
Effects of Currents on Human Freestyle and Breaststroke Swimming Analyzed by a Rigid-Body Dynamic Model




Abstract
1. Introduction
2. Dynamic model of Human Swimming
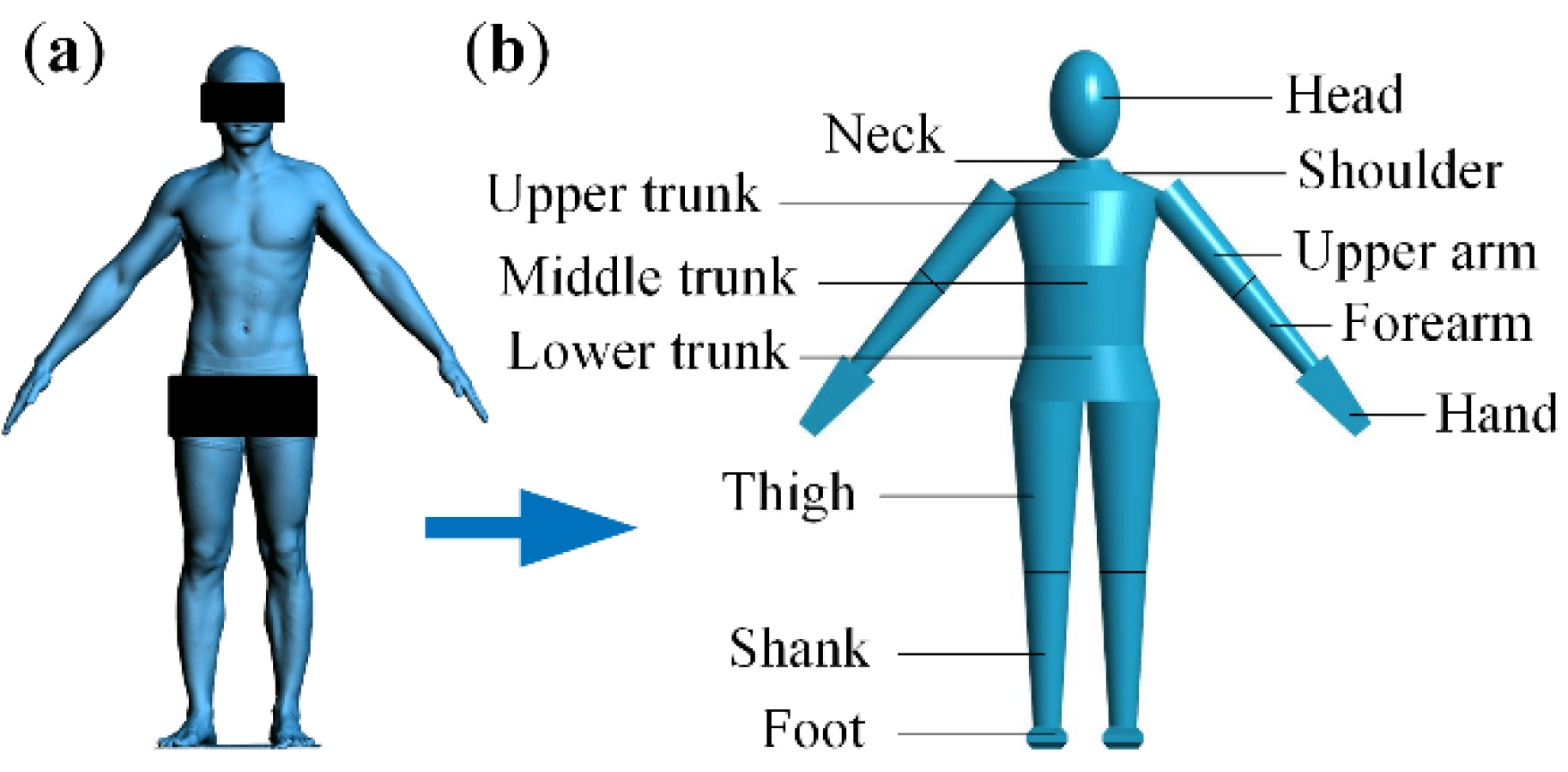
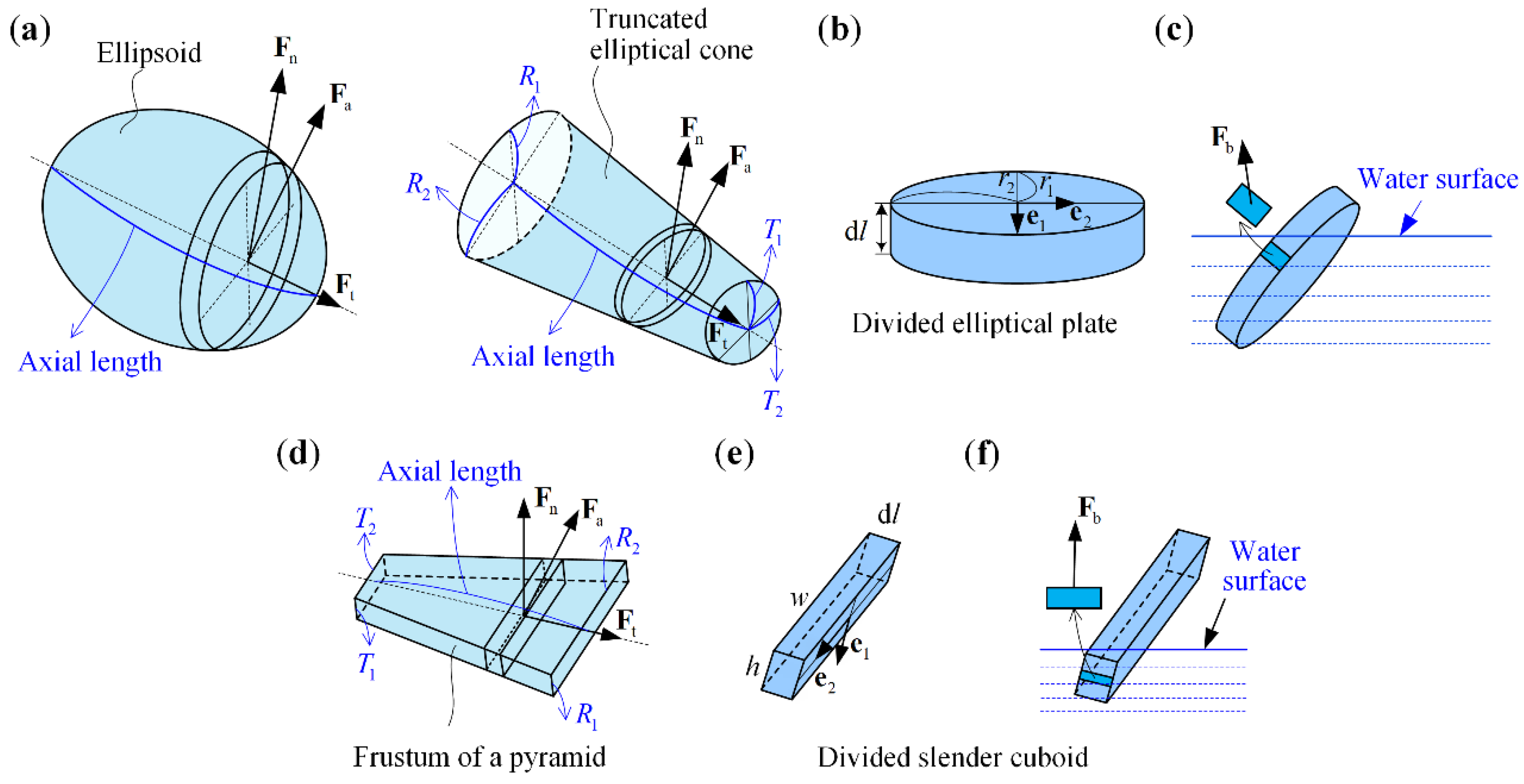
2.1. Geometric Modeling of the Human Body
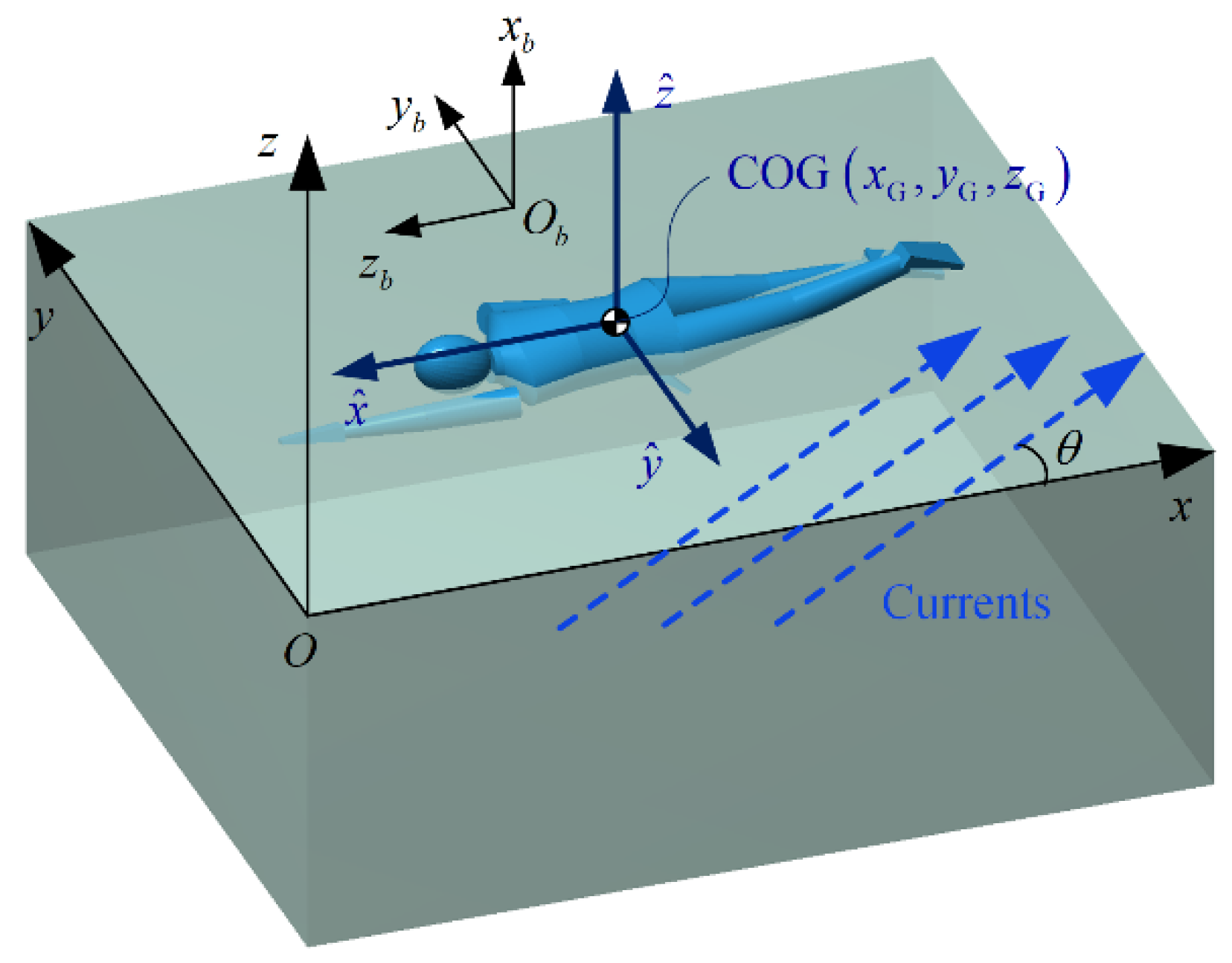
2.2. Rigid-Body Dynamic Model of Human Swimming Based on the Newton-Euler Approach
2.3. Modelling of the Fluid Forces
2.3.1. Passive Drag
2.3.2. Active Drag
