Abstract
A plethora of applications in non-linear analysis, including minimax problems, mathematical programming, the fixed-point problems, saddle-point problems, penalization and complementary problems, may be framed as a problem of equilibrium. Most of the methods used to solve equilibrium problems involve iterative methods, which is why the aim of this article is to establish a new iterative method by incorporating an inertial term with a subgradient extragradient method to solve the problem of equilibrium, which includes a bifunction that is strongly pseudomonotone and meets the Lipschitz-type condition in a real Hilbert space. Under certain mild conditions, a strong convergence theorem is proved, and a required sequence is generated without the information of the Lipschitz-type cost bifunction constants. Thus, the method operates with the help of a slow-converging step size sequence. In numerical analysis, we consider various equilibrium test problems to validate our proposed results.
1. Background
Assume that a bifunction satisfying the conditions for each A equilibrium problem [1,2] for f on is said to be:
where is a non-empty closed and convex subset of a Hilbert space . Next, we present the definitions of the important classification of the problems of equilibrium [1,3]. A function on for is said to be
- (i)
- strongly monotone if
- (ii)
- monotone if
- (iii)
- -strongly pseudo-monotone if
- (iv)
- pseudo-monotone ifand
- (v)
- satisfy the Lipschitz-type conditions on for such that
The above well-defined simple mathematical problem (1) includes many mathematical and applied sciences problems as a special case, consisting of the fixed point problems, vector and scalar minimization problems, problems of variational inequalities (VIP), the complementarity problems, the Nash equilibrium problems in non-cooperative games, and inverse optimization problems [1,4,5]. This problem is also seen as a problem of Ky Fan inequality based on his initial contribution [2]. Several researchers have developed and generalized numerous findings on the nature of a solution to an equilibrium problem. (e.g., see [2,4,6,7]). Due to the basic formulation of a problem (1) and its application in both the theoretical and applied sciences, it has been extensively studied in recent times by several authors [8,9] (see also [10,11,12,13,14,15,16]).
Many methods have been previously established and considered their convergence investigation to deal with the problem (1). There is an impressive number of numerical methods have been designed along with their well-defined convergence analysis and theoretical properties to solve the problem (1) in different dimensional spaces [17,18,19,20,21,22]. Regularization is one of the most significant methods to figure out various ill-posed problems in the many fields of pure and applied mathematics. The prominent aspect of the regularization method is to employ it on monotone equilibrium problems and the initial problem converts into strongly monotone equilibrium sub-problem. Therefore, each computationally efficient sub-problem is strongly monotone and a unique solution exists.
A proximal method is another approach to deal with equilibrium problems that rely on numerical minimization problems [23]. This method has also been identified as the extragradient method [24] based on the initial contribution of the Korpelevich [25] method to solve the saddle point problems. Hieu [26] established an algorithmic sequence as follows:
while meet the following conditions:
Inertial-like methods are two-step iterative methods, where the next iteration is carried out by employing the previous two iterations [27,28]. The inertial interpolation term is required to boost the sequence and help to improve the convergence rate of the iterative sequence. Such inertial methods are essentially used to speed up the iterative sequence to the appropriate solution and to improve the convergence rate. Numerical descriptions demonstrate that inertial effects also enhance the numerical performance. Such impressive attributes increase the curiosity of researchers in creating inertial methods. Recently, various inertial methods have also been established for specific types of equilibrium problems [29,30,31,32].
In this paper, we use the projection method that is simple to carry out due to its low cost and efficient numerical computations. Inspired by the works of Fan et al. [33], Thong and Hieu [34], and Censor et al. [35], we set up an accelerated extragradient-like algorithm to solve the problem (1) and other special class of equilibrium problem, such as variational inequalities. We prove a strong convergence theorem corresponding to the sequence generated to solve the problem of equilibrium under certain mild conditions. At the end, the computational tests show that the algorithm is more efficient than the current ones [26,29,36,37,38].
