Abstract
This paper investigates the dynamics of non-autonomous cooperative systems of difference equations with asymptotically constant coefficients. We are mainly interested in global attractivity results for such systems and the application of such results to evolutionary population cooperation models. We use two methods to extend the global attractivity results for autonomous cooperative systems to related non-autonomous cooperative systems which appear in recent problems in evolutionary dynamics.
Keywords:
cooperative; difference equations; discrete dynamical systems; evolutionary dynamics; non-autonomous systems; stability MSC:
39A22; 39A30; 39A60
1. Introduction and Preliminaries
In this paper, we give some global attractivity results for a non-autonomous cooperative systems of difference equations
where f and g are non-decreasing in both variables. Here, and are sequences which are assumed to be asymptotically constant. Our results are motivated by some results for global attractivity for non-autonomous systems of difference equation via linearization in [1] that has significant applications in mathematical biology of single species [2,3]. Our techniques are based on difference inequalities and non-standard linearization methods, which were major tools used in [1,3]. Some other techniques were used in several other papers and books [4,5,6,7].
Here, we extend the applications from single species models in [3] to the case of several (mainly two) species cooperation models. Then, we apply our results to evolutionary population cooperation models, which have been considered lately by Cushing, Elaydi and others, see [8,9,10,11,12,13]. Some of the results presented here can be extended to multidimensional cooperative systems. The obtained results hold when the limiting system of difference equations is in the hyperbolic case and can not be extended to the non-hyperbolic case.
There are many reasons that model parameters can change over time, such as periodic changes in environment or evolution. We will shortly describe an effect of Darwinian evolution here, as is given in [14]. A detailed explanation is given in a series of papers by J. Cushing [9,10,11,12] as well as in the book of Vincent and Brown [15]. Suppose v is a quantified phenotypic trait of an individual that is subject to evolution. If we assume the per capita contribution to the population made by an individual depends on its trait v, then the transition function in the population dynamics discrete equation of Kolmogorov type depends on both x and v. If this transition function also depends on the traits of other individuals, we can model this situation by assuming that f also depends on the mean trait u in the population so that . A canonical way to model Darwinian evolution is to model the dynamics of and the mean trait by means of the population dynamic equation of Kolmogorov type
and another equation that describes the dynamics of the trait:
where , see [15].
Equation (3) (called Lande’s or Fisher’s or the breeder’s equation) [16,17] prescribes that the change in the mean trait is proportional to the fitness gradient, where fitness in this model is denoted by . An appropriate measure of fitness is often taken to be f or . The constant of proportionality is called the speed of evolution. It is related to the variance of the trait in the population, which is assumed constant in time. When evolution occurs, then and the model is a two-dimensional system of difference equations with state variable .
The global attractivity result for the first-order autonomous difference equation that will be used in simulations in this paper is Theorem 1.18 in [18]. Some related results were proved by Elaydi and Sacker [19] and Singer [20] and are listed in [14].
In this paper, we will use the so-called “north-east” partial ordering of the space defined in the following way:
and the so-called “south-east” partial ordering of the space defined by
The extension of north-east ordering to n-dimensional systems and maps is straightforward.
In this paper, we use two methods to derive the global attractivity results: the method of difference inequalities and the method of non-standard linearization. The map , is called a cooperative map if the functions are nondecreasing functions in all variables. We used the method of difference inequalities to prove some global attractivity results for two-dimensional competitive systems in [14]. However, the results in [14] are two-dimensional and it is not clear how to extend them to k-dimensional case for . As we have shown in [3], the method of difference inequalities produced excellent global attractivity results in the case of non-autonomous first-order difference equations of both Kolmogorov type (such as Equation (2)) and non-Kolmogorov type, which includes higher order equations such as second order equation
where the functions are nondecreasing functions and are convergent sequences. If are continuous functions and and the limiting equation
has a globally asymptotically stable equilibrium , then for every solution of non-autonomous Equation (4), provided that Equation (5) is structurally stable. Structural stability of the limiting equation is necessary to prevent non-hyperbolic dynamics from emerging, in which case the dynamic of a non-autonomous system could be quite complicated. See [3] for examples of dynamics in non-hyperbolic cases. See also [21,22,23,24] for some other techniques for proving global attractivity. The examples of non-autonomous Kolmogorov maps are of interest for evolutionary dynamics and global attractivity results are derived for such maps as well.
