Abstract
This study proposes a learning path recommendation method based on fuzzy competence space theory. It is developed within the theoretical framework of knowledge space theory and fuzzy set theory, aiming to address the progressive nature of learners’ skill acquisition. The proposed method ensures that a learner can improve their knowledge state by increasing only one proficiency level of a skill at a time, thereby closely reflecting the incremental characteristics of real-world learning processes. Based on fuzzy skill mappings, this work systematically defines fuzzy competence states, fuzzy competence structures, and consistent fuzzy competence spaces. Then, given a consistent fuzzy competence space and a fuzzy skill mapping, the necessary and sufficient conditions for the existence of gradual and effective learning paths are proposed and proven under the disjunctive model. Finally, a gradual and effective learning path recommendation algorithm is designed, and its effectiveness is validated through simulation experiments. This method provides a theoretical foundation and algorithmic support for the development of adaptive learning systems and intelligent testing systems.
Keywords:
knowledge space theory; fuzzy competence state; fuzzy competence structure; consistent fuzzy competence space; learning paths recommendation; gradual and effective learning paths; adaptive learning; intelligent testing MSC:
68T05; 03E72
1. Introduction
Knowledge Space Theory (KST) is a mathematical framework for modeling and assessing an individual’s knowledge state, first introduced by Doignon and Falmagne [1]. Rooted in probabilistic measurement theory and mathematical psychology, KST evolved from foundational work in extensive measurement [2], multidimensional scaling [3,4,5], and conjoint measurement models [6,7]. Foundational contributions [1,8] established the theoretical basis for modeling knowledge structures based on logical dependencies among items. KST provides a formal mechanism to infer a person’s knowledge level in a specific domain based on their responses to a set of problems [9,10,11]. As the theory has evolved, KST has found applications in various domains—especially in educational psychology, artificial intelligence, and knowledge assessment—emerging as a powerful tool for evaluating individual knowledge states. Its successful applications include supporting learning, adaptive testing, and intelligent assessment systems [12,13,14,15].
During the evolution of KST, researchers gradually recognized that modeling a learner’s mastery solely based on a set of knowledge points has its limitations. Consequently, the incorporation of “competence” as an additional dimension has emerged as an important direction for extending KST [16,17,18]. Competence-based KST focuses on the holistic competence structures exhibited by learners in problem-solving, skill acquisition, and knowledge application, rather than simply judging responses as correct or incorrect [19]. This paradigm shift allows for a more nuanced representation of learner performance across varied tasks and contexts, enabling more targeted strategies for personalized instruction and assessment [20]. In terms of research methodology, many scholars have divided skills or competences into multiple dimensions or sub-skills, and employed hierarchical analyses based on cognitive process models or task structures to construct competence frameworks that more accurately reflect real-world learning scenarios [21]. Furthermore, several studies have explored multi-valued or multi-level competence states by modeling varying proficiency levels for the same skill, thereby enhancing the diagnostic and evaluative power of KST [22,23]. Competence-based KST not only more accurately captures the integrated mastery of knowledge and skills but also provides new perspectives and opportunities for personalized learning path planning, adaptive testing, and targeted instructional interventions [24,25,26,27,28].
To address the limitations of traditional KST in diagnostic precision and expressive diversity, researchers have integrated it with cognitive diagnosis theory, rough set theory, formal concept analysis, and fuzzy set theory, thereby enriching its representational capabilities from multiple perspectives [29,30,31,32]. In conjunction with cognitive diagnosis theory, research has focused on quantitatively evaluating learners’ fine-grained competencies by mapping item–attribute relationships, thereby improving the applicability of KST in individualized assessment [29]. In contrast, integrating rough set theory with KST addresses knowledge representation and reasoning under incomplete or uncertain information, offering more robust modeling approaches for learning states affected by noise or missing data [30]. Meanwhile, formal concept analysis, which depicts the lattice structures inherent in the associations among concepts, objects, and attributes, aligns well with the visualization and hierarchical characteristics of KST [33,34,35].
Among the extended approaches, integrating KST with fuzzy set theory has drawn particular attention. First introduced by Zadeh in 1965, fuzzy set theory provides a rigorous mathematical framework for representing and manipulating imprecise information [36]; it has since become a cornerstone technique in data science and artificial intelligence. Traditional KST typically adopts a dichotomous classification, labeling the learner’s mastery of a knowledge point or skill as either “mastered” or “not mastered”. However, in real learning scenarios, learners often exist in a fuzzy zone between full mastery and non-mastery. The integration of fuzzy set theory enables the representation of mastery levels through membership values, effectively overcoming the constraints of binary classifications [32]. Building on this foundation, researchers have proposed fuzzy skill maps to characterize the fuzzy relationships between skills and tasks or problems, enabling the construction of more flexible and accurate competence or knowledge structures [22,37,38]. Subsequent studies have explored the integration of fuzzy skill maps with graded proficiency levels to construct polytomous knowledge structures that more precisely capture the progressive mastery of learners at different stages [39]. These advancements lay a solid foundation for research on personalized learning path recommendation within fuzzy competence spaces, facilitating more nuanced diagnostic feedback and tailored instructional support.
Personalized learning path recommendation seeks to dynamically deliver suitable learning resources and task sequences tailored to learners’ diverse needs, current proficiency levels, and specific learning goals. These systems not only improve learning efficiency and alleviate the cognitive burden of information overload but also enhance learners’ engagement and motivation [40,41,42]. By leveraging big data and artificial intelligence, recent research has combined user profiling, knowledge graphs, and intelligent assessment techniques to design diverse learning path recommendation systems across various disciplines [43,44,45]. The incorporation of KST in this domain provides a logical and interpretable foundation for personalized recommendations by inferring learners’ knowledge states and prerequisite relationships. By identifying a learner’s current position within the knowledge structure, the system can predict the most appropriate next learning unit or assessment item [44,45,46]. Nevertheless, existing approaches primarily rely on binary or discretized evaluations of knowledge states, often neglecting the gradual and diverse nature of learners’ competence development. Consequently, such systems frequently fail to capture the dynamic progression from initial understanding to proficient mastery, which limits the precision and adaptability of personalized learning path recommendations.
As understanding of the learning process deepens, researchers have increasingly turned their attention to polytomous representations of knowledge and skills, culminating in the formalization of polytomous knowledge structures [46]. Compared to dichotomous knowledge structures, polytomous knowledge structures enable multi-level and continuous differentiation of the same knowledge point or skill, more accurately reflecting the gradual nature of learning [47]. Researchers have conducted systematic investigations into this concept, exploring aspects such as multi-level partitioning, structural closure, reachability, and their applications in assessment and instructional intervention [48,49]. These studies have yielded valuable insights for advancing personalized learning path recommendations.
Currently, most personalized learning path recommendation approaches based on KST primarily focus on “knowledge structures” by determining whether learners have mastered specific knowledge points or skills, while paying relatively little attention to the underlying competence structure—especially the application of fuzzy competence structures. This limitation results in recommendation systems that inadequately capture the gradual improvement in learners’ competence, making it difficult to fully represent the dynamic evolution from “initial mastery” to “proficient mastery”. To address these shortcomings, this paper proposes a learning path recommendation method based on fuzzy competence spaces. The proposed method ensures that learners can progressively improve their knowledge state by increasing only one proficiency level of a skill at a time, thereby closely mirroring real-world learning processes.
Specifically, this study formally defines fuzzy competence states, fuzzy competence structures, and consistent fuzzy competence spaces, laying a solid theoretical foundation. Moreover, it establishes and proves the necessary and sufficient conditions for the existence of gradual and effective learning paths under the disjunctive model. Furthermore, the study designs a learning path recommendation algorithm that respects the principle of single-skill incremental learning. The proposed approach is validated through rigorous simulation experiments, demonstrating its practical feasibility and applicability. Collectively, these contributions provide robust theoretical and algorithmic support for the development and implementation of intelligent assessment and adaptive learning systems.
The remainder of this paper is structured as follows. Section 2 introduces theoretical preliminaries. Section 3 presents the fuzzy competence framework. Section 4 describes the proposed learning path recommendation algorithm. Section 5 reports the results of simulation experiments. Section 6 concludes the paper and outlines potential directions for future research.