2.3.3. The Buoyancy
2.3.4. Reduction of the Force System
2.4. Calculation Processes
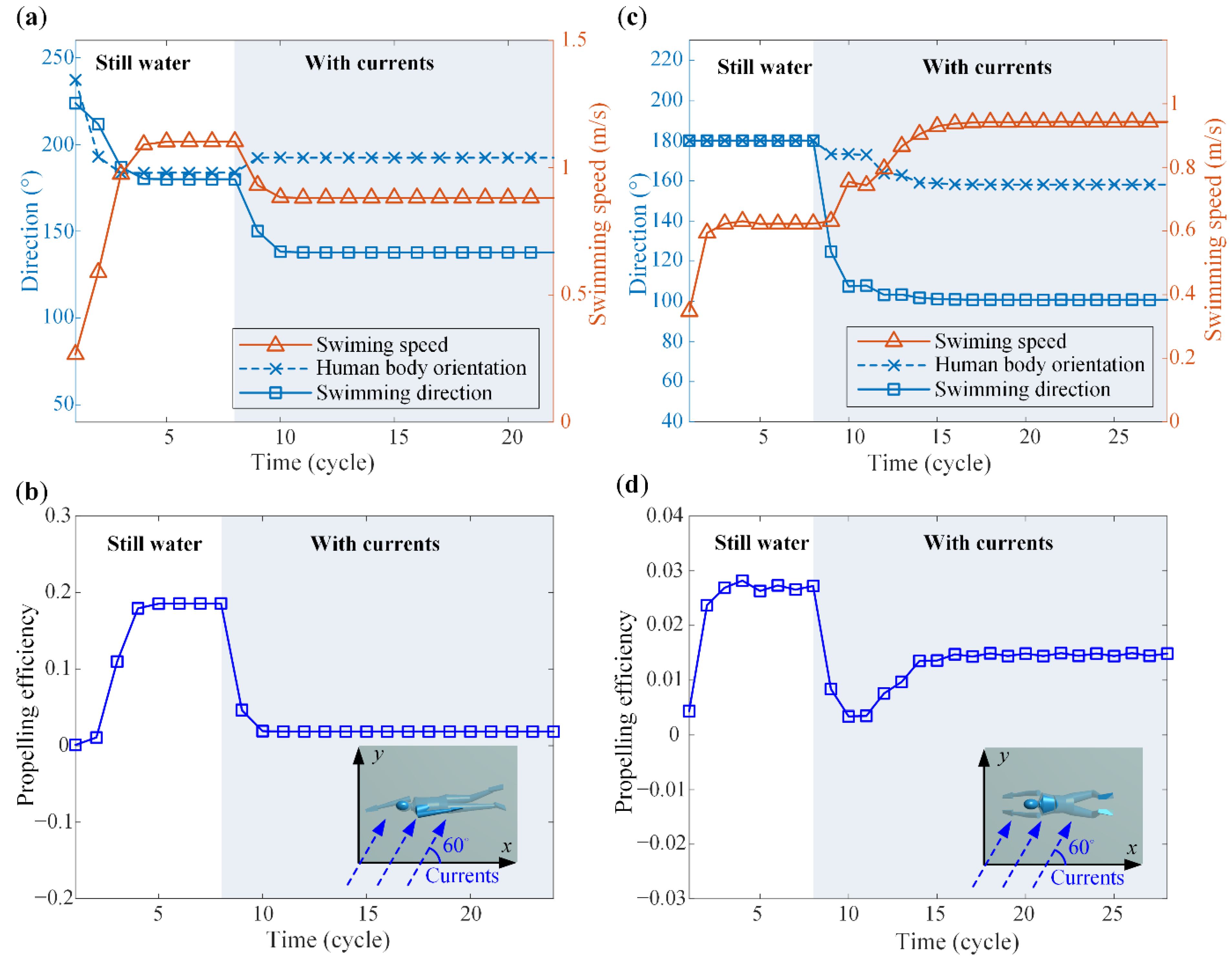
3. Freestyle and Breaststroke Swimming in the Presence of Currents: A Case Study
3.1. Swimming Performance Evaluation
3.2. Visualization of the Calculation Results
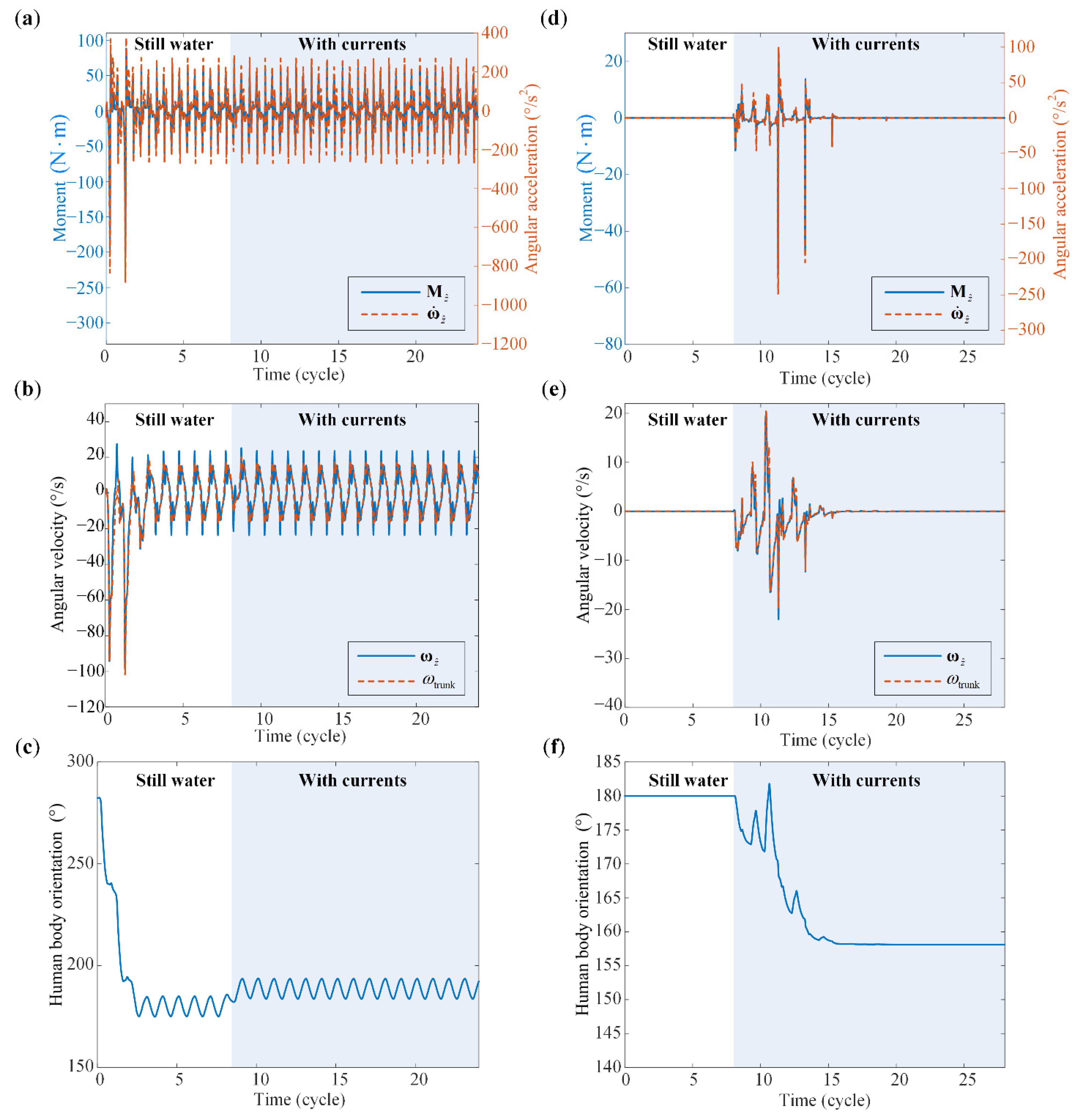
3.3. Swimming Direction Evolution: A Mechanical Explanation
3.3.1. The Change of Fluid Moment Caused by Currents
3.3.2. The Change of Angular Velocity Caused by Fluid Moment