2. Preliminaries
Assume that a convex function and subdifferential of g on is defined as follows:
A normal cone for on is defined as follows:
Lemma 1
([39]). Assume the three sequences , and are in such that
wherewithfor eachThus, we have
- (i)
- with
- (ii)
Lemma 2
([40]). For each and , the following equality holds
Lemma 3
([41]). Let and be two sequences such that
Then,
Lemma 4
([42]). Assume that a function is subdifferentiable, convex, and lower semi-continuous on Then, is a function h minimizer if and only if while and stand for the subdifferential of h on and a normal cone of at , respectively.
Suppose that satisfies the following conditions:
- (C1)
- , for all and f is strongly pseudomonotone on
- (C2)
- f meet the Lipschitz-type condition with two constants and and
- (C3)
- is convex and sub-differentiable on for fixed each
3. Main Results
The following is the main method (Algorithm 1) in more detail.
| Algorithm 1. Modified subgradient extragradient method for equilibrium problems. |
|
Lemma 5.
Suppose that satisfies the conditions (C1)–(C3). For we have
Proof.
By value of and Lemma 4, we have
Thus, there exists and such that
Thus, the above implies that
Since , it implies that for all This gives that
By , we have
By the use of we get
By given , which implies that . From the expression (9), we obtain
Due to the Lipschitz-type continuity of a bifunction f,
By value ,
The above implies that
gives that
Substituting into the above expression,
We have the following facts:
Thus, we finally obtain
□
Theorem 1.
The sequences and generated by Algorithm 1 strongly converge to .
Proof.
By the value of , we have
From Lemma 5, we obtain
Since , thus there is in order that for each This implies for every The expression (23) for turn as
By description of , we have
By the above expression and the choice of , we have
We substitute
It follows (29) such that
We claim that
The above inequality implies that
Expression (32) implies that
Thus, we obtain a non-increasing sequence for By the value of , we have
By the value of , we have
Thus, expression (37) for is such that
Sending implies that
It continues from that
By the value of , we have
Thus, Lemma 5 implies that
The argument referred to above concludes that the sequences , , and are bounded for each the exists. It follows from (19) and (25) that we have
From Lemma 3 and (54),
This completes the proof. □
Next, we consider the application of our results to solve variational inequality problems. A function is said to be
- (G1)
- strongly pseudo-monotone over for ifand
- (G2)
- L-Lipschitz continuity on C if
Let a bifunction for all then equilibrium problem turns into problem of variational inequality with By the value of ,
Similar to above, the value of turns into
Corollary 1.
Assume that an operator satisfies Conditions(G1)–(G2). Let , and be the sequences generated as follows:
- (S1)
- Let arbitrarily.
- (S2)
- (S3)
- Computewhere If , then STOP.
- (S4)
- Determine a half space first and evaluate
- (S5)
- Computewhere and satisfies the following conditions:
- (i)
- non-decreasing sequence through for each ; and
- (ii)
- there exists thus thatand
Then, , and strongly converge to
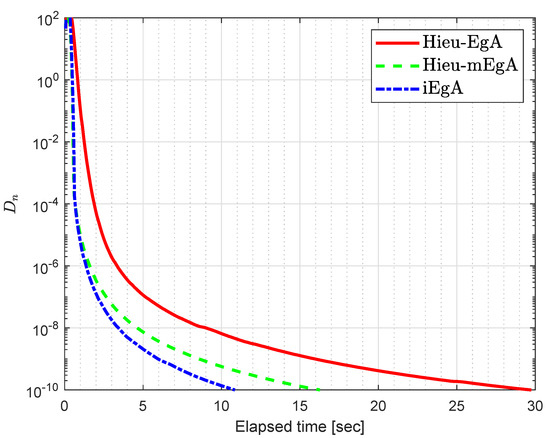
4. Numerical Illustration
Numerical findings are summarized in this section to demonstrate the effectiveness of the proposed methods. The following control parameters are used in this section.