2. Preliminaries
This section briefly reviews the core concepts of knowledge space theory and fuzzy skills. Comprehensive treatments of these notions can be found in [1,22].
Definition 1
([1]). Let be a nonempty finite set of problems. In an ideal state (i.e., free from distractions such as carelessness or guessing), the subset of that an individual can correctly answer is called the individual’s knowledge state, denoted by , where . Both and can also be viewed as knowledge states. indicates that the individual cannot solve any problem in , while indicates that the individual can solve all problems. We use the pair to denote the family of all such knowledge states, referred to as a knowledge structure. When there is no confusion, we simply use to represent the knowledge structure . If for any it holds that , then is called a knowledge space.
When the knowledge structure is a knowledge space, it implies that individuals can learn from and collaborate with each other to solve problems that one cannot answer but the other can. In this way, both parties’ knowledge states are integrated and enhanced.
Definition 2
([22]). Let be a nonempty finite set of problems and let be a nonempty finite set of skills related to solving problems in . is defined as follows:
where is a mapping from the skill set to the interval . It can be written as follows:
with for all .
From the perspective of fuzzy sets, can be regarded as a fuzzy set, where denotes the membership degree of element in the fuzzy set . For any and , represents the individuals’ potential competence state, referred to as a fuzzy competence state, and indicates the individuals’ level of mastery of skill .
Some operations defined on are as follows:
Traditional competence states record only the skills that an individual has mastered and can be written as . By contrast, a fuzzy competence state specifies a degree of mastery for every skill, thereby capturing an individual’s competence more accurately.
Definition 3
([22]). The triple is called a fuzzy skill mapping, where and denote nonempty finite sets of problems and skills, respectively, and
For any , indicates the minimum skill level required to solve , denoted by . If , it implies that skill is irrelevant to the solution of problem .
Under the disjunctive model, for the individuals with a fuzzy competence state , they can solve a problem as long as there exists a skill for which the individuals’ mastery level is not lower than the minimum requirement for that problem. Therefore, the knowledge state of the individuals with fuzzy competence state can be expressed as follows:
Example 1.
Consider a fuzzy skill mapping , where , , , and . Suppose an individual’s fuzzy competence state is . Since solving does not require skill , and the minimum mastery levels for and are both 0.5, this individual cannot solve. Similarly, they cannot solve , and thus their knowledge state is . If another individual has a competence state , they can solve both and , and hence their knowledge state is .
In practice, fuzzy skill mappings are usually defined by domain experts. Nevertheless, there is no consistent standard for specifying the exact values of , and the values of are often determined retrospectively. In Example 1, if we consider another competence state such that , but the individual can still solve , it implies that there is a certain range constraint for (for instance, ). If we change from to , this range-based judgment remains unaffected, indicating that small adjustments to certain skill thresholds do not alter the individual’s set of solvable problems.
3. Fuzzy Competence Space
In general, is not necessarily a valid fuzzy competence state. For instance, consider an object-oriented programming context where skill represents “declaring a class” and skill represents “declaring a derived class”. If an individual’s competence state is , it indicates that the person has a solid grasp of “declaring a class” but has not begun learning “declaring a derived class”. In this example, it is clear that cannot be a valid fuzzy competence state because it conflicts with the learning progression required in object-oriented programming, where “declaring a class” is fundamental to “declaring a derived class”. We next discuss the concept of a fuzzy competence structure.
Definition 4
([50]). Let be a nonempty finite set and denote
Here is an index set. A subset is called a transversal of the family . If there exists a bijection such that for every , it holds that .
For example, let and , where and . Suppose and there is a bijection with . Let and . Then, and , so is a transversal of . Similarly, , , and are also transversals of .
Given a skill set , for each , let be a nonempty finite set of numerical values, where represents all possible “response values” (or proficiencies) of skill , with as the maximum element and as the minimum element. The relation retains the usual ordering of real numbers. Define
which is the set of all pairs formed by each skill and its possible proficiency values. Let be the family of subsets built from each skill and its proficiency values. A transversal of this family is denoted by , with the requirement that there exists a bijection such that for any we have , where .
Example 2.
Let , with and . Then
Let be a transversal of and suppose there is a bijection such that for any we have . Denote by the family of all such transversals. Consequently, we obtain the following:
Based on the above, we now introduce the definition of a fuzzy competence structure.
Definition 5.
Let be a nonempty finite set of skills and for each , let be a finite set of numerical values whose minimum element is and maximum element is . Let denote the family of all transversals of . Suppose there exists a subset satisfying , and . Then, the triple is called a fuzzy competence structure and any is referred to as a fuzzy competence state.
Example 3.

Let with and . Let be the family of all transversals of . There are such transversals in total, and each corresponds to one state. Table 1 lists of these states, denoted by for . In particular, and , and it holds that . By Definition 5, the family of these states forms a fuzzy competence structure . Any is regarded as a fuzzy competence state in .
Table 1.
A sample of fuzzy competence states.
Definition 6.
Let be a fuzzy competence structure and let be a given fuzzy skill mapping. For any , under the disjunctive model, define the following:
and denote . Then, is called the fuzzy disjunctive problem function corresponding to . Moreover, define the following:
as the knowledge structure induced by and under the disjunctive model.
Proposition 1.
Let be a fuzzy competence structure and let be a fuzzy skill mapping. Suppose is the fuzzy disjunctive problem function corresponding to . Then, the following three properties hold:
- (1)
- is surjective;
- (2)
- and ;
- (3)
- if and , then .
Proof.
(1) By Definition 6, . Hence, for every knowledge state , there is at least one such that . Therefore, is surjective.
(2) When , for all , Thus, for all , there is no such that . Consequently, . When , for all and , . Therefore, .
(3) Suppose . Then, for all . If , there exists some such that . Hence, , implying . □
Example 4 (Continuation of Example 3).
Given , the fuzzy skill mapping is shown in Table 2, and the corresponding knowledge states and fuzzy competence states are presented in Table 3. As shown in Table 2, solving problem is independent of skills and and requires at least a proficiency level of in skill to solve it. Therefore, individuals with fuzzy competence states and both have the knowledge state . This case demonstrates that although individuals may have varying levels of proficiency in different skills, their knowledge state can be determined based on the fuzzy competence state. For instance, if an individual’s proficiency in skill is or higher, they are able to solve problem , and no higher proficiency level is required.
Table 2.
Fuzzy skill mapping table.
Table 3.
Fuzzy Competence States and Corresponding Knowledge States.
The fuzzy competence structure is merely a pre-established evaluation criterion. For example, in the IELTS exam, some candidates achieve a score of 7 but do not reach 7.5. These candidates may have varying levels of English proficiency, but the IELTS exam cannot further differentiate their proficiency levels. Therefore, the form of the fuzzy competence structure and the specification of the fuzzy skill mapping are independent of each other. In Example 3, for an individual whose knowledge state is , their fuzzy competence state will be determined as . Naturally, since skill acquisition is a continuous process, a learner’s proficiency in skill could be or some other value; however, such granularity is not captured in this fuzzy competence structure.
Definition 7.
Given a fuzzy competence structure
, if for any , it holds that , then is called a fuzzy competence space.
Proposition 2.
Given a fuzzy competence structure and a defined fuzzy skill mapping , the knowledge structure induced by
and is a knowledge space.
Proof.
For any , there exist . From Proposition 1(3), we obtain and , so holds. For any , there exists a skill such that , thus or . Therefore or , so holds. In conclusion, . By Definition 1, is a knowledge space. □
Definition 8.
where the absolute value symbol indicates the number of elements in the set.
Given a fuzzy competence structure , we define the following operations and symbols:
- (1)
- For any , let
- (2)
- For any , if , define
- (3)
- For any , where for , define
- (4)
- For any , if , define
In Example 3, a fuzzy competence state chain of the form , adjacent fuzzy competence states satisfy , and .
Definition 9.
Given a fuzzy competence structure , if satisfies the following two properties, then is called consistent:
- (1)
- For any , if , there exist such that = , and , where ;
- (2)
- For any , if , and , suppose , then there exist such that = , and , where .
Given a fuzzy competence structure , if it is consistent, then is called a consistent fuzzy competence space.