3.3.3. The Change of Human Body Orientation Caused by the Angular Velocity
4. Effects of Currents on Freestyle and Breaststroke Swimming: Parameter Studies
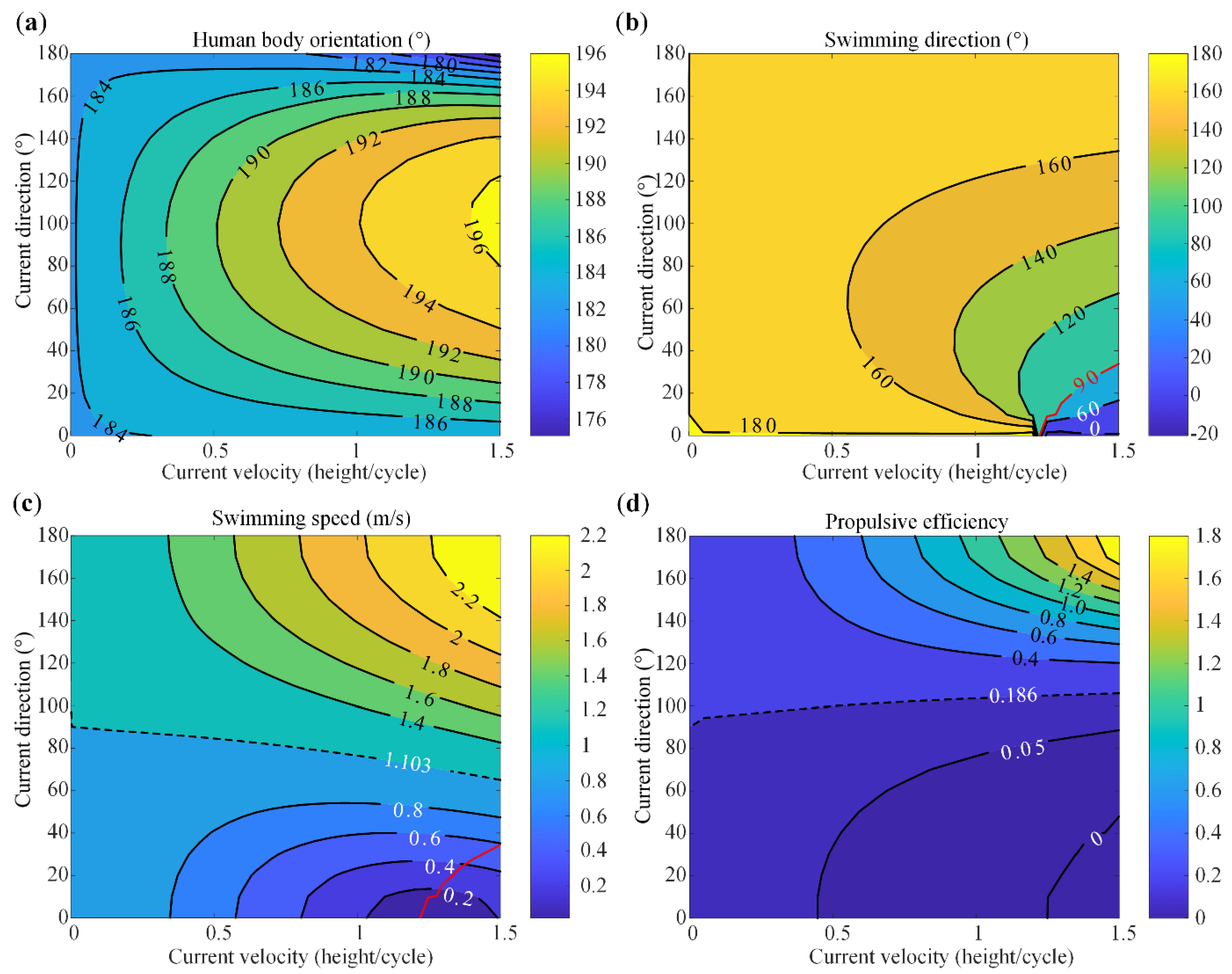
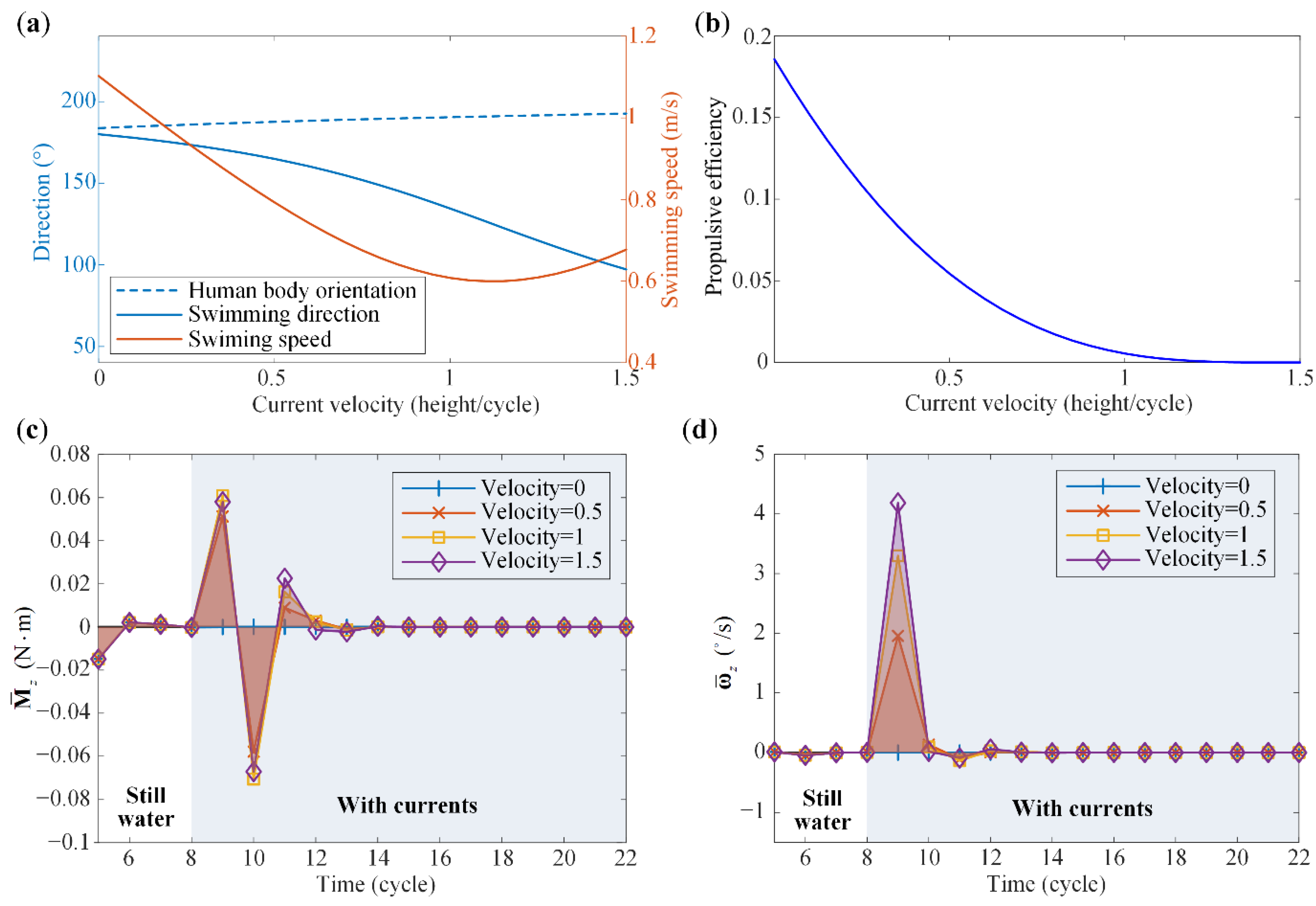
4.1. Freestyle Swimming Performance
- For all current conditions within the range, the human trunk turns counterclockwise. The maximum orientation angle is , which is achieved at the current with velocity 1.5 height/cycle (Figure 6a).
