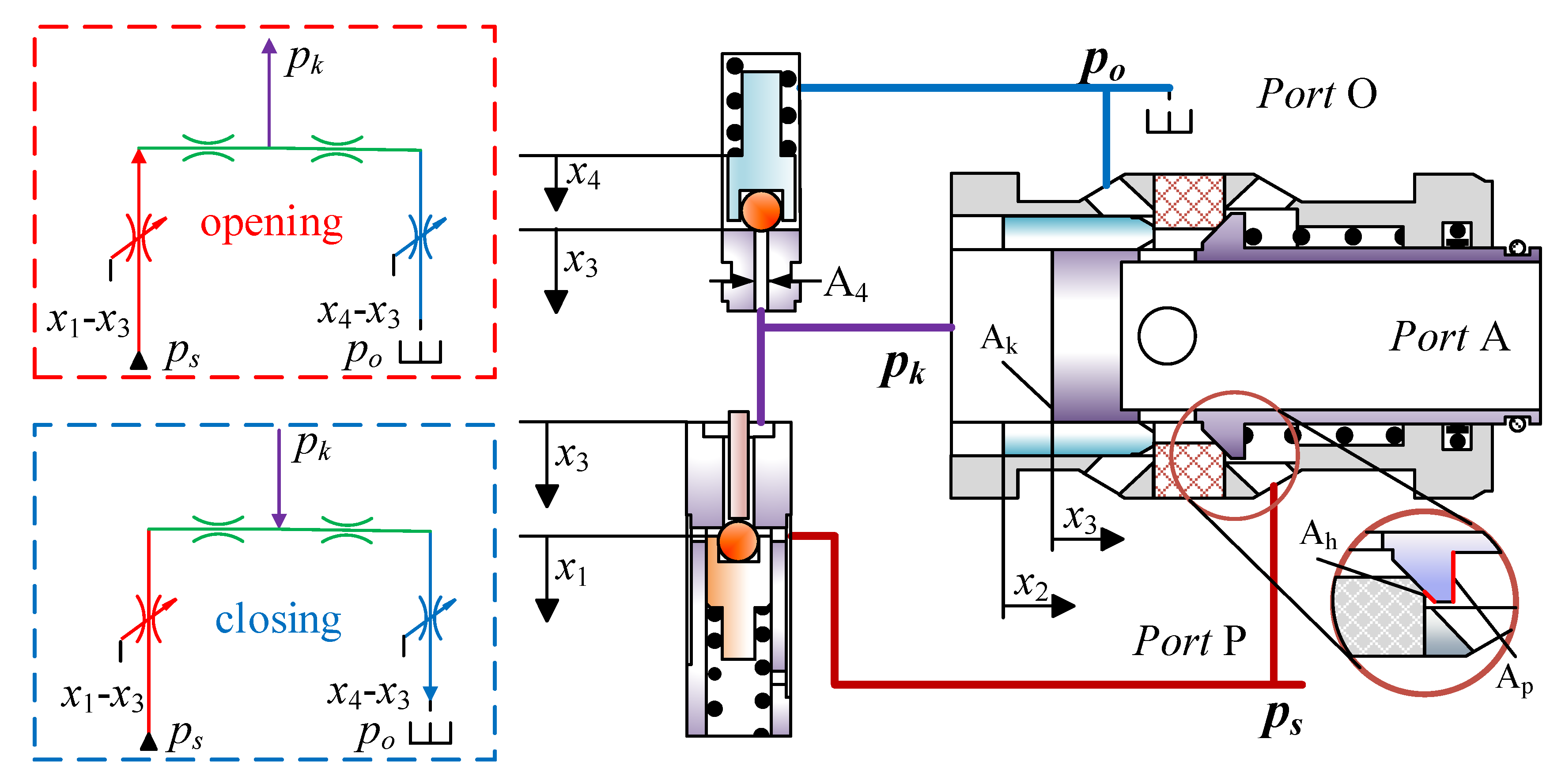
2. Structure and Working Principle
3. Comparison between Simulation and Experiment
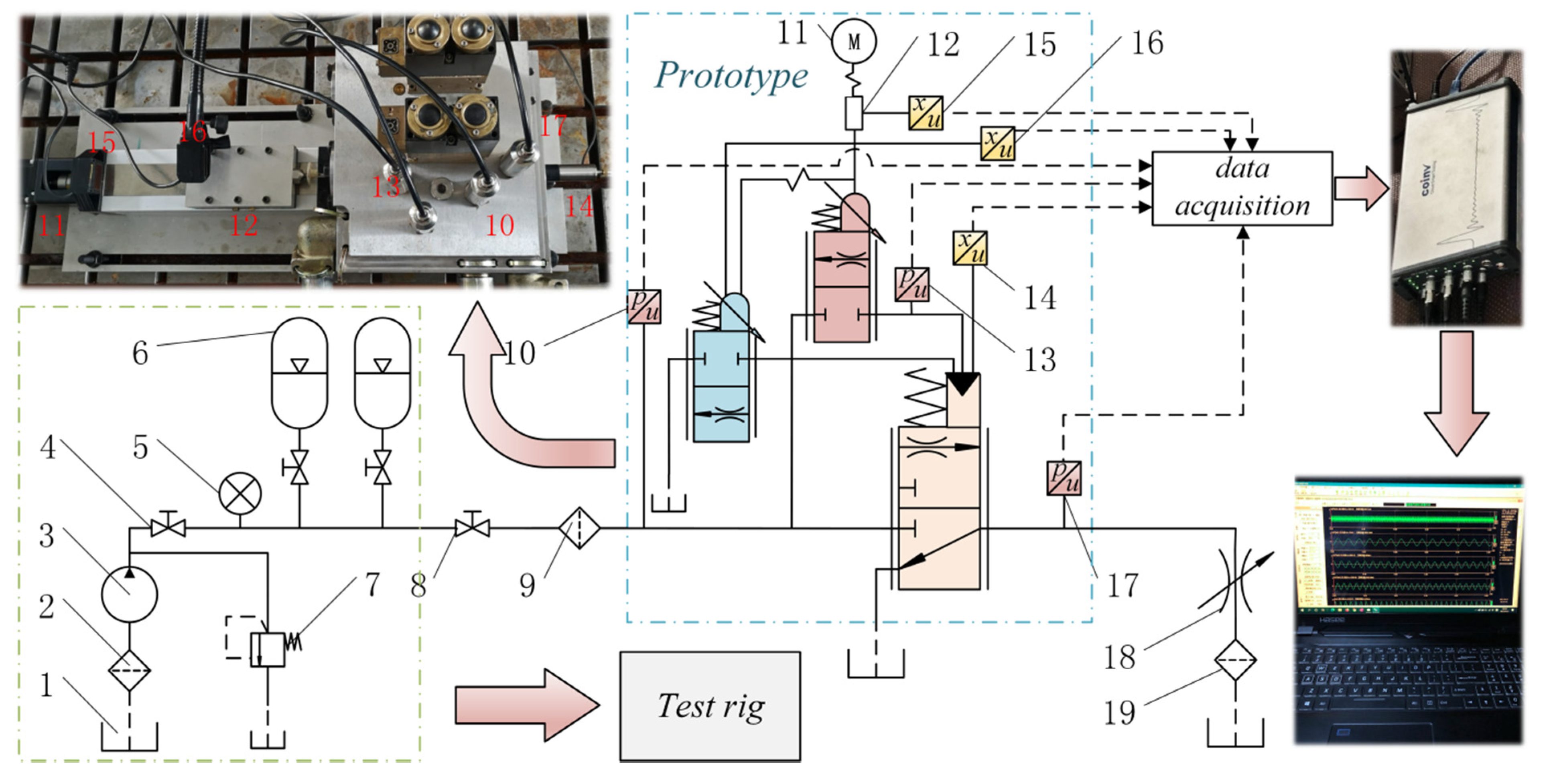
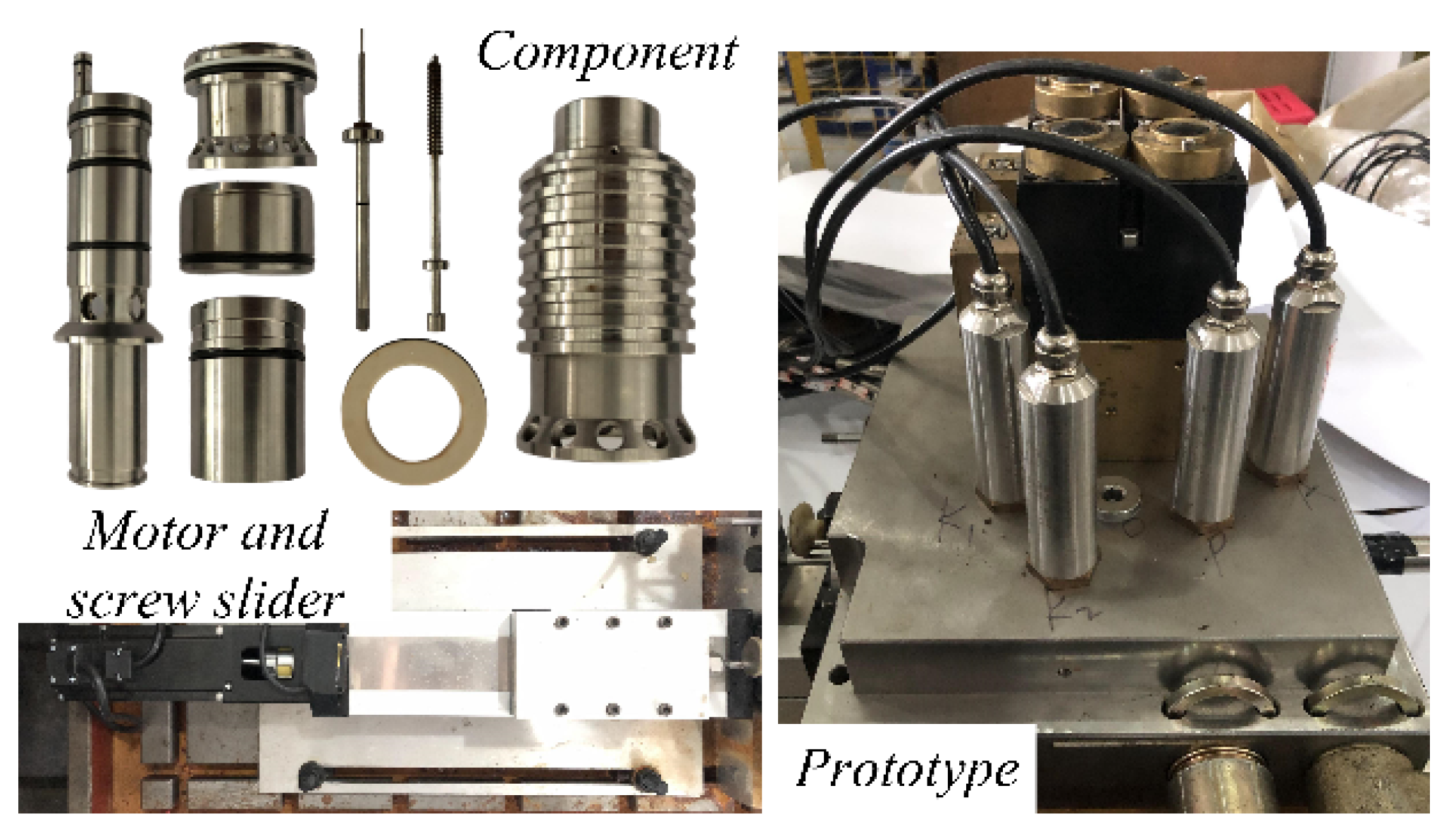
3.1. Methods and Materials
3.2. Simulation Method
- The influence of the pipeline is ignored.
- The friction generated by sealing rings of pilot valves is ignored.
- The flow force of the pilot valve port is ignored.
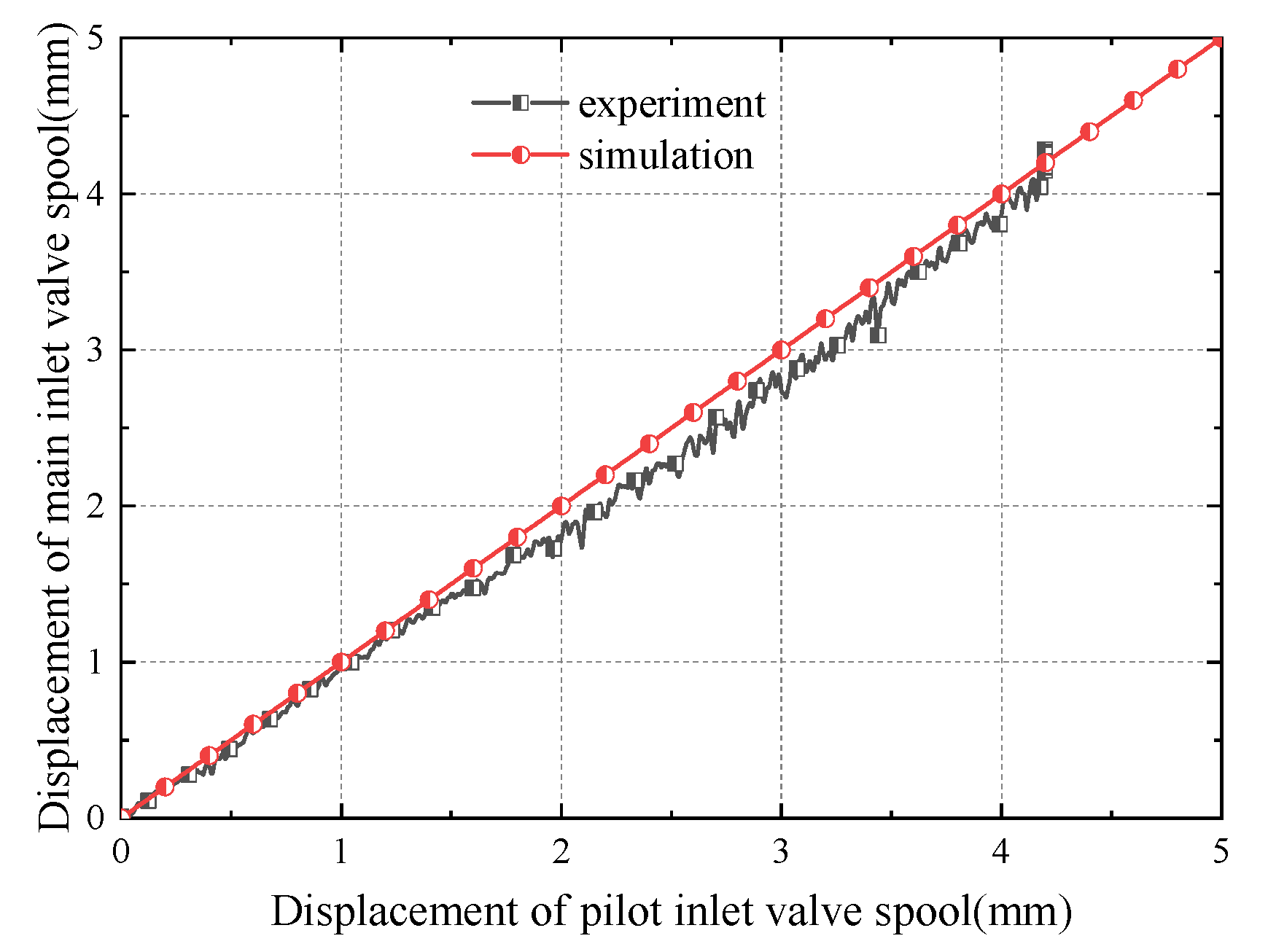
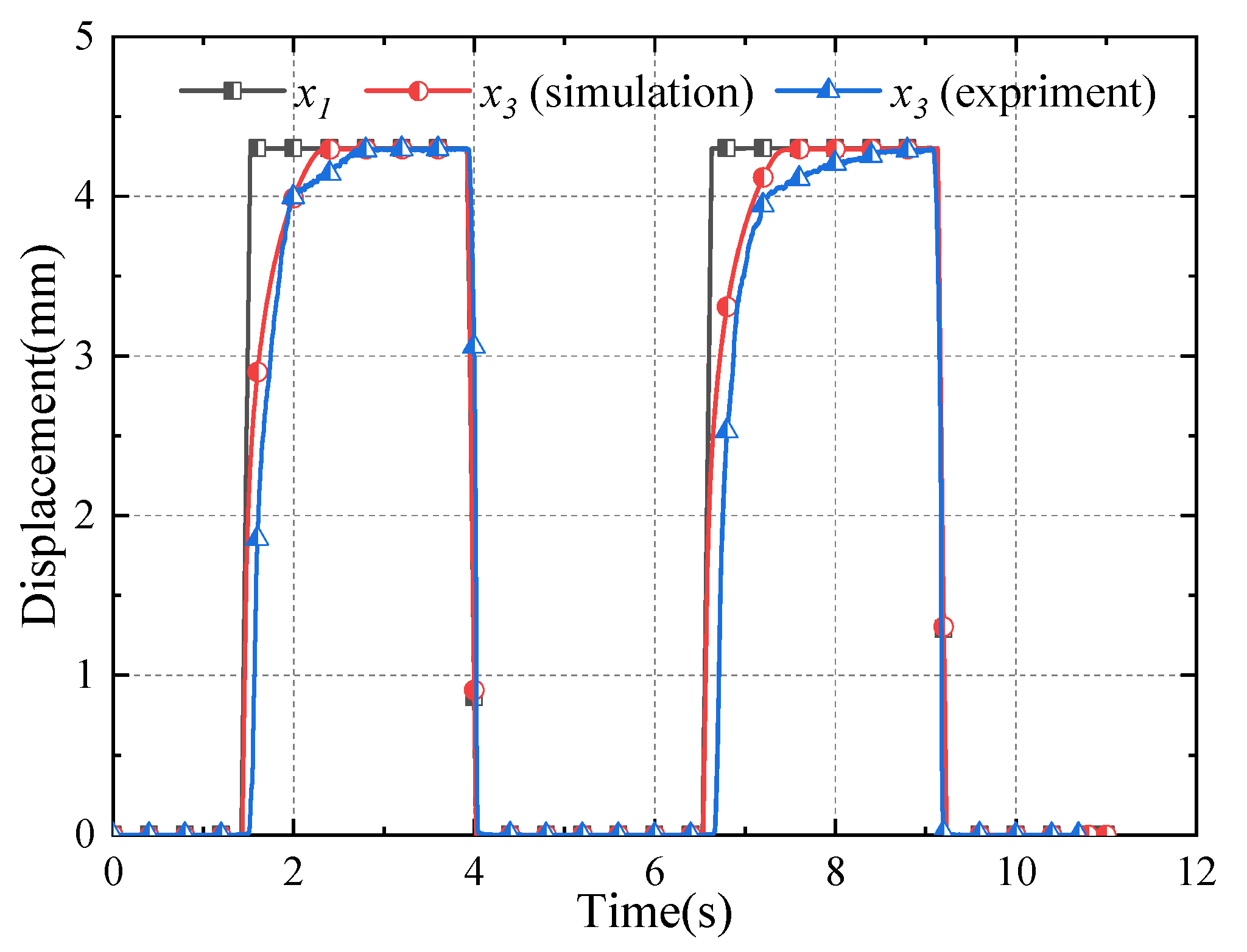
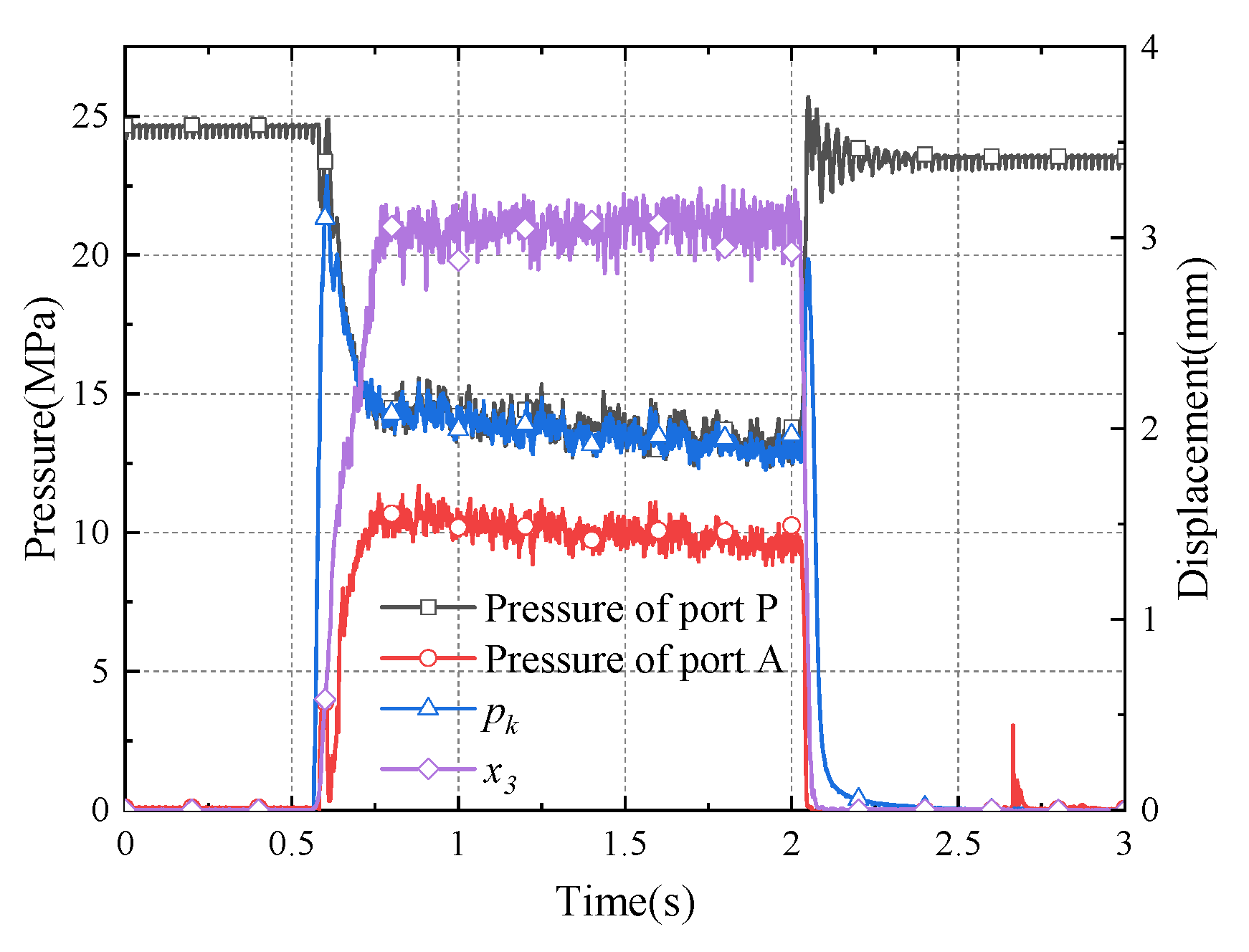
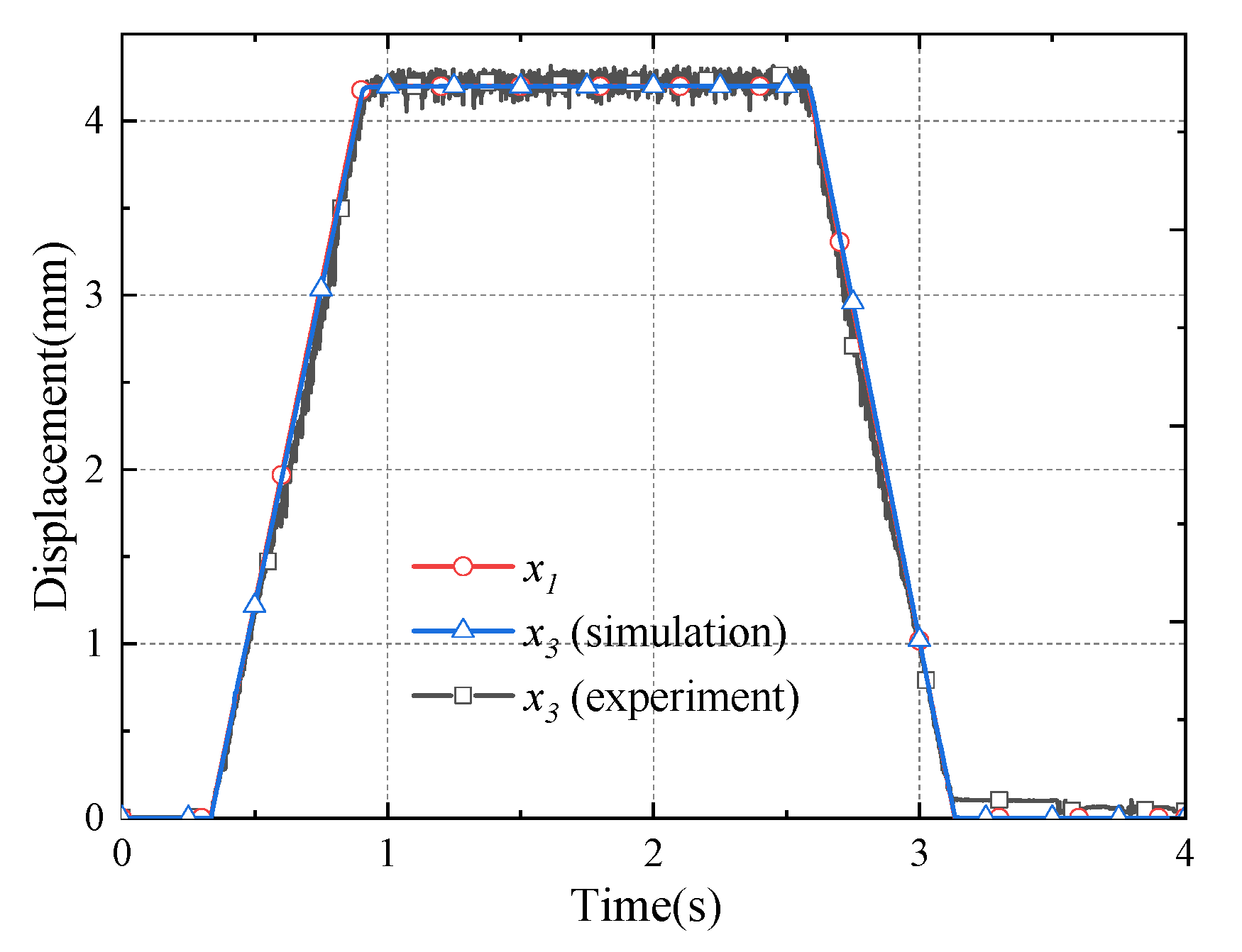
3.3. Results and Discussion
4. Performance Prediction
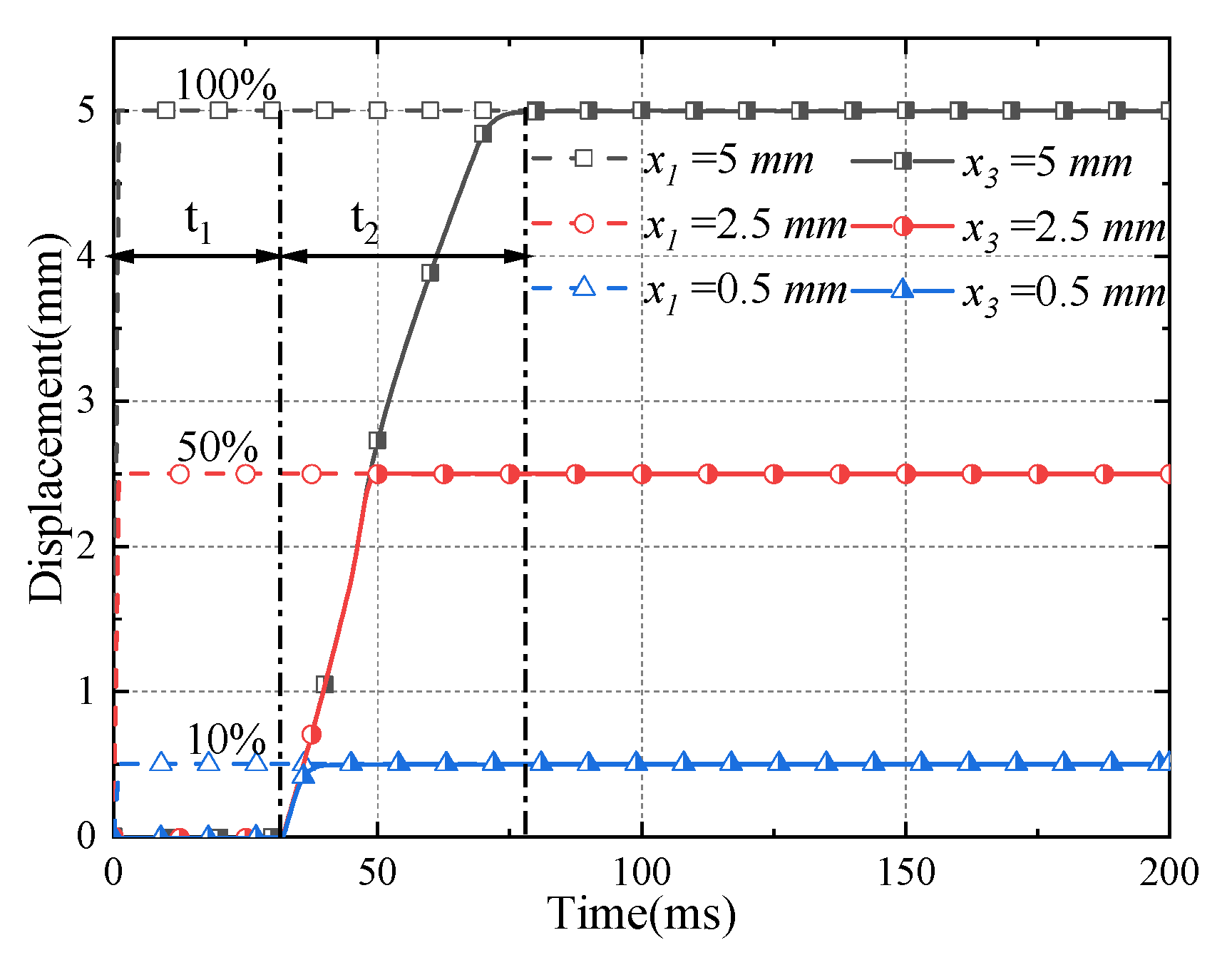
4.1. Performance Analysis
4.2. Stability Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lim, G.H.; Chua, P.S.K.; He, Y.B. Modern Water Hydraulics—The New Energy-Transmission Technology in Fluid Power. Appl. Energy 2003, 76, 239–246. [Google Scholar] [CrossRef]
