Abstract
This article deals with mathematical programs with vanishing constraints (MPVCs) involving lower semi-continuous functions. We introduce generalized Abadie constraint qualification (ACQ) and MPVC-ACQ in terms of directional convexificators and derive necessary KKT-type optimality conditions. We also derive sufficient conditions for global optimality for the MPVC under convexity utilizing directional convexificators. Further, we introduce a Wolfe-type dual model in terms of directional convexificators and derive duality results. The results are well illustrated by examples.
Keywords:
mathematical programs with vanishing constraints; directional convexificators; optimality conditions; constraint qualifications; generalized convexity MSC:
49J52; 90C25; 90C26; 90C30; 90C46
1. Introduction
Achtziger and Kanzow [1] initially proposed MPVC in 2008. Its roots are in optimization topology design problems related to mechanical structures. MPVC is widely used in several fields, like the robot motion planning problem [2], the economic dispatch problem [3], and nonlinear integer optimal control [4,5]. In solving MPVC, it is very difficult to satisfy standard constraint qualifications such as Mangasarian–Fromovitz constraint qualification (MFCQ) and linearly independent constraint qualification (LICQ), while Abadie constraint qualification (ACQ) is a very strong assumption for MPVC. MPVC is closely related to the class of mathematical programs with equilibrium constraints (MPECs) (see [6,7,8]). MPVC can always be formulated as an MPEC, but when solving the MPEC, this formulation presents certain difficulties because it violates the MPEC-type constraint qualifications. Thus, it is important to consider MPVC as an independent optimization problem. MPVC has garnered a lot of attention recently. Many authors have worked on MPVC with continuously differentiable functions (see [1,9,10,11,12,13,14,15]) and with nonsmooth functions (see [16,17,18]).
In 1994, Demyanov [19] introduced the notion of convexificators. Jeyakumar and Luc [20] proposed a revised version of convexificators comprising a closed set that is not necessarily bounded or convex. Several applications of convexificators are reported in [21,22,23,24,25,26,27,28]. By extending the notion of convexificators to a discontinuous case, Dempe and Pilecka [29] introduced the notion of directional convexificators based on the notion of continuity directions. Using directional convexificators, Gadhi et al. [30] established optimality conditions for a set-valued optimization problem. Using directional convexificators, Gadhi [31] developed Stampacchia and Minty variational inequalities of scalar optimization problems and used these inequalities to determine necessary and sufficient optimality conditions. Lafhim and Kalmoun [32] obtained optimality conditions for mathematical programs with equilibrium constraints using directional convexificators. For more applications of directional convexificators, we refer the reader to [33,34].
The concept of duality is very important in determining the lower bound of an objective function. Wolfe duality was introduced by Wolfe [35] for differentiable cases. Wolfe duality has also been studied in several fields, such as multiobjective programming problems [25], mathematical programs with vanishing constraints [12,36,37], mathematical programs with equilibrium constraints [24,38,39], semi-infinite programming [40,41], interval-valued programming [42,43,44,45,46,47], bilevel programming problems [48], etc.
Recently, Lafhim and Kalmoun [32] derived optimality conditions for mathematical programs with equilibrium constraints in terms of directional convexificators to also deal with nonsmooth discontinuous functions. Motivated by the work of Lafhim and Kalmoun [32], we wanted to develop analogous results for mathematical programs with vanishing constraints. Therefore, the main objective of this paper is to expand on the findings of Hu et al. [16] and the duality results of Mishra et al. [12] to include discontinuous functions with a nonempty set of continuity directions. Hence, we aim to establish optimality and duality theorems for mathematical programs with vanishing constraints in terms of directional convexificators that can tackle discontinuous functions with a nonempty set of continuity directions that cannot be handled by the results reported in [12,16]. As far as we are aware, no research has been conducted on mathematical programs with vanishing constraints in terms of directional convexificators for the purpose of resolving MPVCs with discontinuous functions. As such, this study represents an effort in this area.
The structure of our paper is summarized as follows. In Section 2, some basic definitions, preliminary information, and notations are provided. In Section 3, we introduce several stationary points under directional convexificators and nonsmooth Abadie constraint qualifications in terms of directional convexificators. Further, we derive the necessary optimality condition. We also obtain a sufficient optimality condition under the assumption of convexity in terms of directional convexificators. We illustrate the results with suitable examples. In Section 4, we present a Wolfe-type dual model in terms of directional convexificators and further report weak and strong duality results under the assumption of convexity using directional convexificators. In Section 5, we report the findings of this paper and discuss some future research possibilities.
2. Preliminaries
Let be a usual n-dimensional Euclidean space with a norm of . The convex hull and the closure of a nonempty subset (A) of are denoted by and , respectively, while represent the convex cone (containing the origin) generated by A. Let and be the non-negative orthant of the closed line segment between and the inner product, respectively. The set
denotes the negative polar cone, which is a nonempty, closed, and convex cone. We recall the following property from [49].
Let and be two closed and convex cones in ; then,
The cone of all feasible directions and the contingent cone or cone tangent to A at are expressed as follows [50]:
The cone normal to A at is defined by
The following proposition expresses the relation between a tangent cone and the cone of all feasible directions at a point of a locally star-shaped set. Recall that a set () is locally star-shaped at iff
Proposition 1
([51]). If is locally star-shaped at then
The lower and upper Dini directional derivatives are defined as follows:
Definition 1
([20]). Let be an extended real-valued function, and let be such that is finite. The lower and upper Dini derivatives of h at ζ in a direction are defined by
and
respectively.
The concept of continuity directions is very important for the subsequent analysis.
Definition 2
([29]). A vector is a continuity direction of at iff, for all sequences, with and we have
The set of all continuity directions of h at ζ is denoted by
The notion of directional convexificators is based on the notion of continuity directions.
Definition 3
([29]). Let D be a nonempty cone of . Let be the set of all continuity directions of h at The function admits
- (a)
- A directional upper convexificator at ζ iff such that the set () is closed, and for each one has
- (b)
- A directional lower convexificator at ζ iff such that the set () is closed, and for each one has
- (c)
- A directional convexificator at ζ iff it is both an upper and lower directional convexificator of h at
- (d)
- An upper regular directional convexificator of h at ζ iff such that the set () is closed, and for each one has
- (e)
- A lower regular directional convexificator of h at ζ iff such the set is closed, and for each one has
Remark 1.