Section 2.2 contains some global attractivity results for cooperative systems based on the method of non-standard linearization used in [3]. This method, which is heuristic, requires a system of difference equations to be written in linearized form as
where , in general, depends on n and the state variables . If , then
This method is inapplicable for competitive systems.
Theorems 1 and 2 are based on a well-known method of difference inequalities or method of upper and lower solutions and give a simple tool to extend global attractivity results from autonomous cooperative systems to related non-autonomous systems, in the case of almost constant coefficients, see [19,25,26].
Theorems 3, Corollaries 1 and 2 and Theorem 4 are based on the method of non-standard linearization from [3] and are applicable to a more general class of systems than cooperatives. Such systems have potential for applications as all functions are of Beverton–Holt type.
Theorem 6 is of some importance as it presents the global dynamics of a nontrivial autonomous cooperative system with great potential for applications since all transition functions are of Beverton–Holt type. The global dynamics of this autonomous cooperative system are simple and can be described as an exchange of stability bifurcation. The technique of the proof is geometric in nature and is innovative. By using Theorem 5 we extend this result to the related non-autonomous cooperative system.
Finally, we are interested in global attractivity since this is the property of governing difference equations which is of greatest importance in Darwinian (evolutionary) dynamics. Another important property is the periodic behavior of solutions when the environment is periodic, but this case is considered in other papers.
2. Main Results
In this section, we present our main results on the stability of certain non-autonomous systems.
2.1. Global Attractivity of Some Cooperative Discrete Dynamical Systems via Difference Inequalities
The proof of the following lemma is by simple induction and will be omitted. It can be found in [25,26] and can be extended to cooperative maps in n-dimensional space, where north-east partial ordering is defined in a natural way.
Lemma 1.
Assume that
- (a)
- is a cooperative map.
- (b)
- ,, are sequences of the real components in such that and
Then,
An immediate application of Lemma 1 is the following result.
Theorem 1.
Consider the non-autonomous system of difference equations
where is a cooperative map and
Assume that there exists such that for every , with
all the solutions of the system
converges to a constant solution Additionally, suppose that Then, every solution of the system (6) converges to .
Proof.
According to (7), for any , there exists such that for the following holds
This implies that
By Lemma 1 we obtain
where satisfies
and satisfies
By using (9) we have that
i.e.,
where . Since , where , (10) implies that the sequence is convergent and that
□
Remark 1.
Example 1.
The following system of difference equations modeling cooperation was considered in [27] and in [2]
for all positive values of parameters except and . When then is a non-increasing sequence and so is convergent to 0, which is the only limiting point. In that case, the second equation implies that there exists M such that for , which imlies that and so . Thus . The case is similar by symmetry and the conclusion is same.
System (11) has a unique equilibrium point for all values of parameters . This equilibrium is globally asymptotically stable. If we consider now the following non-autonomous system
where and , then by using Theorem 1, when taking and , all solutions of System (12) globally asymptotically converge to for all values of except and , and for all and .
It is clear that Lemma 1 is valid for a general case of cooperative map F, .
Analogous to the proof of Theorem 1, the proof of the following theorem holds in the general case.
Theorem 2.
Consider the following non-autonomous system of difference equations
where , is a cooperative map and
Assume that there exist such that for every with
all the solutions of the system
converges to a constant . Additionally, suppose that
Then, every solution of the system (13) is convergent and satisfies
Example 2.
Consider the following system of difference equations modeling cooperation
Obviously System (14) has a unique equilibrium point if , . We investigate the stability of by using the following Lyapunov function of the form of the map
Then,
If , , then , which implies that is asymptotically stable. Furthermore, since , as , the equilibrium point is globally asymptotically stable.