A consistent fuzzy competence space has three educational learning principles similar to those of a knowledge space:
- (1)
- Closure under union of competences: this guarantees that individuals can interact and learn from one another, enabling their fuzzy competence states to merge and improve;
- (2)
- Gradualness of skill learning: for fuzzy competence states , if , there exists a chain of fuzzy competence states as described in Definition 8(1) and (2), meaning individuals can progressively learn skills;
- (3)
- Consistency of skill learning: an individual’s improvement in fuzzy competence states does not interfere with the learning of certain skills.
Proposition 3.
Given a fuzzy competence space and , where , and . Suppose . For any , and , if , define , where , and , then .
Proof.
Since and , and is a fuzzy competence, it follows that . For any , we have , so . For we have , so . It follows that , and hence . By Definition 8(2), it follows that . □
Remark 1.
Consider as the initial fuzzy competence state of an individual. Since and , the individual reaches fuzzy competence state by learning skill . For another individual, whose fuzzy competence state is , and , this individual can also improve their fuzzy competence state by learning skill , which shows that the improvement in competence does not interfere with the learning of skills.
4. Learning Paths of Fuzzy Skills
As shown in Example 3, the fuzzy disjunctive problem function is not necessarily a bijection, meaning that the potential competence level of an individual cannot be uniquely inferred from their knowledge state. The following proposition provides a method for determining the upper bound of an individual’s potential competence level in a fuzzy competence space.
Proposition 4.
Given a fuzzy competence space and fuzzy skill mapping , let be the fuzzy disjunctive problem function corresponding to . is the knowledge space induced by and under the disjunctive model. For , let , then the following two properties hold:
- (1)
- , and ;
- (2)
- For any , .
Proof.
(1) represents the family of fuzzy competence states of all individuals with knowledge state . Since is a fuzzy competence space, always holds. As in the proof of Proposition 2, we have .
(2) If there exists such that , i.e., there exists such that , then there exists such that . This implies that , which contradicts . □
While consistent fuzzy competence spaces ensure gradual skill learning, they do not guarantee changes in knowledge states. For instance, in Example 4, although , but , i.e., . This indicates that an improvement in competence does not necessarily lead to an improvement in the knowledge state. The literature [24] refers to such a learning method or learning path as “ineffective”. The following proposition explores the existence of effective learning paths.
Proposition 5.
Given a consistent fuzzy competence space and a fuzzy skill mapping , let be the fuzzy disjunctive problem function corresponding to . is the knowledge space induced by and under the disjunctive model. Define , and if , the following two propositions hold:
- (1)
- The fuzzy disjunctive problem function is a bijection;
- (2)
- Given and , for any knowledge state with , there exist such that = , and , and the following conditions hold: and , where .
Proof.
(1) Since , and by Proposition 4(1), we know that , and since , for any , we have , so is a bijection.
(2) Since is a bijection, for any , there exist such that and . For any , we have , so . This is consistent with the definition of a consistent fuzzy competence structure. Therefore, the proposition holds. □
If for any fuzzy competence state , and any knowledge state , there exists a gradual and effective learning path as shown in Proposition 5(2), such a learning model benefits all learners. We call such a learning model “effective”. Proposition 5 provides a sufficient condition for the validity of the learning model, namely that is a consistent fuzzy competence space and . The following proposition provides a more general case.
Proposition 6.
Given a consistent fuzzy competence space and a fuzzy skill mapping , let be the fuzzy disjunctive problem function corresponding to . is the knowledge space induced by and under the disjunctive model. If the learning model is effective, then for any knowledge states with , we have .
Proof.
Assume there exist , such that , and . Suppose is the smallest knowledge state containing , i.e., there does not exist such that . Let , and . Define and . If the learning model is effective, there exist and , such that . Clearly, in this case, and do not have an inclusion relationship, so . Since , this contradicts the assumption. □
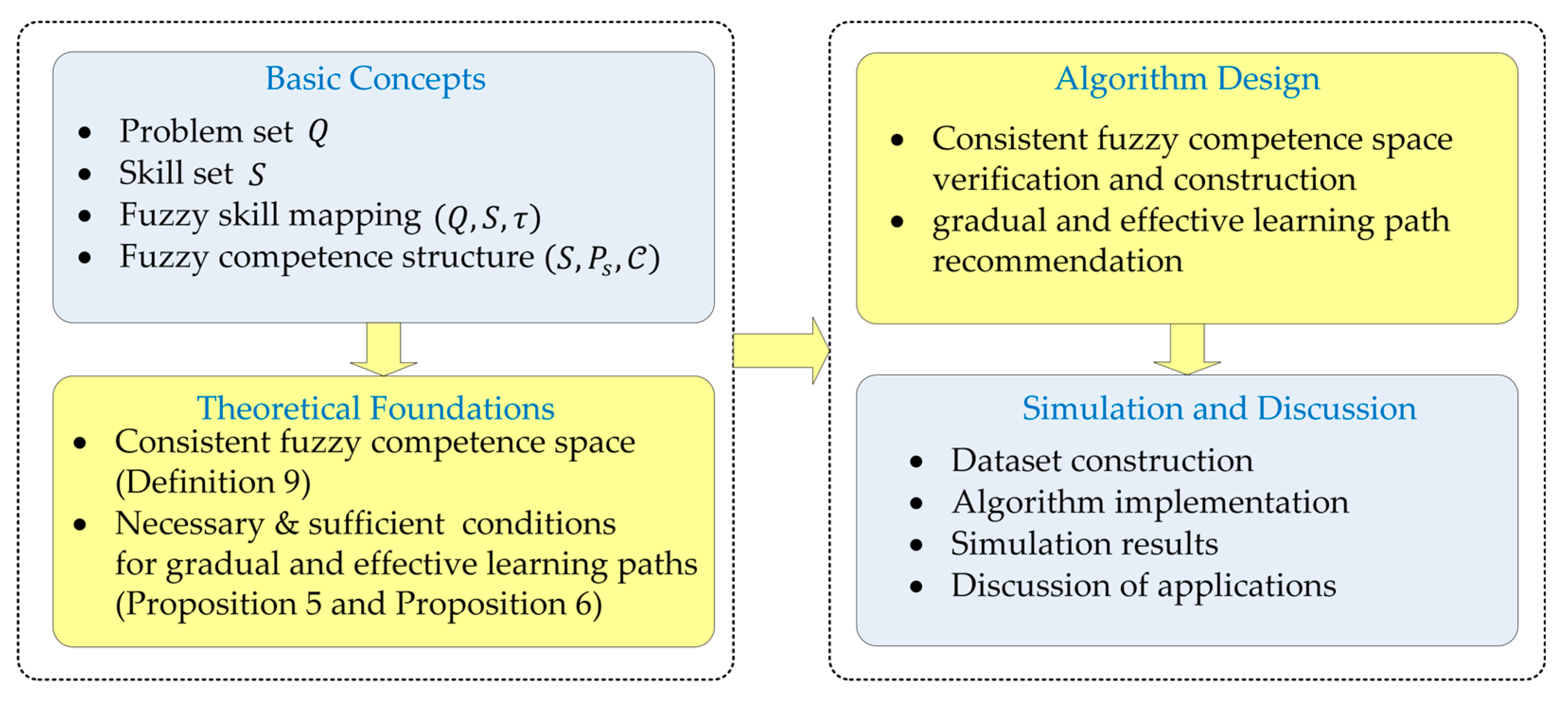
The preceding theoretical investigation establishes the foundation for a learning-path recommendation method within fuzzy competence spaces. Building on this foundation, Figure 1 presents the overall research framework of the proposed method. The upper-left quadrant contains the fundamental concepts used throughout the paper, namely the problem set , the skill set , the fuzzy skill mapping , and the fuzzy competence structure . The lower-left quadrant provides the theoretical underpinning: The definition of a consistent fuzzy competence space given in Definition 9, and the necessary and sufficient conditions for the existence of gradual and effective learning paths stated in Propositions 5 and 6. The upper-right quadrant corresponds to the algorithmic layer, including the validation and construction of a consistent fuzzy competence space and the generation of gradual and effective learning paths. Finally, the lower-right quadrant covers simulation and discussion, comprising dataset construction, algorithm implementation, analysis of simulation results, and discussion of application scenarios. Arrows illustrate the dependencies among these components.
