1. Introduction
The study of the supply–demand network equilibrium models has been the subject of great interest due to their theoretical challenges and practical application. The fundamental principle is Wardrop’s equilibrium principle [
1], which states that users in transport networks choose one of the paths among all the paths joining the same origin–destination (OD) pair at minimum cost. After Wardrop, many scholars have proposed various network equilibrium models based on a single criterion. Dong et al. [
2] considered a supply chain network equilibrium model with random demands. Meng et al. [
3] proposed a note on supply chain network equilibrium models. Nagurney [
4] presented a supply chain network equilibrium model and investigated the relationship between transportation and supply chain network equilibria. Nagurney et al. [
5] developed an equilibrium model of a competitive supply chain network. Additionally, motivated by practical concerns, network equilibrium models based on multiple criteria cost functions have been studied; for example, Chen and Yen [
6] were the first to propose a traffic network equilibrium model based on multiple criteria cost functions without capacity constraints, and present an equivalent relation between vector network equilibrium models and vector variational inequalities. Cheng and Wu [
7] presented a multi-product supply–demand network equilibrium model with multiple criteria.
For a supply–demand network, it is well known that when the flows pass through two different paths which contain common arcs at the same time, the capacity constraints of the two paths may interact. So, the capacity constraints are important factors that affect the equilibrium states and the selection of the set of feasible network flows. Based on this cause, a substantial number of works have been devoted to studying the vector equilibrium principle [
5,
8,
9,
10,
11,
12,
13,
14] with capacity constraints of paths. In addition, considering that the data are uncertain in practice and are not known exactly, along with the change of network users’ demand preferences and the fluctuation of purchasing power, the demands of network flow should not be fixed, and the network equilibrium with uncertain demands have attracted much attention. Very recently, Cao et al. [
15] focused on the traffic network equilibrium problem with uncertain demands, in which the uncertain set consisted of finite discrete scenarios. Subsequently, Wei et al. [
16] assumed that the demands belonged to a closed interval and proposed (weak) vector equilibrium principles involving a single product. Proper efficiency is widely applied to solve vector optimization and vector equilibrium problems. It can help one to eliminate some abnormal efficient decisions and provide proper efficient decisions. Several classical proper efficiency measures, such as Benson efficiency [
17], super efficiency [
18], and Henig efficiency [
19], have been applied to solve network equilibrium models. Cheng and Fu [
20] introduced a kind of proper efficiency–strict efficiency, and it has been used to solve vector optimization models (for example, see Yu et al. [
21]). On the other hand, variational inequality theory is an effective tool to solve equilibrium problems (for example, see Chen and Yen [
6]).
In this paper, inspired by the work in [
7,
10,
16,
17], we consider strict vector equilibrium principles of a multi-product, multi-criteria supply–demand network with capacity constraints and uncertain demands, where the demands are assumed to belong to a closed interval and are irrelevant to the costs for all OD pairs. The main contribution is to derive the existence results of strict vector equilibrium flows of a multi-product supply–demand network with capacity constraints and uncertain demands by virtue of the Fan–Browder fixed point theorem and obtain the relations between the strict vector equilibrium flows and vector variational inequalities, with both a single criterion and multi-criteria cost functions, which, to the best of our knowledge have not been studied before.
The rest of this article is arranged as follows: in
Section 2, some mathematical preliminaries are described. In
Section 3, we propose a strict network equilibrium principle for a multi-product supply–demand network problem involving real-valued cost functions with capacity constraints and uncertain demands. The equivalence relation between the strict network equilibrium flow and the strictly efficient solution of variational inequalities is established. The existence of the strict network equilibrium flows is also derived by means of the Fan–Browder fixed point theorem.
Section 4 proposes a strict network equilibrium principle for a multi-product supply–demand network problem with capacity constraints and uncertain demands involving vector-valued cost functions, and the similar equivalence relation of strict network equilibrium flows in terms of vector variational inequalities is deduced by using Gerstewitz’s scalarization function.
Section 5 gives an illustrative example.
Section 6 provides a brief summary of the paper.
