Abstract
In the current digital era, where Unmanned Aerial Vehicles (UAVs), Artificial intelligence (AI), and Internet of Everything (IoE) can be well integrated, more global connectivity and automated solutions can be witnessed. This paper aims to develop an intelligent cellular structure design for a UAV wireless communication topology using an AI framework. The proposed AI framework includes Self Organizing Maps (SOMs) and an NN fitting tool that can be simulated using the Graphical User Interface (GUI) toolbox in MATLAB. The proposed framework is validated in a proof-of-concept scenario, where various parameters of link budget and cellular structure design have been tuned to achieve an efficient and optimized automatic design. The obtained results show high levels of adaptable wireless communication predictions without human intervention, which is a noticeable shift from existing work in the literature.
1. Introduction
The Fourth Industrial Revolution (4IR) represents creative digitization based on interacting technical breakthroughs through innovative algorithms [1]. Utilizing the pillars of the 4IR, including Unmanned Aerial Vehicles (UAVs), Artificial Intelligence (AI), Internet of Everything (IoE), and many others, can open doors to limitless possibilities through major breakthroughs in emerging technologies [2]. This technological revolution has become an integral part of smart cities, vibrant societies, smart healthcare, smart farming, machine learning, and new forms of intelligence applications [3].
Clearly, since data are rapidly increasing, the IoE technology is a vital player in our digital era. This technology has the power to not only connect billions of things via the Internet, but also has the functionality to do that automatically without human intervention [4]. It is widely believed that the IoE has taken the Internet of Things (IoT) to broader horizons to include Things, People, Processing, and Data, and thus more global connectivity [5]. Moreover, the integration between the UAVs and the IoE should be utilized for reasons such as: UAV reliability, flexibility, portability, efficiency, rapid deployment, and line of sight (LoS) connectivity. This would help in offering a wide range of applications to link billions of items and sensors, all of which generate real-time data [6].
There is a tremendous interest in UAVs due to their advantages and wide applications, and great integration with AI. This integration would lead to increased coverage area, connectivity, and capacity, besides decreasing propagation loss and power consumption. Figure 1 shows representative examples of IoE-Enabled UAVs, where coupling the IoE and the UAVs can bring out drastic changes to how people live today [7]. These examples range from wireless communication, emergency monitoring and sensing, localization and detection, the Internet of Medical Things (IoMT), and virtual reality. These applications are still growing to connect billions of people and devices to the grid network [8].
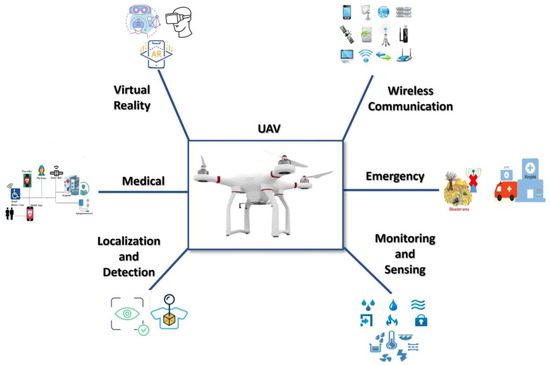
Figure 1.
Representative examples of IoE-enabled UAV applications.
2. Related Studies
This section presents representative related research works that have been described in the literature, where a set of criteria has been utilized to review this related research work that meets the research scope. The criteria are as follows: (a) UAV platform type, (b) network topology, (c) AI framework, and (d) cellular design. This section concludes by highlighting research gaps and our own research motivations.
Wireless communication systems can be divided roughly into two main types, namely terrestrial systems (e.g., base stations) and aerial-based systems (e.g., Satellite and UAVs). Each system has its own advantages and shortcomings [9]. Despite the advancements of both systems, they are not without limitations due to their nature and/or technological capabilities [10]. Terrestrial systems suffer from limited frequency bands and bandwidth, multipath constraints, being vulnerable to dis-connectivity in the case of natural disasters, limited coverage footprint, and high cost to deploy, especially in rough terrains (e.g., mountains) [11]. Satellites suffer from a noticeable propagation path loss and delay, complexity of manufacturing, launching, maintenance, tracking and handover, lifetime variations, and environmental damage resulting from gas emissions during launch [12].
Thus, UAVs, including High Altitude Platforms (HAPs), Low Altitude Platforms (LAPs), Tethered Balloons and Drones, are considered as a midway solution [13]. They exhibit deployment flexibility, providing last-mile connectivity, reconfigurability, and wide footprint coverage with LoS advantages [14]. Moreover, providing wireless communication services via UAVs is increasingly seen as an innovative solution that could offer many of the satellite benefits, but without the distance penalty [15]. Such a suitable alternative infrastructure could serve a wide range of applications and services, e.g., telecommunications, search and rescue, remote sensing, surveillance and security, smart cities, smart agriculture, monitoring disaster-relief activities, atmospheric studies, smart service delivery, border monitoring, high-resolution aerial imaging, smart journalism, localization, and navigation [16].