- (1)
- For Hieu et al. [26] (Hieu-EgA), we use
- (2)
- For Hieu et al. [29] (Hieu-mEgA), we use and
- (3)
- For Algorithm 1 (iEgA), we use , and
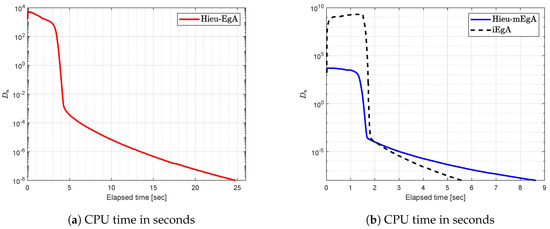
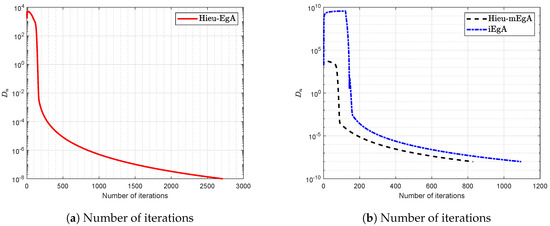
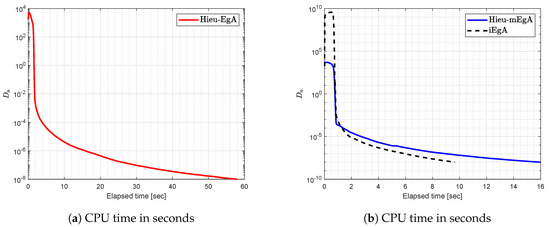
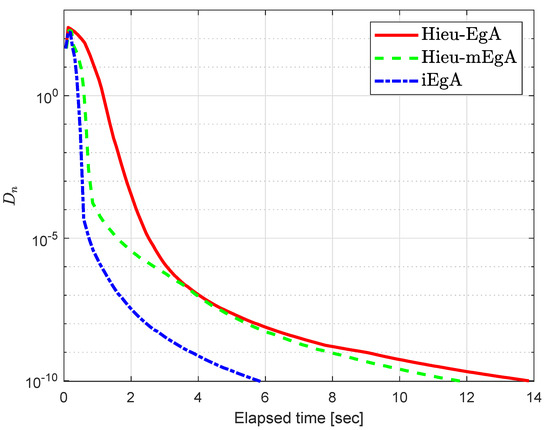
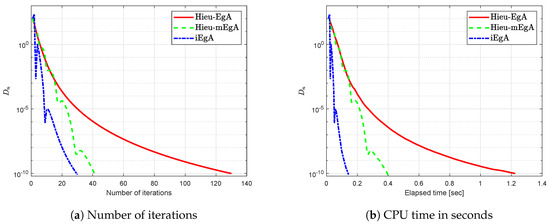
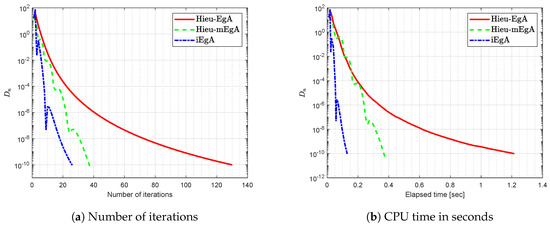
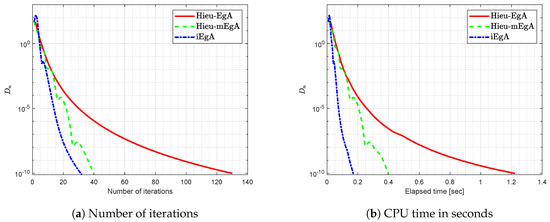
Example 1.