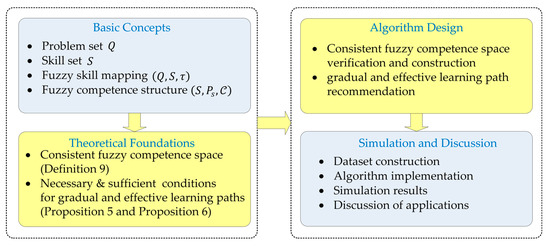
Figure 1.
The overall research framework.
When the conditions of Proposition 5 are satisfied, every pair of knowledge states in the knowledge space induced by a consistent fuzzy competence space and a fuzzy skill mapping can be connected by a gradual and effective learning path. In practical learning environments, the path of greatest interest is the one that starts from the initial knowledge state and ends at the final knowledge state . Such a path upgrades exactly one skill-proficiency level at each step and guarantees a simultaneous improvement in the knowledge state until is reached, thereby minimizing learning time and markedly enhancing learning efficiency.
According to Proposition 5, if is a consistent fuzzy competence space and , a gradual and effective learning path from to is assured to exist; if , the existence of such a path cannot be determined a priori. Algorithm 1 outlines the overall procedure for searching a gradual and effective learning path from to given and . Algorithm 2 refines Steps 1–2 of Algorithm 1 by deciding whether the given fuzzy competence structure is a consistent fuzzy competence space. Algorithm 3 refines Steps 3–5 by verifying whether the equality in Proposition 5 holds. Algorithm 4 further refines Step 6 and is responsible for finding the gradual and effective learning path. It is important to emphasize that Algorithm 4 is executed regardless of whether holds; if a gradual and effective learning path from to is found, it is reported, otherwise an informative message is returned.
| Algorithm 1 Learning path recommendation algorithm | |
| Input: A fuzzy competence structure and a fuzzy skill mapping . | |
Output: One of the following two outcomes:
| |
| 1: | Check whether is a fuzzy competence space. If yes, continue to Step 2; otherwise, , go to Step 7. |
| 2: | Check whether is a consistent fuzzy competence space. If yes, proceed to Step 3; otherwise, , go to Step 7. |
| 3: | Compute the knowledge space induced by the fuzzy competence space and the fuzzy skill mapping . |
| 4: | Compute . |
| 5: | Compute the set cardinalities of and denoted as and . |
| 6: | Finding and drawing the gradual and effective learning path. |
| 7: | IF then Output “No gradual and effective learning path exists”. |
| 8: | End. |
| Algorithm 2 Refines Steps 1–2 of Algorithm 1. Deciding whether the given fuzzy competence structure is a consistent fuzzy competence space. | |
| Input: A fuzzy competence structure . | |
| Output: TRUE if is a consistent fuzzy competence space; FALSE otherwise | |
| 1: | for each pair in do |
| 2: | if then |
| 3: | return FALSE |
| 4: | end if |
| 5: | end for |
| 6: | create empty directed graph |
| 7: | for each pair in with do |
| 8: | then |
| 9: | |
| 10: | end if |
| 11: | end for |
| 12: | for each pair |
| 13: | if no path from then |
| 14: | return FALSE |
| 15: | end if |
| 16: | end for |
| 17: | for each pair in with and do |
| 18: | |
| 19: | |
| 20: | |
| 21: | do |
| 22: | |
| 23: | then |
| 24: | return FALSE |
| 25: | end if |
| 26: | end for |
| 27: | end for |
| 28: | return TRUE |
| Algorithm 3 Refines Steps 3–5 of Algorithm 1. | |
| Input: A consistent fuzzy competence space and a fuzzy skill mapping . | |
| Output: | |
| 1: | |
| 2: | |
| 3: | create empty dictionary //key: knowledge state |
| 4: | to do |
| 5: | |
| 6: | |
| 7: | for each problem do |
| 8: | for each skill do |
| 9: | if then |
| 10: | ; break |
| 11: | end if |
| 12: | end for |
| 13: | |
| 14: | if not in then |
| 15: | empty list |
| 16: | end if |
| 17: | |
| 18: | end for |
| 19: | end for |
| 20: | |
| 21: | |
| 22: | for each in do |
| 23: | |
| 24: | |
| 25: | for do |
| 26: | |
| 27: | end for |
| 28: | |
| 29: | end for |
| 30: | |
| 31: | |
| 32: | |
| Algorithm 4 Refines Step 6 of Algorithm 1. Finding and drawing the gradual and effective learning path. | |
| Input: | |
| Output: | |
| 1: | then |
| 2: | |
| 3: | else |
| 4: | |
| 5: | end if |
| 6: | by each skill’s proficiency in lexicographical order |
| 7: | |
| 8: | |
| 9: | |
| 10: | |
| 11: | do |
| 12: | |
| 13: | |
| 14: | then |
| 15: | |
| 16: | continue |
| 17: | end if |
| 18: | |
| 19: | then |
| 20: | |
| 21: | |
| 22: | |
| 23: | then |
| 24: | break |
| 25: | end if |
| 26: | end if |
| 27: | |
| 28: | end while |
| 29: | |
| 30: | |
| 31: | |
| 32: | |
| 33: | STOP |
| 34: | end if |
| 35: | |
5. Simulation Experiments
To verify the effectiveness of Algorithm 1, we carried out a set of simulation experiments. The experiments were executed on an Intel® Core™ i7-9700 CPU @ 3.00 GHz with 16 GB RAM under Windows 10, and the simulator that implements Algorithm 1 was written in Python 3.13.2.
First, we built ten datasets of different sizes, denoted d01–d10. Each dataset consists of three parts: (i) the skills together with their proficiency levels, (ii) the fuzzy competence states, and (iii) the fuzzy skill mapping; the basic statistics are listed in Table 4.
Table 4.
Basic information of the first group of 10 datasets.
For every dataset, the fuzzy competence states comprise all possible states, which guarantees that the dataset forms a consistent fuzzy competence space and that a gradual and effective learning path from to always exists.
All datasets are stored as Excel workbooks. The ps sheet stores the skills and their proficiency levels, the fcs sheet stores the fuzzy competence states, and the fsm sheet stores the fuzzy skill mapping. Taking dataset d03 as an example, the three sheets are shown in Table 5, Table 6 and Table 7.
Table 5.
Dataset d03—ps worksheet.
Table 6.
Dataset d03—fcs worksheet.
Table 7.
Dataset d03—fsm worksheet.