Researchers are striving to develop various aspects related to UAV state-of-the-art usages, applications, and capabilities [17]. UAVs can take advantage of many advanced technologies, such as D2D communication, small cells (e.g., Femtocell), (HetNet) Network, Multiple Input Multiple Output (MIMO) antennas, Worldwide Interoperability for Microwave Access (WiMAX) [18], and Wireless Fidelity (WiFi) (e.g., 802.11 AX (WiFi e6)) linked to 5G and 6G [19]. Figure 2 demonstrates representative projects of different aerial platforms across the globe, including Airships, Tethered Balloons, Aircrafts, and Drones. This reflects the great international efforts that have been put into the development of these aerial platform technologies [20].
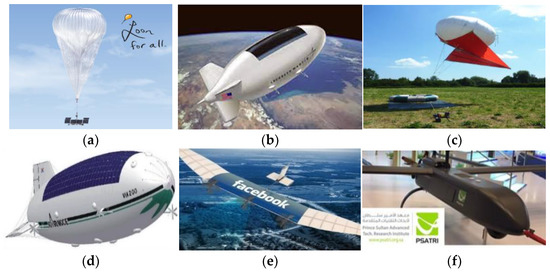
Figure 2.
Aerial platform examples across the globe. (a) Google Loon—International, (b) HAA—USA, (c) ABSOLUTE Tethered Balloon—EU, (d) KARI—Korean, (e) Facebook fixed-wing Aircraft—International, (f) PSATRI Drone—KSA.
The rest of this section highlights the recent related work on cellular structure design. This section concludes by highlighting research gaps and our own research motivations, as Table 1 shows.

Table 1.
Comparison between related studies against the proposed model.
At 20 km altitude using a HAP platform, researchers in [21] focus on multi-cell design using an adaptive smart antenna array to serve fixed users. Authors in [22] present a Neural Networks (NN) framework via a LAP to enhance wireless connectivity. The optimized model dealt with a fixed cellular structure design to guarantee both received signal strength and low transmission power.
A tethered drone is used in [23] to guarantee a good level of energy and data. The drone can float within the designated region to find an optimal transmission location that maximizes the cellular coverage for ground users. Three predefined scenarios have been put in place to achieve the proposed model. Authors in [24] present a drone that utilizes an omnidirectional antenna that can tune some parameters for better connectivity. Such parameters should be optimized to improve coverage probability and throughput. Authors highlighted the importance of improving the integration of UAVs and cellular technologies.
Designing a macro cell network using a swarm of UAVs is presented in [25], where a multiple-antenna is used. This would achieve higher capacity in addition to degree-of-freedom when designing cellular networks. A multi beam UAV communication for better cellular structure design is introduced in [26], which aims to enhance data streams with less interference. The proposed work assumes that the network topology uses a fixed beam pattern at a fixed location.
A machine learning (ML) approach is considered in [27] to enhance coverage and power consumption for a LAP standalone topology. The proposed ML model has assumed a circular cellular structure design for simplicity. Researchers in [28] present a drone trajectory design under cellular connectivity. The proposed work relies on a combination of a 3D map of the environment and propagation models. It is shown that the targeted footprint zone did not change when increasing the altitude of the UAV since the trajectory is predefined.
Authors in [29] utilize a directional antenna to extend coverage for cellular-connected UAVs. A beam switching technique is used as the cellular structure design over a targeted area to improve range and link quality. A modified parallel projection algorithm is used in [30] for fair data collection and trajectory design using a UAV wireless cellular system. Such a homogeneous trajectory could adjust the distance of cellular cells.
A cooperative cellular design via a fleet of drones is presented [31] to improve trajectory design and radio resource management. Results were promising; using a MIMO antenna is recommended for better performance. Authors in [32] presented a tethered platform for rapid restoration of communications links after a disaster using a Radial Basis Function (RBF) approach. A semi-adaptive cellular structure design is used across various terrains. Researchers in [33] presented a small cellular structure via adopting massive MIMO on a drone. It had acceptable results for small geographical areas, but might result in a harmful impact on a larger geographical area.
Reinforcement Learning (RL) is considered in [34] to enhance cellular systems by focusing on jamming channels. Authors in [35] use a multi-agent deep reinforcement learning (DRL) for cellular UAV communications and trajectory design. Sensible results are obtained when a drone transmits data close to the cellular structure central, while performance decays when the drone moves towards the edge of the cellular structure. Table 1 shows a comparison between related studies against the proposed model.