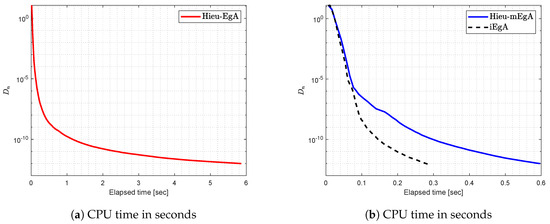
Let bifunction f have the following form
where and A and B are
and
where Lipschitz parameters [26]. The feasible set is

Figure 1.
Example 1: Numerical comparison for Algorithm 1 while
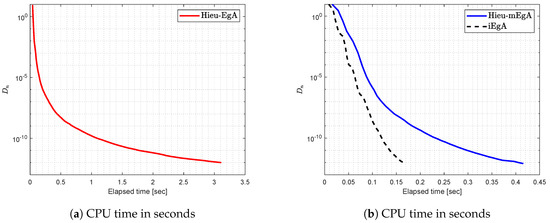
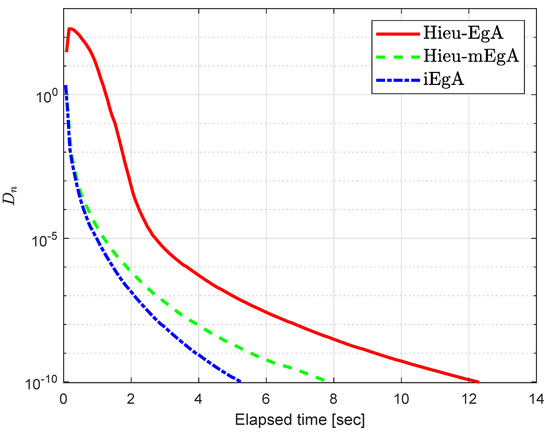
Figure 2.
Example 1: Numerical comparison for Algorithm 1 while
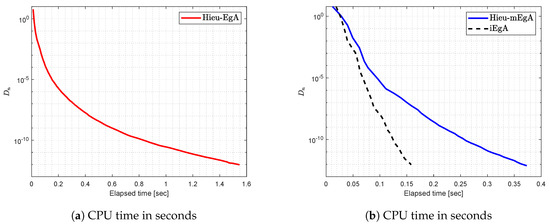
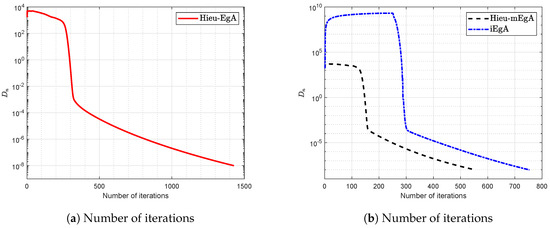
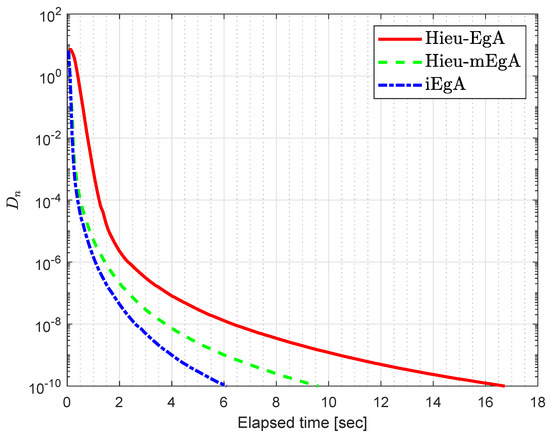
Figure 3.
Example 1: Numerical comparison for Algorithm 1 while
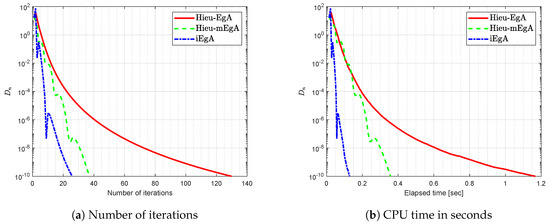
Example 2.