The notion of directional convexificators merges with the notion of convexificators introduced in [20] when .
The following notion of convexity in terms of directional convexificators was introduced by Lafhim and Kalmoun [32].
Definition 4
([32]). Assume are such that has an upper regular directional convexificator and have a directional convexificator at The —tuple() is called convex at with respect to if for each there exists such that
Lemma 1
([32]). Assume that is a proper closed, convex cone that contains and is a bounded set such that
Then,
3. Problem Formulation and Optimality Conditions
In this section, we derive optimality conditions for nonsmooth mathematical programs with vanishing constraints involving discontinuous functions using directional convexificators.
3.1. Problem Formulation
We consider the following mathematical program with vanishing constraints (MPVC):
where and are the given functions may or may not be continuously differentiable.
The set of all feasible points of the MPVC is expressed as
For we define the following indices:
We denote the set of all continuity directions of at as respectively, and we let
Consider that all the functions have a directional upper convexificator at Therefore, we have the following notations:
Using the above notations, motivated by [32], we introduce Abadie-type constraint qualification (ACQ) for the MPVC using directional convexificators, which are very useful to derive further optimality conditions.
Definition 5.
Let and let all the functions associated with the MPVC (2) have directional upper convexificators at Then,
- (a)
- The generalized standard ACQ, denoted by —GS ACQ, is satisfied at iff
- (b)
- The generalized MPVC ACQ, denoted by —MPVC ACQ, is satisfied at iff
Remark 2.
Since —GS ACQ implies —MPVC ACQ. If all the involved functions are continuous, then —GS ACQ and —MPVC ACQ coincide with ([16], Definition 3.1) and ([16], Definition 3.2), respectively. If all the functions are continuously differentiable, then —GS ACQ and —MPVC ACQ coincide with ([1], p. 77) and ([1], Definition 3), respectively.
Now, we formulate an extended version of stationary points for MPVC in the context of directional convexificators by generalizing ([14], Definitions 6.1.12, 6.1.9 and 6.1.1) and ([16], Definitions 3.3, 3.5 and 3.6).
Definition 6.
A feasible point () of the MPVC is called a
- (a)
- —generalized weak stationary point (GW-stationary point) iff there are vectors ( and ) such that the following conditions hold:
- (b)
- (c)
Remark 3.
Since different stationary concepts for MPVC involving differentiable functions given in [14] are generalized to a nonsmooth case involving discontinuous functions in Definition 6, stationary points are called generalized stationary points. If all the involved functions are continuous, then these stationary concepts coincide with [16]. If all the functions are continuously differentiable, then these stationary concepts reduce to the stationary concepts defined in [14]. Directly from the definitions, we obtain following relationship between stationary points:
3.2. Necessary Optimality Conditions
Now, prove the following necessary optimality condition for a strong stationary point.
Theorem 1.
Let be a local minimizer of (2). Assume that f admits a bounded upper regular directional convexificator () at and that admit upper directional convexificators ( ) at Suppose that S is locally star-shaped at and that the following assertions hold true:
- (A1)
- is closed and convex;
- (A2)
- is closed;
- (A3)
If —GS ACQ holds at then is a —GS stationary point.
Proof.
Suppose that is a local minimizer of the MPVC, that is,
for some neighborhood (U) of
First, we show that
On the contrary, suppose that
Since f has an upper regular directional convexificator () at
Consequently, there exists a sufficiently small () such that and
Since this contradicts the local optimality of (8) holds true. Hence, for any one has
Now, from Proposition 1 and assumption we obtain
Since —GS ACQ holds at
Using Lemma 1, we have
Using the closure property of subsets A and B in ([32], Theorem 3.4), we conclude
Since f has a bounded upper regular directional convexificator at , co is compact and assumption () holds,
Thus, there exist non-negative multipliers ( ) such that
We set , and Then, we find that is a —GS-stationary point. □
Remark 4.
We can see that if f is continuous at that is, then assumptions () and () are trivially satisfied, and Theorem 1 reduces to ([16], Theorem 3.1). If all the functions are continuously differentiable, then Theorem 1 reduces to ([1], Theorem 1).
We illustrate Theorem 1 using the following example.
Example 1.