In the second case, when , , we will use the LaSalle’s Invariance Principle to investigate the asymptotic stability of . Then, for the set
the following holds: X has at least one zero coordinate, and for all It implies that the maximal invariant subset of under mapping F is . Since M is a singleton, is asymptotically stable.
- It remains to prove the global attractivity of the equilibrium point , when , . If for several , but not for all i, and , for all remaining , then we haveandwhich implies that and that the sequences are decreasing, and therefore, convergent. It is clear that , since otherwise, there would exist another equilibrium point in .
If , , then the sequences are decreasing and so are convergent. It means that there exist the numbers such that
Clearly, , since otherwise System (11) would have another equilibrium points in the first quadrant.
Now, we consider the following non-autonomous system
where , , then by using Theorem 2 and taking
all solutions of System (14) globally asymptotically converge to for , , and for all .
Remark 2.
The method of Lyapunov function is probably the most used method for proving local or global stability of difference equations and there are many books such as [6,18,19,20,25,26] and recent papers such as [28,29] where this method was used. For instance, in [28] the stability of impulsive logical dynamic systems was studied from two aspects: impulsive disturbance and impulsive control and some interesting Lyapunov functions have been employed. In this paper, we use the method of Lyapunov function just as an alternative to the method of difference inequalities.
2.2. Global Stability of Some Additive Cooperative Discrete Dynamical Systems
In this section, we give some global attractivity results for non-autonomous cooperative systems of difference equations, where no other attractivity results are applicable. In Theorem 3 we will ask only for boundedness of the coefficient sequences so that the results from [13] that required the convergence of the coefficient sequences are inapplicable. In addition, the main result in [13] Theorem 3.2, which gives the global dynamics of a non-autonomous system of difference equations in terms of the global dynamics of the corresponding limiting autonomous system of difference equations, where we assume all coefficient sequences to be convergent is not correct as stated as the following example shows:
Example 3.
Consider the non-autonomous difference equation
where , where
Clearly, converges uniformly to on . The limiting equation has a unique equilibrium 1, which is globally asymptotically stable. However, the non-autonomous difference equation has an ever-increasing solution that starts at the initial value .
Consider the following additive cooperative system
Note that System (17) can be written in the matrix form as
Theorem 3.
Assume that are non-negative and bounded functions, i.e., , for all . Also, assume that , , and are sequences such that
Then, every solution of System (17), where initial values , are nonnegative, converges to the zero equilibrium if
Proof.
Indeed, when denotes the norm, we have that
or, when denotes the norm, we have that
Now the result follows from Theorem 2 and Corollary 1 in [1]. □
Consider the following additive cooperative non-autonomous systems
They all are of the form of System (17). Note that in System (19)
and in System (20)
and in System (21)
Based on Theorem 3, the following three claims are true.
Corollary 1.
Corollary 2.
Corollary 3.
Remark 3.
It is obvious that Theorem 3 is valid for distinct combinations of the functions
Now, consider the following additive non-autonomous system
It can be rewritten in the form of System (17) as follows
or in matrix form
The proof of the following theorem is the same as the proof of Theorem 3. This system is not a cooperative system, but it is a sub-linear system.
Theorem 4.
Remark 4.
Let us note that Theorem 4 can be applied in the case when functions are of form for because for and .
The next results hold for cooperative systems.
Theorem 5.
Consider system (22) and assume that are non-decreasing functions, for all . Also, assume that
and that
is a limiting system.
Also, assume that there exists such that every solution of the system
converges to a constant for every where
and
If
then every solution of the system (22) is convergent and satisfies
Example 4.
Consider the following system of equations:
where , . Let be the map associated with (25), that is .
Theorem 6.
The following statements are true.
- (a)
- T maps the positive quadrant into the invariant set .
- (b)
- For all values of the parameters, the system has the equilibrium point .
- (c)
- There is at least one and at most two equilibrium points.