2. Definition and Preliminaries
In this section, some notations are set and we recall the notions of efficient points of a nonempty set, and the variational inequality and strictly efficient points of a nonempty set. Throughout the paper, we suppose that the vectors are always row vectors unless otherwise stated. Let
be the
n-dimensional Euclidean space and
be its non-negative orthant. Let
be the
matrix space and
be its non-negative orthant, where
denotes the transpose of the matrix
. Given
, let
represent the multiplication of matrix
y and
z. A pointed closed convex cone
induces the orderings in
: for any
,
where
denotes the nonempty interior of
. For convenience of writing, let
. Let
be a nonempty convex subset of the cone
and
be its closure.
is the conic hull of the set
. If
,
, then the set
is said to be a base of the cone
.
Let N be a nonempty subset of X; is a mapping. The notion of efficient points of the set N is as follows.
Definition 1 (see [
21])
. A vector is said to be an efficient point of the set N ifLet EP(N) denote the set of the efficient points of the set N.
The variational inequality is to find a vector
, such that
The concept of strictly efficient points of the set N is as follows.
Definition 2 (see [
21])
. Suppose that is a base of Γ. The vector is called a strictly efficient point of the set N with if there is a neighborhood of 0, such thatLet SEP(N) denote the set of strictly efficient points of the set N.
3. Existence of Strict Vector Equilibrium Flows with Single Criterion
For a supply–demand network
, let
, and
denote the set of nodes, the set of arcs, the set of OD pairs, and the uncertain demand vectors, respectively. Let us suppose that there are
m different kinds of products passing through the network and that a typical product is denoted by
o. For each arc
and product
o,
represents arc flow of product
o between two different nodes.
denotes the capacity vector, where
implies the capacity of arc
c for the product
o. The arc flow
needs to satisfy the following capacity constraint:
Let us assume that there are
s OD pairs in the set
. The available paths connecting OD pair
form the set
, and let
, where
n is a positive integer. For each acyclic path
, we denote by
the path flow of the product
o on path
a. The relation between arc flows and path flows is as follows:
where
Let us suppose that
and
are the lower and upper capacity constraints on path
a with product
o, respectively, i.e.,
The matrix is called a network flow. Thus, each column vector of the matrix is the flow on path a, while the row vector is the network flow with product o.
We denote demand vectors of the network flow by
, where the component
denotes the uncertain demand for OD pair
p and product
o. Let us suppose that
belongs to a closed interval
, i.e.,
, where
represents an appropriate fixed demand and
denotes a deviation. It is reasonable to assume that the values of
and
that depend on
p and
o are different for each OD pair and product in practical supply–demand network problems. We would like to point out that the uncertain demand
that is irrelevant to the costs is significantly different from the one introduced in [
12,
22].
We say that the network flow
satisfies the uncertain demands constraint if and only if
A network flow
satisfying both the capacity constraints and the uncertain demands constraints is called a feasible flow. The set of all feasible flows is denoted by
Let
. Clearly,
Q is closed, convex, and compact.
For each product
o, let
be the cost function on arc
c; the cost function on path
is computed by
The cost on the network is given as a form of matrix
, where the
ath column
represents the cost on path
a; the
oth row
represents the cost on the network with product
o. In this paper, unless otherwise stated, we always assume that for any
and
,
which has been also used in the literature [
7].
Definition 3. Supposing a flow ,
- (i)
for an arc and product , if , then c is called a saturated arc of product o and flow ϱ, or a nonsaturated arc of product o and flow ϱ.
- (ii)
for a path and product , if the path a contains a saturated arc c of product o and flow ϱ, then a is called a saturated path of product o and flow ϱ, otherwise, a nonsaturated path of product o and flow ϱ.
In the following content, we propose the concept of strict network equilibrium flow for a kind of multi-product supply–demand network involving real-valued cost functions with capacity constraints and uncertain demands, which has not been studied in the existing literature. In what follows, we always assume that is a base of , is a base of , is a neighborhood of 0 in , and is a neighborhood of 0 in .
Definition 4. (Strict network equilibrium principle). A feasible network flow is a strict network equilibrium flow, if, for each , , , there is a neighborhood Θ of 0 in satisfying , one has as an implication, , or , or path a is a saturated path with product o and flow ϱ. Now, let us review the concept of the strict efficiency of vector variational inequalities, which will be employed to derive the main conclusions.
Definition 5. A flow is said to be a strictly efficient solution of the vector variational inequality if and only if there exist and satisfying , It is noteworthy that the vector
is a strictly efficient solution of the following variational inequality:
if the vector
is a solution of the following variational inequality: find
, satisfying
Next, we shall consider the relations between a strictly efficient solution of the vector variational inequality and the strict network equilibrium flow.