Consider the following two-dimension MPVC problem:
where
and
It is obvious that is a global optimum solution of the above problem, and we have
Now, we can derive the following directional convexificators at
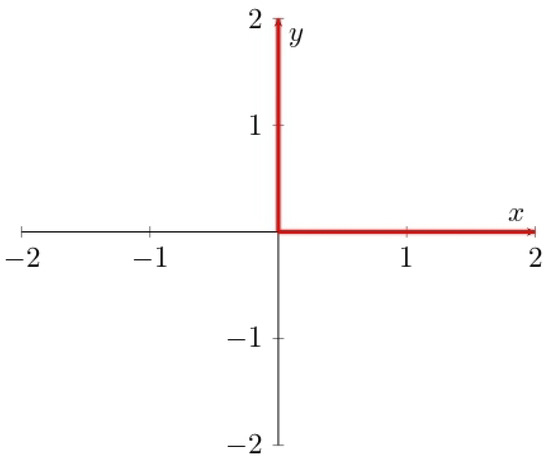
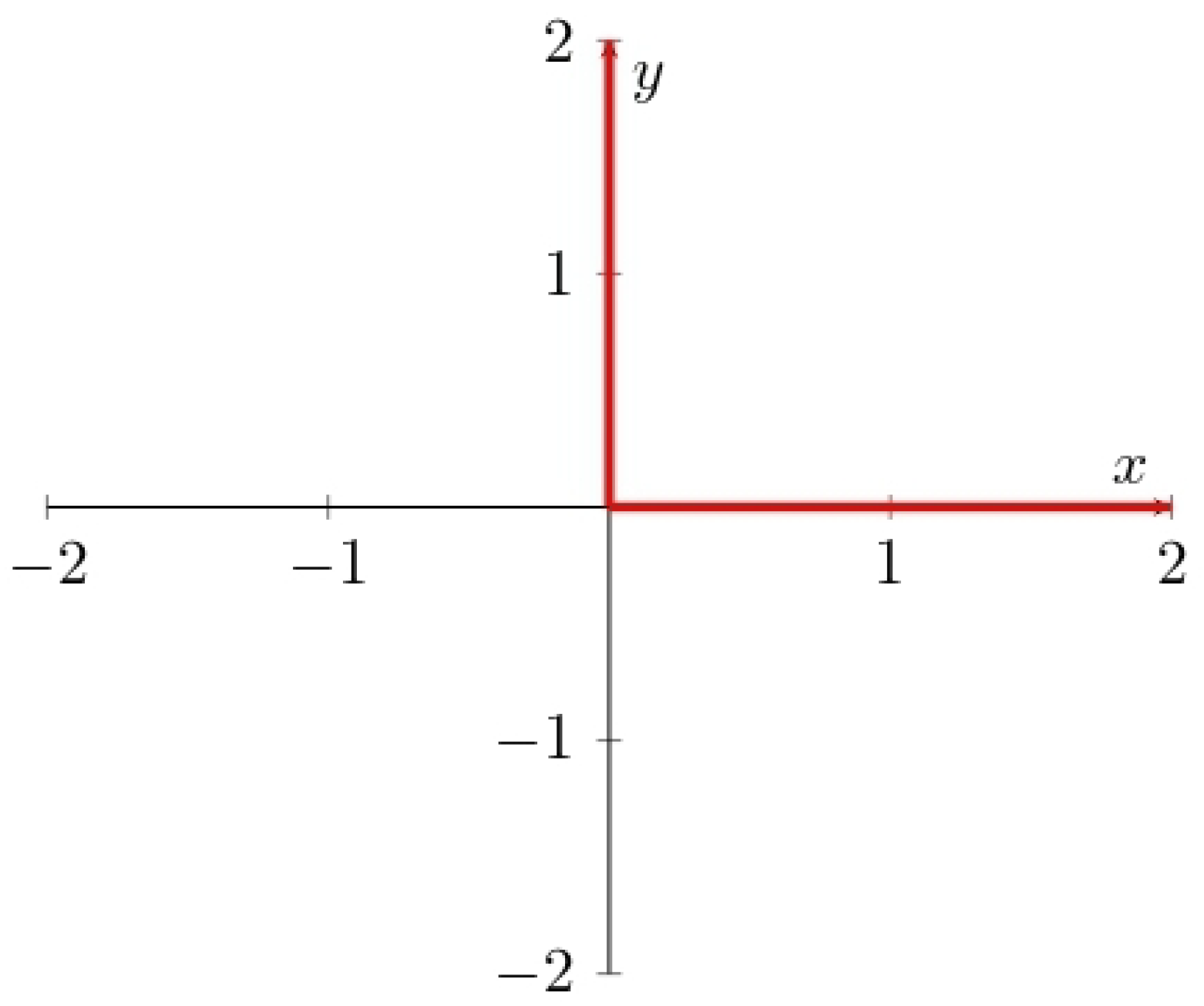
where is upper regular. The feasible set of the problem is
which is shown in Figure 1.
Figure 1.
The red lines represent both the feasible region and the tangent cone of Example 1.
The set
The negative polar cone of is
We can see that
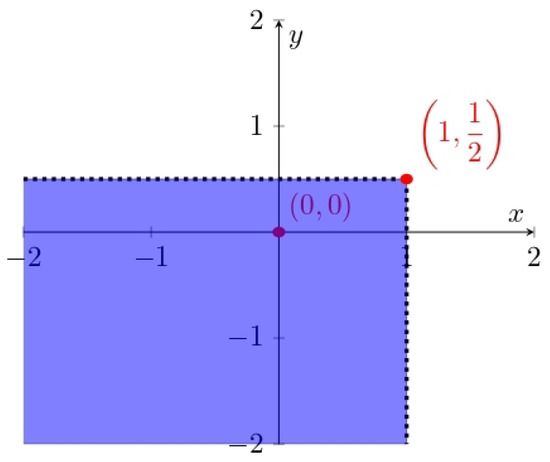
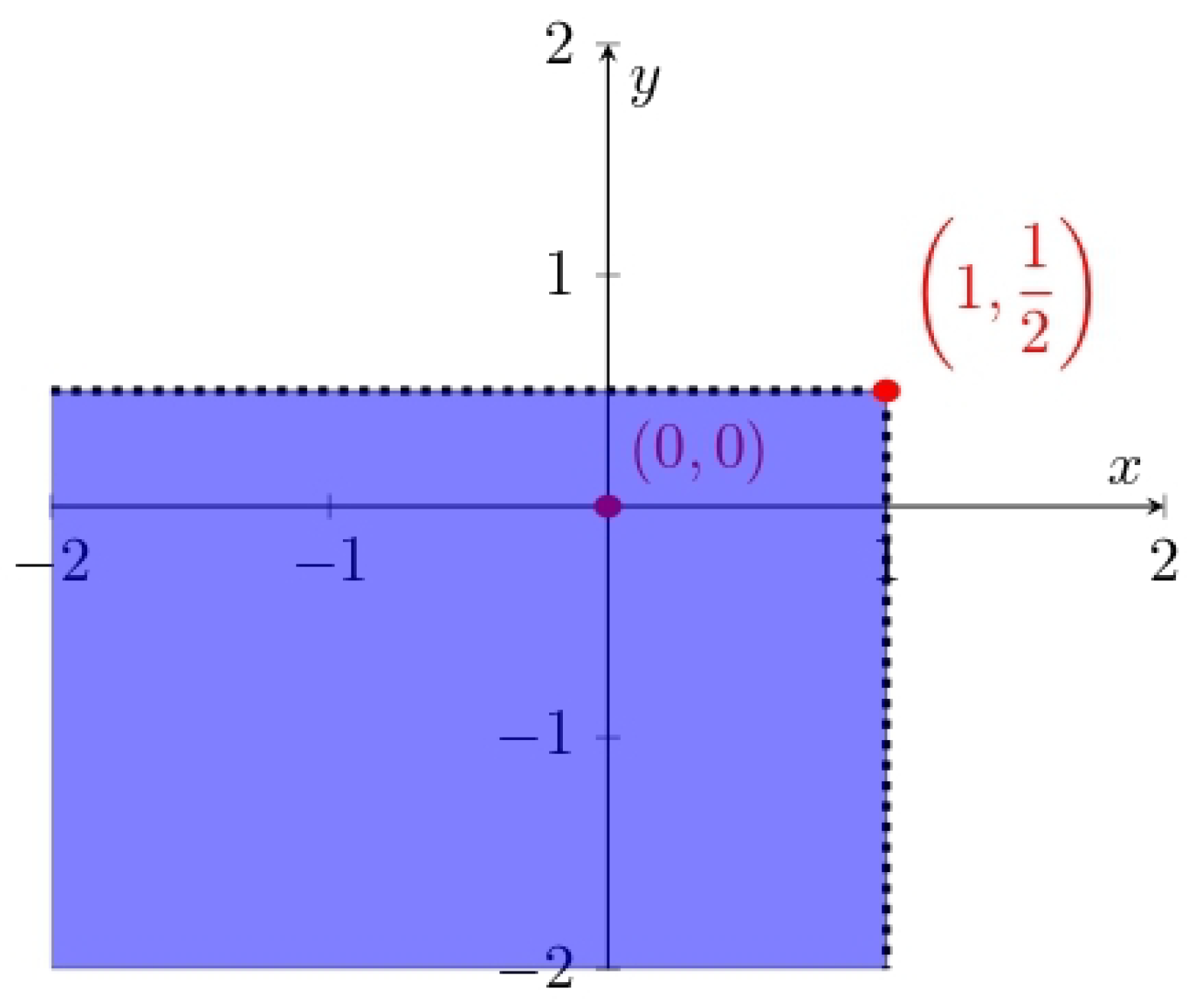
Also, Now, it is clear that and cone is closed. Then, there exist and such that
as shown in Figure 2.
Figure 2.
The set obtained by inclusion (11) containing the origin with and .
Since —ACQ may not always be satisfied at an optimal point, we derive the following result under a weaker condition of —MPVC-ACQ to identify —GM-stationary points.
Theorem 2.