- (d)
- The point is the unique equilibrium if and only ifIn this case, is globally asymptotically stable.
- (e)
- A positive interior fixed point exists if and only if condition (26) is not satisfied, that is whenIn this case, is globally asymptotically stable on .
Proof.
(a): It is clear that T maps the positive quadrant into . For the proof of (b)–(f) we will consider the following equilibrium curves equation of the system
Now, solving for one variable (y and x, respectively) we obtain
For simplicity, we will set the equilibrium curves as
The slopes at the origin of these two curves are as follows
(c): Monotonicity and concavity intervals for and are obvious. In view of Lemma 5 from [30] if an interior equilibrium exists, it is unique, and also it must belong to the set limited by the asymptotes. The asymptotes of are
while the asymptotes of are
Since
are not in , the interior fixed point, if it exists, must belong to the interior of the set , where
Thus, the system will have either only as a fixed point or it will also have this unique interior fixed point which belongs to the interior of the set .
(d) and (e): Based on the geometry of the equilibrium curves and their slopes at the origin, we see that there exists an interior equilibrium exactly in the following situations: (i) at least one slope is negative, 0, or ∞. (ii) both slopes are positive, and slope of < slope of . Thus, a necessary and sufficient condition for the existence of an interior equilibrium point is that there exists an interior fixed point if and only if one of (i) or (ii) holds,
The conditions (i), (ii) can be merged into one as follows,
Since (29) give conditions for a unique interior fixed point, we also have conditions for to be the unique fixed point. Namely, whenever the interior fixed point does not exist, which is given by the following,
Next, it will be shown that when is the unique equilibrium that it is globally asymptotically stable. This is simply the consequence of (a).
Now we will show conditions for to be unstable, to show (e). The characteristic polynomial of the Jacobian of the map T at is
From geometric considerations with the function , we can obtain a sufficient condition for to be unstable as: is unstable if or and , which can be rewriten as follows. The point is unstable if
Now we are working under the assumption
since these are the conditions for the existence of an interior equilibrium.
Thus, if the interior equilibrium exists, then is unstable. Proceeding by contradiction, assume that (32) is false, i.e., assume
The first inequality in (32) implies , so either or . But is ruled out because . Thus, , which contradicts (33).
Next, it will be shown that when exists it is globally asymptotically stable. Note first . If the interior equilibrium exists, then is unstable. Given any point in , there is a point such that . Indeed, may be chosen as a point on the ray with a direction vector given by an eigenvector of the Jacobian of T at associated with the spectral radius of such Jacobian. Then, . Since and are monotonic sequences increasing and decreasing, respectively, the omega limit of the order interval is a singleton set consisting of the interior equilibrium. Thus, is globally asymptotically stable completing the proof. □
Applying Theorem 5 to the system
we obtain the following result.
3. Examples of Cooperative Evolutionary Models
In this section, we consider some cooperative evolutionary models where nonlinear transition functions are Beverton–Holt functions or Beverton–Holt functions with squares. See [31,32] for related results with Beverton–Holt transition functions.
Firstly, we investigate the following cooperative evolutionary system
where and are twice differentiable functions on their domains. The non-evolutionary version of this model was considered in some detail in [2,27]. It exhibits Allee’s effect even in the case of cooperation if initial populations are too small. The fixed points of the last two equations in (35) are and , respectively, where and are critical points of functions and .
Lemma 2.
If
then there exist open neighborhoods and of and , respectively, such that
Proof.
The proof follows from the fact that (36) is equivalent to and (that is and are locally asymptotically stable), where
since and . □
Lemma 2 implies that the non-autonomous system formed by the first two equations in (35) are asymptotic to the following limiting system
System (38) has an equilibrium point , which is locally asymptotically stable for all values of and , and has one positive equilibrium point , which is a saddle point if and (see [27]). The following result is from [27].
Theorem 7.
Assume that , then the equilibrium point is globally asymptotically stable, i.e., every solution of (38) satisfies
for all and .