- In contrast to the human body orientation, for all current conditions, the human swimming direction turns clockwise (Figure 6b).
- In terms of the swimming speed, the current can play either a positive role or a negative role. Taking the swimming speed in still water (i.e., 1.103 m/s, denoted by black dashed lines) as a reference, currents with a relatively larger angle (say, ) could contribute to the swimming speed (Figure 6c).
- The red curve (Figure 6b,c) corresponds to the current conditions under which the human swims along the direction, and the human body’s absolute speed along the direction is zero under the action of currents. Crossing this critical curve to the right, the human body can no longer resist the drag of currents to swim forward (i.e., to swim toward the negative direction).
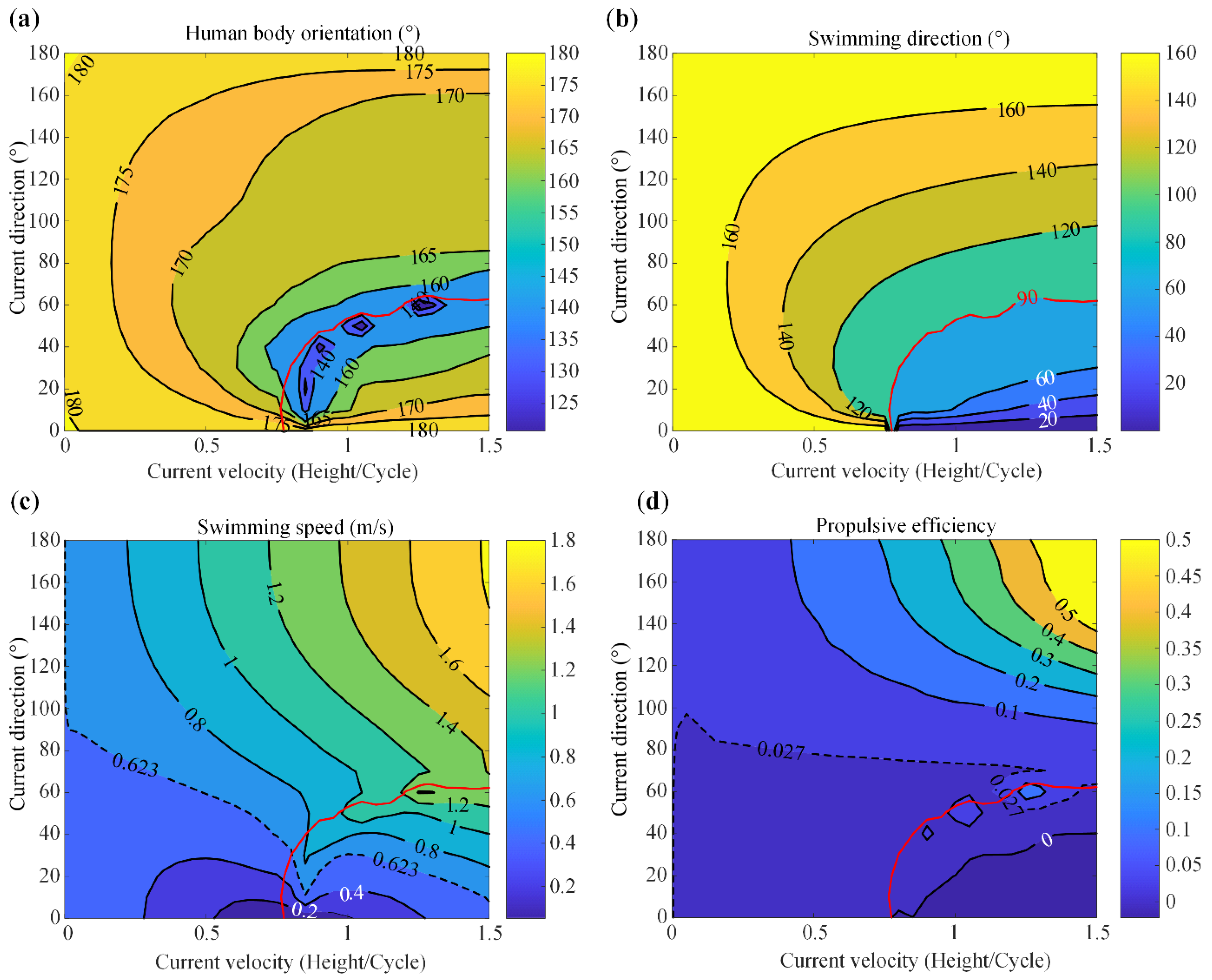
- For a fixed current direction, the human body orientation angle increases with the current velocity (i.e., more counterclockwise, Figure 6a), while the swimming direction angle tends to diminish (i.e., more clockwise, Figure 6b). Depending on the current direction, the swimming speed climbs with the current velocity when the current direction is relatively large and drops when the current direction is relatively small (Figure 6c).
- For a fixed current velocity, with the increase of the current angle the counterclockwise turning angle of the human trunk grows first and then declines. Particularly, if the current angle is or , the human trunk does not turn (Figure 6a). In terms of the swimming speed, it always rises with the current angle (Figure 6c).
- The current could serve as either a positive or negative factor in terms of the propulsive efficiency (Figure 6d). Particularly, the propulsive efficiency can decrease to zero or negative when the counter-current velocity is too high for the human to achieve net velocity along with the human body orientation.