Assume that all the conditions of Theorem 1 hold, except assertion () is replaced by and is closed. If —MPVC-ACQ holds at then is a —GM stationary point.
Proof.
The proof of the above theorem is the same as that of Theorem 1. Since is a local minimizer of MPVC,
On the other hand, —MPVC ACQ at implies
Now, according to Lemma 1 and property (1),
We know that cone is closed, and is compact; therefore, one has
This implies that there exist non-negative multipliers ( ) such that
Let , and according to which we obtain
Thus, is a —GM stationary point. □
Next, we provide an example that illustrates the above theorem. We can see that —MPVC-ACQ holds but not —ACQ.
Example 2.
Consider the following two-dimensional MPVC problem:
where
It is obvious that is the global optimum solution of the above problem; therefore, we have
Now, we can propose the following directional convexificators at
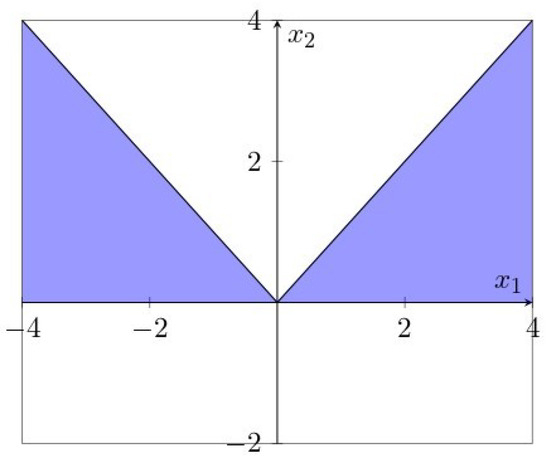
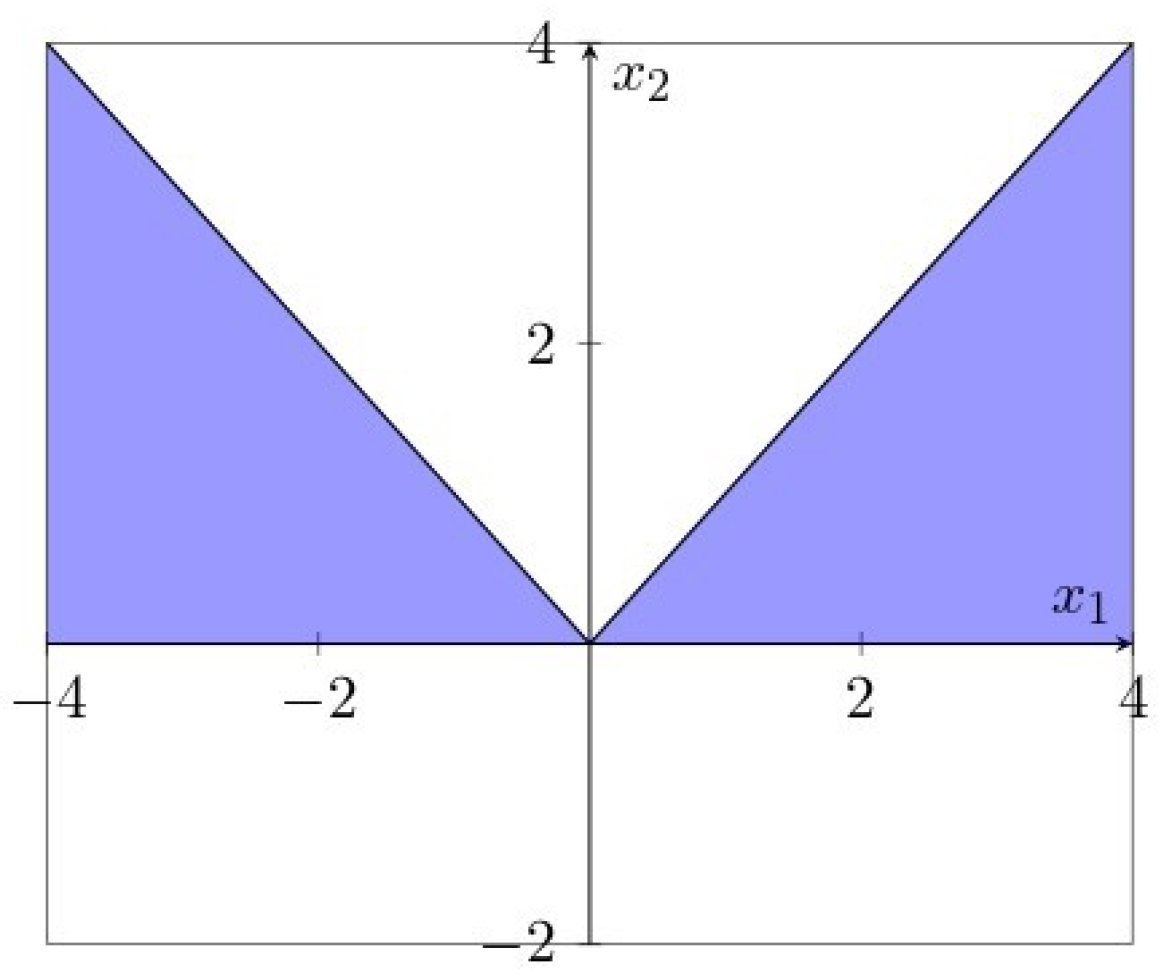
where is upper regular. The feasible set of the problem is
as shown in Figure 3.