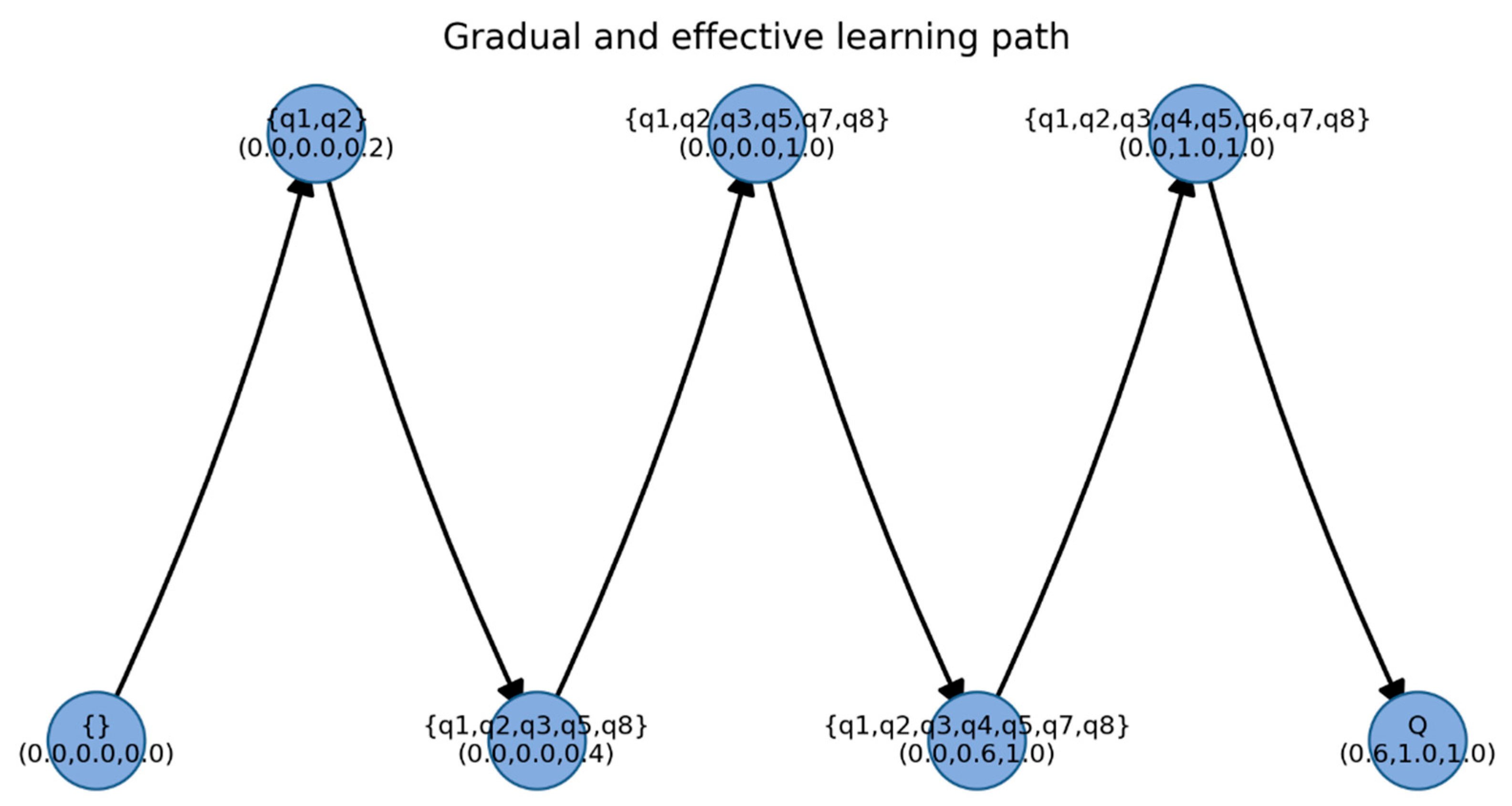
The simulator read the ten datasets and successfully located a gradual and effective learning path from to for each of them, which confirms the validity of the algorithms proposed in Section 3 of this paper. Using dataset d03 as an example, the knowledge structure obtained by the simulation program is presented in Table 8. The gradual and effective learning path found from to is depicted in Figure 2.
Table 8.
Knowledge structure derived for dataset d03.
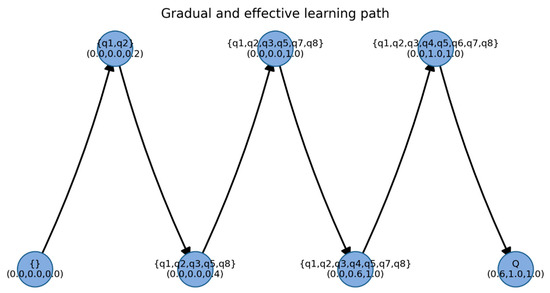
Figure 2.
Gradual and effective learning path for dataset d03.
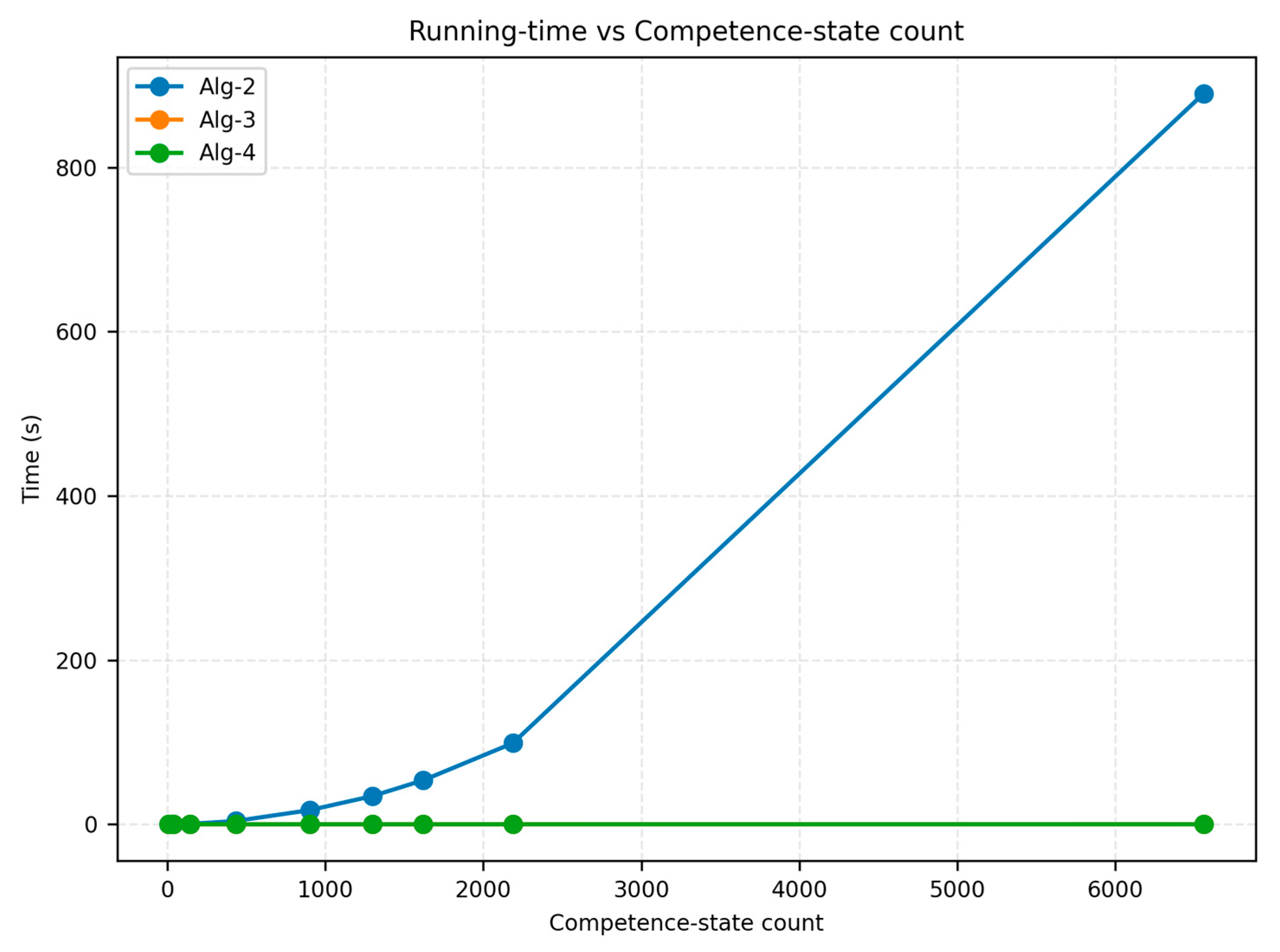
Table 9 reports the simulation results for the first ten datasets; the column |Ĉ| gives the cardinality of , while columns t_alg2, t_alg3 and t_alg4 give, respectively, the execution time of Algorithms 2–4. columns %A2, %A3 and %A4 show their percentages of the total time given by column t_sum. It is clear that, as grows, the total running time is dominated by Algorithm 2. The same trend can be seen in Figure 3, which plots the running time against the number of fuzzy competence states. It is worth noting that, as the number of fuzzy competence states grows, the running-time of Algorithm 2 is several orders of magnitude larger than those of Algorithms 3 and 4. Consequently, the curves for Algorithms 3 and 4 overlap and almost degenerate into a straight horizontal line; therefore, only the curve representing Algorithm 4 is visually discernible in Figure 3.
Table 9.
Simulation results for the first dataset group.
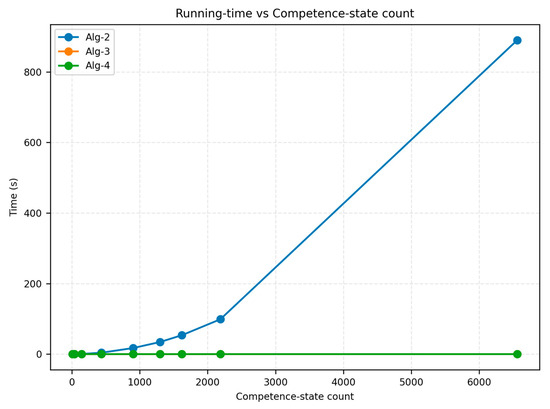
Figure 3.