Theorem 1. If the vector is a strict network equilibrium flow, then ϱ is a strictly efficient solution of the following variational inequality: find , satisfying Proof. If the vector
is a strict network equilibrium flow, for each
,
,
, it has the following implication:
,
, or
, or path
a is a saturated path of product
o and flow
.
Because
is an
matrix, the component is
,
; so,
is also an
matrix, the component is
,
. Let
Hence, for each
,
It follows from Definition 4 that for any
,
and
,
,
, or path
is a saturated path of product
o and flow
. Because
, we obtain
that is,
Due to
, one has
So there is an
such that
Because
, we have
,
for each
,
And, because
, it holds that
. Due to
, there must exist
satisfying
. Hence, we obtain
Since
and
, we obtain that
Therefore, there exist
and
, satisfying
Thus, inequation (
1) holds.
Next, let
Therefore, there must be an
satisfying
We set
, where
,
because of
. Hence,
. Thus there are
and
satisfying
. Therefore, there are
and
satisfying
, which is equivalent to
which contradicts (
1). Hence, it holds that
□
Theorem 2. The vector is a strict network equilibrium flow if ϱ is a solution of the following vector variational inequality: find satisfying Proof. Assume that
satisfies inequality (
2). For each
and
,
,
, if
, and
a is a nonsaturated path of product
o and flow
, we will deduce
or
. Let
. We assume that the conclusion is false, i.e.,
or
. Taking
and
, let
be
Because
, i.e.,
,
,
, one has
We know that
is an
matrix; the component is
,
. If
, then for each
,
with strict inequality holding for some
. By
, one has
that is,
which is equivalent to
By Equations (
3) and (
4) and
, we obtain
a contradiction. Thus, the conclusion
or
holds. □
We now propose the existence of strict network equilibrium flow by virtue of an equivalent form of Fan–Browder’s fixed point theorem ([
23,
24]), which is formulated in the following lemma.
Lemma 1 (see [
10])
. Let ℧ denote a Hausdorff topological vector space; is a nonempty compact convex subset of ℧. Assume that the set-valued map has the following conditions:- (i)
for any , is a convex set;
- (ii)
for any , ;
- (iii)
for any , is an open set in .
Then, there exists satisfying .
Theorem 3. Consider a multi-product supply–demand network equilibrium problem with capacity constraints and uncertain demands . Let be given. If, for any , the function is continuous on Q. Then, the network exists as a strict vector equilibrium flow.
Proof. Consider the following variational inequality: find
satisfying
Firstly, we will show that the variational inequality (
5) admits a solution. We define a set-valued map
as
. Then, one has the following results:
- (i)
is convex;
- (ii)
for each , ;
- (iii)
if
, one has
, which implies that there exists a
such that
. Since
is continuous on
Q by hypothesis, one can reach that there exists an open neighborhood
of
such that
which implies that
i.e.,
is open.
By Lemma 1, we obtain that the variational inequality (
5) has a solution
. Next, we prove that
is a strict network equilibrium flow. According to Theorem 2, we needs to prove that
is a solution to the following vector variational inequality:
Let us suppose to the contrary that
is not a solution; then, there is
, such that
. For
, we obtain
a contradiction. □
4. Strict Vector Equilibrium Flows with Multi-Criteria via Scalarization
It seems unreasonable for network users to choose a path based on a single criterion. In fact, the network users need to consider time, tariffs, fuel, and other relevant cost factors simultaneously. That is, the cost function is a multi-criteria one. In the following sections, the equilibrium model of the multi-product supply–demand network
based on multi-criteria cost functions is investigated. Let us suppose that the cost on arc
with product
o is:
, where
is a positive integer. The cost on the path
,
with product
o is computed by
Hence,
and we set it in the form
where
,
.
The cost on the network concerning product o is denoted by , the cost on path a is denoted by , and the cost of the network is denoted by .
In the following, is a e-dimensional Euclidean space with the ordering cone , where is a positive integer. always denotes a base of , and denotes a neighborhood of 0 in . Firstly, we introduce the concept of strict network equilibrium flow for a multi-product, multi-criteria supply–demand network with capacity constraints and uncertain demands.
Definition 6. The feasible network flow is called a strict network equilibrium flow for a multi-product, multi-criteria supply–demand network with capacity constraints and uncertain demands, if, for any , , , there is a neighborhood of 0 in , such that , one has the implication, , or , or path a is a saturated path of product o and flow ϱ. As we all know, a viable approach to solve vector problems is to convert them into scalar problems. In this paper, we use the following nonlinear scalarization function (i.e., Gerstewitz’s function) to scalarize the vector-valued strict network equilibrium flows without any assumptions about convexity.