By analyzing the related studies and based on what has been presented in Table 1, the research gaps have been identified, so we draw our own research motivations to inform our own proposed model. There are unsolved issues that have been identified in the literature, such as fixed or predefined cellular designs with or without an AI framework to obtain an adaptive cellular structure design. Therefore, our proposed novel contribution is motivated by this to cover this gap. To our best knowledge and based on the comparative analysis, no work has been carried out to achieve automatic optimization of the cellular structure design from a UAV perspective using an AI framework. Clearly, our proposed model aims to develop an adaptive and intelligent cellular structure design for a UAV wireless communication topology using an AI framework, which is a noticeable shift from existing work in the literature. To achieve our aim, the following objectives need to be pursued:
- Determining parameters that affect designing cellular structure designs from a UAV perspective and via using MIMO antenna;
- Developing an AI framework to optimize the cellular structure design automatically;
- Validating the proposed work in the case of a real urban and densely populated zone.
3. Proposed UAV Topology and Simulation
The planning link between a system and other systems and/or users is termed “Network Topology”, where a Radio Frequency (RF) or an optical links can be utilized. The proposed work aims to develop an intelligent cellular structure design for a UAV wireless communication topology using an AI framework. The proposed AI framework includes Self Organizing Maps (SOMs) and an NN fitting tool that can be simulated using the Graphical User Interface (GUI) toolbox in MATLAB. The proposed intelligent wireless communication system also aims to tune various parameters of link budget, as well as cellular structure design for automatic optimization. Researchers in [36,37,38] emphasize the power of the GUI toolkit to complete a visual analysis. Moreover, the developed GUI software is useful to carry out the needed calculations of the proposed model in an efficient and simple manner. This section presents the proposed UAV topology and simulation.
Figure 3 shows the proposed intelligent heterogenous 5G topology, where different UAV-based systems integrate with IoE and AI frameworks. The figure consists of two main segments, where each has its own software and different software capabilities [39]. Segment one has two parts: ground and space. The former includes Ground Control Centre (GCC) to control the aerial platform’s functionality and flight tasks via a backhaul link called “Control signal” [40]. In addition, there are numerous wireless communication links within the footprint that can serve fixed and/or mobile users, ranging from indoors to outdoors, that support IoE-wide smart applications, such as smart buildings, smart cities, smart farming, and support supply chains [41]. The latter includes at least one UAV platform that carries communication payloads, an integrated energy system (e.g., solar arrays, batteries), and a station-keeping system [42].
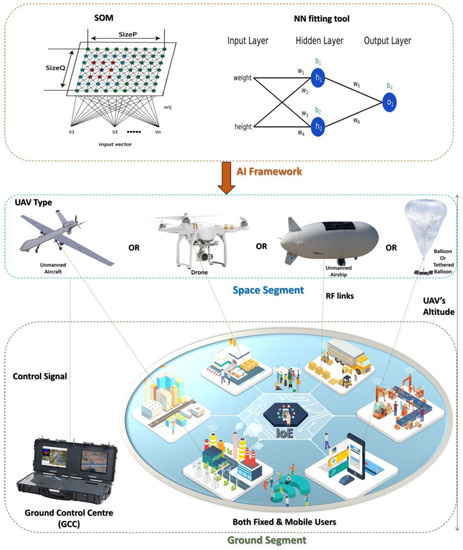
Figure 3.
Proposed intelligent heterogenous 5G topology that integrates a UAV-based system with IoE and AI.
Segment two comprises the proposed AI framework that encompasses SOMs and an NN fitting tool for automatic optimization that helps plan a ubiquitous and seamless 5G cellular structure design from a UAV perspective. This would help in making smart decisions, which can save time and effort [43]. The purpose of considering the proposed AI framework here is twofold: First, to optimize cellular cell design, which affects the link budget parameters using a SOMs unsupervised learning algorithm. Second, to validate the SOMs using the NN fitting tool. Noticeably, using a 5G MIMO antenna is not only seen as an advanced mobile communications system, but also lays a solid foundation for intelligence of everything [44,45].
