
Overlapping Schwarz Preconditioners for Isogeometric Collocation Methods Based on Generalized B-Splines

Abstract
1. Introduction
2. Generalized B-Splines (GB-Splines)
2.1. Generalized Polynomial Spaces
2.2. Univariate GB-Splines
- -
- standard polynomial B-splines when U and V are polynomials (namely, and ).
- -
- exponential GB-splines when and with .
- -
- trigonometric GB-splines when and with .
- Positivity: For all , it holds that
- Compact support: is positive only within the interval , i.e.,
- Local partition of unity: On each subinterval , the sum of the basis functions forms a partition of unity:
- Local linear independence: is locally linearly independent on .
- Smoothness: Each GB-spline has continuous derivatives up to order at , where denotes the multiplicity of knot .
- Differentiation: The derivative of a GB-spline can be represented in terms of two consecutive GB-splines of a lower degree:where is defined in (10).
2.3. Multivariate GB-Splines in IGA
- ·
- consisting of polynomial degrees,
- ·
- ,
- ·
- consisting of knot vectors,
- ·
- and ,
- ·
- .
- The space in the parametric domain is defined by
- The space in the physical domain is given by
2.4. Isogeometric Collocation
3. The Overlapping Schwarz Preconditioners
3.1. Subdomains and Subspace Decompositions
3.2. Matrix Form of the Preconditioner
4. Numerical Results
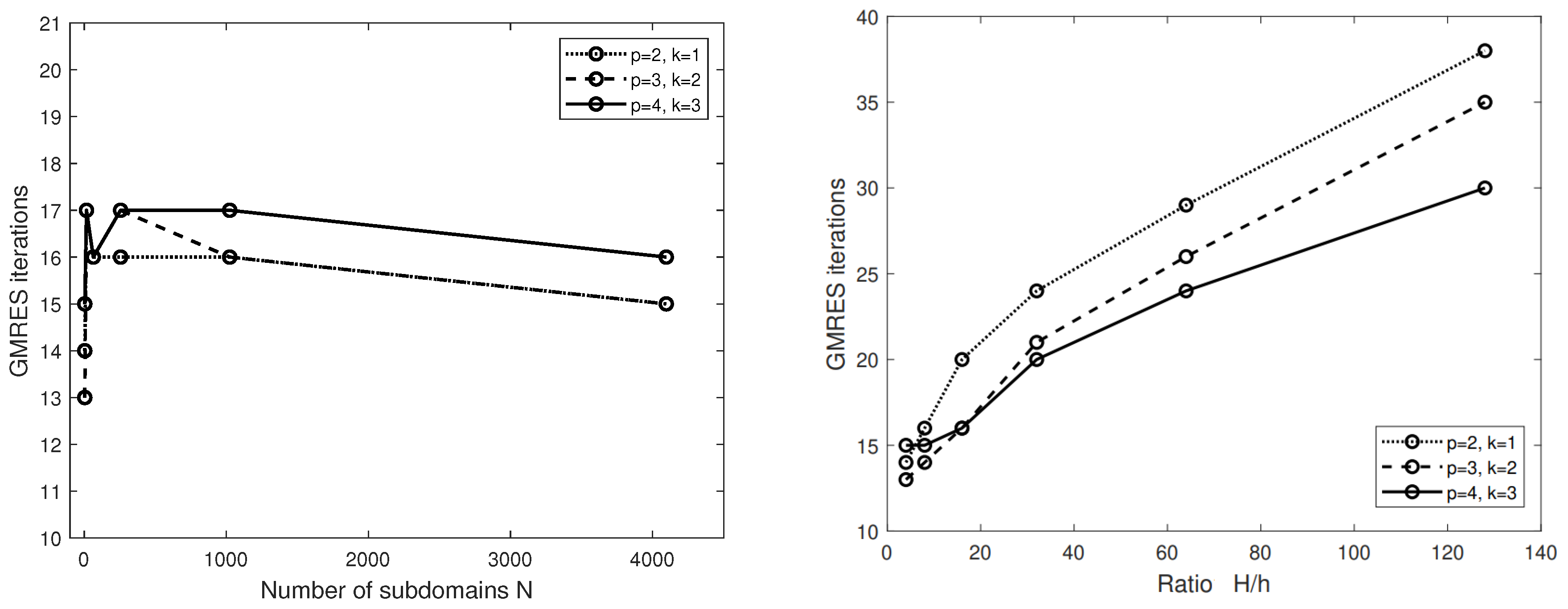
4.1. Two Spatial Dimension Tests: OAS Scalability in N and Optimality in H/h
4.2. OAS Robustness with Respect to 2D Domain Deformations
4.3. Three Spatial Dimensional (3D) Tests: OAS Scalability in N
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hughes, T.J.R.; Cottrell, J.A.; Bazilevs, Y. Isogeometric analysis: CAD, finite elements, NURBS, exact geometry, and mesh refinement. Comp. Meth. Appl. Mech. Engrg. 2005, 194, 4135–4195. [Google Scholar] [CrossRef]
- Cottrell, J.A.; Hughes, T.J.R.; Bazilevs, Y. Isogeometric Analysis. Towards integration of CAD and FEA; Wiley: Hoboken, NJ, USA, 2009. [Google Scholar]
- Bazilevs, Y.; da Veiga, L.B.; Cottrell, J.A.; Hughes, T.J.R.; Sangalli, G. Isogeometric analysis: Approximation, stability and error estimates for h-refined meshes. Math. Mod. Meth. Appl. Sci. 2006, 16, 1–60. [Google Scholar] [CrossRef]
- da Veiga, L.B.; Buffa, A.; Sangalli, G.; Vazquez, R. Mathematical analysis of variational isogeometric methods. Acta Numer. 2014, 23, 157–287. [Google Scholar] [CrossRef]
- Costantini, P.; Manni, C.; Pelosi, F.; Sampoli, M.L. Quasi-interpolation in isogeometric analysis based on generalized B-splines. Comput. Aided Geom. Design 2010, 27, 656–668. [Google Scholar] [CrossRef]