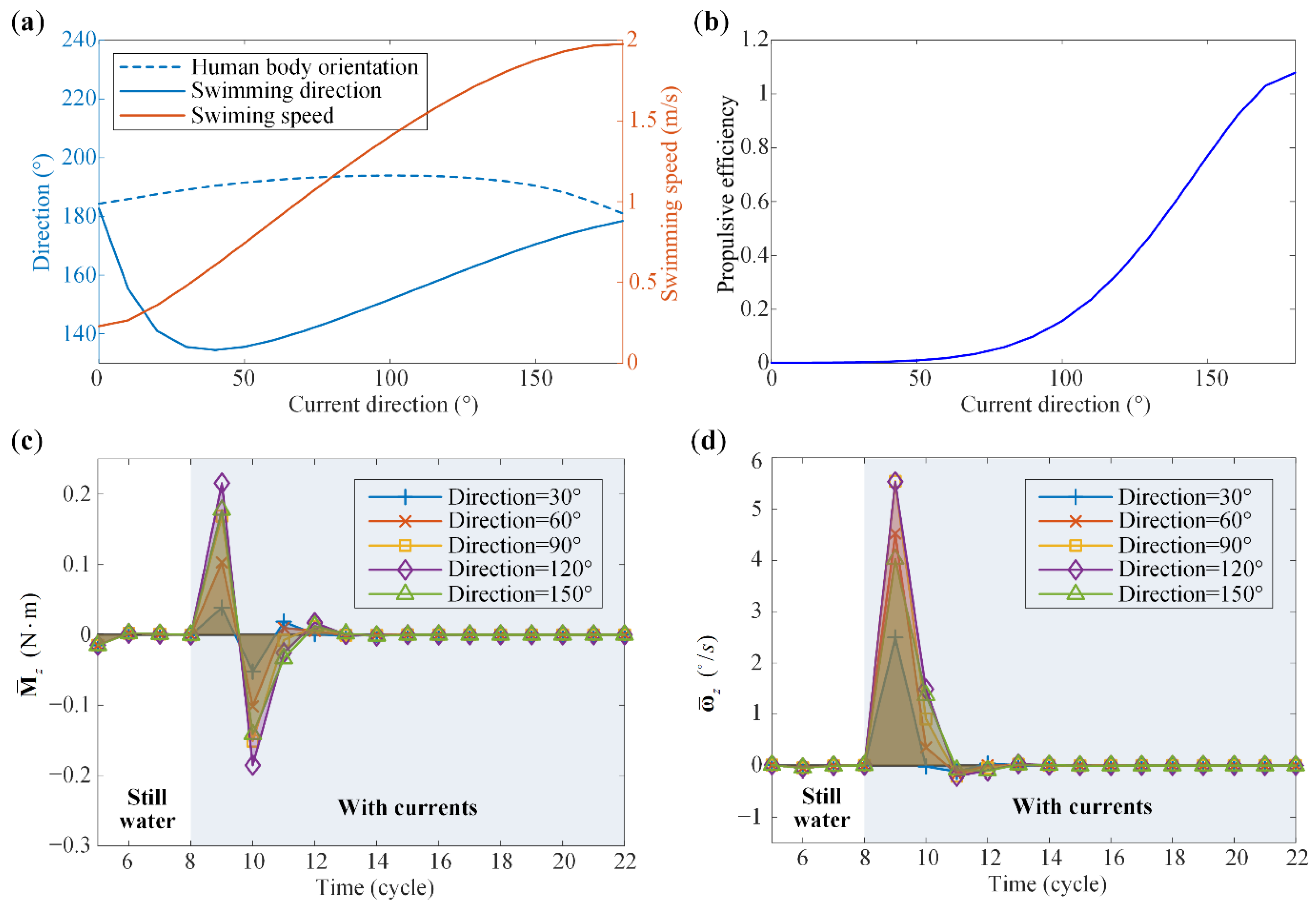
4.2. Breaststroke Swimming Performance
- For all current conditions within the range, the human trunk turns clockwise.
- With currents, the human swimming direction also turns clockwise (Figure 9b).
- The currents can be either beneficial or detrimental to the swimming speed. With a relatively large current angle and current velocity, the swimming speed can significantly exceed the speed in still water, i.e., 0.623 m/s, denoted by the black dashed line in Figure 9c.
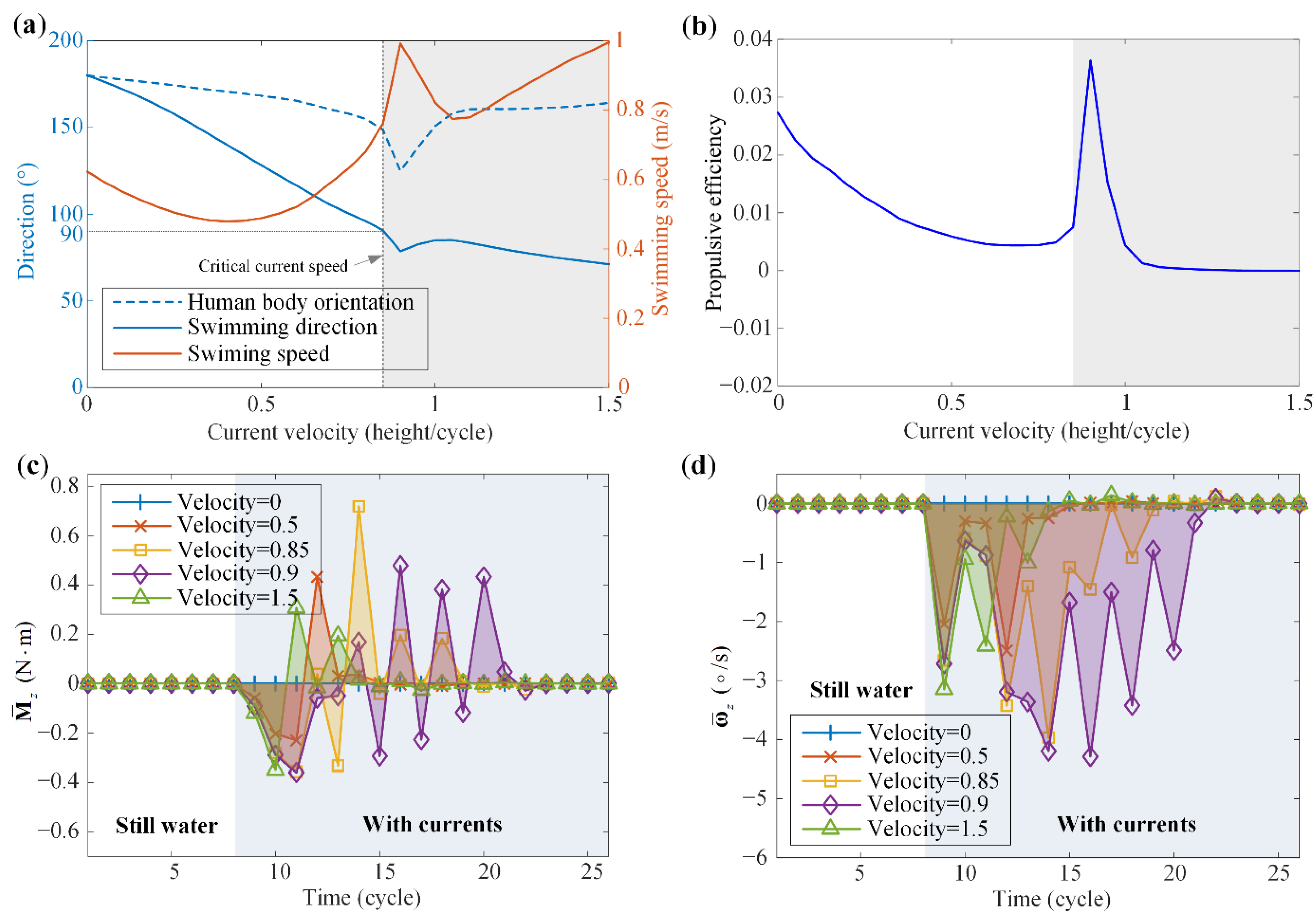
- The red curve (Figure 9) can also be identified in breaststroke swimming. This curve corresponds to the current conditions under which the human swims along the direction, and the human body’s absolute speed along the direction is zero under the action of currents. Crossing the critical curve to the right, the human body can no longer resist the drag of the currents to swim forward (i.e., to swim toward the negative direction). Around the critical curve, the human orientation angle reaches the valley, with the minimum () being achieved at the current with velocity 0.9 height/cycle (Figure 9a).
- 5.
- For a fixed current direction, the increase of current velocity will enlarge the clockwise turning angle of the human trunk (i.e., more clockwise), until the critical current velocity (i.e., the critical curve) is reached (Figure 9a). Above the critical current velocity, the clockwise turning angle of the human trunk reduces. On the other hand, the swimming direction angle always decreases (i.e., more clockwise) with the current velocity (Figure 9b). In terms of the swimming speed, when the current angle is relatively large, the swimming speed grows as the current velocity increases; when the current angle is relatively small, the swimming speed drops first and then bumps up after crossing the critical current velocity (Figure 9c).
- 6.
- 7.
- Similarly, the current could be either advantageous or disadvantageous to the propulsive efficiency (Figure 9d). For a relatively large current angle, the current is favorable to the propulsive efficiency. Note that the propulsive efficiency can also decrease to zero or negative when the counter-current velocity is too high.