Let a bifunction f be defined on the convex set as
where B is a matrix, S is a skew-symmetric matrix, and D is a diagonal matrix. The set is defined by
with matrix A as and vector b as a non-negative vector. Observe that f is monotone and Lipschitz-type constants are We generate random matrices in our case [] and the numerical findings regarding Example 2 are shown in Figure 4, Figure 5, Figure 6 and Figure 7 with and
Figure 4.
Example 2: Numerical comparison for Algorithm 1 while
Figure 5.
Example 2: Numerical comparison for Algorithm 1 while
Figure 6.
Example 2: Numerical comparison for Algorithm 1 while
Figure 7.
Example 2: Numerical comparison for Algorithm 1 while
Example 3.
Let be defined by
where symmetric semi-definite matrix A and is the function depends on the proximal operator [43] through such that
The feasible set is considered as
The entries of A and c are taken as follows:
Figure 8.
Example 3: Numerical comparison for Algorithm 1 while
Figure 9.
Example 3: Numerical comparison for Algorithm 1 while
Figure 10.
Example 3: Numerical comparison for Algorithm 1 while
Figure 11.
Example 3: Numerical comparison for Algorithm 1 while
Example 4.
Suppose that is defined by
where It is easy that G is Lipschitz continuous and strongly pseudomonotone operator. Figure 12, Figure 13, Figure 14 and Figure 15 show the numerical results with and
Figure 12.
Example 4: Numerical comparison for Algorithm 1 while and
Figure 13.
Example 4: Numerical comparison for Algorithm 1 while and
Figure 14.
Example 4: Numerical comparison for Algorithm 1 while and
Figure 15.
Example 4: Numerical comparison for Algorithm 1 while and
5. Conclusions
In this paper, we set up a new method by combining an inertial term with an extragradient method for solving a family of strongly pseudomonotone equilibrium problems. The introduced method involves a sequence of diminishing and non-summable step size rule and the method operates without previous information of the Lipschitz-type constants. Four numerical examples are described to show the computational performance of the proposed method in relation to other existing methods. Numerical experiments clearly point out that the method with an inertial term performs better than those without an inertial term.
Author Contributions
Conceptualization, W.K. and K.M.; methodology, W.K. and K.M.; writing—original draft preparation, W.K. and K.M.; writing—review and editing, W.K. and K.M.; software, W.K. and K.M.; supervision, W.K.; and project administration and funding acquisition, K.M. All authors have read and agreed to the published version of the manuscript.
Funding
This project was supported by Rajamangala University of Technology Phra Nakhon (RMUTP).
Acknowledgments
The first author thanks the Rajamangala University of Technology Thanyaburi (RMUTT) (Grant No. NSF62D0604). The second author thanks the Rajamangala University of Technology Phra Nakhon (RMUTP).
Conflicts of Interest
The authors declare that they have no conflict of interest.
