1. Introduction
In their fundamental research paper, Hartman and Stampacchia [
1] proved that variational inequalities are useful mathematical tools that can be used to study various variational optimization or control real-life problems. Based on this article, Giannessi has stated important results and theoretical developments in this direction in [
2]. On the other hand, Moore [
3,
4] studied and developed interval analysis as an important mathematical object for studying various optimization problems generated by interval-valued objective/constraint functions or functionals. Stefanini and Bede [
5] developed this point of view by considering the generalized Hukuhara-type differentiability for interval-valued functions. Later, many authors have considered this idea in their studies, and we enumerate some of them here: Jayswal et al. [
6], Liu [
7], Treanţă [
8], Jayswal et al. [
9], and Zhang et al. [
10] (various theoretical results on vector variational problems and associated inequalities). Jha et al. [
11] studied a family of interval-valued optimization problems by employing the associated modified models and saddle point optimality criteria. In addition, Treanţă [
12,
13] formulated conditions of optimality and efficiency in various interval-valued extremization models. Guo et al. [
14], under generalized convexity, established new duality results and optimality conditions in interval-valued problems. For more information on this subject, we direct the reader to the following papers: Lodwick [
15], Hanson [
16], Antczak [
17], Myskova [
18], Wu [
19], Zhang et al. [
20,
21], Alefeld and Mayer [
22], Ishibuchi and Tanaka [
23], and Wu [
24]. Recently, Shang [
25] considered the resilient interval consensus problems for continuous-time time-varying multi-agent systems when a normal agent is surrounded by no more than
r misbehaving agents. Also, Shang [
26] investigated on interval consensus of switched multiagent systems.
Over the years, the concept of convex function/set has been extended to various notions, such as harmonic convexity [
27], quasi-convexity [
28], strong convexity [
29],
p-convexity [
30], or Schur-type convexity [
31]. As applications, a lot of researchers have studied multiple equalities and/or inequalities, such as the Agliardo–Nirenberg inequality [
32], Hardy-type inequality [
33], Ostrowski-type inequality [
34], and Olsen-type inequality [
35,
36,
37].
Motivated by the research work outlined above, the present paper studies and formulates new characterization theorems associated with a particular class of interval-valued minimization models. Specifically, we describe the set of solutions of the considered optimization problem involving mixed constraints by considering the set of solutions associated with a special class of split variational inequalities. Also, suitable numerical experiments are provided. Performing a comparative analysis with the studies already carried out in this direction, we can say that the present work is a natural continuation of the investigations developed in Treanţă and Saeed’s article [
38]. In their paper, the authors established certain relationships between the class of optimization problems considered here and a class of weak-type variational inequalities. In this study, we formulate new theorems to characterize the considered class of optimization problems (called
), using a new family of variational inequalities, namely the split variational inequalities (called
). More precisely, a first result establishes under which hypotheses a solution in
also becomes an optimal solution of the
type of
. The second theorem is reciprocal to the previous result. Since the functionals used in this paper are of curvilinear-type integrals, real-world applications are not a problem. As we all know, by considering path-independent curvilinear-type integrals, we can compute the mechanical work developed by a variable force to move its application point along a given piecewise smooth curve.
This paper continues as follows. In
Section 2, we present some ingredients on multi-dimensional variational control models that are useful for understanding the mathematical framework of this paper.
Section 3 contains the preliminary tools, with the auxiliary results, and formulates the problem under study.
Section 4 includes the principal results derived in this paper. Specifically, it provides some links and relations for the mentioned variational models, namely
and
.
Section 5 completes the theoretical developments with some numerical experiments. This paper ends with
Section 6, where the conclusions associated with this paper are highlighted.
2. On Multi-Dimensional Variational Control Models
Let us start with two complete Riemann manifolds, denoted by
and
, having dimensions
z and
n, respectively. Denote by
, the local coordinates on
, and by
, the local coordinates on
. By using the
product order relation on
, the hyper-parallelepiped
, with the diagonally opposite points
and
, can be written as the interval
. For
, which is a fixed natural number, let
be the
-th order jet bundle for
and
E, and let
be a
-class (piecewise) curve that links the points
and
. Consider the following path-independent curvilinear integral functionals:
determined by the (higher-order) closed Lagrange 1-form densities of
-class
with
with
,
,
The complete conditions of integrability for
are
where
denotes the operator of total derivative.