3.1. Cellular Structure Design
This subsection gives an outline of the cellular structure design from a UAV perspective, as can be seen in Figure 4, while Figure 5 illustrates a coordinate system of a UAV’s cellular structure. The intelligent heterogenous 5G topology uses a smart MIMO antenna, which has several benefits, such as increased link and data reliability, simplifying the multiple access layer, bridging coverage gaps between cells or cells overlap, offering energy-saving resources, utilizing self-organized frequency reuse, and enhancing cellular cell size and location. Therefore, the proposed AI has a place in optimization and adaptability based on real scenarios of a designated area, which is the main contribution of this paper. To note, the smart MIMO antenna that is on-board a UAV uses a beamforming technique. As shown in Figure 4 and Figure 5, there are 7 parameters that have been identified to design and optimize a cellular cell [46]. These parameters are, also, considered as inputs for the proposed AI. The parameters are:
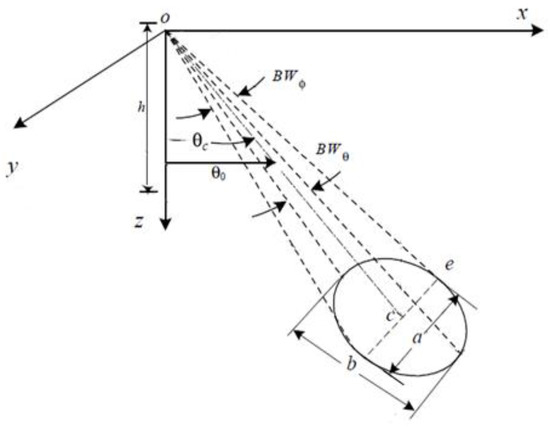
Figure 4.
Cellular footprint of a UAV using a MIMO antenna.
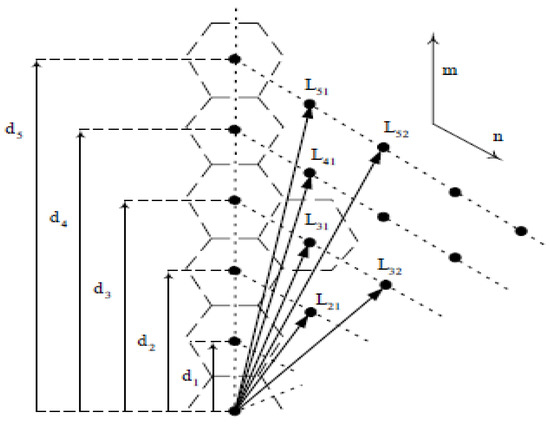
Figure 5.
Co-ordinate system of a UAV’s cellular structure.
- Central cell radius
- Beamwidth
- Beams angles
- Tiers number
- Environment type (Urban, Suburban, Rural)
- Population density
- Probability of Building Distribution
Equations (1)–(6) represent the cellular structure design using beamforming and a smart MIMO antenna.
where h denotes the UAV altitude in km, x, y and z denote the cellular footprint in three dimensions, and denote beams oriented towards a cell, and c denote a major axis, while and e denote a minor axis, 3 dB beam width in the elevation plane is denoted by and the azimuth plane is denoted by . In the cellular layout geometry, and denote cell coordinates [47]. The radial distance denotes a distance from the center cell that is below an UAV to the next cell by an azimuth angle αmn that is measured from the vertical axis m, denotes the central cell radius. m and n are considered only in the first sector of the tier, whereas for other cells this is located by rotating the structure by 60° with the same central distance [48].
3.2. Mathematical Calculation of Link Budget and AI Framework
This subsection gives a mathematical outline of both the link budget predictions, as well as the proposed AI framework. First, calculating the link budget parameters between the UAVs and ground station, either mobile and/or fixed users are presented as shown in Equations (7)–(11). These parameters help estimate connectivity, coverage, and data rate of the proposed UAV network topology.
where PL denotes path loss (dB) between UAV and a receiver, which can be a system or individual or thing, f denotes carrier frequency (GHz), d denotes distance of transmission (km), c denotes speed of light, R denotes the Earth’s radius at 6378 km, denotes UAV’s altitude, and θ is the minimum elevation angle from a receiver and/or user location, RSS denotes received signal strength (dB), Pt denotes transmitter power, Gt denotes UAV antenna gain, Gr denotes receiver antenna gain, L denotes losses, SINR denotes signal-to-interference-noise ratio (dB), N denotes noise figure (dB), I denotes interference (dB), denotes throughput (Mb/S), and B denotes bandwidth (MHz).
Using an AI framework helps in optimizing and tuning the 7 parameters of constructing a cellular cell for better wireless connectivity results. Artificial Neural Networks (ANN) are widely considered for optimization. Their purpose here is twofold: to optimize cellular cell design using SOMs unsupervised learning algorithm, which has a direct effect on link budget parameters. Then, to validate the SOMs performance using the NN fitting tool, where the key performance evaluator is a Mean Square Error (MSE) analysis.