- Kvasov, B.I.; Sattayatham, P. GB-splines of arbitrary order. J. Comp. Appl. Math. 1999, 104, 63–88. [Google Scholar]
- Manni, C.; Pelosi, F.; Sampoli, M.L. Generalized B-splines as a tool in isogeometric analysis. Comput. Methods Appl. Mech. Engrg. 2011, 200, 867–881. [Google Scholar] [CrossRef]
- Costantini, P.; Lyche, T.; Manni, C. On a class of weak Tchebycheff systems. Numer. Math. 2005, 101, 333–354. [Google Scholar] [CrossRef]
- Lyche, T.; Manni, C.; Speleers, H. Tchebycheffian B-splines revisited: An introductory exposition. In Advanced Methods for Geometric Modeling and Numerical Simulation; Springer INdAM Series; Springer: Berlin/Heidelberg, Germany, 2019; Volume 35, pp. 179–216. [Google Scholar]
- Mazure, M.-L. On a general new class of quasi-Chebyshevian splines. Numer. Algorithms 2011, 58, 399–438. [Google Scholar] [CrossRef]
- Mazure, M.-L. How to build all Chebyshevian spline spaces good for Geometric Design. Numer. Math. 2011, 119, 517–556. [Google Scholar] [CrossRef]
- Raval, K.; Manni, C.; Speleers, H. Tchebycheffian B-splines in isogeometric Galerkin methods. (English summary). Comput. Methods Appl. Mech. Engrg. 2023, 403, 115648. [Google Scholar] [CrossRef]
- Buffa, A.; Sangalli, G.; Vàzquez, R. Isogeometric analysis in electromagnetics: B-spline approximation. Comput. Methods Appl. Mech. Engrg. 2010, 199, 1143–1152. [Google Scholar] [CrossRef]
- Buffa, A.; Sangalli, G.; Vázquez, R. Isogeometric methods for computational electromagnetics: B-spline and T-spline discretizations. J. Comput. Phys. 2014, 257, 1291–1320. [Google Scholar] [CrossRef]
- Manni, C.; Pelosi, F.; Sampoli, M.L. Isogeometric analysis in advection-diffusion problems: Tension splines approximation. J. Comput. Appl. Math. 2011, 236, 511–528. [Google Scholar] [CrossRef]
- Manni, C.; Pelosi, F.; Speleers, H. Local hierarchical h-refinements in IgA based on generalized B-splines. In Mathematical Methods for Curves and Surfaces 2012; Floater, M., Ed.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2014; Volume 8177, pp. 341–363. [Google Scholar]
- Manni, C.; Roman, F.; Speleers, H. Generalized B-splines in isogeometric analysis. In Approximation Theory XV: San Antonio 2016; Springer Proceedings in Mathematics & Statistics; Springer: Berlin/Heidelberg, Germany, 2017; Volume 201, pp. 239–267. [Google Scholar]
- Auricchio, F.; da Veiga, L.B.; Hughes, T.J.R.; Reali, A.; Sangalli, G. Isogeometric Collocation Methods. Math. Mod. Meth. Appl. Sci. 2010, 20, 2075–2107. [Google Scholar] [CrossRef]