Running-time versus the number of fuzzy competence states.
To study how the numbers of skills and problems affect the running time, we constructed another group of ten datasets with different skill and problem scales, as summarized in Table 10.
Table 10.
Basic information of the second group of 10 datasets.
The simulation results of this second group are summarized in Table 11.
Table 11.
Simulation results for the second dataset group.
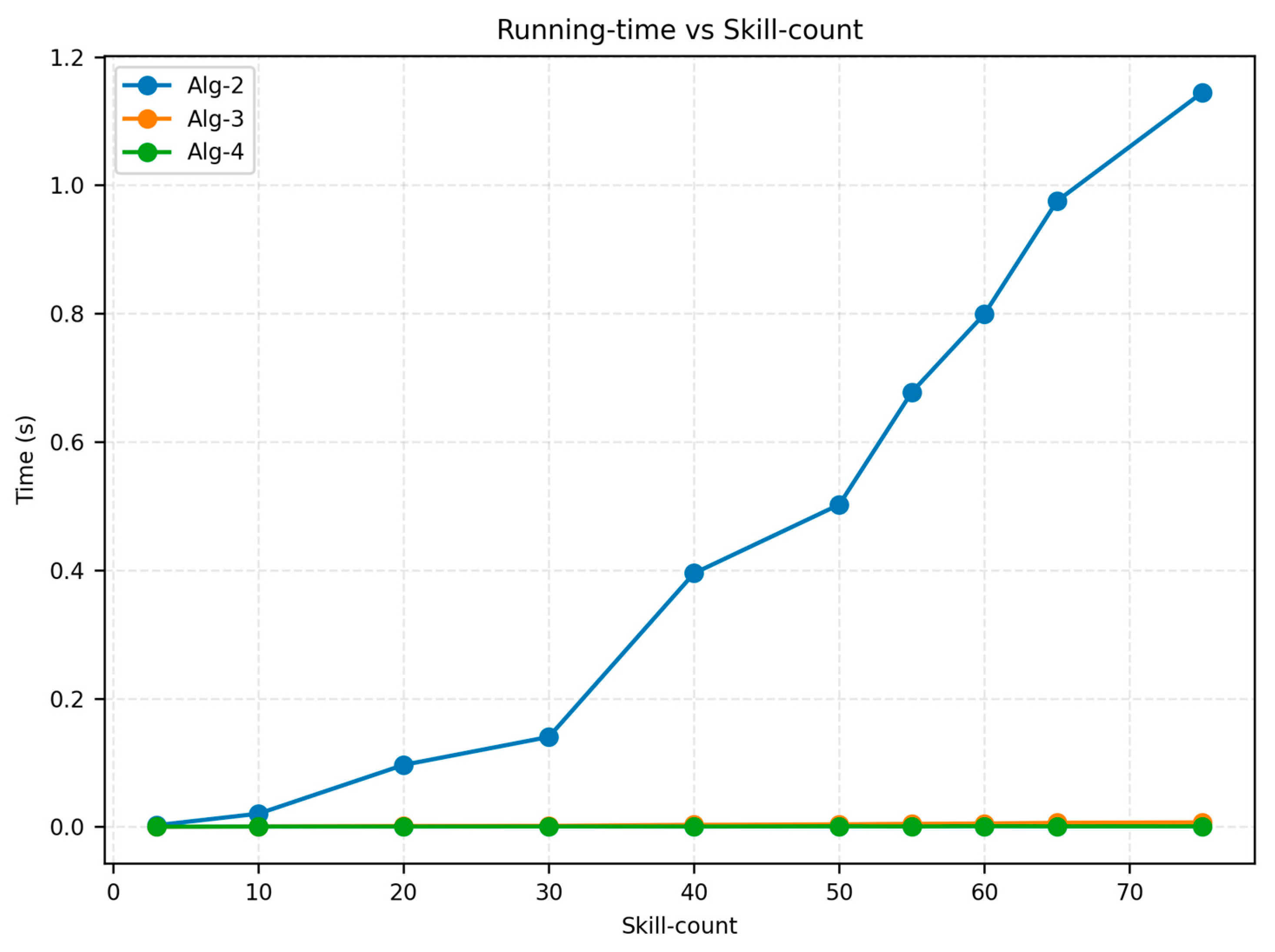
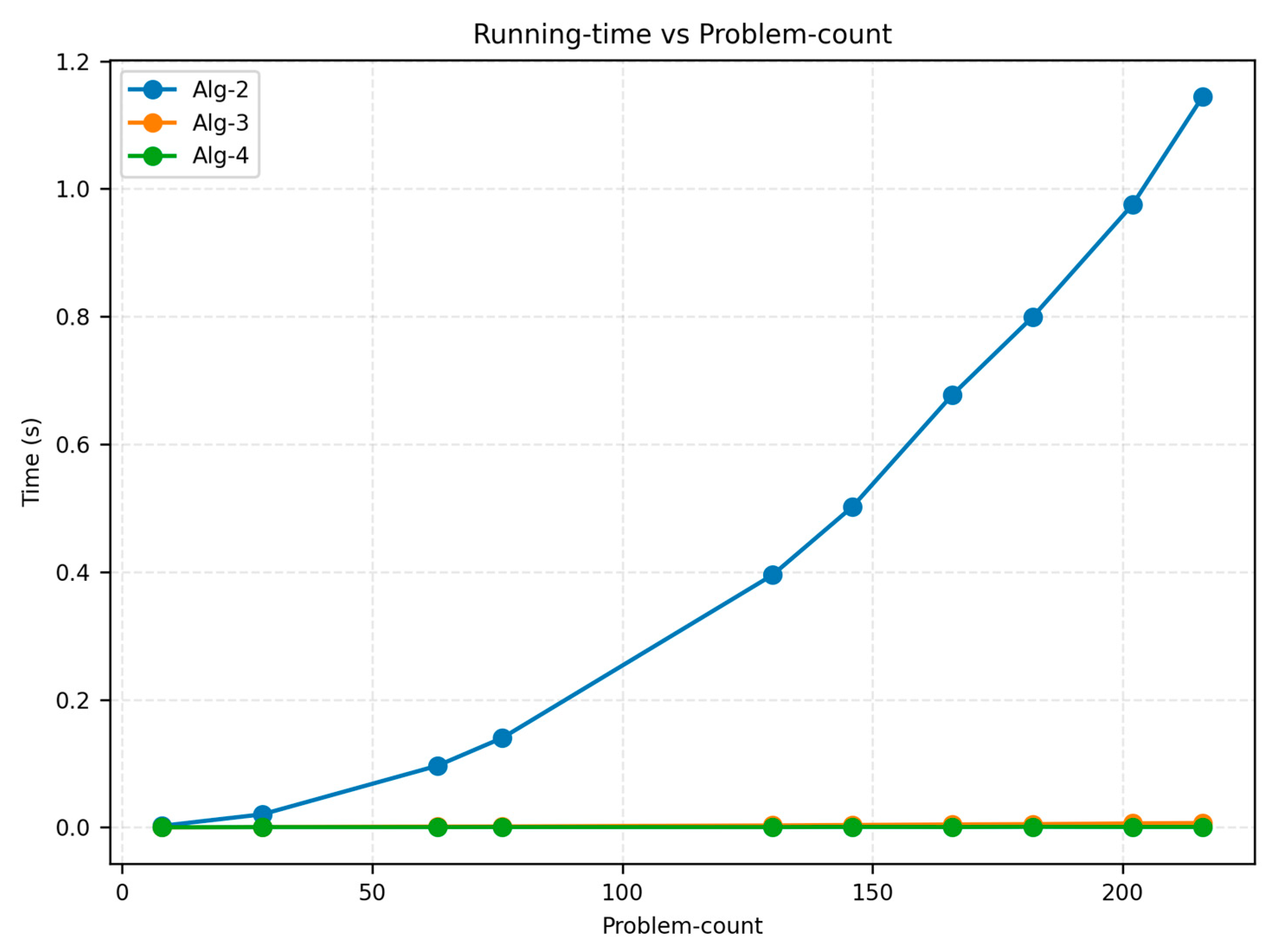
Figure 4 and Figure 5 plot the running time versus the number of skills and the number of problems, respectively.