Based on Theorem 1 and using Example 1 we obtain the following result.
Theorem 8.
Now, we consider the cooperative evolutionary system of the form
where and are twice differentiable functions on their domains. As in the previous example, fixed points and , of the last two equations in (39) are, respectively, critical points of functions and . Also, under condition (36), there exist open neighborhoods and of and , respectively, such that (37) holds. It implies that the non-autonomous system formed by the first two equations in (39) is asymptotic to the following limiting system
By an analogous procedure as in the case of the Example 1, considered in [27], it is obtained that the system (40) has equilibrium point , which is locally asymptotically stable for all values of and , and has one positive equilibrium point , which is a saddle point if and . Also, the equilibrium point is globally asymptotically stable if .
Finally, based on Theorem 1 we obtain the following result.
Theorem 9.
The following example shows that construction of the model (35) is possible.
Example 5.
Consider the following model
where , , and .
Then, there exist open neighborhoods and of and , respectively, such that
Also, the non-autonomous system formed by the first two equations in (41) is asymptotic to the following limiting system
Based on Theorems 7 and 8, we obtain the following two results.
Assume that .
1. Then, the equilibrium point is globally asymptotically stable, i.e., every solution of (43) satisfies
for all and .
Example 6.
Consider the following system
where and are twice differentiable functions with a single Fisher’s equation
with , for .
The equilibrium points of Fisher’s equation (45) are solutions of the following equation
Then, the following hold:
- (i)
- if , then there exists only the zero equilibrium point ,
- (ii)
- if , then there exist two equilibrium points: and ,
- (iii)
- if , then there exist three equilibrium points: and two positive equilibrium points .
The zero equilibrium point is always locally asymptotically stable. For the equilibrium point is semistable from above since and , where . If , then is asymptotically stable and is a repeller, since and .
By using Theorem 1.18 [18] we see that the equilibrium points and are globally asymptotically stable with the corresponding basins of attractions:
- (i)
- if , then ,
- (ii)
- if , then and ,
- (iii)
- if , then and .
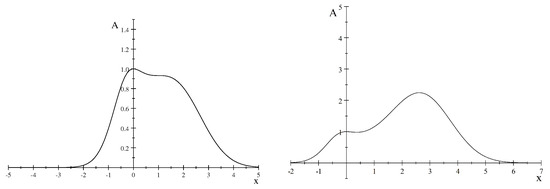
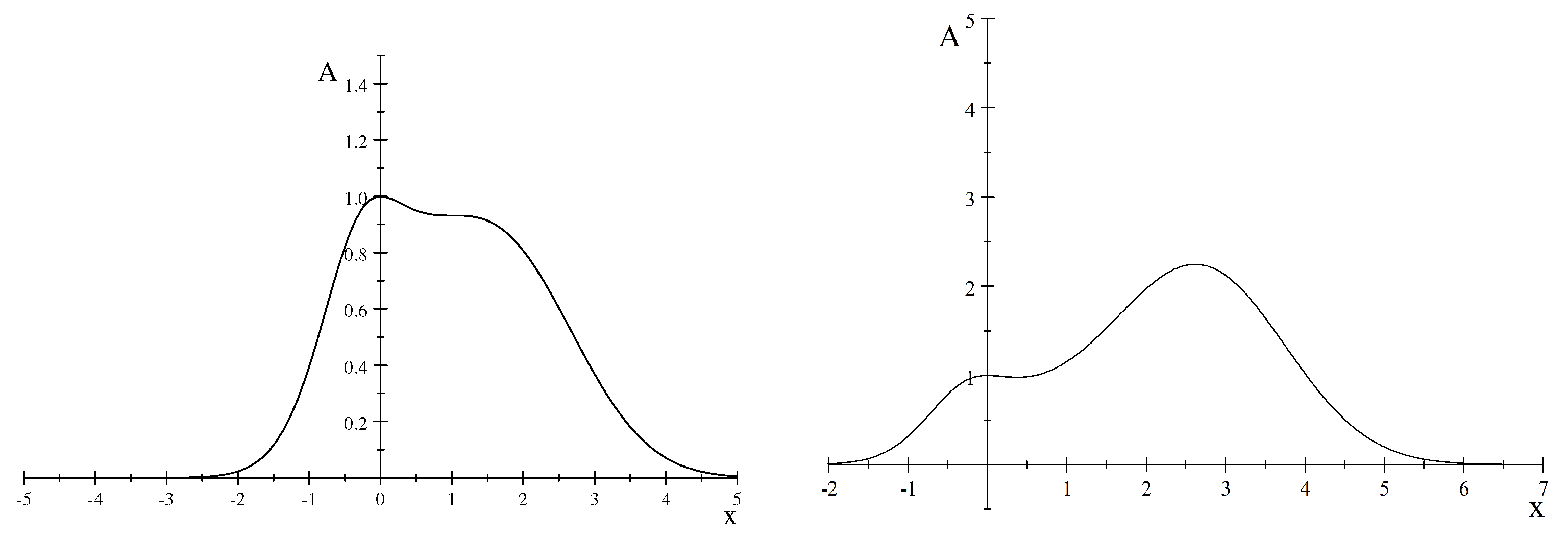
The corresponding fitness function is
where . Since and for and , we conclude that the zero equilibrium is ESS (evolutionary stable), since it is located at a global maximum of the fitness function, see [9,10,15]. On the other hand, if and , then and , which means that the positive equilibrium point is ESS since it is located at the global maximum of the fitness function. See Figure 1.