Also, we consider the following PDI, respectively, which is the PDE of evolution
determined by Lagrange-type matrix densities
We point out that in
, we have used the following rules:
for any two vectors
in
.
Using the space
endowed with the distance
where
is geodesic distance in
, we introduce the
set of all feasible solutions (domain)
for the following multi-dimensional multiobjective variational problem:
Note. Consider the constraints (or boundary conditions)
instead of
2.1. Necessary Optimality Conditions in Scalar Optimization Problems
We start by considering the following scalar optimization problem:
The necessary conditions for the optimality of
in
are
where
- ∘
is the total derivative operator of order
- ∘
, and
which shows that the multipliers satisfy that
is closed. Also, we accept the following notation:
- ∘
- ∘
represents the Saunders number (see Saunders [
39]).
Now, according to Valentine [
40], we reformulate the necessary optimality conditions mentioned above in
as follows:
Theorem 1. Suppose that is an optimal solution and , are of the -class. In these conditions, there are and , such that Definition 1 (Treanţă [
8]).
An optimal solution in is called a normal optimal solution in if . Definition 2 (Treanţă [
8]).
A point in is called an efficient solution if there exists no such that , with 2.2. Necessary Efficiency Conditions in
In order to develop an optimization theory on higher-order jet bundles, in accordance with Chankong and Haimes [
41], let us establish the following results:
Lemma 1. A feasible solution in is an efficient solution in if and only if is an optimal solution of , Lemma 2. Let be the optimal solution in . Under these assumptions, there are and satisfying Definition 3. The feasible solution is called a normal efficient solution of the problem if it is a normal optimal solution for at least one of the scalar problems .
Now, we have all the necessary mathematical tools to establish the next result.
Theorem 2. If is a [normal] efficient solution in , then there are and , verifying 3. Preliminaries
Consider and to be the classical Euclidean spaces, and to be a compact set. Also, we consider as a piecewise curve that links the points , , , and to be an arbitrary point in .
Denote , with , and consider the class of differentiable functions (piecewise state functions) , with , being the class of continuous functions (piecewise control functions) , and by which is the family of all compact real intervals.
For , the fololwing interval operations are considered:
if , then
.
In addition, for , we consider the -order, as follows:
.
Next, following Treanţă [
12], Ciontescu and Treanţă [
42], Saeed and Treanţă [
43], Treanţă and Saeed [
38], and Jayswal et al. [
44], we formulate the following auxiliary elements:
Definition 4. The functionalis named as the functional with interval values if it is written as follows:withas functionals with real values, and , satisfy the following inequality: Definition 5. The functional P is called path-independent if the associated real-valued functionals and are path-independent, or equivalently, if the conditionsandare fulfilled, for . Definition 6. The real-valued functionalis said to be (strictly) convex at if, for all , the relationis satisfied. The functional is (strictly) convex on if the definition given above is satisfied for each in .
Definition 7. The interval-valued functionalis called -convex at ifandare convex at . Definition 8. If and are convex at andoris strictly convex at , then the interval-valued functionalis said to be strictly -convex at . Next, we introduce and formulate the problem under study, as follows:where and are functions of -class. The set of feasible solutions for isand consider that it is a convex set of . Further, we consider the following notation: , and .
Definition 9. A pair is named as a (strong) optimal solution of the type of if, for all , inequalityis satisfied. In the following, we associate the next classes of controlled variational inequalities with :
- -
Find for which there exists no other satisfying - -
Find so that, for all feasible pairs , the following inequalities:
Some relations between the class of the above-mentioned weak variational inequalities
and the associated optimization model
are formulated and established in Treanţă and Saeed [
38]. For completeness of the exposition, we will recall these results as follows:
Theorem 3 (Treanţă and Saeed [
38]).
Consider to be an optimal solution of the type to and to be -convex at . Then, is a solution to . Theorem 4 (Treanţă and Saeed [
38]).
Consider to be a solution to and to be strictly -convex at . Then, is an optimal solution of the type to . 4. Main Results
The principal outcomes of this paper provide some links and relations for the mentioned variational models, namely and .