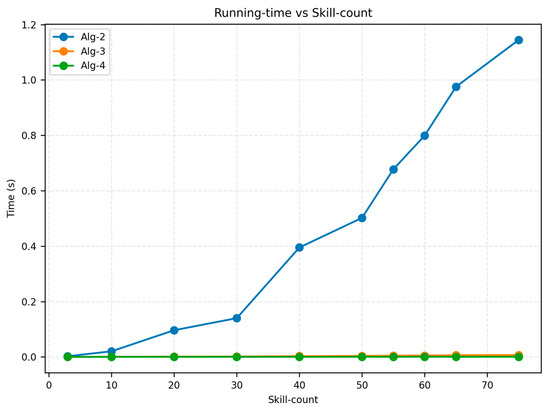
Figure 4.
Running time versus the number of skills.
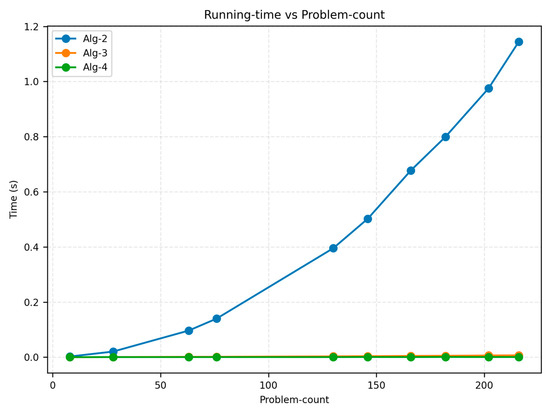
Figure 5.
Running time versus the number of problems.
From Table 11 and Figure 4 and Figure 5, we observe that the running time also increases with the numbers of skills and problems. Comparing the two groups of datasets, we conclude that is the predominant factor that affects the overall running time of the algorithms. It is worth noting that the execution times of Algorithms 3 and 4 remain below 0.02 s for all test cases, which is negligible compared with Algorithm 2. Therefore, any optimization effort should mainly target Algorithm 2.
The simulation results show that when the number of fuzzy competence states is kept below 200, the overall running-time of the algorithms can be limited to less than one second. It should be noted that, in the second group of simulations, the fuzzy competence states of the ten datasets were randomly selected under the prerequisite that they form a consistent fuzzy competence space. The experimental outcomes reveal that, except for dataset d01, none of the remaining datasets possesses a gradual and effective learning path from the initial knowledge state to the target knowledge state .
In practical applications, the number of test items is usually no more than 100. Therefore, constructing a consistent fuzzy competence space with fewer than 200 fuzzy competence states—while guaranteeing, under the corresponding fuzzy skill mapping, the existence of a gradual and effective learning path from to —would be highly desirable. Therefore, beyond further optimizing Algorithm 2, an important avenue for future research is to devise ways to construct a consistent fuzzy competence space with as few competence states as possible while still guaranteeing that the associated fuzzy skill mapping admits a gradual and effective learning path from to .
6. Conclusions
Personalized, gradual, and effective learning paths have direct relevance to two major application domains.
- (1)
- Adaptive Learning Systems. In adaptive learning platforms, the recommended sequence of learning activities must accommodate fine-grained differences in learners’ mastery. Representing each learner’s state as a fuzzy competence state allows the system to assign membership degrees to every skill, so that content delivery, formative assessment and feedback can be aligned with the learner’s exact proficiency. The single-skill-increment principle ensures that the recommended path advances competence step-by-step without cognitive overload, thereby supporting mastery-based progression and just-in-time remediation.
- (2)
- Intelligent Testing Systems. In computerized adaptive testing or intelligent tutoring, the test-engine repeatedly selects the next item that is most informative with respect to the learner’s fuzzy knowledge state. A gradual and effective learning (or testing) path guarantees that item difficulty increases in tandem with skill levels, which safeguards measurement precision while avoiding abrupt jumps that may discourage test-takers.
Within this context, our study formulates personalized learning path recommendation inside the mathematical framework of fuzzy competence structures and consistent fuzzy competence spaces. By replacing the binary notion of mastery with fuzzy membership functions, the proposed approach captures incremental skill acquisition, and Algorithm 1—refined into Algorithms 2–4—systematically searches for a path that increases exactly one skill level at each step.
The current implementation handles small- and medium-scale datasets efficiently (≤200 competence states, total runtime < 1 s). Experimental results indicate that Algorithm 2—the consistency checker—accounts for the major share of computation as the number of competence states increases; when the state space reaches several thousand, runtime becomes prohibitive and limits immediate deployment in very-large-scale scenarios. Ongoing work therefore focuses on optimizing Algorithm 2 through parallel union-closure computation, incremental cover-graph construction, and heuristic state-selection strategies that keep the working set compact.
Future work will evaluate the method on large MOOC platforms by combining cognitive-diagnostic models with log-data analytics; incorporate learner traits such as preferences, metacognition and self-regulation into the fuzzy competence representation to achieve fully adaptive recommendation; extend the technique to cross-disciplinary curricula where skills have complex interdependencies; and investigate theoretical issues—including minimality, redundancy, and path pruning—under consistency constraints. Through these efforts, learning-path recommendation grounded in fuzzy competence space theory is expected to play an increasingly important role in next-generation adaptive learning and intelligent testing technologies.
Author Contributions
Writing—original draft preparation, R.W., B.H., and J.L.; writing—review and editing, R.W., B.H., and J.L.; visualization, R.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded in part by the National Natural Science Foundation of China, grant number “12271191”, and in part by the Natural Science Foundation of Fujian Province, China, grant number “2024J01793”, as well as the Education Research Project for Young and Middle-aged Teachers in Fujian Province, grant number “JAT220280”.
Data Availability Statement
The dataset format is illustrated with examples in the article; further details can be obtained from the first author upon request.
