


General Exact Schemes for Second-Order Linear Differential Equations Using the Concept of Local Green Functions

 ,
,  ,
, 
 and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The Exact Schemes
2.1. The Concept of Local Green Functions
2.2. Dirichlet Boundaries
2.3. Exact Scheme for Dirichlet and Neumann Boundaries
3. Case Studies with Discontinuous and Singular ODE
3.1. Implementation of the Exact Scheme to Solve Case Studies
- 1.
- After defining the ODE to be solved and the necessary boundary conditions (Dirichlet problem, mixed problem), based on Equation (2), we perform an arbitrary partition of the interval . The indexes of the nodes are: , where 0 and are the indices of the boundary points.
- 2.
- 3.
- 4.
- Boundary conditions are also easily managed:
- For Dirichlet boundary conditions, we use the substitution defined in Equation (9),
- For mixed boundary conditions, we apply the Neumann to Dirichlet transformation based on the Equation (25) in order to calculate the potential value at the boundary point where the Neumann boundary condition is defined.
- 5.
- Construct the linear system of equations defined in Equation (10), using the coefficient values and boundary conditions calculated before, and solve it by inverting the tridiagonal matrix.
- 6.
- The elements of the vector obtained in this way are equal to the values of the analytic solution of the ODE defined in the first step taken in the grid points, according to the boundary conditions (according to Theorem 2).
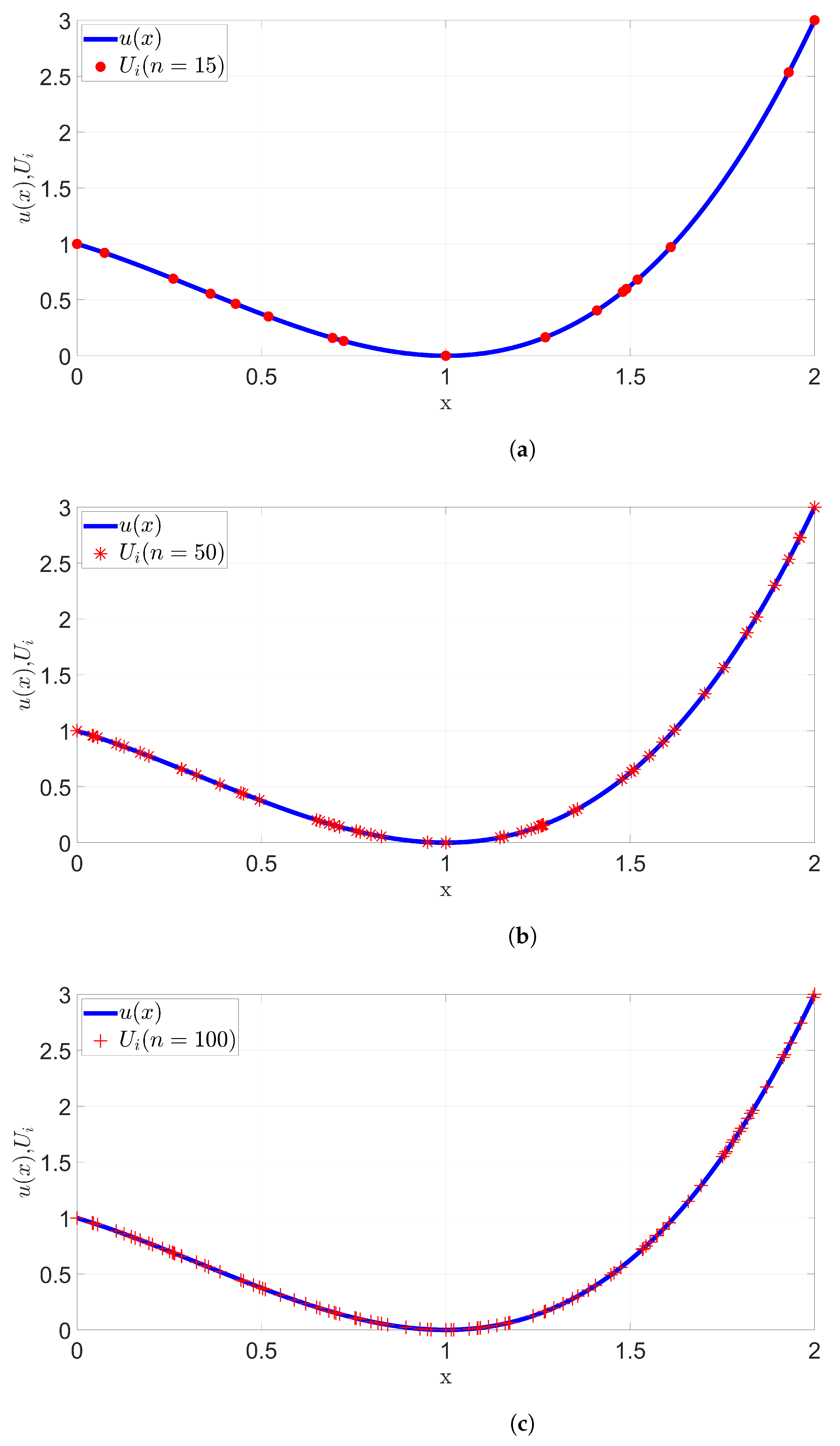
3.2. A Case Study for Discontinuous with Increasing Mesh Resolution
- 1.