Figure 3.
Blue represents both the feasible region and the tangent cone of Example 2.
The negative polar cones of and are
respectively. We can see that
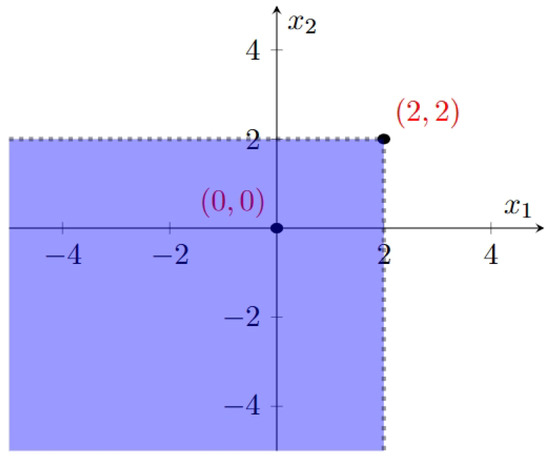
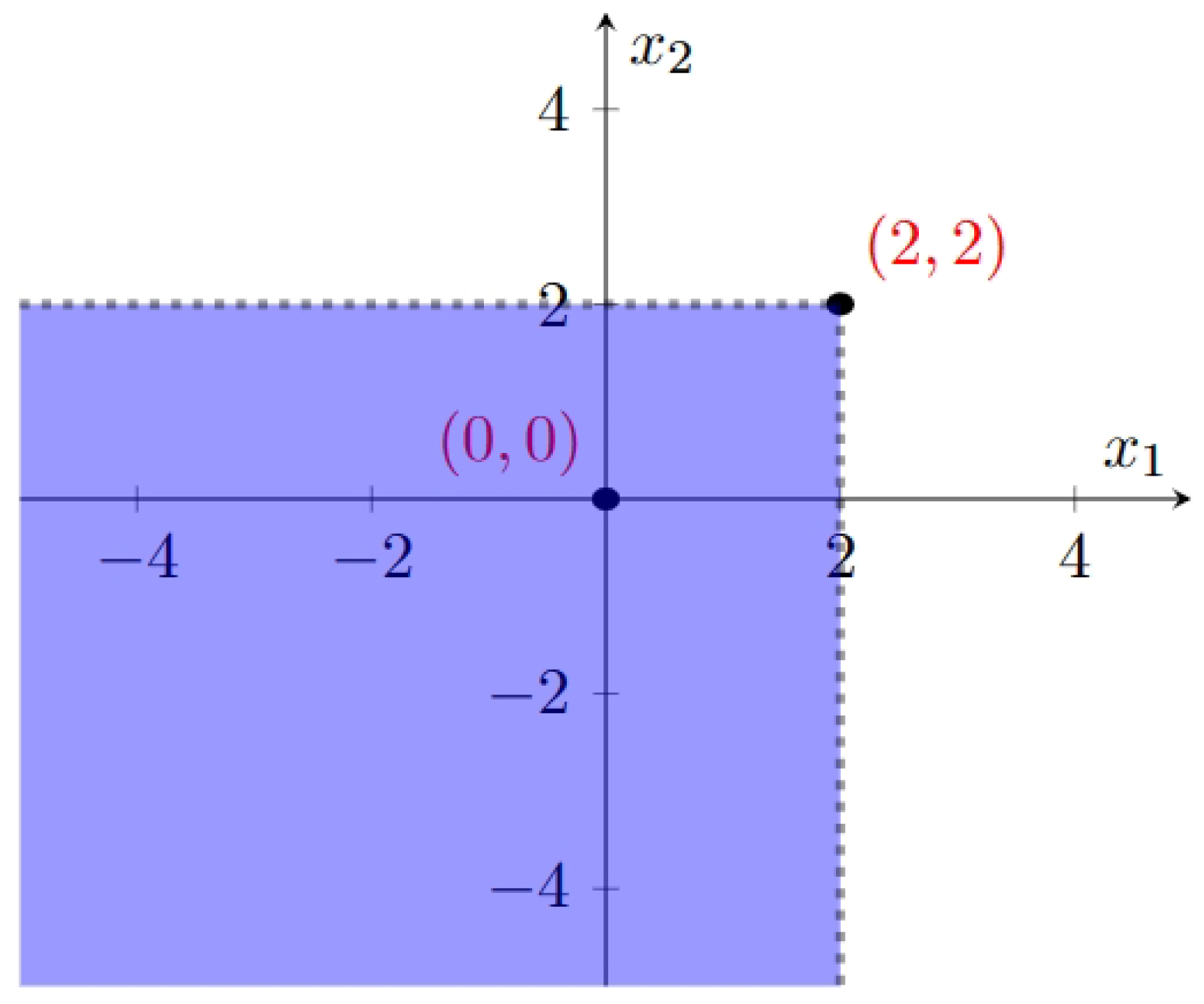
Now, it is clear that but
Consequently, —MPVC ACQ holds at but —GS-ACQ does not hold at
Figure 4.
