1. Introduction
The study of complex nonlinear dynamical systems appears in many disciplines, such as physics, engineering, biology, social sciences, etc. The high degree of complexity of such systems makes their analysis quite a challenge. From this point of view, data-driven mathematical methods might be of high importance. These methods aspire to exploit measurement data, which form a relatively small subset of the original state space. However, they might describe the evolution of the original system, even if its dynamics are complicated or unknown. In recent years, it seems that advances in numerical techniques and the broader availability of data have brought data-driven methods to the forefront of scientific research. For example, one such technique might as well be Koopman operator theory in connection with Dynamic Mode Decomposition (DMD), and especially with Extended Dynamic Mode Decomposition (EDMD).
Firstly, in the Koopman operator framework (initiated in [
1], see also [
2,
3]), the central objects are complex-valued functions defined on the state space (these functions are called observables of the systems). The Koopman operator describes the evolution of the observables according to the evolution of the system. This approach enables us to “lift” the dynamical system from its original state space to new spaces spanned by observables.
The main advantage is that the Koopman operator is linear. Hence, powerful methods from operator theory, such as spectral analysis, can be applied. The Koopman operator might be quite useful especially when we study in high-dimensional and strongly non-linear systems. In these cases, the phase space is quite large and its dynamics are so complicated that very little can be concluded about its corresponding geometrical properties. Applications of this approach range from, among others, fluid dynamics (see [
4,
5]), energy modeling in buildings (see [
6]), oceanography (see [
7]) and molecular kinetics (see [
8]).
Despite its advantages, the Koopman operator converts a finite-dimensional system to an infinite-dimensional linear system. In other words, we “pay” in dimensions, in order to gain “linearity”. Being infinite-dimensional, the Koopman operator cannot be calculated while its spectral properties are difficult to explore. In practice, this amounts to a simplification only when one can handle the operator numerically. Consequently, the need for numerical methods that generate finite dimensional approximations of the Koopman operator is emerging.
In this direction, dynamic mode decomposition (DMD) (see [
9,
10]) and its generalization, the extended-DMD (EDMD) have been proven very efficient. Since these methods depend on data and rely only on least square regression, they are very easy to implement.
The EDMD method algorithm starts by choosing a finite set of observables, which is called a dictionary. Then, we approximate the Koopman operator as a linear map on the span of this finite set. Note that the finite-dimensional linear map which emerges in such a case is numerically tractable. Furthermore, its spectral properties can approximate those of the Koopman operator (see [
11]).
Critical to the success of the EDMD algorithm is the appropriate choice of the dictionary. The choice of a suitable dictionary significantly impacts the approximation quality of the spectral properties of the system (see [
11,
12,
13]). However, in many practical applications, it is often not so easy to make such a selection without some prior information on the dynamics of the system.
The Koopman operator-EDMD algorithm has been applied to several ODEs and PDEs. For example, see [
14] for an application to Burgers’ equation and the nonlinear Scrödinger equation. Moreover, see [
15] for an application to Kuramoto–Sivashinsky PDE. In this paper, we demonstrate the use of the Koopman-EDMD method when applied to the hypergeometric equation. The effectiveness of our approach is based on the choice of the appropriate dictionary.
The hypergeometric equation is a linear second-order homogeneous differential equation that falls into the Fuchsian class and has three regular singular points at and In this paper, we restrict the independent variable to be real and the dependent variable to be a real−valued function of a real variable. At each singular point, there is a fundamental set of two solutions that span the two-dimensional linear vector solution space.
Summarizing our discussion, the innovation and contribution of this paper are summarized as follows: We address the trajectory approximation of a hypergeometric equation via EDMD methods. The EDMD method gives rise to a linear system on an enhanced state space that can approximate a given trajectory. Having data of a given trajectory in a finite horizon allows us to construct a discrete linear system of dimension where m is the dimension of the state space of the original nonlinear system. We demonstrate the approximation of a single trajectory of a hypergeometric equation via EDMD methods. In particular, we solve a hypergeometric equation in the vicinity of 0, which is one of its singular points, by using the Koopman-EDMD theory. Finally, we show that we can improve the approximation of the solution of a hypergeometric equation in the vicinity of 0, by using successive trajectory reconstruction via Koopman-EDMD theory with moving horizon.
The EDMD method is data-driven. Consequently, depending on a suitable choice, the method can be applied to any dynamical system for which probably the dynamical law is unknown and data, in the form of time series, can be collected for some of its trajectories in the state space. Moreover, our approach can be used for any nonlinear dynamical system with known dynamics. However, in such a case a linearization of the dynamics via the EDMD method may be required in order, for example, to study the control theory of this linearized system; the control theory of linear systems is much better understood than the control theory of nonlinear systems.