- Auricchio, F.; da Veiga, L.B.; Hughes, T.J.R.; Reali, A.; Sangalli, G. Isogeometric collocation for elastostatics and explicit dynamics. Comp. Meth. Appl. Mech. Engrg. 2012, 249–252, 2–14. [Google Scholar] [CrossRef]
- Schillinger, D.; Evans, J.A.; Reali, A.; Scott, M.A.; Hughes, T.J.R. Isogeometric Collocation: Cost comparison with Galerkin methods and extension to adaptive hierarchical NURBS discretizations. Comp. Meth. Appl. Mech. Engrg. 2013, 267, 170–232. [Google Scholar] [CrossRef]
- Auricchio, F.; da Veiga, L.B.; Kiendl, J.; Lovadina, C.; Reali, A. Locking-free isogeometric collocation methods for spatial Timoshenko rods. Comp. Meth. Appl. Mech. Engrg. 2013, 263, 113–126. [Google Scholar] [CrossRef]
- da Veiga, L.B.; Lovadina, C.; Reali, A. Avoiding shear locking for the Timoshenko beam problem via isogeometric collocation methods. Comp. Meth. Appl. Mech. Engrg. 2012, 241–244, 8–51. [Google Scholar]
- Gomez, H.; Reali, A.; Sangalli, G. Accurate, efficient, and (iso)geometrically flexible collocation methods for phase-field models. J. Comput. Phys. 2014, 262, 153–171. [Google Scholar] [CrossRef]
- Cho, D. Overlapping Schwarz methods for isogeometric analysis based on generalized B-splines. Comput. Methods Appl. Mech. Engrg. 2020, 372, 113430. [Google Scholar] [CrossRef]
- Trefethen, L.N.; Bau, D. Numerical Linear Algebra; SIAM: University City, PA, USA, 1996. [Google Scholar]
- da Veiga, L.B.; Cho, D.; Pavarino, L.F.; Scacchi, S. Overlapping Schwarz methods for Isogeometric Analysis. SIAM J. Numer. Anal. 2012, 50, 1394–1416. [Google Scholar] [CrossRef]
- da Veiga, L.B.; Cho, D.; Pavarino, L.F.; Scacchi, S. Isogeometric Schwarz preconditioners for linear elasticity systems. Comp. Meth. Appl. Mech. Engrg. 2013, 253, 439–454. [Google Scholar] [CrossRef]
- da Veiga, L.B.; Cho, D.; Pavarino, L.F.; Scacchi, S. Overlapping Schwarz preconditioners for isogeometric collocation methods. Comp. Meth. Appl. Mech. Engrg. 2014, 278, 239–253. [Google Scholar] [CrossRef]
- Cho, D. Isogeometric Schwarz Preconditioners with Generalized B-Splines for the Biharmonic Problem. Axioms 2023, 12, 452. [Google Scholar] [CrossRef]
- Cho, D.; Pavarino, L.F.; Scacchi, S. Isogeometric Schwarz preconditioners for the biharmonic problem. Electron. Trans. Numer. Anal. 2018, 49, 81–102. [Google Scholar] [CrossRef]
- Hofer, C. Analysis of discontinuous Galerkin dual-primal isogeometric tearing and interconnecting methods. Math. Mod. Meth. Appl. Sci. 2018, 28, 131–158. [Google Scholar] [CrossRef]
- Hofer, C. Parallelization of continuous and discontinuous Galerkin dual-primal isogeometric tearing and interconnecting methods. Comput. Math. Appl. 2017, 74, 1607–1625. [Google Scholar] [CrossRef]