- subintervals and the analytic solution is calculated in points,
- 2.
- subintervals and the analytic solution is calculated in points,
- 3.
- subintervals and the analytic solution is calculated in points.
3.3. Case Study for a Singular ODE with a Piecewise Source Term
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Regmi, R.P. Application of differential equation in L-R and C-R circuit analysis by classical method. Janapriya J. Interdiscip. Stud. 2017, 5, 114–123. [Google Scholar] [CrossRef]
- Tai-Ran, H. Applied Engineering Analysis; John Wiley and Sons Ltd.: Hoboken, NJ, USA, 2018; ISBN 1119071208. [Google Scholar]
- Simpson, M.J.; Lythe, G. (Eds.) Exact Solutions of Linear Reaction-Diffusion Processes on a Uniformly Growing Domain: Criteria for Successful Colonization. PLoS ONE 2015, 10, e0117949. [Google Scholar]
- Al-Gwaiz, M. Sturm-Liouville Theory and Its Applications; Springer: London, UK, 2008; ISBN 978-1-84628-972-9. [Google Scholar]
- Strang, G. Differential Equations and Linear Algebra; Wellesley-Cambridge Press: Cambridge, UK, 2015; ISBN 0980232791. [Google Scholar]
- LeVeque, R.J. Finite Difference Methods for Ordinary and Partial Differential Equations; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2007; ISBN 978-0-89871-629-0. [Google Scholar]
- Adison, H. Principles and Practice of Finite Volume Method; Clanrye International: New York, NY, USA, 2015; ISBN 978-1632404176. [Google Scholar]
- Sauter, S.; Schwab, C. Boundary Element Methods; Springer: Berlin/Heidelberg, Germany, 2010; ISBN 978-3-540-68093-2. [Google Scholar]
- Pepper, D.W.; Heinrich, J.C. The Finite Element Method; CRC Press: Boca Raton, FL, USA, 2017; ISBN 978-1498738606. [Google Scholar]
- Anulo, A.A. Numerical Solution of Linear Second Order Ordinary Differential Equations with Mixed Boundary Conditions by Galerkin Method. Math. Comput. Sci. 2017, 2, 66–78. [Google Scholar] [CrossRef]
- Cao, D. An Exponential Spline Difference Scheme for Solving a Class of Boundary Value Problems of Second-Order Ordinary Differential Equations. Discret. Dyn. Nat. Soc. 2020, 2020, 1–16. [Google Scholar] [CrossRef]
- Mamadu, J.E.; Njoseh, I.N. Tau-Collocation Approximation Approach for Solving First and Second Order Ordinary Differential Equations. J. Appl. Math. Phys. 2016, 4, 383–390. [Google Scholar] [CrossRef]
- Svantnerne Sebestyen, G.; Farago, I.; Horvath, R.; Kersner, R.; Klincsik, M. Stability of patterns and of constant steady states for a cross-diffusion system. J. Comput. Appl. Math. 2016, 293, 208–216. [Google Scholar] [CrossRef]
- Kersner, R.; Klincsik, M.; Zhanuzakova, D.T. A competition system with nonlinear cross-diffusion: Exact periodic patterns. Rev. Real Acad. Cienc. Exactas Fis. Nat. Ser. A. Mat. 2022, 116, 187. [Google Scholar] [CrossRef]
- Kaur, K.; Singh, G. An Efficient Non-Standard Numerical Scheme Coupled with a Compact Finite Difference Method to Solve the One-Dimensional Burgers’ Equation. Axioms 2023, 12, 593. [Google Scholar] [CrossRef]
- Vrabel, R. Lower and Upper Solution Method for Semilinear, Quasi-Linear and Quadratic Singularly Perturbed Neumann Boundary Value Problems. Axioms 2023, 12, 154. [Google Scholar] [CrossRef]