The rest of the paper is organized as follows. In
Section 2, we briefly present some basic facts about the Koopman operator theory and EDMD method. In
Section 3, we give an example of a hypergeometric equation and its exact solution via hypergeometric series. In
Section 4, we solve the hypergeometric equation in the interval
via Koopman-EDMD theory. In
Section 5, we solve the hypergeometric equation in the interval
via Koopman-EDMD theory. In
Section 6, we present a successive trajectory reconstruction via Koopman-EDMD theory with a moving horizon. Finally,
Section 7 contains our conclusions about this paper.
2. Koopman Operator and EDMD
Koopman operator theory has been extensively used in the analysis, prediction, and control of nonlinear dynamical systems. To define this class of operators, we start with a continuous dynamical system , where is the state space (usually a manifold in ) and f is the evolution map. The system is described by the differential equation . We also denote by the flow map, which is defined as the state of the system in time t when the initial condition is .
In the literature of Koopman operators, complex-valued functions defined on are called observables of the system . We now consider a function space of observables which is closed under composition with the flow map. This means that belongs to whenever . (In many applications, is the space of complex valued square integrable functions on . However, other function spaces can also be considered.) Then, for any , the operator is defined by . The term Koopman operator usually refers to the whole class of operators, i.e., . The linearity of composition implies that is a linear operator for any .
In a similar way, the Koopman operator can be defined for discrete dynamical systems, which, in some sense, are more natural. Indeed, in many practical applications, the differential equations that describe the evolution of the system are completely unknown and we have only measurement data that are provided in discrete time. So, let us assume that we are given a discrete system, , where belongs to the state space . The Koopman operator is defined as the composition of any observable with the evolution map f. Thus, is given by , for any . (Again, is a function space of observables closed under composition with f).
By its definition, the Koopman operator updates every observable according to the evolution of the dynamical system. A new system
is defined which is a global linearization of the original system
(i.e., it does not hold only to the area of some attractor or fixed point). Furthermore, many properties of
can be related to the eigenstructure of
(see [
16]). Consequently, one can utilize tools from functional analysis and operator theory in order to study the system
even if this is a nonlinear one.
The main advantage of the Koopman operator is its linearity. However, it is infinite-dimensional and, except in some cases, we can calculate neither the operator nor its eigenstructure. In order to address the problems that infinite dimensionality poses, we have to look for finite-dimensional linear approximations of the Koopman operator. Towards this direction, the Dynamic Mode Decomposition (DMD) and, mainly, its generalization the Extended Dynamic Mode Decomposition (EDMD) have been proven very successful.
Extended Dynamic Mode Decomposition (EDMD)
We next give a brief description of the EDMD algorithm. The first step is to fix a set of observables , which is usually called a dictionary. In the case of DMD (Dynamic Mode Decomposition), we use only the observables , for . On the contrary, in EDMD any observable can be chosen. In this way, we construct an augmented state space and; hence, EDMD gives better approximation properties than DMD. The augmented state space is denoted by and its elements are denoted by .
The second step involves data collection. To this end, we consider a trajectory of the original system with some initial condition
and some finite time horizon
T. Then, we collect sampling points at a fixed time interval
(although, uniform sampling is not mandatory and one can apply other sampling methods). Therefore, we consider
points in this trajectory, which are denoted by
. These points generate data
in the augmented space
. Finally, the data are organized in data matrices as follows
The last step is to obtain a
matrix
(using, for instance, least square regression methods) such that
. Therefore,
where
is some matrix norm.
The procedure described above can be applied to several trajectories. Hence, we may fix
k trajectories and, following the previous steps, we obtain data matrices
and
for every
. In this case, the matrix
is chosen such that
Consequently, is a best-fit matrix that relates the two data matrices in every trajectory. The matrix generates a finite-dimensional linear system that advances spatial measurements from one time to the next and it provides approximations to the Koopman operator and to the original nonlinear system.
One of the main advantages of EDMD is that it is a purely data-driven method. Therefore, there is actually no restriction to its applicability and it can be utilized even if the dynamics of the system are completely unknown. However, the success of this method depends on the a priori chosen dictionary. In many problems, the most difficult part is to choose a dictionary that will give good approximations. There is no generic algorithm for this problem, however, some recent studies use artificial intelligence methods in order to “train” the dictionary (see [
15,
17]).