References
- Blum, E. From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63, 123–145. [Google Scholar]
- Fan, K. A Minimax Inequality and Applications, Inequalities III; Shisha, O., Ed.; Academic Press: New York, NY, USA, 1972. [Google Scholar]
- Bianchi, M.; Schaible, S. Generalized monotone bifunctions and equilibrium problems. J. Optim. Theory Appl. 1996, 90, 31–43. [Google Scholar] [CrossRef]
- Bigi, G.; Castellani, M.; Pappalardo, M.; Passacantando, M. Existence and solution methods for equilibria. Eur. J. Oper. Res. 2013, 227, 1–11. [Google Scholar] [CrossRef]
- Muu, L.; Oettli, W. Convergence of an adaptive penalty scheme for finding constrained equilibria. Nonlinear Anal. Theory Methods Appl. 1992, 18, 1159–1166. [Google Scholar] [CrossRef]
- Combettes, P.L.; Hirstoaga, S.A. Equilibrium programming in Hilbert spaces. J. Nonlinear Convex Anal. 2005, 6, 117–136. [Google Scholar]
- Antipin, A. Equilibrium programming: Proximal methods. Comput. Math. Math. Phys. 1997, 37, 1285–1296. [Google Scholar]
- Giannessi, F.; Maugeri, A.; Pardalos, P.M. Equilibrium Problems: Nonsmooth Optimization and Variational Inequality Models; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006; Volume 58. [Google Scholar]
- Dafermos, S. Traffic Equilibrium and Variational Inequalities. Transp. Sci. 1980, 14, 42–54. [Google Scholar] [CrossRef]
- Todorčević, V. Harmonic Quasiconformal Mappings and Hyperbolic Type Metrics; Springer International Publishing: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Cho, Y.J.; Yordsorn, P. Weak convergence of explicit extragradient algorithms for solving equilibirum problems. J. Inequalities Appl. 2019, 2019. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Je Cho, Y.; Suleiman, Y.I.; Kumam, W. Modified Popov’s explicit iterative algorithms for solving pseudomonotone equilibrium problems. Optim. Methods Softw. 2020, 1–32. [Google Scholar] [CrossRef]
- Todorčević, V. Subharmonic behavior and quasiconformal mappings. Anal. Math. Phys. 2019, 9, 1211–1225. [Google Scholar] [CrossRef]
- Koskela, P.; Manojlović, V. Quasi-Nearly Subharmonic Functions and Quasiconformal Mappings. Potential Anal. 2011, 37, 187–196. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Abubakar, A.B.; Cho, Y.J. The extragradient algorithm with inertial effects extended to equilibrium problems. Comput. Appl. Math. 2020, 39. [Google Scholar] [CrossRef]
- Hammad, H.A.; ur Rehman, H.; la Sen, M.D. Advanced Algorithms and Common Solutions to Variational Inequalities. Symmetry 2020, 12, 1198. [Google Scholar] [CrossRef]
- Hieu, D.V.; Quy, P.K.; Vy, L.V. Explicit iterative algorithms for solving equilibrium problems. Calcolo 2019, 56. [Google Scholar] [CrossRef]
- Hieu, D.V. New inertial algorithm for a class of equilibrium problems. Numer. Algorithms 2018, 80, 1413–1436. [Google Scholar] [CrossRef]
- Anh, P.K.; Hai, T.N. Novel self-adaptive algorithms for non-Lipschitz equilibrium problems with applications. J. Glob. Optim. 2018, 73, 637–657. [Google Scholar] [CrossRef]
- Anh, P.N.; Anh, T.T.H.; Hien, N.D. Modified basic projection methods for a class of equilibrium problems. Numer. Algorithms 2017, 79, 139–152. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Kumam, W.; Shutaywi, M.; Jirakitpuwapat, W. The Inertial Sub-Gradient Extra-Gradient Method for a Class of Pseudo-Monotone Equilibrium Problems. Symmetry 2020, 12, 463. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Argyros, I.K.; Deebani, W.; Kumam, W. Inertial Extra-Gradient Method for Solving a Family of Strongly Pseudomonotone Equilibrium Problems in Real Hilbert Spaces with Application in Variational Inequality Problem. Symmetry 2020, 12, 503. [Google Scholar] [CrossRef]
- Flåm, S.D.; Antipin, A.S. Equilibrium programming using proximal-like algorithms. Math. Program. 1996, 78, 29–41. [Google Scholar] [CrossRef]