The next result establishes the hypotheses under which a solution in also becomes an optimal solution of the type of .
Theorem 5. Consider that fulfills and that is -convex at . Then, is also a strong optimal solution of the type to .
Proof. By hypothesis, the pair
solves the split variational control inequality
. In contrast, suppose that
is not a strong optimal solution of the
type to
. Thus, there exists
, fulfilling
equivalent with
By considering that the functional
is
-convex at
, we have
for all
. In agreement with the inequalities given in
, the above inequalities yield
which contradicts that
is a solution to
. □
The reciprocal of the previous theorem is satisfied under the conditions formulated by the next theorem.
Theorem 6. Consider to be a strong optimal solution of the type to and to be -convex at . Then, solves the inequality .
Proof. By hypothesis, we have that
is a strong optimal solution of the
type to
. In contrast, let us assume that
is not a solution of
. Thus, for
, the inequalities
hold. By considering the functional
to be
-convex at
, this results in
and
for all pairs
. In agreement with inequalities
and
, the above inequalities yield
for
. Equivalently, the inequality
holds, for
, which is a contradiction with the fact that
is a strong optimal solution of the
type of
. □
5. Numerical Applications
Let us consider the following optimization problem driven by interval-valued functionals:
with
being positive real parameters associated with problem
, and
.
For the above-considered problem, we denote
and the condition
leads to
. The convex subset of feasible solutions associated with
is defined as
From the conditions imposed on the problem
, we find
and
. Denoting
, the functionals
and
are convex at
. Thus, the condition of
-convexity from Theorem 5 is fulfilled. Also, the
at
for our problem becomes
For a control function
, by using the path independence of the involved functional, the condition returns to
meaning
With also being accomplished, according to Theorem 5, the solution becomes an optimal solution of the type.
For the second problem, let us consider
We consider
and, also, the feasible solution set is the same as for
. The condition
leads to
,
. The interval-valued functional
is
-convex at
. The
at
for problem