Definition 7 (see [
25])
. For a given , let be defined by Lemma 2 and Lemma 3 provide some properties of the above function that we will use in the proof of Theorem 4.
Lemma 2 (see [
26])
. Let . For each and , one has- (i)
- (ii)
- (iii)
- (iv)
- (v)
where is the topological boundary of .
Lemma 3 (see [
7])
. Given , , and , one hasand We denote
for any
,
,
,
;
and
Definition 8. The feasible network flow is called in -strict vector equilibrium for a multi-product supply–demand network involving vector-valued cost functions, if, for any , , , there exist and a neighborhood Θ of 0 in satisfying , one has the implication, , or , or path a is a saturated path of product o and flow ϱ. Now, we will scalarize strict vector equilibrium problems for a multi-product supply–demand network involving vector-valued cost functions.
Theorem 4. Let us suppose that is defined as in (6) for each , , and . The feasible network flow is a strict network equilibrium flow for a multi-product, multi-criteria supply–demand network with capacity constraints and uncertain demands if and only if ϱ is in -strict vector equilibrium. Proof. Necessity: suppose that
is a strict network equilibrium flow for a multi-product, multi-criteria supply–demand network with capacity constraints and uncertain demands. For any
,
and
, it is necessary to verify the following implication:
,
, or
, or path
a is a saturated path of product
o and flow
.
Firstly, it holds that
implies
Indeed, from
, we have
From (
6), one has
, where
,
. By Lemma 3, it holds that
Therefore,
turns into
That is,
. Due to
, so
, that is,
Let us suppose that
there is a
satisfying
. We set
, where
,
. Because
, there exist
and
satisfying
. So
,
. Hence, there are
,
satisfying
equivalently,
i.e.,
It follows from Lemma 2 that
By (
6) and Lemma 3, one has
i.e.,
If
,
, so
, which contradicts
and
. Hence,
which leads to a contradiction with (
7). Therefore, one has the implication:
Since
is a strict network equilibrium flow, for any
,
,
, one has
,
, or
, or path
a is a saturated path of product
o and flow
. Hence, we obtain that
,
, or
, or path
a is a saturated path of product
o and flow
, for any
,
and
.
Sufficiency: assume that
is in
-strict vector equilibrium for a multi-product supply–demand network involving vector-valued cost functions. We first verify the implication
The following is similar to the proof of necessity. There is a
satisfying
. Therefore, there are
and
satisfying
i.e.,
Together (
6) with Lemma 3, one has
Hence, it holds that
If
,
, which leads to a contradiction with
and
. Therefore,
Because
, then
. Therefore,
, i.e.,
which leads to a contradiction with (
8). Hence, it holds that
Additionally, due to , one has . It follows from Definition 8 that , , or , or path a is a saturated path of product o and flow , for any , and . Therefore, is a strict network equilibrium flow for a multi-product, multi-criteria supply–demand network with capacity constraints and uncertain demands. This completes the proof. □
It should be noted that the relations among strict network equilibrium flows involving real-valued cost functions,
-strict vector equilibrium flows, and vector variational inequalities have been investigated in Theorems 1, 2, and 4. Then, strict network equilibrium flows for a multi-product supply–demand network involving vector-valued cost functions can be replaced by the following corresponding vector variational inequality: find
satisfying
Additionally, it was shown in [
7] (see Theorem 3.2 and Theorem 3.3) that the variational inequality (
9) is equivalent to the following variational inequality: find
satisfying
These approaches allow us to obtain strict network equilibrium flows for a multi-product supply–demand network involving vector-valued cost functions.