The set obtained by inclusion (14) containing the origin with .
3.3. Sufficient Optimality Condition
Now, we establish the following sufficient optimality conditions using the concept of generalized convexity. We define the following index sets:
Theorem 3.
Let be a —GW-stationary point of (2) and suppose that is —convex at with respect to If then is a global optimal solution of the MPVC.
Proof.
On the contrary, assume that is not a global optimal solution of the MPVC. Thus, there exists a point () such that
Since is —convex at with respect to for all there exists such that
By multiplying both sides of the inequalities (17)–(20) by positive scalars and and adding (16) to (20), we obtain
Since taking into account the —GW-stationarity of one obtains
Using the definition of polar cone, it follows from that
Thus, according to (21),
Since
This contradicts our assumption; hence, is a global optimal solution. □
4. Duality
In this section, we formulate a Wolfe-type dual model for MPVC (2) using directional convexificators. Now, we present the following Wolfe-type dual (WD) to MPVC (2) depending on a feasible point () denoted by VC-WD:
subject to:
where the indices are defined by the expression (15), and are expressed as
and
The set of all feasible points of —VC-WD is denoted by The projection of set on is denoted by and is defined as follows:
Now, we consider another duality problem that is independent of the primal (2), denoted by —VC-WD, which is defined as follows:
subject to:
The set of all feasible points of —VC-WD is denoted by
Remark 5.
If all the involved functions are continuously differentiable, then the above dual models coincide with the models defined in [12] (Section 3). If all the continuity directions are , then we have a dual model in terms of convexificators. In addition, if all the the functions are locally Lipschitz, then we have a dual model in terms of Clarke subdifferentials, as studied in [36].
Example 3.
Consider the primal MPVC of Example 1. The directional convexificators of the involved functions at are given in (17). For the dual model is expressed as
subject to:
and
where and
Example 4.
Consider the primal MPVC of Example 2. The directional convexificators of the involved functions at are given in (13). For the dual model is expressed as
subject to
and
where and
The following theorem is a weak duality theorem that expresses the relationship between a feasible point of the primal problem and a feasible point of the corresponding Wolfe-type dual problem.
Theorem 4
(Weak duality theorem). Let and Suppose that f admits a bounded upper regular directional convexificator and the constraint functions admit upper directional convexificators at If is convex at with respect to then
Proof.
According to the feasibility of MPVC (2) and VC-WD and the convexity of at with respect to then for all there exists such that
which implies that
By using duality constraint (22) of the VC-WD, we have
Using the definition of polar cone for
□
Next, we propose a strong duality theorem.
Theorem 5
(Strong duality theorem). Let be a local minimizer of MPVC (2). Suppose that f admits a bounded upper regular directional convexificator and constraint functions admit upper directional convexificators at Assume that is —convex at with respect to Furthermore, suppose that S is star-shaped at and assertions hold. If -ACQ holds at then there exist Lagrange multipliers () such that is a feasible point of VC-WD Then, is a global optimal solution of the dual VC-WD, and the respective objective values are equal.
Proof.
Since is a local minimizer of problem (2), assertions , and hold, and —ACQ holds at Then, according to Theorem 1, it follows that there exist Lagrange multipliers () such that conditions (3)–(5) and (7) hold. Then, is a feasible point of the VC-WD, and
Furthermore, according to Theorem 4, we obtain
Hence, is a global maximum of the VC-WD, and the respective objective values are equal. □
Now, we illustrate Theorems 4 and 5 in the following example.
Example 5.
Consider the primal MPVC of Example 1. The point is a local minimizer of the MPVC. Its dual model (VC-WD) is given in Example 3. We can easily see that , and , as well as -ACQ, hold. According to Theorem 5, there exist Lagrange multipliers () such that is a feasible point of the VC-WD and
Furthermore, since the weak duality between MPVC (2) and the VC-WD () holds as in Theorem 4, according to Theorem 5, is a global maximum of the VC-WD(), and the respective objective values are equal.
5. Conclusions
In this study, we focused on nonsmooth mathematical programs with vanishing constraints involving functions without the necessity of being continuous. The idea of directional convexificators is the main tool used in our proofs. We established several nonsmooth stationary conditions and proposed standard and MPVC Abadie constraint qualifications based on this novel concept. We derived necessary optimality conditions under generalized Abadie constraint qualifications. We proposed sufficient optimality conditions in terms of directional convexificators under generalized convexity. Lastly, we proposed a Wolfe-type dual model for MPVC and a weak duality theorem and strong duality theorem using directional convexificators. The results reported in this paper extend several results previously reported in literature [1,12,13,14,16,36].
It is generally known that under general nonlinear constraints, there is no feasible method that can be defined that always reaches global minimizers of the problem. It is not feasible to provide even local minimizers, at least not when convexity is not taken into account. Finding an acceptable stationary point—that is, a computable point exhibiting essential minimizer properties—is the goal of practical algorithms. In this regard, the Karush–Kuhn–Tucker (KKT) conditions are the most crucial instrument for characterizing minimizers of a problem. They have been specialized or adjusted to several specific situations, such as multi-objective optimization and nonsmooth optimization, among others, and are used to state the theoretical convergence of almost every approach in restricted optimization. In addition, KKT conditions provide useful stopping criteria for various algorithms. Since in MPVC, the standard constraint qualifications are not satisfied and stationary conditions differ due to nonlinear reformulations, the results reported in this paper are not only useful to locate local minimizers but also to provide stopping criteria for various algorithms. Moreover, they are useful in tackling nonsmooth discontinuous functions with nonempty sets of continuity directions at a stationary point using directional convexificators.