- Shukla, A.; Vedula, P. A hybrid classical-quantum algorithm for solution of nonlinear ordinary differential equations. Appl. Math. Comput. 2023, 442, 127708. [Google Scholar] [CrossRef]
- Sari, Z.; Klincsik, M.; Odry, P.; Tadic, V.; Toth, A.; Vizvari, Z. Lumped Element Method Based Conductivity Reconstruction Algorithm for Localization Using Symmetric Discrete Operators on Coarse Meshes. Symmetry 2023, 15, 1008. [Google Scholar] [CrossRef]
- Uhlmann, G. 30 Years of Calderón’s Problem, Seminaire Laurent Schwartz—EDP et Applications, Cellule MathDoc/CEDRAM, Séminaire Laurent Schwartz—EDP et Applications. 2012, pp. 1–25. Available online: http://eudml.org/doc/275764 (accessed on 24 June 2023).
- Bondarenko, N.P. Inverse Spectral Problems for Arbitrary-Order Differential Operators with Distribution Coefficients. Mathematics 2021, 9, 2989. [Google Scholar] [CrossRef]
- Argun, R.; Gorbachev, A.; Lukyanenko, D.; Shishlenin, M. On Some Features of the Numerical Solving of Coefficient Inverse Problems for an Equation of the Reaction-Diffusion-Advection-Type with Data on the Position of a Reaction Front. Mathematics 2021, 9, 2894. [Google Scholar] [CrossRef]
- Samarskii, A.A. The Theory of Difference Schemes; CRC Press: Boca Raton, FL, USA, 2001; ISBN 0-82470468-1. [Google Scholar]
- Delkhosh, M. The Conversion a Bessel’s Equation to a Self-Adjoint Equation and Applications. World Appl. Sci. J. 2011, 15, 1687–1691. [Google Scholar]
- Kiguradze, I.T.; Shekhter, B.L. Singular boundary-value problems for ordinary second-order differential equations. J. Sov. Math. 1988, 43, 2340–2417. [Google Scholar] [CrossRef]
- Kiguradze, T. On solvability and unique solvability of two-point singular boundary value problems. Nonlinear Anal. Theory Methods Appl. 2009, 71, 789–798. [Google Scholar] [CrossRef]
- Kiguradze, I.T.; Kiguradze, T.I. Conditions for the well-posedness of nonlocal problems for second-order linear differential equations. Differ. Equ. 2011, 47, 1414–1425. [Google Scholar] [CrossRef]
- Vizvari, Z.; Sari, Z.; Klincsik, M.; Odry, P. Exact schemes for second-order linear differential equations in self-adjoint cases. Adv. Differ. Equ. 2020, 2020, 497. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vizvari, Z.; Klincsik, M.; Odry, P.; Tadic, V.; Sari, Z. General Exact Schemes for Second-Order Linear Differential Equations Using the Concept of Local Green Functions. Axioms 2023, 12, 633. https://doi.org/10.3390/axioms12070633
Vizvari Z, Klincsik M, Odry P, Tadic V, Sari Z. General Exact Schemes for Second-Order Linear Differential Equations Using the Concept of Local Green Functions. Axioms. 2023; 12(7):633. https://doi.org/10.3390/axioms12070633
Chicago/Turabian StyleVizvari, Zoltan, Mihaly Klincsik, Peter Odry, Vladimir Tadic, and Zoltan Sari. 2023. "General Exact Schemes for Second-Order Linear Differential Equations Using the Concept of Local Green Functions" Axioms 12, no. 7: 633. https://doi.org/10.3390/axioms12070633
APA StyleVizvari, Z., Klincsik, M., Odry, P., Tadic, V., & Sari, Z. (2023). General Exact Schemes for Second-Order Linear Differential Equations Using the Concept of Local Green Functions. Axioms, 12(7), 633. https://doi.org/10.3390/axioms12070633