- Tran, D.Q.; Dung, M.L.; Nguyen, V.H. Extragradient algorithms extended to equilibrium problems. Optimization 2008, 57, 749–776. [Google Scholar] [CrossRef]
- Korpelevich, G. The extragradient method for finding saddle points and other problems. Matecon 1976, 12, 747–756. [Google Scholar]
- Hieu, D.V. New extragradient method for a class of equilibrium problems in Hilbert spaces. Appl. Anal. 2017, 97, 811–824. [Google Scholar] [CrossRef]
- Polyak, B. Some methods of speeding up the convergence of iteration methods. USSR Comput. Math. Math. Phys. 1964, 4, 1–17. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A Fast Iterative Shrinkage-Thresholding Algorithm for Linear Inverse Problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Hieu, D.V.; Cho, Y.J.; bin Xiao, Y. Modified extragradient algorithms for solving equilibrium problems. Optimization 2018, 67, 2003–2029. [Google Scholar] [CrossRef]
- Rehman, H.U.; Kumam, P.; Dong, Q.L.; Peng, Y.; Deebani, W. A new Popov’s subgradient extragradient method for two classes of equilibrium programming in a real Hilbert space. Optimization 2020, 1–36. [Google Scholar] [CrossRef]
- Yordsorn, P.; Kumam, P.; ur Rehman, H.; Ibrahim, A.H. A Weak Convergence Self-Adaptive Method for Solving Pseudomonotone Equilibrium Problems in a Real Hilbert Space. Mathematics 2020, 8, 1165. [Google Scholar] [CrossRef]
- Yordsorn, P.; Kumam, P.; Rehman, H.U. Modified two-step extragradient method for solving the pseudomonotone equilibrium programming in a real Hilbert space. Carpathian J. Math. 2020, 36, 313–330. [Google Scholar]
- Fan, J.; Liu, L.; Qin, X. A subgradient extragradient algorithm with inertial effects for solving strongly pseudomonotone variational inequalities. Optimization 2019, 1–17. [Google Scholar] [CrossRef]
- Thong, D.V.; Hieu, D.V. Inertial extragradient algorithms for strongly pseudomonotone variational inequalities. J. Comput. Appl. Math. 2018, 341, 80–98. [Google Scholar] [CrossRef]
- Censor, Y.; Gibali, A.; Reich, S. The Subgradient Extragradient Method for Solving Variational Inequalities in Hilbert Space. J. Optim. Theory Appl. 2010, 148, 318–335. [Google Scholar] [CrossRef] [PubMed]
- ur Rehman, H.; Kumam, P.; Argyros, I.K.; Alreshidi, N.A.; Kumam, W.; Jirakitpuwapat, W. A Self-Adaptive Extra-Gradient Methods for a Family of Pseudomonotone Equilibrium Programming with Application in Different Classes of Variational Inequality Problems. Symmetry 2020, 12, 523. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Argyros, I.K.; Shutaywi, M.; Shah, Z. Optimization Based Methods for Solving the Equilibrium Problems with Applications in Variational Inequality Problems and Solution of Nash Equilibrium Models. Mathematics 2020, 8, 822. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Shutaywi, M.; Alreshidi, N.A.; Kumam, W. Inertial Optimization Based Two-Step Methods for Solving Equilibrium Problems with Applications in Variational Inequality Problems and Growth Control Equilibrium Models. Energies 2020, 13, 3292. [Google Scholar] [CrossRef]
- Attouch, F.A.H. An Inertial Proximal Method for Maximal Monotone Operators via Discretization of a Nonlinear Oscillator with Damping. Set-Valued Var. Anal. 2001, 9, 3–11. [Google Scholar] [CrossRef]
- Heinz, H.; Bauschke, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces, 2nd ed.; CMS Books in Mathematics; Springer International Publishing: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Ofoedu, E. Strong convergence theorem for uniformly L-Lipschitzian asymptotically pseudocontractive mapping in real Banach space. J. Math. Anal. Appl. 2006, 321, 722–728. [Google Scholar] [CrossRef]
- Tiel, J.V. Convex Analysis: An Introductory Text, 1st ed.; Wiley: New York, NY, USA, 1984. [Google Scholar]
- Kreyszig, E. Introductory Functional Analysis with Applications, 1st ed.; Wiley: New York, NY, USA, 1978. [Google Scholar]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).