4. Conclusions
In this paper, we use several techniques to obtain some global attractivity results for non-autonomous cooperative systems of difference equations. The first technique we use is based on the difference inequalities theory which leads to some interesting results for the cooperative systems of any order when coefficients are asymptotically constants. Then, we used another technique specially designed for non-autonomous systems to obtain global attractivity results under weaker conditions on non-autonomous coefficients such as boundedness without convergence. Finally, we used a geometrical method to prove the global asymptotic stability of an autonomous system (25) which is a limiting equation for a non-autonomous cooperative system (34), and so we obtain the global attractivity of the equilibrium of (34). Our results have some analog results for two-dimensional competitive systems in [14], but unlike the results in [14] these results be extended to n-dimensional cooperative systems. Our results can not be derived from incorrect results in [13] without further verifications. The results in [13] need some extra conditions to be correct, in which case they might have the potential to be applicable to our examples. In the last section, we provide global dynamics of some cooperative evolutionary models, also known as Darwinian models, which leads to the problems of describing the global attractivity of non-autonomous cooperative systems of difference equations, see [9,10,11,12,15] for the basic results of this theory.
Author Contributions
Conceptualization, M.R.S.K. and M.N.; methodology, M.R.S.K., M.N. and Z.N.; software, M.R.S.K., M.N. and Z.N; validation, M.R.S.K., M.N., Z.N. and S.T.; formal analysis, M.R.S.K., M.N., Z.N. and S.T.; investigation, M.R.S.K., M.N. and Z.N.; writing—original draft preparation, M.R.S.K., M.N. and Z.N.; writing—review and editing, M.R.S.K., M.N. and Z.N.; visualization, M.R.S.K., M.N. and Z.N.; supervision, M.R.S.K., M.N. and Z.N. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| MDPI | Multidisciplinary Digital Publishing Institute |
| DOAJ | Directory of open access journals |
| TLA | Three letter acronym |
| LD | Linear dichroism |
References
- Bilgin, A.; Kulenović, M.R.S. Global Attractivity for Nonautonomous Difference Equation via Linearization. J. Comput. Anal. Appl. 2017, 23, 1311–1322. [Google Scholar]
- Allen, L. An Introduction to Mathematical Biology; Parson: Boston, MA, USA, 2006; Available online: https://www.pearson.com/en-us/subject-catalog/p/introduction-to-mathematical-biology-an/P200000006070/9780130352163 (accessed on 15 September 2024).