Figure 6 and Figure 7 show the simulation of the proposed AI framework using the GUI toolbox in MATLAB [49]. Figure 6 shows the SOM layout, while Figure 7 shows the NN layout. Further, such a toolbox relies on well-recognized apps that allow us to create an app interactively, transform a script into a simple app, and build an app programmatically [50]. The mathematical representation of the proposed AI framework that includes SOM and NN fitting tool techniques is shown as per Equations (12)–(19):
where V denotes the input vector, W denotes the node’s weight vector, t denotes time-step, L denotes learning rate, which decreases with time, denotes influence rate, which is the amount of influence a node’s distance from the best-matching unit (BMU) has on its learning (always equaling 1), denotes width of the lattice at time t. H denotes a Hessian matrix, J denotes the Jacobian matrix which consists of the first values of the network errors in consideration of the assigned weights and biases that can be computed via a backpropagation technique, g denotes a gradient, e denotes a vector of network errors, xk + 1 denotes the Hessian matrix approximation of Newton’s method.
H = JTJ
g = JTe
Xk + 1 = xk − [JTJ + μI] − 1JTe
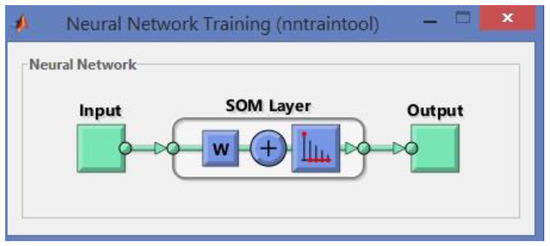
Figure 6.
SOM layout using the GUI toolbox in MATLAB.
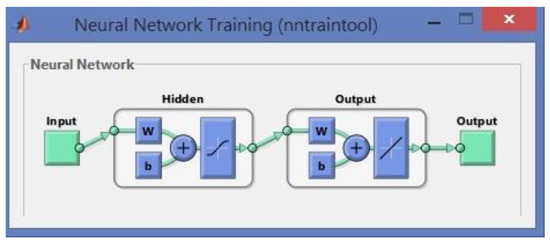
Figure 7.
NN layout using the GUI toolbox in MATLAB.
4. Discussion and Proof-of-Concept
This section validates the proposed AI framework that is used to optimize the cellular structure design of a UAV topology in the case of the Kingdom of Saudi Arabia, which is a massive country of densely and sparsely populated zones with some difficult terrain. Therefore, primary data were collected in KSA’s capital city (Riyadh) to apply the proposed framework and evaluate the performance. These data are drawn from the real scenario of current population density, tele-traffic statistics, and geographic nature [51,52].
At 20 km altitude of a UAV above the ground with a frequency ban of 28 GHz, the predictions of the proposed framework executed using MATLAB simulation are based on the algorithms that are sourced from (1) to (19). Figure 8 shows the GUI plots of the UAV’s link budget for KSA at an altitude of 20 km using a MATLAB toolbox. PL shows an increase with distance, which also affects results of RSS and T. The average PL floats just below the maximum allowable PL, which is 146.3 dB, while RSS reaches an acceptable range. An observed point is that the RSS is enhanced when increasing transmitter altitude and/or transmission power. On the other hand, T declines with increasing UAV altitude, high PL, and shadowing effects, yet T still ranges between 150 Mb/s to 105 Mb/s. The predicted results of the link budget parameters are obtained as shown in Figure 8, where these predictions were considered as input data to the intelligent AI framework to optimize and tune the cellular layout parameters.
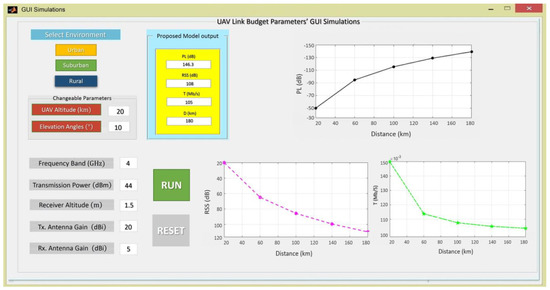
Figure 8.
UAV link budget parameters using the GUI toolbox in MATLAB.
The obtained non-optimized cellular structure design is shown in Figure 9, where the coverage of the designated area (Riyadh city in our scenario) is divided into multiple cells with almost equal size and shape within a 100 km radius. This is not efficient in terms of connectivity as well as power consumption. Thus, the expected optimized cellular structure design as shown in Figure 10 is the best scenario. There are small cells at the center and large cells at the city’s edges. This meets the demand and the nature of the city, which has a high population density in the center, and the density decreases as it moves towards the suburbs. This can lead to better connection as well as less power consumption thanks to the seven parameters that were optimized using the SOM. The axes in Figure 9 and Figure 10 are approximated to the scale of the coverage footprint radius, which is divided into a certain cellular structure layout according to input parameters.