5. Summary and Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
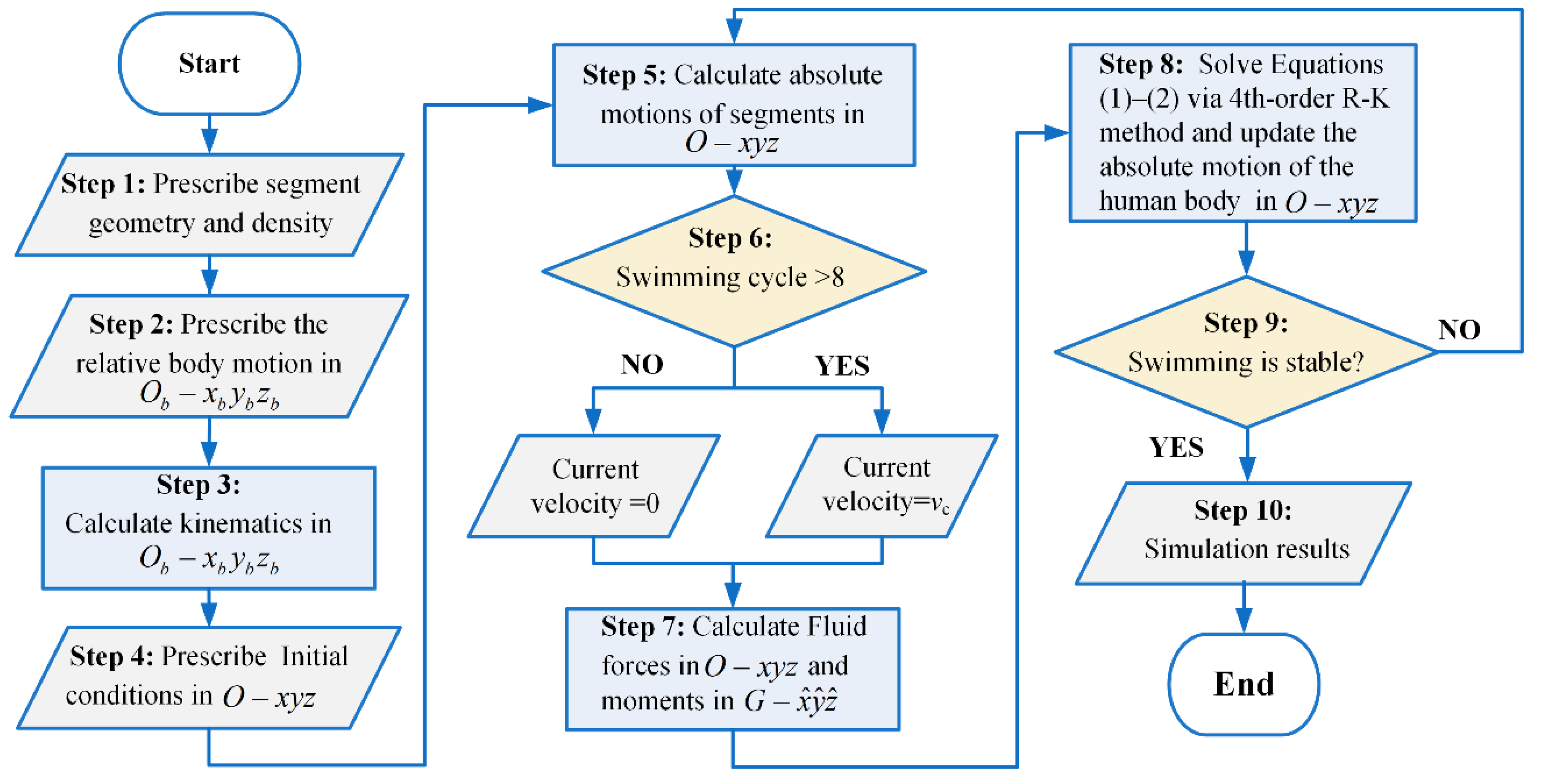
Appendix A. Major Steps of the Numerical Calculation

- Step 2: Swimming is a cyclical motion. The relative body motion in a cycle is given in the human-body coordinate system based on the recorded videos of human swimming [30].
- Step 3: Based on the given joint motions, calculate the position of the COG, the direction of the principal inertia axes, and the principal moments of inertia in a cycle in the human-body coordinate system .
- Step 4: Set initial values in the global coordinate system , including the position and velocity of the COG, the direction of the principal axes of inertia, and the angular velocities about the principal axes of inertia. This actually initializes the configuration of in the global coordinate system .
- Step 5: Calculate the position, velocity, and acceleration of each segment in the absolute coordinate system .
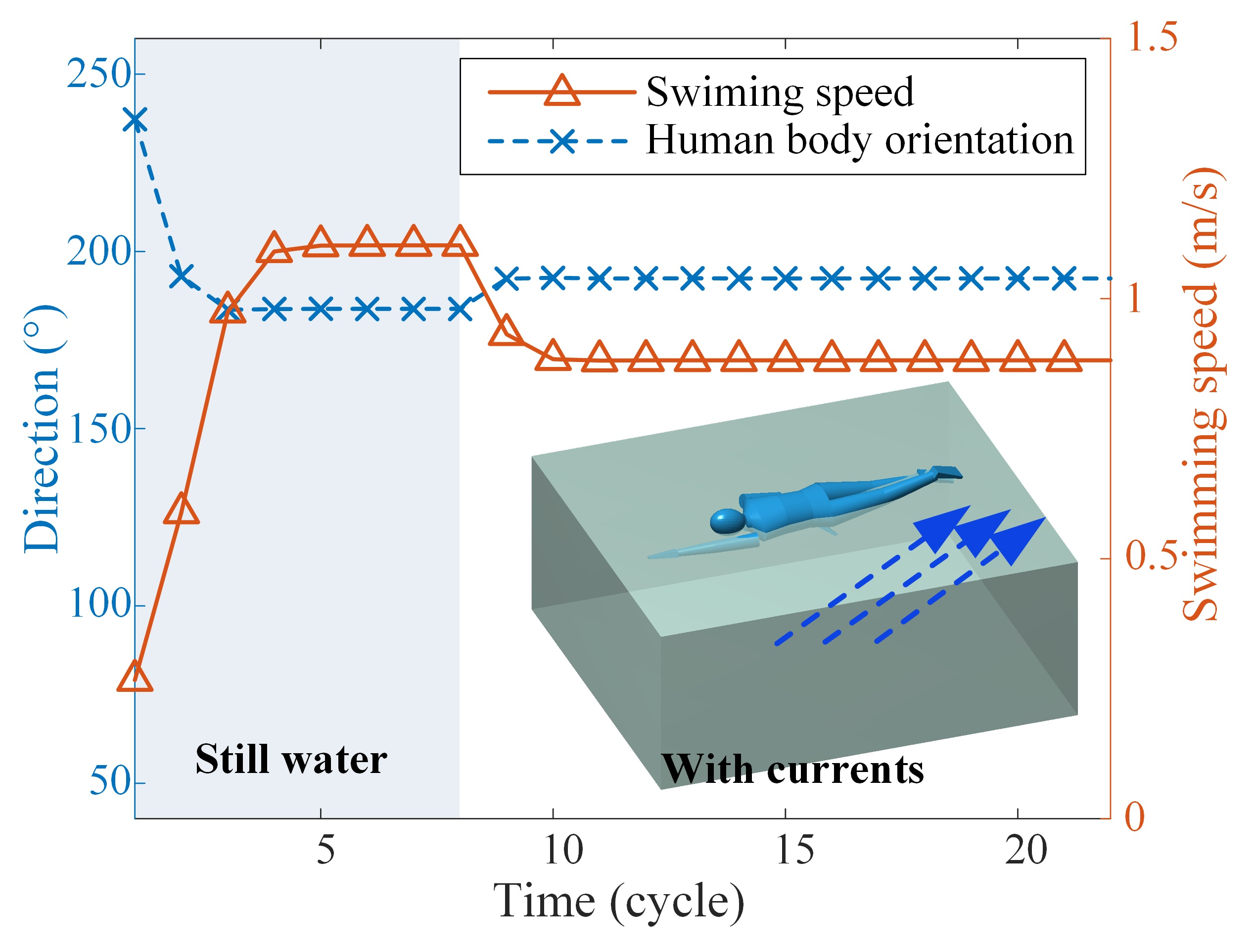
- Step 6: Assume a static water environment in the first eight cycles, and apply currents with a velocity of from the ninth cycle.
- Step 7: Calculate the fluid forces acting on each segment in and the fluid moments around the principal axes of inertia based on the fluid force model given in Equations (3)–(11).