becomes
The following compatibility condition between parameters is obtained:
By using a control function
again, one obtains the condition
which, once fulfilled, enables
to become an optimal solution of the
type for the problem
.
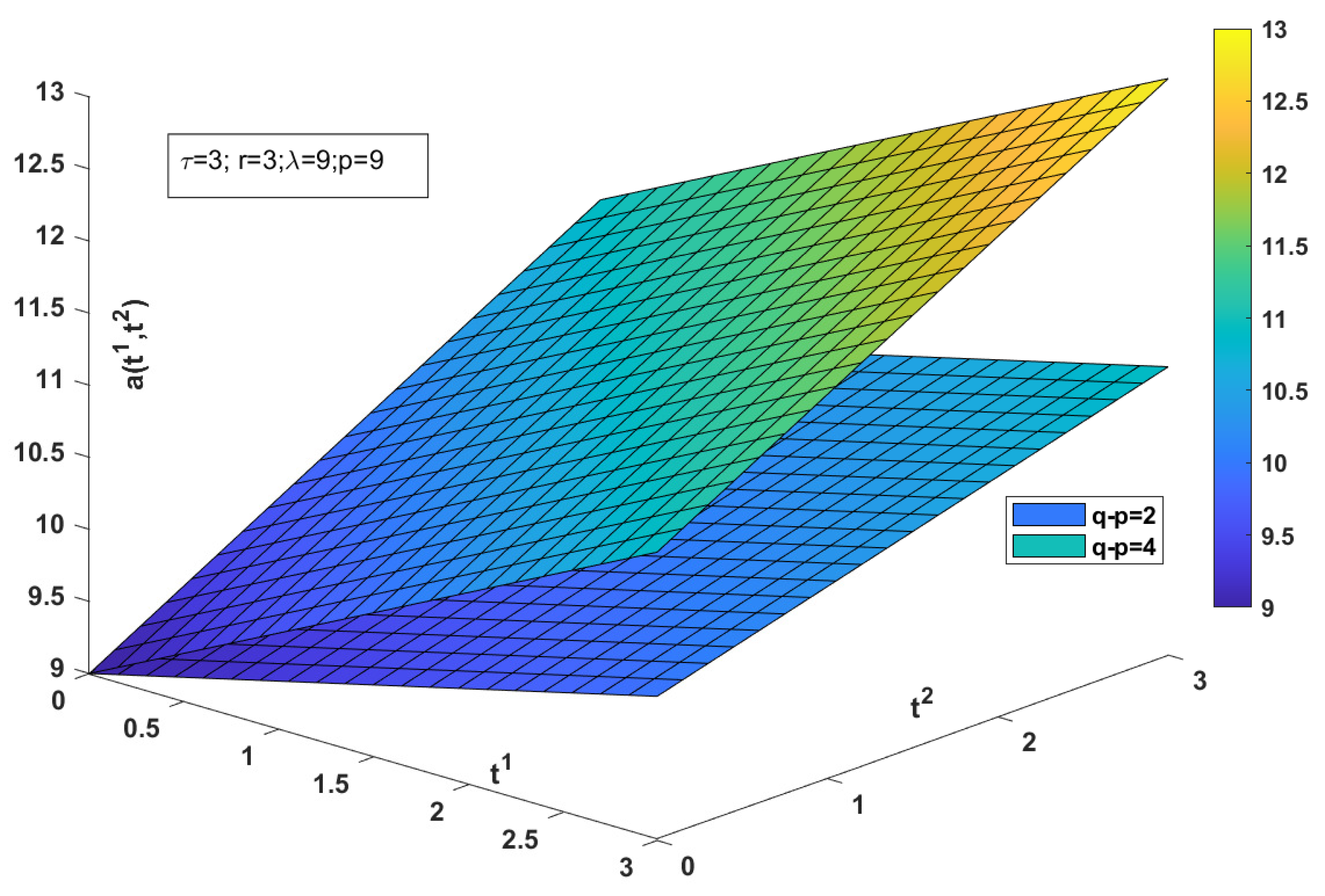
For the numerical case
with
and
, a graphical representation of the optimal solution is shown in
Figure 1. In this picture, we can see the variation of an optimal solution with the difference of fixed conditions. Specifically, we can notice the distance between the two surfaces, i.e., when the difference between the fixed conditions is smaller, (
) then the surface is positioned lower than when the difference of fixed conditions is greater (
). This means that for large variations in boundary conditions, we will obtain optimal surfaces that are located higher.
6. Conclusions
In this study, we formulated and proved some new results of the existence of solutions associated with a family of interval-valued minimization models. More precisely, we stated some characterization results on the set of solutions for the considered interval-valued minimization model by considering the solution set associated with some controlled split variational inequalities. These theoretical reciprocal results were also illustrated by suitable numerical experiments.
As further developments of the analysis provided in this study (that is, cases where -convexity fails to hold), we can mention the extension of the concept of -convexity to a more general one like -invexity and its various forms. In this way, this work will have greater applicability in various areas of science.
Author Contributions
Conceptualization, S.T. and O.M.A.; formal analysis, S.T. and O.M.A.; funding acquisition, S.T. and O.M.A.; investigation, S.T. and O.M.A.; methodology, S.T. and O.M.A.; validation, S.T. and O.M.A.; visualization, S.T. and O.M.A.; writing—original draft preparation, S.T. and O.M.A.; writing—review and editing, S.T. and O.M.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by TAIF University, TAIF, Saudi Arabia, project No. TU-DSPP-2024-258.
Data Availability Statement
The original data presented in this study are included in this article; further inquiries can be directed to the corresponding author.