- Bilgin, A.; Kulenović, M.R.S. Global Asymptotic Stabilty for Discrete Single Species Population Models. Discret. Nat. Soc. 2017, 2017, 5963594. [Google Scholar] [CrossRef]
- Cima, A.; Gasull, A.; Manosa, V. Asymptotic Stability for Block Triangular Maps. Sarajevo J. Math. 2022, 18, 25–44. Available online: https://upcommons.upc.edu/bitstream/handle/2117/375676/03-Anna_Cima-Armengol_Gasull-Victor20Manosa.pdf?sequence=3 (accessed on 15 September 2024). [CrossRef]
- Jamieson, W.; Merino, O. Asymptotic behavior results for solutions to some nonlinear difference equations. J. Math. Anal. Appl. 2015, 430, 614–632. [Google Scholar] [CrossRef]
- Krause, U. Positive Dynamical Systems in Discrete Time. Theory, Models, and Applications; De Gruyter Studies in Mathematics, 62; De Gruyter: Berlin, Germany, 2015. [Google Scholar] [CrossRef]
- Thieme, H.R. Mathematics in Population Biology; Princeton Series in Theoretical and Computational Biology; Princeton University Press: Princeton, NJ, USA, 2003; Available online: https://press.princeton.edu/books/paperback/9780691092911/mathematics-in-population-biology (accessed on 15 September 2024).
- Ackleh, A.S.; Cushing, J.M.; Salceanu, P.L. On the dynamics of evolutionary competition models. Nat. Resour. Model. 2015, 28, 380–397. Available online: https://onlinelibrary.wiley.com/doi/epdf/10.1111/nrm.12074 (accessed on 15 September 2024). [CrossRef]
- Cushing, J.M. An evolutionary Beverton–Holt model. In Theory and Applications of Difference Equations and Discrete Dynamical Systems; Springer: Heidelberg, Germany, 2014; pp. 127–141. [Google Scholar]
- Cushing, J.M. One Dimensional Maps as Population and Evolutionary Dynamic Models. In Applied Analysis in Biological and Physical Sciences; Springer: New Delhi, India, 2016; pp. 41–62. Available online: https://link.springer.com/chapter/10.1007/978-81-322-3640-5_3 (accessed on 15 September 2024).
- Cushing, J.M. Difference equations as models of evolutionary population dynamics. J. Biol. Dyn. 2019, 13, 103–127. [Google Scholar] [CrossRef] [PubMed]
- Cushing, J.M. A Darwinian Ricker Equation, Progres on Difference Equations and Discrete Dynamical Systems. In Proceedings of the 25th ICDEA, London, UK, 24–28 June 2019; pp. 231–243. [Google Scholar]
- Mokni, K.; Elaydi, S.; CH-Chaoui, M.; Eladdadi, A. Discrete evolutionary population models: A new approach. J. Biol. Dyn. 2020, 14, 454–478. [Google Scholar] [CrossRef] [PubMed]
- Kulenović, M.R.S.; Nurkanović, M.; Nurkanović, Z.; Trolle, S. Asymptotic Behavior of Certain Non-autonomous Planar Competitive Systems of Difference Equations. Mathematics 2023, 11, 3909. Available online: https://www.mdpi.com/2227-7390/11/18/3909# (accessed on 15 September 2024). [CrossRef]
- Vincent, T.L.; Brown, J.S. Evolutionary Game Theory, Natural, Selection, and Darwinian Dynamics; Cambridge University Press: Cambridge, NY, USA, 2005. [Google Scholar] [CrossRef]
- Fisher, R.A. The Genetical Theory of Natural Selection: A Complete Variorum Edition; Oxford University Press: Oxford, UK, 1930. [Google Scholar]
- Lande, R. A quantitative genetic theory of life history evolution. Ecology 1982, 33, 607–615. [Google Scholar] [CrossRef]
- Kulenović, M.R.S.; Merino, O. Discrete Dynamical Systems and Difference Equations with Mathematica; Chapman and Hall/CRC: Boca Raton, FL, USA; London, UK, 2002. [Google Scholar] [CrossRef]
- Elaydi, S. An Introduction to Difference Equations, 3rd ed.; Undergraduate Texts in Mathematics; Springer: New York, NY, USA, 2005. [Google Scholar]
- Elaydi, S. Discrete Chaos; Chapman& Hall/CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Best, J.; Castillo-Chavez, C.; Yakubu, A. Hierarchical competition in discrete-time models with dispersal. Fields Inst. Commun. 2003, 36, 59–72. Available online: https://www.academia.edu/68711973/Hierarchical_competition_in_discrete_time_models_with_dispersal (accessed on 15 September 2024).