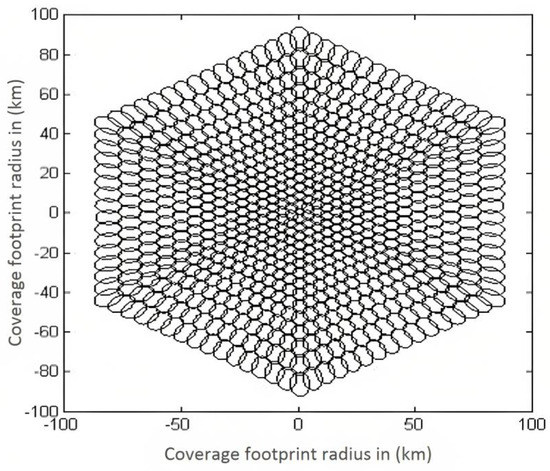
Figure 9.
Non-optimized cellular structure layout for Riyadh.
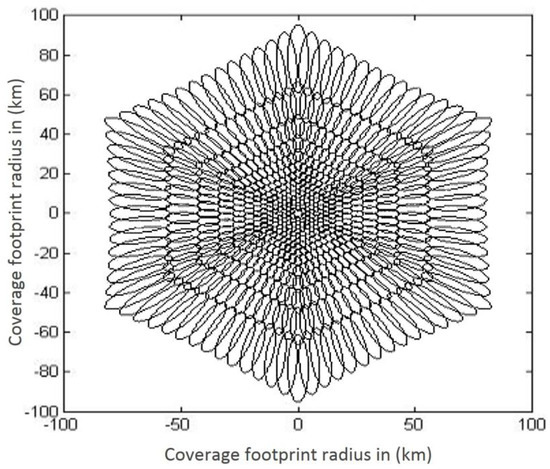
Figure 10.
Optimized cellular structure layout for Riyadh.
Another worthwhile point is that the cellular structure design is tuned not only based on population and zone size and type (urban, rural), but also based on the Quality of Service (QoS) requirements and application types such as short-term events or temporary events (e.g., sport events, natural disaster events). The onboard intelligent AI framework unit can act swiftly to meet reequipment needs, since UAVs have the advantages of high flexibility and rapid deployment.
The performance of the proposed AI framework is shown in Figure 11, Figure 12, Figure 13 and Figure 14 using the GUI toolbox in MATLAB, where the trained SOM is used to predict optimum output by relaying on a pattern recognition process that maps input to output layers. Clearly, the multi-dimensional lattice of neurons is deemed a cluster. Thus, SOM updates its winner neurons and their weights; thus, nearby neurons tend to have similar weight vectors to be responsive to similar input vectors.
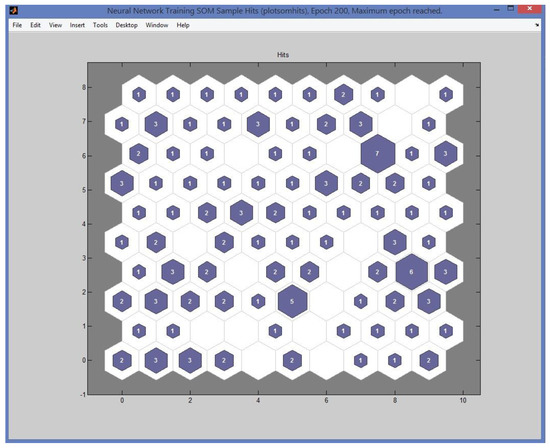
Figure 11.
SOM sample hit plot using the GUI toolbox in MATLAB.
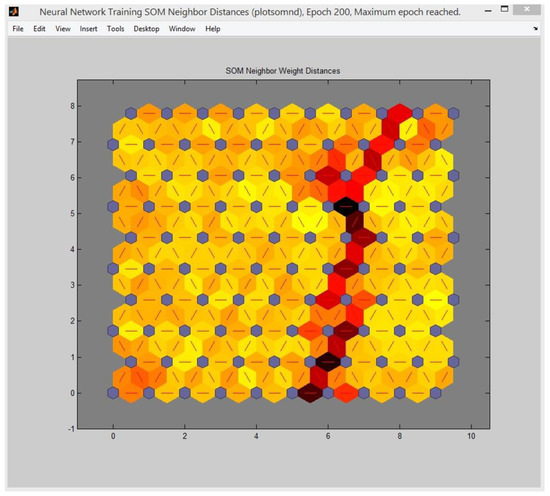
Figure 12.
SOM neighbor distance plot using the GUI toolbox in MATLAB.
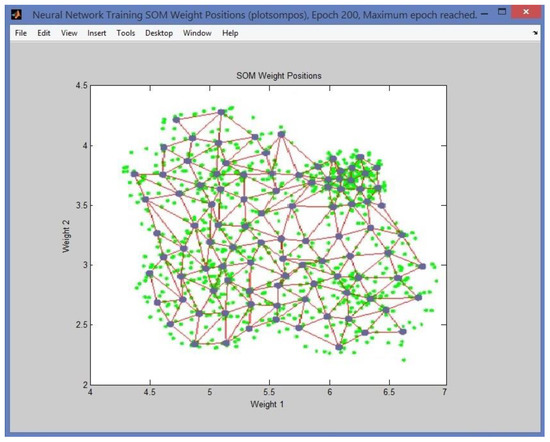
Figure 13.