Acknowledgments
The authors extend their appreciation to TAIF University, Saudi Arabia, for supporting this work through project No. TU-DSPP-2024-258.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Hartman, P.; Stampacchia, G. On some non-linear elliptic differential-functional equations. Acta Math. 1966, 115, 271–310. [Google Scholar] [CrossRef]
- Giannessi, F. Theorems of alternative, quadratic programs and complementarity problems. In Variational Inequalities and Complementarity Problems (Proc. Internat. School, Erice, 1978); Wiley: Chichester, UK, 1980; pp. 151–186. [Google Scholar]
- Moore, R.E. Interval Analysis; Prentice-Hall: Englandeood Cliffs, NJ, USA, 1966. [Google Scholar]
- Moore, R.E. Methods and Applications of Interval Analysis; SIAM Studies in Applied Mathematics 2; SIAM: Philadelphia, PA, USA, 1979. [Google Scholar]
- Stefanini, L.; Bede, B. Generalized Hukuhara differentiability of interval-valued functions and interval differential equations. Nonlinear Anal. 2009, 71, 1311–1328. [Google Scholar] [CrossRef]
- Jayswal, A.; Stancu-Minasian, I.M.; Ahmad, I. On sufficiency and duality for a class of interval-valued programming problems. Appl. Math. Comput. 2011, 218, 4119–4127. [Google Scholar] [CrossRef]
- Liu, Y. Variational Inequalities and Optimization Problems. Ph.D. Thesis, University of Liverpool, Liverpool, UK, 2015. [Google Scholar]
- Treanţă, S. On some vector variational inequalities and optimization problems. AIMS Math. 2022, 7, 14434–14443. [Google Scholar] [CrossRef]
- Jayswal, A.; Singh, S.; Kurdi, A. Multitime multiobjective variational problems and vector variational-like inequalities. Eur. J. Oper. Res. 2016, 254, 739–745. [Google Scholar] [CrossRef]
- Zhang, J.; Zheng, Q.; Ma, X.; Li, L. Relationships between interval-valued vector optimization problems and vector variational inequalities. Fuzzy Optim. Decis. Mak. 2016, 15, 33–55. [Google Scholar] [CrossRef]
- Jha, S.; Das, P.; Bandhyopadhyay, S. Characterization of LU-efficiency and saddle-point criteria for F-approximated multiobjective interval-valued variational problems. Res. Control Optim. 2021, 4, 100044. [Google Scholar]
- Treanţă, S. On a new class of interval-valued variational control problems. In Metric Fixed Point Theory; Springer: Berlin/Heidelberg, Germany, 2021; pp. 211–226. [Google Scholar]
- Treanţă, S. On a class of constrained interval-valued optimization problems governed by mechanical work cost functionals. J. Optim. Theory Appl. 2021, 188, 913–924. [Google Scholar] [CrossRef]
- Guo, Y.; Ye, G.; Liu, W.; Zhao, D.; Treanţă, S. Optimality conditions and duality for a class of generalized convex interval-valued optimization problems. Mathematics 2021, 9, 2979. [Google Scholar] [CrossRef]
- Lodwick, W.A. Interval and fuzzy analysis: A unified approach. Adv. Imaging Electron Phys. 2007, 142, 5–192. [Google Scholar]
- Hanson, M.A. Bounds for functionally convex optimal control problems. J. Math. Anal. Appl. 1964, 8, 84–89. [Google Scholar] [CrossRef]
- Antczak, T. Optimality conditions and duality results for nonsmooth vector optimization problems with the multiple interval-valued objective function. Acta Math. Sci. 2017, 37, 1133–1150. [Google Scholar] [CrossRef]
- Myskova, H. An iterative algorithm for testing solvability of max-min interval systems. Kybernetika 2012, 48, 879–889. [Google Scholar]
- Wu, H.C. The Karush-Kuhn-Tucker optimality conditions in an optimization problem with interval-valued objective function. Eur. J. Oper. Res. 2007, 176, 46–59. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, S.; Li, L.; Feng, Q. The KKT optimality conditions in a class of generalized convex optimization problems with an interval-valued objective function. Optim. Lett. 2014, 8, 607–631. [Google Scholar] [CrossRef]
- Zhang, C.; Huang, N.; O’Regan, D. On variational methods for interval-valued functions with some applications. Chaos Solitons Fractals 2023, 167, 113083. [Google Scholar] [CrossRef]