Acknowledgments
The authors extend their heartfelt gratitude to the anonymous reviewers and editors for their meticulous review and valuable suggestions.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| KST | Knowledge space theory |
References
- Doignon, J.-P.; Falmagne, J.-C. Spaces for the assessment of knowledge. Int. J. Man-Mach. Stud. 1985, 23, 175–196. [Google Scholar] [CrossRef]
- Falmagne, J.C. A probabilistic theory of extensive measurement. Philos. Sci. 1980, 47, 277–296. [Google Scholar] [CrossRef]
- Kruskal, J.B. Multidimensional scaling by optimizing goodness of fit to a non-metric hypothesis. Psychometrika 1964, 29, 1–27. [Google Scholar] [CrossRef]
- Kruskal, J.B. Non-metric multidimensional scaling: A numerical method. Psychometrika 1964, 29, 28–42. [Google Scholar] [CrossRef]
- Carroll, J.D.; Chang, J.J. Analysis of individual differences in multidimensional scaling via an N-way generalization of ‘Eckart–Young’ decomposition. Psychometrika 1970, 35, 283–319. [Google Scholar] [CrossRef]
- Falmagne, J.C. Random conjoint measurement and loudness summation. Psychol. Rev. 1976, 83, 65–79. [Google Scholar] [CrossRef]
- Falmagne, J.C. On a class of probabilistic conjoint measurement models: Some diagnostic properties. J. Math. Psychol. 1979, 19, 73–88. [Google Scholar] [CrossRef]
- Falmagne, J.C.; Doignon, J.-P. Learning Spaces; Springer: New York, NY, USA, 1999. [Google Scholar]
- Falmagne, J.C.; Doignon, J.P. A class of stochastic procedures for the assessment of knowledge. Br. J. Math. Stat. Psychol. 1988, 41, 1–23. [Google Scholar] [CrossRef]
- Falmagne, J.-C.; Koppen, P.; Villano, M.; Doignon, J.-P. Introduction to knowledge spaces: How to build, test, and search them. Psychol. Rev. 1990, 97, 201. [Google Scholar] [CrossRef]
- Schrepp, M. A generalization of knowledge space theory to problems with more than two answer alternatives. J. Math. Psychol. 1997, 41, 237–243. [Google Scholar] [CrossRef]
- Heller, J.; Mayer, B.; Hockemeyer, C.; Albert, D. Competence-based knowledge structures for personalised learning. Int. J. E-Learn. 2006, 5, 75–88. [Google Scholar]
- Steiner, C.M.; Albert, D.; Nussbaumer, A. Supporting self-regulated personalised learning through competence-based knowledge space theory. Policy Futures Educ. 2009, 7, 645–661. [Google Scholar] [CrossRef]
- Reddy, A.A.; Harper, M. ALEKS-based placement at the University of Illinois. In Knowledge Spaces: Applications in Education; Falmagne, J.C., Albert, D., Doble, C., Eppstein, D., Hu, X., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 51–68. [Google Scholar]
- Doble, C.; Matayoshi, J.; Cosyn, E.; Uzun, H.; Karami, A. A data-based simulation study of reliability for an adaptive assessment based on knowledge space theory. Int. J. Artif. Intell. Educ. 2019, 29, 258–282. [Google Scholar] [CrossRef]
- Doignon, J.-P. Knowledge spaces and skill assignments. In Contributions to Mathematical Psychology, Psychometrics, and Methodology; Springer: New York, NY, USA, 1994; pp. 111–121. [Google Scholar]
- Düntsch, I.; Gediga, G. Skills and knowledge structures. Br. J. Math. Stat. Psychol. 1995, 48, 9–27. [Google Scholar] [CrossRef]
- Gediga, G.; Düntsch, I. Skill set analysis in knowledge structures. Br. J. Math. Stat. Psychol. 2002, 55, 361–384. [Google Scholar] [CrossRef]
- Stefanutti, L.; Albert, D. Skill assessment in problem solving and simulated learning environments. J. Univers. Comput. Sci. 2003, 9, 1455–1468. [Google Scholar]
- Heller, J.; Augustin, T.; Hockemeyer, C.; Stefanutti, L.; Albert, D. Recent developments in competence-based knowledge space theory. In Knowledge Spaces: Applications in Education; Springer: Berlin/Heidelberg, Germany, 2013; pp. 243–286. [Google Scholar]
- Suck, R. Skills first—An alternative approach to construct knowledge spaces. J. Math. Psychol. 2021, 101, 102517. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, J.; Wang, H.; Sun, W. Skills and fuzzy knowledge structures. J. Intell. Fuzzy Syst. 2022, 42, 2629–2645. [Google Scholar] [CrossRef]
- Stefanutti, L.; Anselmi, P.; de Chiusole, D. Towards a competence-based polytomous knowledge structure theory. J. Math. Psychol. 2023, 115, 102781. [Google Scholar] [CrossRef]
- Stefanutti, L.; de Chiusole, D. On the assessment of learning in competence based knowledge space theory. J. Math. Psychol. 2017, 80, 22–32. [Google Scholar] [CrossRef]
- Anselmi, P.; de Chiusole, D.; Stefanutti, L. The assessment of knowledge and learning in competence spaces: The gain–loss model for dependent skills. Br. J. Math. Stat. Psychol. 2017, 70, 457–479. [Google Scholar] [CrossRef] [PubMed]
- de Chiusole, D.; Anselmi, P.; Stefanutti, L. Stat-Knowlab. Assessment and learning of statistics with competence-based knowledge space theory. Int. J. Artif. Intell. Educ. 2020, 30, 668–700. [Google Scholar] [CrossRef]
- Anselmi, P.; Stefanutti, L.; de Chiusole, D. Constructing, improving, and shortening tests for skill assessment. J. Math. Psychol. 2022, 106, 102621. [Google Scholar] [CrossRef]
- Anselmi, P.; de Chiusole, D.; Stefanutti, L. Constructing tests for skill assessment with competence-based test development. Br. J. Math. Stat. Psychol. 2024, 77, 429–458. [Google Scholar] [CrossRef]
- Heller, J.; Stefanutti, L.; Anselmi, P.; Robusto, E. On the link between cognitive diagnostic models and knowledge space theory. Psychometrika 2015, 80, 995–1019. [Google Scholar] [CrossRef]
- Liu, G. Rough set approaches in knowledge structures. Int. J. Approx. Reason. 2021, 138, 78–88. [Google Scholar] [CrossRef]
- Xie, X.; Xu, W.; Li, J. A novel concept-cognitive learning method: A perspective from competences. Knowl. Based Syst. 2023, 265, 110382. [Google Scholar] [CrossRef]
- Sun, W.; Li, J.; Ge, X.; Lin, Y. Knowledge structures delineated by fuzzy skill maps. Fuzzy Sets Syst. 2021, 407, 50–66. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, J.; Yang, H.; Xu, Q.; Yang, T.; Feng, D. Knowledge structures construction and learning paths recommendation based on formal contexts. Int. J. Mach. Learn. Cybern. 2024, 15, 1605–1620. [Google Scholar] [CrossRef]
- Yang, H.-L.; Xie, X.; Li, J. A concept fringe-based concept-cognitive learning method in skill context. Knowl. Based Syst. 2024, 305, 112618. [Google Scholar] [CrossRef]
- Zhou, Y.F.; Yang, H.L.; Li, J.J.; Wang, D.L. Skill assessment method: A perspective from concept-cognitive learning. Fuzzy Sets Syst. 2025, 508, 109331. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Xu, B.; Li, J. The inclusion degrees of fuzzy skill maps and knowledge structures. Fuzzy Sets Syst. 2023, 465, 108540. [Google Scholar] [CrossRef]
- Xu, B.; Li, J.; Sun, W.; Wang, B. On delineating forward-and backward-graded knowledge structures from fuzzy skill maps. J. Math. Psychol. 2023, 117, 102819. [Google Scholar] [CrossRef]
- Sun, W.; Li, J.; Lin, F.; He, Z. Constructing polytomous knowledge structures from fuzzy skills. Fuzzy Sets Syst. 2023, 461, 108395. [Google Scholar] [CrossRef]
- Nabizadeh, A.H.; Leal, J.P.; Rafsanjani, H.N.; Shah, R.R. Learning path personalization and recommendation methods: A survey of the state-of-the-art. Expert Syst. Appl. 2020, 159, 113596. [Google Scholar] [CrossRef]
- Zhu, F.; Wen, Y.; Fu, Q. A survey on learning path recommendation. In CCF Conference on Computer Supported Cooperative Work and Social Computing; Springer: Singapore, 2021; pp. 577–589. [Google Scholar]
- Bayly-Castaneda, K.; Ramirez-Montoya, M.S.; Morita-Alexander, A. Crafting personalized learning paths with AI for lifelong learning: A systematic literature review. Front. Educ. 2024, 9, 1424386. [Google Scholar] [CrossRef]
- Peng, H.; Ma, S.; Spector, J.M. Personalized adaptive learning: An emerging pedagogical approach enabled by a smart learning environment. Smart Learn. Environ. 2019, 6, 1–14. [Google Scholar] [CrossRef]
- Raj, N.S.; Renumol, V.G. A systematic literature review on adaptive content recommenders in personalized learning environments from 2015 to 2020. J. Comput. Educ. 2022, 9, 113–148. [Google Scholar] [CrossRef]
- Raj, N.S.; Renumol, V.G. An improved adaptive learning path recommendation model driven by real-time learning analytics. J. Comput. Educ. 2024, 11, 121–148. [Google Scholar] [CrossRef]
- Stefanutti, L.; de Chiusole, D.; Anselmi, P. On the polytomous generalization of knowledge space theory. J. Math. Psychol. 2020, 94, 102306. [Google Scholar] [CrossRef]
- Heller, J. Generalizing quasi-ordinal knowledge spaces to polytomous items. J. Math. Psychol. 2021, 101, 102515. [Google Scholar] [CrossRef]
- Sun, W.; Li, J.; Xu, B.; Wang, B. Well-graded polytomous knowledge structures. J. Math. Psychol. 2023, 114, 102770. [Google Scholar] [CrossRef]
- Wang, B.; Li, J. Exploring well-gradedness in polytomous knowledge structures. J. Math. Psychol. 2024, 119, 102840. [Google Scholar] [CrossRef]
- Mirsky, L. Transversal Theory: An Account of Some Aspects of Combinatorial Mathematics; Academic Press: New York, NY, USA, 1971. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).