SOM weight positions plot using the GUI toolbox in MATLAB.
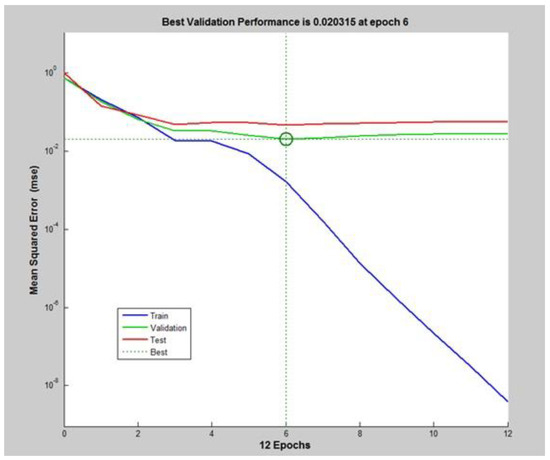
Figure 14.
NN training, testing, and validation performance.
By using the GUI in MATLAB, Figure 11 shows the SOM sample hit plot to analyze the training results, where it presents how many training samples fell into a cluster. The hexagonal topology of the SOM shows neighbor clusters that have learnt to classify similar input vectors. Gaps without hits are an indication of separation between clusters without intermediate inputs. The obtained results indicate that the maximum number of hits associated with any neuron is seven. Thus, there are seven input vectors in that cluster, which reflect the seven parameters that have been optimized using the SOM.
By using the GUI in MATLAB, Figure 12 shows the SOM neighbor distance plot. The gray hexagons indicate the neurons, while red lines connect adjacent neurons. The neighbor patches are colored from light to dark to represent how close each neuron’s weight vector is to the optimized cluster. Clearly, the darkest neuron in the SOM refers to a distinct cluster, which is located as it appears in the SOM sample, i.e., hit plot at number 7.
By using the GUI in MATLAB, Figure 13 shows the SOM weight positions plot. It is very vital that the visualizations present locations of the data points and the weight vectors, which are distributed through the input space. The green dots represent input vectors, while red lines represent the connecting adjacent neurons. The gray dots of each neuron’s weight vector represent how the SOM classifies the input space that falls into a cluster, as can be seen in the top right of Figure 13. Clearly, the SOM weight positions plot chooses the optimized cluster.
From Figure 11, Figure 12 and Figure 13, we can draw a conclusion that the optimized cluster has been well-recognized, which achieves the seven parameters that have been set to optimize the proposed model using the SOM. Figure 14 demonstrates the training, testing, and validation performance of the proposed AI framework. The obtained results show that the NN fits well for three reasons. First, the final MSE is small; second, the test set error and the validation set error have similar characteristics; third, no significant overfitting occurred in iteration 6, before which the best validation performance occurred. To note, the axes of Figure 11, Figure 12 and Figure 13 are the proportional scale of the SOM sample’s plot using the GUI toolbox in MATLAB.
5. Conclusions
The integration between the UAVs and the AI gives rise to more powerful and dynamic network topologies thanks to their advantages and capabilities. This paper presented an adaptive and intelligent cellular structure design for a UAV wireless communication topology using an AI framework, which is a noticeable shift from existing work in the literature. Three main objectives have been pursued to achieve our aim. The obtained results show that the optimized cluster has been well-recognized, which achieves the seven parameters that have been set to optimize the proposed model using the SOM and MSE. The optimized cellular structure design shows better connections as well as less power consumption in comparison to non-optimized predictions. The proposed framework is validated in a proof-of-concept scenario and the results validate that. This emphasizes a practical application for adaptable wireless communication without human intervention that can achieve an efficient and optimized automatic design. As a future work, this work can be extended after securing funds to include practical experiments, where different forms of UAVs can be built and evaluated for further analysis, including connectivity and QoS.
Author Contributions
All authors contributed equally to this work. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding for practical work.