- Hofer, C.; Langer, U. Dual-primal isogeometric tearing and interconnecting solvers for multipatch dG-IgA equations. Comput. Methods Appl. Mech. Eng. 2017, 316, 2–21. [Google Scholar] [CrossRef]
- Hofer, C.; Langer, U.; Takacs, S. Inexact dual-primal isogeometric tearing and interconnecting methods. In International Conference on Domain Decomposition Methods; Springer: Cham, Switzerland, 2017; pp. 393–403. [Google Scholar]
- Kleiss, S.K.; Pechstein, C.; Jüttler, B.; Tomar, S. IETI - Isogeometric Tearing and Interconnecting. Comp. Meth. Appl. Mech. Engrg. 2012, 247–248, 201–215. [Google Scholar] [CrossRef]
- Pavarino, L.F.; Scacchi, S. Isogeometric block FETI-DP preconditioners for the Stokes and mixed linear elasticity systems. Comp. Meth. Appl. Mech. Engrg. 2016, 310, 694–710. [Google Scholar] [CrossRef]
- da Veiga, L.B.; Cho, D.; Pavarino, L.F.; Scacchi, S. BDDC preconditioners for Isogeometric Analysis. Math. Mod. Meth. Appl. Sci. 2013, 23, 1099–1142. [Google Scholar] [CrossRef]
- da Veiga, L.B.; Pavarino, L.F.; Scacchi, S.; Widlund, O.B.; Zampini, S. Isogeometric BDDC preconditioners with deluxe scaling. SIAM J. Sci. Comp. 2014, 36, A1118–A1139. [Google Scholar] [CrossRef]
- da Veiga, L.B.; Pavarino, L.F.; Scacchi, S.; Widlund, O.B.; Zampini, S. Adaptive selection of primal constraints for isogeometric BDDC deluxe preconditioners. SIAM J. Sci. Comp. 2017, 39, A281–A302. [Google Scholar] [CrossRef]
- Pavarino, L.F.; Scacchi, S.; Widlund, O.B.; Zampini, S. Isogeometric BDDC deluxe preconditioners for linear elasticity. Math. Models Methods Appl. Sci. 2018, 28, 1337–1370. [Google Scholar] [CrossRef]
- Widlund, O.B.; Scacchi, S.; Pavarino, L.F. BDDC deluxe algorithms for two-dimensional H(curl) isogeometric analysis. SIAM J. Sci. Comput. 2022, 44, A2349–A2369. [Google Scholar] [CrossRef]
- Buffa, A.; Harbrecht, H.; Kunoth, A.; Sangalli, G. BPX-preconditioning for isogeometric analysis. Comp. Meth. Appl. Mech. Engrg. 2013, 265, 63–70. [Google Scholar] [CrossRef]
- Donatelli, M.; Garoni, C.; Manni, C.; Serra-Capizzano, S.; Speleers, H. Robust and optimal multi-iterative techniques for IgA Galerkin linear systems. Comp. Meth. Appl. Mech. Engrg. 2015, 284, 230–264. [Google Scholar] [CrossRef]
- Gahalaut, K.; Kraus, J.; Tomar, S. Multigrid Methods for Isogeometric Discretization. Comp. Meth. Appl. Mech. Engrg. 2013, 253, 413–425. [Google Scholar] [CrossRef]
- Gahalaut, K.P.S.; Tomar, S.K.; Kraus, J.K. Algebraic multilevel preconditioning in isogeometric analysis: Construction and numerical studies. Comp. Meth. Appl. Mech. Engrg. 2013, 266, 40–56. [Google Scholar] [CrossRef]