- Alefeld, G.; Mayer, G. Interval analysis: Theory and applications. J. Comput. Appl. Math. 2000, 121, 421–464. [Google Scholar] [CrossRef]
- Ishibuchi, H.; Tanaka, H. Multi-objective programming in optimization of the interval objective function. Eur. J. Oper. Res. 1990, 48, 219–225. [Google Scholar] [CrossRef]
- Wu, H.C. The Karush-Kuhn-Tucker optimality conditions in multiobjective programming problems with interval-valued objective functions. Eur. J. Oper. Res. 2009, 196, 49–60. [Google Scholar] [CrossRef]
- Shang, Y. Resilient interval consensus in robust networks. Int. J. Robust Nonlinear Control 2020, 30, 7783–7790. [Google Scholar] [CrossRef]
- Shang, Y. Interval consensus of switched multiagent systems. Int. J. Syst. Sci. 2022, 53, 351–362. [Google Scholar] [CrossRef]
- Awan, M.U.; Akhtar, N.; Iftikhar, S.; Noor, M.A.; Chu, Y.M. New Hermite-Hadamard type inequalities for n-polynomial harmonically convex functions. J. Inequalities Appl. 2020, 2020, 125. [Google Scholar] [CrossRef]
- Latif, M.A.; Rashi, S.; Dragomir, S.S.; Chu, Y.M. Hermite-Hadamard type inequalities for co-ordinated convex and quasi-convex functions and their applications. J. Inequalities Appl. 2019, 2019, 317. [Google Scholar] [CrossRef]
- Ullah, S.Z.; Khan, M.A.; Khan, Z.A.; Chu, Y.M. Integral majorization type inequalities for the functions in the sense of strong convexity. J. Funct. Space 2019, 2019, 9487823. [Google Scholar]
- Zhang, K.S.; Wan, J.P. p-convex functions and their properties. Pure Appl. Math. 2007, 23, 130–133. [Google Scholar]
- Chu, Y.M.; Wang, G.D.; Zhang, X.H. The Schur multiplicative and harmonic convexities of the complete symmetric function. Math. Nachrichten 2011, 284, 53–663. [Google Scholar] [CrossRef]
- Sawano, Y.; Wadade, H. On the Gagliardo-Nirenberg type inequality in the critical Sobolev-Orrey space. J. Fourier Anal. Appl. 2013, 19, 20–47. [Google Scholar] [CrossRef]
- Ciatti, P.; Cowling, M.G.; Ricci, F. Hardy and uncertainty inequalities on stratified Lie groups. Adv. Math. 2015, 277, 365–387. [Google Scholar] [CrossRef]
- Gavrea, B.; Gavrea, I. On some Ostrowski type inequalities. Gen. Math. 2010, 18, 33–44. [Google Scholar]
- Gunawan, H. Fractional integrals and generalized Olsen inequalities. Kyungpook Math. J. 2009, 49, 31–39. [Google Scholar] [CrossRef]
- Noor, M.A.; Noor, K.I.; Awan, M.U. Some quantum estimates for Hermite–Hadamard inequalities. Appl. Math. Comput. 2015, 251, 675–679. [Google Scholar] [CrossRef]
- Noor, M.A.; Noor, K.I.; Awan, M.U. Some quantum integral inequalities via preinvex functions. Appl. Math. Comput. 2015, 269, 242–251. [Google Scholar] [CrossRef]
- Treanţă, S.; Saeed, T. On Weak Variational Control Inequalities via Interval Analysis. Mathematics 2023, 11, 2177. [Google Scholar] [CrossRef]
- Saunders, D.J. The Geometry of Jet Bundles; London Math. Soc. Lecture Notes Series 142; Cambridge University Press: Cambridge, UK, 1989. [Google Scholar]
- Valentin, F.A. The problem of Lagrange with differentiable inequality as added side conditions. In Contributions to the Calculus of Variations; University of Chicago Press: Chicago, IL, USA, 1937; pp. 407–448. [Google Scholar]
- Chankong, V.; Haimes, Y.Y. Multiobjective Decision Making: Theory and Methodology; Courier Dover Publications: New York, NY, USA, 1983. [Google Scholar]
- Ciontescu, M.; Treanţă, S. On some connections between interval-valued variational control problems and the associated inequalities. Res. Control Optim. 2023, 12, 100300. [Google Scholar] [CrossRef]
- Saeed, T.; Treanţă, S. New classes of interval-valued variational problems and inequalities. Res. Control Optim. 2023, 13, 100324. [Google Scholar] [CrossRef]
- Jayswal, A.; Treanţă, S. Multi-Dimensional Control Problems: Robust Approach; Series ISSN: 2364-6837; Series E-ISSN: 2364-6845; Springer: Singapore, 2022. [Google Scholar]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).




{kind=link}