- Majdic, F.; Pezdirnik, J.; Kalin, M. An Analytical Comparison of Hydraulic Systems Based on Water and on Oil. Proc. JFPS Int. Symp. Fluid Power 2008, 2008, 679–684. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Zhao, X.; Wu, D.; Li, D.; Li, X. Study on the Control Methods of a Water Hydraulic Variable Ballast System for Submersible Vehicles. Ocean Eng. 2015, 108, 648–661. [Google Scholar] [CrossRef]
- Park, S.-H. Development of a Proportional Poppet-Type Water Hydraulic Valve. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2009, 223, 2099–2107. [Google Scholar] [CrossRef]
- Fairfield, N.; Kantor, G.; Jonak, D.; Wettergreen, D. Autonomous Exploration and Mapping of Flooded Sinkholes. Int. J. Robot. Res. 2010, 29, 748–774. [Google Scholar] [CrossRef]
- Han, M.; Liu, Y.; Wu, D.; Tan, H.; Li, C. Numerical Analysis and Optimisation of the Flow Forces in a Water Hydraulic Proportional Cartridge Valve for Injection System. IEEE Access 2018, 6, 10392–10401. [Google Scholar] [CrossRef]
- Liao, Y.; Lian, Z.; Feng, J.; Yuan, H.; Zhao, R. Effects of Multiple Factors on Water Hammer Induced by a Large Flow Directional Valve. Stroj. Vestn. J. Mech. Eng. 2018, 64, 329–338. [Google Scholar] [CrossRef]
- Liao, Y.; Ren, H.; Zhang, D. Calculation method of flow force for the directional valve used on hydraulic roof support and its application. J. China Coal Soc. 2019, 44, 1609–1615. [Google Scholar] [CrossRef]
- Tang, W.; Xu, G.; Zhang, S.; Jin, S.; Wang, R. Digital Twin-Driven Mating Performance Analysis for Precision Spool Valve. Machines 2021, 9, 157. [Google Scholar] [CrossRef]
- Li, S.; Ruan, J.; Meng, B. Two-dimensional electro-hydraulic proportional directional valve. J. Mech. Eng. 2016, 52, 202–212. [Google Scholar] [CrossRef]
- Li, L.; Lin, Z.; Jiang, Y.; Yu, C.; Yao, J. Valve Deadzone/Backlash Compensation for Lifting Motion Control of Hydraulic Manipulators. Machines 2021, 9, 57. [Google Scholar] [CrossRef]