6. Successive Trajectory Reconstruction via Koopman-EDMD Theory with Moving Horizon
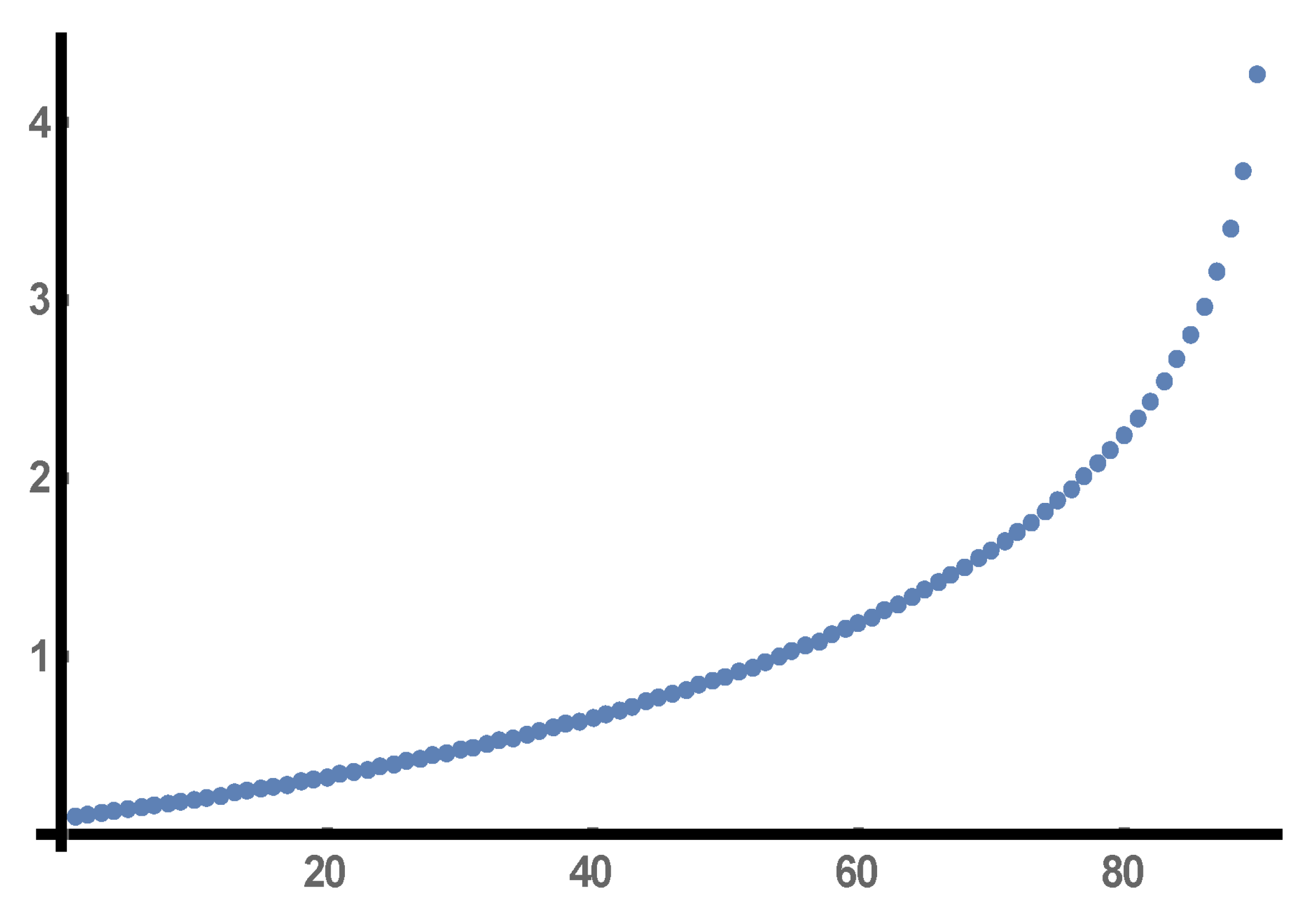
We apply EDMD trajectory reconstruction for
of the real part of the solution (
2) of the differential Equation (
1) whose graph is depicted in
Figure 1.
We consider a four-dimensional EDMD basis consisting of
and we cover the interval
with 14 overlapping windows each of which contains 41 sample points of the hypergeometric solution. We then apply 14 EDMD computations for the 14 moving windows and produce 14 approximating trajectories as well as an equal number of EDMD matrices. The errors between these approximations compared to the real data and measured by the
(Euclidean) norm for all 14 horizons are depicted in
Figure 9 and, thus, the approximation is considered very satisfactory.