- Hofreither, C.; Takacs, S. Robust multigrid for isogeometric analysis based on stable splittings of spline spaces. SIAM J. Numer. Anal. 2017, 55, 2004. [Google Scholar] [CrossRef]
- Takacs, S. Robust approximation error estimates and multigrid solvers for isogeometric multi-patch discretizations. Math. Models Methods Appl. Sci. 2018, 28, 1899–1928. [Google Scholar] [CrossRef]
- Cho, D. Optimal multilevel preconditioners for isogeometric collocation methods. Math. Comput. Simul. 2020, 168, 76–89. [Google Scholar] [CrossRef]
- Cho, D.; Pavarino, L.F.; Scacchi, S. Overlapping additive Schwarz preconditioners for isogeometric collocation discretizations of linear elasticity. Comput. Math. Appl. 2021, 93, 66–77. [Google Scholar] [CrossRef]
- de Boor, C. A Practical Guide to Splines; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Lyche, L. A recurrence relation for Chebyshevian B-splines. Constr. Approx. 1985, 1, 155–173. [Google Scholar] [CrossRef]
- Wang, G.; Fang, M. Unified and extended form of three types of splines. J. Comp. Appl. Math. 2008, 216, 498–508. [Google Scholar] [CrossRef]
- Manni, C.; Reali, A.; Speleers, H. Isogeometric collocation methods with generalized B-splines. Comput. Math. Appl. 2015, 70, 1659–1675. [Google Scholar] [CrossRef]
- Vázquez, R. A new design for the implementation of isogeometric analysis in Octave and Matlab: GeoPDEs 3.0. Comput. Math. Appl. 2016, 72, 523–554. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
| IGA Collocation Stiffness Matrices | |||
|---|---|---|---|
| h | p = 2 | p = 3 | p = 4 |
| 1/8 | 14.58 | 21.98 | 53.26 |
| 1/16 | 53.51 | 84.02 | 163.42 |
| 1/32 | 209.14 | 340.56 | 543.25 |
| 1/64 | 831.67 | 1383.08 | 2297.88 |
| 1/128 | 3321.74 | 5395.86 | 9836.58 |
| 1/256 | 13,282.02 | 21,281.60 | 37,613.05 |
| , 2D unit square domain | ||||||||||||
| = 8 | = 16 | = 32 | = 64 | = 128 | = 256 | |||||||
| NP | 18 | 35 | 69 | 169 | 467 | 1198 | ||||||
| N | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) |
| 12 | 14 | 15 | 16 | 19 | 20 | 26 | 24 | 33 | 29 | 45 | 38 | |
| 18 | 17 | 25 | 20 | 34 | 23 | 45 | 29 | 62 | 37 | |||
| 30 | 16 | 43 | 21 | 62 | 26 | 85 | 34 | |||||
| 55 | 16 | 81 | 20 | 122 | 27 | |||||||
| 109 | 16 | 209 | 19 | |||||||||
| 324 | 15 | |||||||||||
| , 2D unit square domain | ||||||||||||
| NP | 22 | 42 | 84 | 213 | 601 | 1720 | ||||||
| N | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) |
| 12 | 13 | 17 | 14 | 21 | 16 | 29 | 21 | 36 | 26 | 52 | 35 | |
| 21 | 17 | 29 | 18 | 40 | 22 | 54 | 28 | 75 | 36 | |||
| 36 | 16 | 53 | 19 | 75 | 23 | 102 | 29 | |||||
| 69 | 17 | 100 | 18 | 183 | 23 | |||||||
| 165 | 16 | 291 | 18 | |||||||||