- Han, M.; Liu, Y.; Wu, D.; Zhao, X.; Tan, H. A Numerical Investigation in Characteristics of Flow Force under Cavitation State inside the Water Hydraulic Poppet Valves. Int. J. Heat Mass Transf. 2017, 111, 1–16. [Google Scholar] [CrossRef]
- Yao, J.; Yin, Y.; Dong, Z.; He, Y. Design of a 70 MPa Two-Way Proportional Cartridge Valve for Large-Size Hydraulic Forging Press. J. Beijing Inst. Technol. 2020, 29, 260–272. [Google Scholar] [CrossRef]
- Eriksson, B. Control Strategy for Energy Efficient Fluid Power Actuators: Utilizing Individual Metering; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Wang, S.; Zhao, H.; Quan, L. Research on the dynamic and static characteristics of electro-hydraulic proportional direction valve with flow feedback. J. Mech. Eng. 2014, 50, 205–212. [Google Scholar] [CrossRef]
- Huang, J.; Wang, X.; Wang, H.; Hao, H. Development of a Flow Control Valve with Digital Flow Compensator. Flow Meas. Instrum. 2019, 66, 157–169. [Google Scholar] [CrossRef]
- Zhang, J.; Xue, X.; Kou, C.; Yao, J.; Kong, X. Modeling of DN63 Displacement-follower Ultra High Pressure Proportional Cartridge Valves. China Mech. Eng. 2019, 30, 2424. [Google Scholar] [CrossRef]
- Han, M.; Liu, Y.; Zheng, K.; Ding, Y.; Wu, D. Investigation on the Modeling and Dynamic Characteristics of a Fast-Response and Large-Flow Water Hydraulic Proportional Cartridge Valve. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 4415–4432. [Google Scholar] [CrossRef]
- Zhao, R.; Liao, Y.; Lian, Z.; Li, R.; Guo, Y. Research on the Performance of a Novel Electro-Hydraulic Proportional Directional Valve with Position-Feedback Groove. Proc. Inst. Mech. Eng. Part E J. Process Mech. Eng. 2021, 235, 1930–1944. [Google Scholar] [CrossRef]
- Zhang, Z.; Meng, F.; Hou, J.; Wu, H.; Gong, Y. Design, simulation and experiments of water hydraulic throttle valve with direct voice coil motor actuation. J. China Coal Soc. 2017, 42, 275–281. [Google Scholar] [CrossRef]