In future research, we can extend the results reported by Laha and Dwivedi [22] for interval-valued optimization problems to lower semi-continuous cases using directional convexificators and the saddle-point criteria proposed by Jaiswal and Laha [25] for multiobjective optimizations to lower semi-continuous cases. Some other dual models for primal MPVC (2), like the Mond–Weir-type dual model and mixed-type dual models, may be introduced by using directional convexificators. It will also be interesting to explore the impact of the results on the problem; each nonconvex domain (or function) can be presented as a limit of the difference between two sequences of convex domains (or functions). These are some possible extensions of our results.
Author Contributions
Conceptualization, R.N.M. and V.L.; methodology, P.S.; validation, R.N.M., V.L. and P.S.; formal analysis, P.S.; investigation, P.S.; original draft preparation, P.S.; review and editing, R.N.M.; visualization, V.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Acknowledgments
We are extremely thankful to all the referees of this article for their careful reading of the paper and for their valuable comments to improve the presentation of the paper in its present form. We are also grateful to the editors for their invaluable help and support in handling the paper.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Achtziger, W.; Kanzow, C. Mathematical programs with vanishing constraints: Optimality conditions and constraint qualifications. Math. Program. 2008, 114, 69–99. [Google Scholar] [CrossRef]
- Kirches, C.; Potschka, A.; Bock, H.G.; Sager, S. A Parametric Active Set Method for Quadratic Programs with Vanishing Constraints. Technical Report. 2012. Available online: https://mathopt.de/PUBLICATIONS/Kirches2011.pdf (accessed on 1 June 2024).
- Jabr, R.A. Solution to economic dispatching with disjoint feasible regions via semidefinite programming. IEEE Trans. Power Syst. 2011, 27, 572–573. [Google Scholar] [CrossRef]
- Jung, M.N.; Kirches, C.; Sager, S. On perspective functions and vanishing constraints in mixed-integer nonlinear optimal control. In Facets of Combinatorial Optimization: Festschrift for Martin Grötschel; Jünger, M., Reinelt, G., Eds.; Publishing House: Berlin/Heidelberg, Germany, 2013; pp. 387–417. [Google Scholar]
- Palagachev, K.; Gerdts, M. Mathematical programs with blocks of vanishing constraints arising in discretized mixed-integer optimal control problems. Set-Valued Var. Anal. 2015, 23, 149–167. [Google Scholar] [CrossRef]
- Luo, Z.Q.; Pang, J.S.; Ralph, D. Mathematical Programs with Equilibrium Constraints; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Outrata, J.; Kocvara, M.; Zowe, J. Nonsmooth Approach to Optimization Problems with Equilibrium Constraints: Theory, Applications and Numerical Results; Springer Science & Business Media: Dordrecht, The Netherlands, 2013. [Google Scholar]
- Laha, V.; Singh, H.N. On quasidifferentiable mathematical programs with equilibrium constraints. Comput. Manag. Sci. 2023, 20, 30. [Google Scholar] [CrossRef]
- Hoheisel, T.; Kanzow, C. First-and second-order optimality conditions for mathematical programs with vanishing constraints. Appl. Math. 2007, 52, 495–514. [Google Scholar] [CrossRef]
- Hoheisel, T.; Kanzow, C. On the Abadie and Guignard constraint qualifications for mathematical programmes with vanishing constraints. Optimization 2009, 58, 431–448. [Google Scholar] [CrossRef]
- Hoheisel, T.; Kanzow, C.; Outrata, J.V. Exact penalty results for mathematical programs with vanishing constraints. Nonlinear Anal. Theory Methods Appl. 2010, 72, 2514–2526. [Google Scholar] [CrossRef]
- Mishra, S.K.; Singh, V.; Laha, V. On duality for mathematical programs with vanishing constraints. Ann. Oper. Res. 2016, 243, 249–272. [Google Scholar] [CrossRef]
- Mishra, S.K.; Singh, V.; Laha, V.; Mohapatra, R.N. On constraint qualifications for multiobjective optimization problems with vanishing constraints. In Optimization Methods, Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2015; pp. 95–135. [Google Scholar]
- Hoheisel, T. Mathematical Programs with Vanishing Constraints; Universität Würzburg: Würzburg, Germany, 2009. [Google Scholar]
- Laha, V.; Kumar, R.; Singh, H.N.; Mishra, S.K. On minimax programming with vanishing constraints. In Optimization, Variational Analysis and Applications: IFSOVAA-2020, Varanasi, India, February 2–4; Springer: Singapore, 2021; pp. 247–263. [Google Scholar]
- Hu, Q.; Zhou, Z.; Chen, Y. Some convexificators-based optimality conditions for nonsmooth mathematical program with vanishing constraints. Am. J. Oper. Res. 2021, 11, 324–337. [Google Scholar] [CrossRef]
- Van Su, T.; Hang, D.D. Optimality conditions and duality theorems for nonsmooth semi-infinite interval-valued mathematical programs with vanishing constraints. Comput. Appl. Math. 2022, 41, 422. [Google Scholar] [CrossRef]
- Sadeghieh, A.; Kanzi, N.; Caristi, G. On stationarity for nonsmooth multiobjective problems with vanishing constraints. J. Glob. Optim. 2022, 82, 929–949. [Google Scholar] [CrossRef]
- Demyanov, V. Convexification and concavification of positively homogeneous functions by the same family of linear functions. Report 1994, 3, 802. [Google Scholar]
- Jeyakumar, V.; Luc, D.T. Nonsmooth calculus, minimality, and monotonicity of convexificators. J. Optim. Theory Appl. 1999, 101, 599–621. [Google Scholar] [CrossRef]
- Golestani, M.; Nobakhtian, S. Convexificators and strong Kuhn–Tucker conditions. Comput. Math. Appl. 2012, 64, 550–557. [Google Scholar] [CrossRef]