- Step 8: Solve Equations (1) and (2) via the 4-th order Runge-Kutta method to update the values in the global coordinate system of the next time step. Specifically, the position and velocity of the COG are calculated in , and the angular velocities about the principal inertia axes are calculated in in each time step. For updating the directions of the principal axes of inertia in , a transformation matrix between the coordinate systems are employed.
References
- Wei, T.; Mark, R.; Hutchison, S. The Fluid Dynamics of Competitive Swimming. Annu. Rev. Fluid Mech. 2014, 46, 547–565. [Google Scholar] [CrossRef]
- Takagi, H.; Nakashima, M.; Sato, Y.; Matsuuchi, K.; Sanders, R.H. Numerical and experimental investigations of human swimming motions. J. Sports Sci. 2016, 34, 1564–1580. [Google Scholar] [CrossRef] [PubMed]
- Andersen, J.T.; Sanders, R.H. A systematic review of propulsion from the flutter kick–What can we learn from the dolphin kick? J. Sports Sci. 2018, 36, 2068–2075. [Google Scholar] [CrossRef]
- Cohen, R.C.Z.; Cleary, P.W.; Mason, B. Improving understanding of human swimming using smoothed particle hydrodynamics. In 6th World Congress of Biomechanics (WCB 2010), Singapore, 1–6 August 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 174–177. [Google Scholar] [CrossRef]
- Silva, A.J.; Rouboa, A.; Moreira, A.; Reis, V.M.; Alves, F.; Vilas-Boas, J.P.; Marinho, D.A. Analysis of drafting effects in swimming using computational fluid dynamics. J. Sports Sci. Med. 2008, 7, 60–66. [Google Scholar] [PubMed]
- Akiyama, K.; Nakashima, M.; Ogasawara, I. Proposal of Walking in Water for ACL Injury Rehabilitation Program by Simulation. J. Biomech. Sci. Eng. 2010, 5, 461–471. [Google Scholar] [CrossRef][Green Version]
- Wang, Q.; Zhou, Z.; Zhang, Z.; Lou, Y.; Zhou, Y.; Zhang, S.; Chen, W.; Mao, C.; Wang, Z.; Lou, W.; et al. An Underwater Lower-Extremity Soft Exoskeleton for Breaststroke Assistance. IEEE Trans. Med. Robot. Bionics 2020, 2, 447–462. [Google Scholar] [CrossRef]
- Bixler, B.S.; Schloder, M. Computational fluid dynamics: An analytical tool for the 21st century swimming scientist. J. Swim. Res. 1996, 11, 4–22. [Google Scholar]
- Bixler, B.; Riewald, S. Analysis of a swimmer’s hand and arm in steady flow conditions using computational fluid dynamics. J. Biomech. 2002, 35, 713–717. [Google Scholar] [CrossRef]
- Sato, Y.; Hino, T. CFD simulation of flows around a swimmer in a prone glide position. Jpn. J. Sci. Swim. Water Exerc. 2010, 13, 1–9. [Google Scholar] [CrossRef]
- Cohen, R.C.Z.; Cleary, P.W.; Mason, B.R.; Pease, D.L. Studying the effects of asymmetry on freestyle swimming using smoothed particle hydrodynamics. Comput. Methods Biomech. Biomed. Eng. 2020, 23, 271–284. [Google Scholar] [CrossRef]
- Cohen, R.C.Z.; Cleary, P.W.; Mason, B.R.; Pease, D.L. Forces during front crawl swimming at different stroke rates. Sports Eng. 2018, 21, 63–73. [Google Scholar] [CrossRef]
- Bixler, B.; Pease, D.; Fairhurst, F. The accuracy of computational fluid dynamics analysis of the passive drag of a male swimmer. Sports Biomech. 2007, 6, 81–98. [Google Scholar] [CrossRef] [PubMed]
- Sato, Y.; Hino, T. A computational fluid dynamics analysis of hydrodynamic force acting on a swimmer’s hand in a swimming competition. J. Sports Sci. Med. 2013, 12, 679–689. [Google Scholar]
- Harrison, S.M.; Cohen, R.C.Z.; Cleary, P.W.; Barris, S.; Rose, G. A coupled biomechanical-Smoothed Particle Hydrodynamics model for predicting the loading on the body during elite platform diving. Appl. Math. Model. 2016, 40, 3812–3831. [Google Scholar] [CrossRef]
- Cohen, R.C.Z.; Cleary, P.W.; Mason, B.R. Simulations of dolphin kick swimming using smoothed particle hydrodynamics. Hum. Mov. Sci. 2012, 31, 604–619. [Google Scholar] [CrossRef]
- Cohen, R.C.Z.; Cleary, P.W.; Mason, B.R.; Pease, D.L. The Role of the Hand during Freestyle Swimming. J. Biomech. Eng. 2015, 137, 111007. [Google Scholar] [CrossRef]
- Morais, J.E.; Sanders, R.H.; Papic, C.; Barbosa, T.M.; Marinho, D.A. The Influence of the Frontal Surface Area and Swim Velocity Variation in Front Crawl Active Drag. Med. Sci. Sports Exerc. 2020, 52, 2357–2364. [Google Scholar] [CrossRef]
- Toussaint, H.M.; Van Den Berg, C.; Beek, W.J. “Pumped-up propulsion” during front crawl swimming. Med. Sci. Sports Exerc. 2002, 34, 314–319. [Google Scholar] [CrossRef]
- Nicolas, G.; Bideau, B.; Bideau, N.; Colobert, B.; Le Guerroue, G.; Delamarche, P. A new system for analyzing swim fin propulsion based on human kinematic data. J. Biomech. 2010, 43, 1884–1889. [Google Scholar] [CrossRef]
- Kudo, S.; Yanai, T.; Wilson, B.; Takagi, H.; Vennell, R. Prediction of fluid forces acting on a hand model in unsteady flow conditions. J. Biomech. 2008, 41, 1131–1136. [Google Scholar] [CrossRef] [PubMed]
- Gourgoulis, V.; Aggeloussis, N.; Vezos, N.; Kasimatis, P.; Antoniou, P.; Mavromatis, G. Estimation of hand forces and propelling efficiency during front crawl swimming with hand paddles. J. Biomech. 2008, 41, 208–215. [Google Scholar] [CrossRef]
- Matsuuchi, K.; Miwa, T.; Nomura, T.; Sakakibara, J.; Shintani, H.; Ungerechts, B.E. Unsteady flow field around a human hand and propulsive force in swimming. J. Biomech. 2009, 42, 42–47. [Google Scholar] [CrossRef] [PubMed]
- Hochstein, S.; Blickhan, R. Vortex re-capturing and kinematics in human underwater undulatory swimming. Hum. Mov. Sci. 2011, 30, 998–1007. [Google Scholar] [CrossRef]
- Furmánek, P.; Redondo, J.M.; Carrillo, A.; Tellez, J.; Arellano, R.; Sanchez, M.A. Experiments and simulations of maximal sculling propulsion: Vorticity impulse in human biomechanics. In Proceedings of the Topical Problems of Fluid Mechanics 2016, Prague, Czech Republic, 10–12 February 2016; pp. 41–50. [Google Scholar]
- Phillips, C.W.G.; Forrester, A.I.J.; Hudson, D.A.; Turnock, S.R. Propulsive efficiency of alternative underwater flykick techniques for swimmers. Proc. Inst. Mech. Eng. Part P J. Sport. Eng. Technol. 2020, 235, 354–364. [Google Scholar] [CrossRef]
- Gojkovic, Z.; Ivancevic, T.; Jovanovic, B. Biomechanical model of swimming rehabilitation after hip and knee surgery. J. Biomech. 2019, 94, 165–169. [Google Scholar] [CrossRef] [PubMed]
- Shinohara, K. Swimmer simulation using robot manipulator dynamics under steady water. Nat. Sci. 2010, 2, 959–967. [Google Scholar] [CrossRef]
- SHINOHARA, K.; FURUKAWA, T.; YAGAWA, G. Simulation and Sub-Optimal Motion Planning of a Swimmer under Hydrodynamics. Trans. Jpn. Soc. Mech. Eng. Ser. C 2002, 68, 2643–2650. [Google Scholar] [CrossRef]
- Nakashima, M.; Satou, K.; Miura, Y. Development of Swimming Human Simulation Model Considering Rigid Body Dynamics and Unsteady Fluid Force for Whole Body. J. Fluid Sci. Technol. 2007, 2, 56–67. [Google Scholar] [CrossRef]