- Suzuki, K.; Akazawa, S.; Nakao, Y. Development of cam-drive type proportional valve for water hydraulics. Int. J. Autom. Technol. 2012, 6, 450–456. [Google Scholar] [CrossRef]
- Wu, W.; Wei, C.; Zhou, J.; Hu, J.; Yuan, S. Numerical and Experimental Nonlinear Dynamics of a Proportional Pressure-Regulating Valve. Nonlinear Dyn. 2021, 103, 1415–1425. [Google Scholar] [CrossRef]
- Wang, H.; Wang, X.; Huang, J.; Quan, L. Flow Control for a Two-Stage Proportional Valve with Hydraulic Position Feedback. Chin. J. Mech. Eng. 2020, 33, 93. [Google Scholar] [CrossRef]
- Hagstrom, N.P.; Fikru, N.; Hargus, A.M.; Chase, T.R. A Novel Piezoelectrically Driven Miniature Proportional Pneumatic Control Valve Utilizing a Microfabricated Orifice Array. IEEEASME Trans. Mechatron. 2019, 24, 1931–1941. [Google Scholar] [CrossRef]
- Wu, D.; Wang, X.; Ma, Y.; Wang, J.; Tang, M.; Liu, Y. Research on the Dynamic Characteristics of Water Hydraulic Servo Valves Considering the Influence of Steady Flow Force. Flow Meas. Instrum. 2021, 80, 101966. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Parameters |
|---|---|
| DC servo motor | Rated power: 400 W |
| Rated speed: 3000 rpm | |
| Rated torque: 1.27 Nm | |
| Screw Slider | stroke: 100 mm |
| lead: 5 mm | |
| maximum thrust: 452 N | |
| repeated positioning accuracy: ±0.02 mm | |
| Data collector | Sampling channel: 8 channels |
| Sampling frequency: <102.4 kHz | |
| resolution ratio: 0.01% | |
| Pressure transducer | Pressure range: 0–60 MPa |
| Sampling frequency: <100 kHz | |
| accuracy class: 0.5%FS | |
| Displacement transducer | Displacement range: 0–100 mm |
| resolution ratio: 0.02% | |
| Sampling frequency: <500 Hz | |
| LVDT | Displacement range: 0–10 mm |
| linearity: ±1% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Liao, Y.; Tao, Z.; Lian, Z.; Zhao, R. Modeling and Dynamic Characteristics of a Novel High-Pressure and Large-Flow Water Hydraulic Proportional Valve. Machines 2022, 10, 37. https://doi.org/10.3390/machines10010037
Zhang H, Liao Y, Tao Z, Lian Z, Zhao R. Modeling and Dynamic Characteristics of a Novel High-Pressure and Large-Flow Water Hydraulic Proportional Valve. Machines. 2022; 10(1):37. https://doi.org/10.3390/machines10010037
Chicago/Turabian StyleZhang, Heng, Yaoyao Liao, Ze Tao, Zisheng Lian, and Ruihao Zhao. 2022. "Modeling and Dynamic Characteristics of a Novel High-Pressure and Large-Flow Water Hydraulic Proportional Valve" Machines 10, no. 1: 37. https://doi.org/10.3390/machines10010037
APA StyleZhang, H., Liao, Y., Tao, Z., Lian, Z., & Zhao, R. (2022). Modeling and Dynamic Characteristics of a Novel High-Pressure and Large-Flow Water Hydraulic Proportional Valve. Machines, 10(1), 37. https://doi.org/10.3390/machines10010037