- Franke, J.E.; Yakubu, A.-A. Mutual exclusion versus coexistence for discrete competitive systems. J. Math. Biol. 1991, 30, 161–168. Available online: https://www.academia.edu/9570439/Mutual_exclusion_versus_coexistence_for_discrete_competitive_systems (accessed on 15 September 2024). [CrossRef]
- Franke, J.E.; Yakubu, A.-A. Global attractors in competitive systems. Nonlin. Anal. TMA 1991, 16, 111–129. [Google Scholar] [CrossRef]
- Franke, J.E.; Yakubu, A.-A. Geometry of exclusion principles in discrete systems. J. Math. Anal. Appl. 1992, 168, 385–400. Available online: https://core.ac.uk/download/pdf/82126078.pdf (accessed on 15 September 2024). [CrossRef]
- Kocic, V.; Ladas, G. Global Behavior of Nonlinear Difference Equations of Higher Order with Applications; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1993. [Google Scholar]
- Lakshmikantham, V.; Trigiante, D. Theory of Difference Equations: Numerical Methods and Applications, 2nd ed.; Monographs and Textbooks in Pure and Applied Mathematics, 251; Marcel Dekker, Inc.: New York, NY, USA, 2002; p. x+300. [Google Scholar]
- Kulenović, M.R.S.; Nurkanović, M. Global Asympotic Behavior of a Two-dimensuional System of Difference Equations Modelling Cooperation. J. Differ. Equ. Appl. 2003, 9, 149–159. Available online: https://scholar.google.com/citations?view_op=view_citation&hl=hr&user=pqOYDPoAAAAJ&citation_for_view=pqOYDPoAAAAJ:eQOLeE2rZwMC (accessed on 15 September 2024). [CrossRef]
- Xueying, D.; Jianquan, L.; Xiangyong, C. Lyapunov-based stability of time-triggered impulsive logical dynamic networks. Nonlinear Anal. Hybrid Syst. 2024, 51, 101417. [Google Scholar]
- Yanmei, X.; Jinke, H.; Ziqiang, T.; Xiangyong, C. Stability analysis and design of cooperative control for linear delta operator system. AIMS Math. 2023, 8, 12671–12693. [Google Scholar]
- Kulenović, M.R.S.; Merino, M.O.; Nurkanović, M. Global dynamics of certain competitive system in the plane. J. Differ. Equ. Appl. 2012, 18, 1951–1966. Available online: https://scholar.google.com/citations?view_op=view_citation&hl=hr&user=pqOYDPoAAAAJ&cstart=20&pagesize=80&sortby=pubdate&citation_for_view=pqOYDPoAAAAJ:Se3iqnhoufwC (accessed on 15 September 2024). [CrossRef]
- Ch-Chaoui, M.; Mokni, K. A discrete evolutionary Beverton–Holt population model. Int. J. Dyn. Control 2023, 11, 1060–1075. Available online: https://link.springer.com/article/10.1007/s40435-022-01035-y (accessed on 15 September 2024). [CrossRef]
- Mokni, K.; Ch-Chaoui, M. Complex dynamics and bifurcation analysis for a Beverton–Holt population model with Allee effect. Int. J. Biomath. 2023, 16, 2250127. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).