- Laha, V.; Dwivedi, A. On approximate strong KKT points of nonsmooth interval-valued mutiobjective optimization problems using convexificators. J. Anal. 2024, 32, 219–242. [Google Scholar] [CrossRef]
- Laha, V.; Mishra, S.K. On vector optimization problems and vector variational inequalities using convexificators. Optimization 2017, 66, 1837–1850. [Google Scholar] [CrossRef]
- Pandey, Y.; Mishra, S.K. Duality for nonsmooth optimization problems with equilibrium constraints, using convexificators. J. Optim. Theory Appl. 2016, 171, 694–707. [Google Scholar] [CrossRef]
- Jaisawal, P.; Laha, V. On sufficiency and duality for multiobjective programming problems using convexificators. Filomat 2022, 36, 3119–3139. [Google Scholar] [CrossRef]
- Pany, G.; Mohapatra, R.N. A study on vector variational-like inequalities using convexificators and application to its bi-level form. J. Ind. Manag. Optim. 2022, 6, 4333–4350. [Google Scholar] [CrossRef]
- Mishra, S.K.; Kumar, R.; Laha, V.; Maurya, J.K. Optimality and duality for semidefinite multiobjective programming programs using convexificators. J. Appl. Numer. Optim. 2022, 4, 103–118. [Google Scholar]
- Upadhyay, B.B.; Mishra, P.; Mohapatra, R.N.; Mishra, S.K. On the applications of nonsmooth vector optimization problems to solve generalized vector variational inequalities using convexificators. In World Congress on Global Optimization; Springer International Publishing: Cham, Switzerland, 2019; pp. 660–671. [Google Scholar]
- Dempe, S.; Pilecka, M. Necessary optimality conditions for optimistic bilevel programming problems using set-valued programming. J. Glob. Optim. 2015, 61, 769–788. [Google Scholar] [CrossRef]
- Gadhi, N.A.; Rahou, F.Z.; El Idrissi, M.; Lafhim, L. Optimality conditions of a set valued optimization problem with the help of directional convexificators. Optimization 2021, 70, 575–590. [Google Scholar] [CrossRef]
- Gadhi, N.A. On variational inequalities using directional convexificators. Optimization 2021, 71, 2891–2905. [Google Scholar] [CrossRef]
- Lafhim, L.; Kalmoun, E.M. Optimality conditions for mathematical programs with equilibrium constraints using directional convexificators. Optimization 2023, 72, 1363–1383. [Google Scholar] [CrossRef]
- El Idrissi, M.; Gadhi, N.A.; Ohda, M. Applying directional upper semi-regular convexificators in bilevel optimization. Optimization 2022, 72, 3045–3062. [Google Scholar] [CrossRef]
- Gadhi, N.A.; Ohda, M. Optimality conditions for MPECs in terms of directional upper convexifactors. RAIRO-Oper. Res. 2022, 56, 4303–4316. [Google Scholar] [CrossRef]
- Wolfe, P. A duality theorem for nonlinear programming. Q. J. Appl Math. 1961, 19, 239–244. [Google Scholar] [CrossRef]
- Fallahi, K.; Ghobadzadeh, M. Wolfe type duality for nonsmooth optimization problems with vanishing constraints. J. Math. Ext. 2021, 16, 1. [Google Scholar]
- Joshi, B.C. Mathematical programs with vanishing constraints involving strongly invex functions. Numer. Algorithms 2022, 91, 505–530. [Google Scholar] [CrossRef]
- Guo, L.; Lin, G.H.; Zhao, J. Wolfe-type duality for mathematical programs with equilibrium constraints. Acta Math. Appl. Sin. Engl. Ser. 2019, 35, 532–540. [Google Scholar] [CrossRef]
- Pandey, Y.; Mishra, S.K. Optimality conditions and duality for semi-infinite mathematical programming problems with equilibrium constraints, using convexificators. Ann. Oper. Res. 2018, 269, 549–564. [Google Scholar] [CrossRef]
- Mishra, S.K.; Jaiswal, M.; An, L.T.H. Duality for nonsmooth semi-infinite programming problems. Optim. Lett. 2021, 6, 261–271. [Google Scholar] [CrossRef]
- Tung, L.T. Karush-Kuhn-Tucker optimality conditions and duality for multiobjective semi-infinite programming via tangential subdifferentials. Numer. Funct. Anal. Optim. 2020, 41, 659–684. [Google Scholar] [CrossRef]
- Wu, H.C. Duality theory for optimization problems with interval-valued objective functions. J. Optim. Theory Appl. 2010, 144, 615–628. [Google Scholar] [CrossRef]
- Singh, D.; Dar, B.A.; Kim, D.S. Sufficiency and duality in non-smooth interval valued programming problems. J. Ind. Manag. Optim. 2019, 15, 647–665. [Google Scholar] [CrossRef]
- Van Su, T.; Dinh, D.H. Duality results for interval-valued pseudoconvex optimization problem with equilibrium constraints with applications. Comput. Appl. Math. 2020, 39, 127. [Google Scholar] [CrossRef]
- Jayswal, A.; Stancu-Minasian, I.; Banerjee, J. Optimality conditions and duality for interval-valued optimization problems using convexifactors. Rend. Circ. Mat. Palermo 2016, 65, 17–32. [Google Scholar] [CrossRef]
- Van Luu, D.; Mai, T.T. Optimality and duality in constrained interval-valued optimization. 4OR 2018, 16, 311–337. [Google Scholar] [CrossRef]
- Lai, K.K.; Mishra, S.K.; Hassan, M.; Bisht, J.; Maurya, J.K. Duality results for interval-valued semiinfinite optimization problems with equilibrium constraints using convexificators. J. Inequal. Appl. 2022, 2022, 128. [Google Scholar] [CrossRef]
- Van Su, T.; Hang, D.D.; Dieu, N.C. Optimality conditions and duality in terms of convexificators for multiobjective bilevel programming problem with equilibrium constraints. Comput. Appl. Math. 2021, 40, 37. [Google Scholar] [CrossRef]
- Schirotzek, W. Nonsmooth Analysis; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Bazaraa, M.S.; Sherali, H.D.; Shetty, C.M. Nonlinear Programming: Theory and Algorithms; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Kabgani, A.; Soleimani-Damaneh, M. Constraint qualifications and optimality conditions in nonsmooth locally star-shaped optimization using convexificators. Pac. J. Optim. 2019, 15, 399–413. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).