- Levin, S.; Albers, T.N.H.; Mitchener, K.J.; Richardson, G.; Tabellini, M.; Derviş, B.; Chaudhary, L.; Swamy, A.V.; Jedwab, R.; Johnson, N.D.; et al. Development of computer simulation software “swumsuit” to analyze mechanics of human swimming. Econ. Hist. Rev. 2019, 73, 202–246. [Google Scholar] [CrossRef]
- Akiyama, K.; Nakashima, M.; Miyoshi, T. Simulation Analysis of the Mechanical Body Load during Walking in Water. J. Environ. Eng. 2011, 6, 365–375. [Google Scholar] [CrossRef]
- Nakashima, M.; Hasegawa, T.; Matsuda, A.; Shimana, T.; Omori, K. 3D-CG Based Musculoskeletal Simulation for a Swimmer Wearing Competitive Swimwear. Procedia Eng. 2013, 60, 367–372. [Google Scholar] [CrossRef][Green Version]
- Nakashima, M.; Hatakeyama, G.; Homma, M.; Ito, K. Simulation Analysis of Lift in Synchronized Swimming. J. Aero Aqua Bio-Mech. 2013, 3, 51–56. [Google Scholar] [CrossRef]
- Akiyama, K.; Nakashima, M. Development of widely useable simulator for optimization of walking form in water. Procedia Eng. 2010, 2, 3293–3298. [Google Scholar] [CrossRef][Green Version]
- Nakashima, M.; Takahashi, R.; Kishimoto, T. Optimizing simulation of deficient limb’s strokes in freestyle for swimmers with unilateral transradial deficiency. J. Biomech. Sci. Eng. 2020, 15, 19–00467. [Google Scholar] [CrossRef]
- Nakashima, M.; Nemoto, C.; Kishimoto, T.; Terada, M.; Ikuat, Y. Optimizing simulation of arm stroke in freestyle for swimmers with hemiplegia. Mech. Eng. J. 2018, 5, 17–00377. [Google Scholar] [CrossRef]
- Baldassarre, R.; Bonifazi, M.; Zamparo, P.; Piacentini, M.F. Characteristics and challenges of open-water swimming performance: A review. Int. J. Sports Physiol. Perform. 2017, 12, 1275–1284. [Google Scholar] [CrossRef] [PubMed]
- Beaumont, F.; Taïar, R.; Polidori, G. Preliminary numerical investigation in open currents-water swimming: Pressure field in the swimmer wake. Appl. Math. Comput. 2017, 302, 48–57. [Google Scholar] [CrossRef]
- Plagenhoef, S.; Evans, F.G.; Abdelnour, T. Anatomical Data for Analyzing Human Motion University of Massachusetts -Amherst. Res. Q. Exerc. Sport 1983, 54, 169–178. [Google Scholar] [CrossRef]
- Chang, J.; Chablat, D.; Bennis, F.; Ma, L. Using 3D Scan to Determine Human Body Segment Mass in OpenSim Model. In International Conference on Digital Human Modeling and Applications in Health, Safety, Ergonomics and Risk Management; Springer: Berlin/Heidelberg, Germany, 2018; pp. 29–40. ISBN 9783319913971. [Google Scholar]
- Li, T.; Cai, W.; Zhan, J. Numerical investigation of swimmer’s gliding stage with 6-DOF movement. PLoS ONE 2017, 12, e0170894. [Google Scholar] [CrossRef]
- Zatsiorsky, V.M. (Ed.) Biomechanics in Sport; Blackwell Science Ltd.: Oxford, UK, 2000; ISBN 9780470693797. [Google Scholar]
- de Sousa, J.V.N.; de Macêdo, A.R.L.; de Amorim, W.F., Jr.; de Lima, A.G.B. Numerical Analysis of Turbulent Fluid Flow and Drag Coefficient for Optimizing the AUV Hull Design. Open J. Fluid Dyn. 2014, 4, 263–277. [Google Scholar] [CrossRef]
- Barrio-Perotti, R.; Blanco-Marigorta, E.; Argüelles-Díaz, K.; Fernández-Oro, J. Experimental evaluation of the drag coefficient of water rockets by a simple free-fall test. Eur. J. Phys. 2009, 30, 1039–1048. [Google Scholar] [CrossRef]
- Toussaint, H.M.; Beelen, A.; Rodenburg, A.; Sargeant, A.J.; de Groot, G.; Hollander, A.P.; van Ingen Schenau, G.J. Propelling efficiency of front-crawl swimming. J. Appl. Physiol. 1988, 65, 2506–2512. [Google Scholar] [CrossRef] [PubMed]
- Wilson, J.D.; Buffa, A.J.; Lou, B. College Physics Essentials; CRC Press: Boca Raton, FL, USA, 2019; ISBN 9780429323362. [Google Scholar]
- Seifert, L.; Carmigniani, R. Coordination and stroking parameters in the four swimming techniques: A narrative review. Sports Biomech. 2021. online. [Google Scholar] [CrossRef] [PubMed]
- Nakashima, M. Modeling the dynamics of human swimming. In Mining Smartness from Nature (CIMTEC 2008); Trans Tech Publications Ltd.: Freienbach, Switzerland, 2008; Volume 58, pp. 220–228. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Segment | Boundary | Segment | Boundary |
|---|---|---|---|
| Head | Top of head to lower margin of mandible | Thigh | Anterior superior spine to knee joint |
| Neck | Inferior border of mandible to upper margin clavicle | Shank | Knee joint to lower margin of medial malleolus |
| Shoulder | Upper margin clavicle to acromion | Foot | Lower margin of medial malleolus to sole |
| Upper trunk | Acromion to chest sword joint | Upper arm | Acromion to elbow joint |
| Middle trunk | Chest sword joint to upper umbilicus | Forearm | Elbow joint to wrist joint |
| Lower trunk | Upper umbilicus to anterior superior spine | Hand | Wrist joint to middle fingertip |
| Segment | Geometric Shape | Geometric Parameters (cm) | Density (kg/m3) | ||||
|---|---|---|---|---|---|---|---|
| Semi-major axis | Semi-minor axis | Axial Length | |||||
| Head | Ellipsoid | 19.65 | 17.38 | 26.55 | 1042 | ||
| Semi-axis a) | Semi-axis b) | Semi-axis c) | Semi-axis d) | Axial Length | |||
| Neck | Truncated elliptical cone | 12.59 | 14.01 | 12.78 | 11.59 | 2.59 | 1042 |
| Shoulder | 19.44 | 38.26 | 12.59 | 14.01 | 5.34 | 1042 | |
| Upper trunk | 22.52 | 29.84 | 19.44 | 38.26 | 18.10 | 700 | |
| Middle trunk | 22.37 | 28.84 | 24.52 | 29.84 | 19.52 | 1042 | |
| Lower trunk | 22.37 | 28.84 | 23.41 | 36.70 | 13.67 | 1042 | |
| Thigh | 18.41 | 18.06 | 12.26 | 11.66 | 40.64 | 1042 | |
| Shank | 12.26 | 11.66 | 8.03 | 6.77 | 39.05 | 1042 | |
| Upper arm | 10.08 | 10.08 | 8.24 | 8.24 | 30.09 | 1042 | |
| Forearm | 8.24 | 8.24 | 4.73 | 5.41 | 26.33 | 1042 | |
| Side length a) | Side length b) | Side length c) | Side length d) | Axial Length | |||
| Hand | Frustum of a pyramid | 4.64 | 10.13 | 1.40 | 5.24 | 19.80 | 1042 |
| Foot | 5.45 | 6.94 | 1.86 | 10.06 | 25.03 | 1042 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bao, Y.; Fang, H.; Xu, J. Effects of Currents on Human Freestyle and Breaststroke Swimming Analyzed by a Rigid-Body Dynamic Model. Machines 2022, 10, 17. https://doi.org/10.3390/machines10010017
Bao Y, Fang H, Xu J. Effects of Currents on Human Freestyle and Breaststroke Swimming Analyzed by a Rigid-Body Dynamic Model. Machines. 2022; 10(1):17. https://doi.org/10.3390/machines10010017
Chicago/Turabian StyleBao, Yinxiang, Hongbin Fang, and Jian Xu. 2022. "Effects of Currents on Human Freestyle and Breaststroke Swimming Analyzed by a Rigid-Body Dynamic Model" Machines 10, no. 1: 17. https://doi.org/10.3390/machines10010017
APA StyleBao, Y., Fang, H., & Xu, J. (2022). Effects of Currents on Human Freestyle and Breaststroke Swimming Analyzed by a Rigid-Body Dynamic Model. Machines, 10(1), 17. https://doi.org/10.3390/machines10010017