| 426 | 15 | |||||||||||
| , 2D unit square domain | ||||||||||||
| NP | 33 | 55 | 108 | 329 | 744 | 2447 | ||||||
| N | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) |
| 12 | 15 | 15 | 15 | 19 | 16 | 25 | 20 | 32 | 24 | 43 | 28 | |
| 17 | 17 | 24 | 17 | 33 | 19 | 44 | 24 | 60 | 30 | |||
| 28 | 16 | 41 | 19 | 58 | 23 | 82 | 28 | |||||
| 53 | 17 | 75 | 19 | 114 | 25 | |||||||
| 98 | 17 | 192 | 19 | |||||||||
| 304 | 16 | |||||||||||
| , a quarter of an annulus | ||||||||||
| = 8 | = 16 | = 32 | = 64 | = 128 | ||||||
| NP | 31 | 61 | 129 | 326 | 733 | |||||
| N | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) |
| 14 | 16 | 19 | 18 | 25 | 22 | 33 | 28 | 45 | 39 | |
| 23 | 19 | 34 | 24 | 45 | 31 | 62 | 42 | |||
| 43 | 21 | 61 | 29 | 86 | 39 | |||||
| 81 | 23 | 124 | 33 | |||||||
| 196 | 24 | |||||||||
| , a quarter of an annulus | ||||||||||
| NP | 38 | 69 | 168 | 424 | 909 | |||||
| N | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) |
| 16 | 15 | 21 | 18 | 28 | 22 | 37 | 28 | 51 | 37 | |
| 29 | 22 | 39 | 27 | 54 | 34 | 73 | 44 | |||
| 52 | 26 | 76 | 33 | 109 | 42 | |||||
| 104 | 30 | 179 | 37 | |||||||
| 244 | 31 | |||||||||
| , a quarter of an annulus | ||||||||||
| NP | 44 | 75 | 212 | 506 | 1226 | |||||
| N | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) | OAS (1) | OAS (2) |
| 14 | 17 | 18 | 17 | 24 | 20 | 32 | 24 | 42 | 31 | |
| 21 | 19 | 32 | 22 | 43 | 27 | 60 | 35 | |||
| 41 | 21 | 59 | 27 | 83 | 34 | |||||
| 78 | 22 | 115 | 31 | |||||||
| 191 | 23 | |||||||||
| 2D Domain Deformation Test | |||
|---|---|---|---|
| Domain | NP | OAS (1) | OAS (2) |
| A | 429 | 62 | 42 |
| B | 489 | 66 | 50 |
| C | 733 | 68 | 58 |
| D | 1268 | 74 | 75 |
| N | NP | OAS (1) | OAS (2) |
|---|---|---|---|
| 22 | 17 | 18 | |
| 33 | 24 | 21 | |
| 43 | 29 | 23 | |
| 53 | 33 | 23 | |
| 61 | 38 | 23 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, D. Overlapping Schwarz Preconditioners for Isogeometric Collocation Methods Based on Generalized B-Splines. Axioms 2025, 14, 397. https://doi.org/10.3390/axioms14060397
Cho D. Overlapping Schwarz Preconditioners for Isogeometric Collocation Methods Based on Generalized B-Splines. Axioms. 2025; 14(6):397. https://doi.org/10.3390/axioms14060397
Chicago/Turabian StyleCho, Durkbin. 2025. "Overlapping Schwarz Preconditioners for Isogeometric Collocation Methods Based on Generalized B-Splines" Axioms 14, no. 6: 397. https://doi.org/10.3390/axioms14060397
APA StyleCho, D. (2025). Overlapping Schwarz Preconditioners for Isogeometric Collocation Methods Based on Generalized B-Splines. Axioms, 14(6), 397. https://doi.org/10.3390/axioms14060397