5. An Illustrative Example
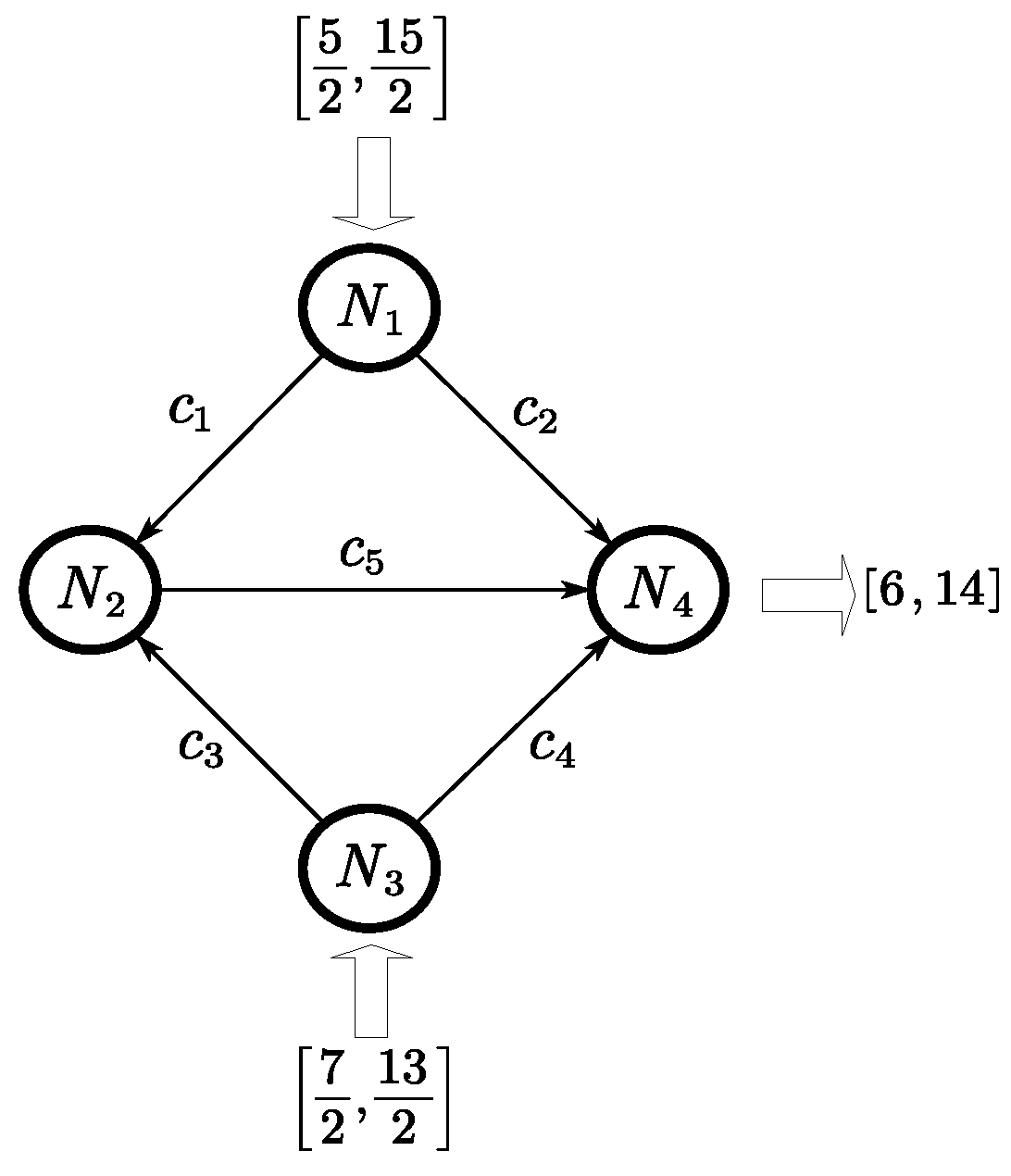
In this section, an example is provided to demonstrate the application of the obtained theoretical results. The example has the network topology depicted in
Figure 1.
Table 1 summarizes the constituent paths of each OD pair.
The network consists of four nodes:
and five arcs:
. We assume that
,
,
,
, and
, where
,
,
,
, then
,
. Let
and
. The costs on each arc are chosen as follows:
By a direct calculation, we derive the costs on four different paths:
Setting
. Obviously,
is a feasible network flow. Thus,
Now, we verify that the feasible flow
is a strict vector equilibrium flow. For OD pairs
,
, we choose
and
; it holds that
and
Since the arc flow
is
it follows from Definition 3 that arc
is a saturated arc of flow
, paths 3 and 5 are saturated paths of flow
. Hence, by Definition 6, we obtain that
is a strict vector equilibrium flow.
Next, we show that
is a solution of the following variational inequality:
We take
; it is obvious that
. Direct computation shows that
Therefore, the strict vector equilibrium flow
is a solution of variational inequality (
10).






{kind=link}