The 14 successive approximating trajectories to the hypergeometric solution (
2) of Equation (
1) which cover the interval
are given by
where
enumerates the 14 EDMD computations for the 14 moving windows and the resulting approximating trajectories,
enumerates the 41 sample points at each window,
is a
vector of initial conditions for the basis functions
for each one of the EDMD computations,
is the
EDMD matrix for each of the moving windows,
is the
projection matrix to the one-dimensional space spanned by
x,
is the complex conjugate of
,
,
,
,
are the eigenvalues of the matrices
, and
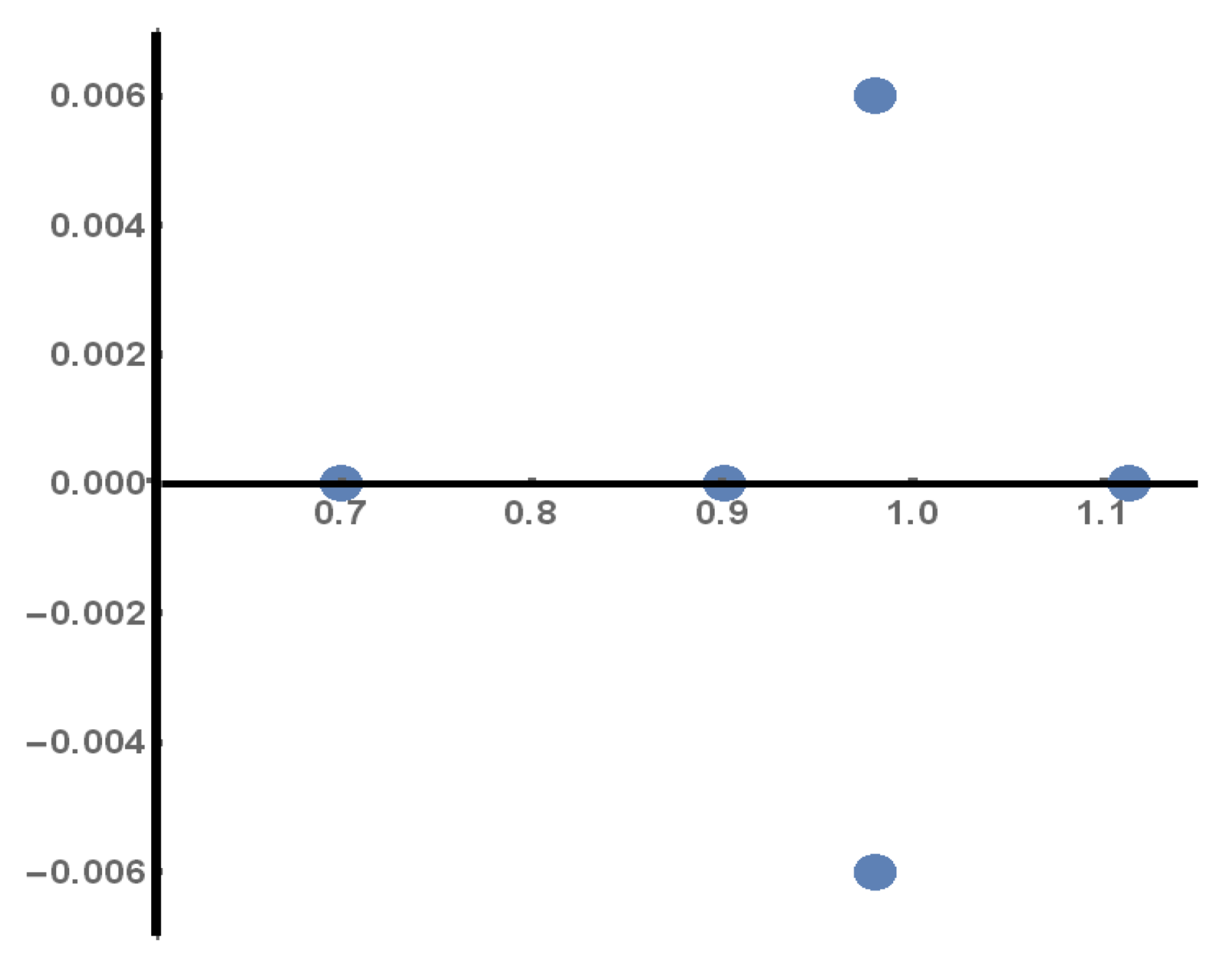
are real coefficients. In the three diagrams of
Figure 10, we depict from left to right the real eigenvalue
, which is the largest, versus
k, the modulus
=
of the complex conjugate eigenvalues
, which are the intermediate, versus
k, and the real eigenvalue
, which is the smallest, versus
k. It becomes evident from the diagrams that the largest real eigenvalue
dominates in the approximating trajectory at the vicinity of the
asymptote.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