Data Availability Statement
The data used to support the findings of this study are included within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Nair, M.M.; Tyagi, A.K.; Sreenath, N. The Future with Industry 4.0 at the Core of Society 5.0: Open Issues, Future Opportunities and Challenges. In Proceedings of the 2021 International Conference on Computer Communication and Informatics (ICCCI), Coimbatore, India, 27–29 January 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef]
- Nguyen, D.C.; Ding, M.; Pathirana, P.N.; Seneviratne, A.; Li, J.; Niyato, D.; Dobre, O.; Poor, H.V. 6G Internet of Things: A Comprehensive Survey. IEEE Internet Things J. 2021, 9, 359–383. [Google Scholar] [CrossRef]
- Higginbotham, S. Network included—[Internet of Everything]. IEEE Spectr. 2020, 57, 22–23. [Google Scholar] [CrossRef]
- Almalki, F.A.; Aljohani, M.; Algethami, M.; Soufiene, B.O. Incorporating Drone and AI to Empower Smart Journalism via Optimizing a Propagation Model. Sustainability 2022, 14, 3758. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S.; Almalki, F.A. Survey on Collaborative Smart Drones and Internet of Things for Improving Smartness of Smart Cities. IEEE Access 2019, 7, 128125–128152. [Google Scholar] [CrossRef]
- Almalki, F.A.; Soufiene, B.O. Modifying Hata-Davidson Propagation Model for Remote Sensing in Complex Environments Using a Multifactional Drone. Sensors 2022, 22, 1786. [Google Scholar] [CrossRef] [PubMed]
- Alsamhi, S.H.; Almalki, F.A.; Afghah, F.; Hawbani, A.; Shvetsov, A.V.; Lee, B.; Song, H. Drones’ Edge Intelligence Over Smart Environments in B5G: Blockchain and Federated Learning Synergy. IEEE Trans. Green Commun. Netw. 2021, 6, 295–312. [Google Scholar]
- Shrestha, R.; Bajracharya, R.; Kim, S. 6G Enabled Unmanned Aerial Vehicle Traffic Management: A Perspective. IEEE Access 2021, 9, 91119–91136. [Google Scholar] [CrossRef]
- Almalki, F.A.; Ben Othman, S. Predicting Joint Effects on CubeSats to Enhance Internet of Things in GCC Region Using Artificial Neural Network. Mob. Inf. Syst. 2021, 2021, 1827155. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Al-Dois, H.; Ben Othman, S.; Hassan, J.; Hawbani, A.; Sahal, R.; Lee, B.; Saleh, H. Machine Learning for Smart Environments in B5G Networks: Connectivity and QoS. Comput. Intell. Neurosci. 2021, 2021, 6805151. [Google Scholar] [CrossRef]
- Alhusayni, S.A.; Alsuwat, S.K.; Altalhi, S.H.; Almalki, F.A.; Alzahrani, H.S. Experimental Study of a Tethered Balloon Using 5G Antenna to Enhance Internet Connectivity. In Intelligent Computing. Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2021; Volume 285, pp. 649–663. [Google Scholar] [CrossRef]
- Khan, S.; Tafshir, N.; Alam, K.N.; Dhruba, A.R.; Khan, M.M.; Albraikan, A.A.; Almalki, F.A. Deep Learning for Ocular Disease Recognition: An Inner-Class Balance. Comput. Intell. Neurosci. 2022, 2022, 5007111. [Google Scholar] [CrossRef] [PubMed]
- Almalki, F.A.; Angelides, M.C. Autonomous flying IoT: A synergy of machine learning, digital elevation, and 3D structure change detection. Comput. Commun. 2022, 190, 154–165. [Google Scholar] [CrossRef]
- Alam, T.; Khan, A.I.; Dola, N.N.; Tazin, T.; Khan, M.M.; Albraikan, A.A.; Almalki, F.A. Comparative Analysis of Different Efficient Machine Learning Methods for Fetal Health Classification. Appl. Bionics Biomech. 2022, 2022, 6321884. [Google Scholar] [CrossRef]
- Essid, C.; Abdelhamid, C.; Almalki, F.A.; Ali, O.; Sakli, H. New MIMO Antenna with Filtration for the Future Multiuser Systems in Satellite Communications. Wirel. Commun. Mob. Comput. 2022, 2022, e1040333. [Google Scholar] [CrossRef]
- Strinati, E.C.; Barbarossa, S.; Choi, T.; Pietrabissa, A.; Giuseppi, A.; De Santis, E.; Vidal, J.; Becvar, Z.; Haustein, T.; Cassiau, N.; et al. 6G in the sky: On-demand intelligence at the edge of 3D networks (Invited paper). ETRI J. 2020, 42, 643–657. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Ma, O.; Ansari, M.S.; Lee, B. Predictive Estimation of Optimal Signal Strength from Drones Over IoT Frameworks in Smart Cities. IEEE Trans. Mob. Comput. 2021, 22, 402–416. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Ma, O.; Ansari, M.S.; Angelides, M.C. Performance optimization of tethered balloon technology for public safety and emergency communications. Telecommun. Syst. 2020, 75, 235–244. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Gapta, S.; Ansari, M.; Ma, O.; Angelides, M. Tethered Balloon Technology for Emergency Communication and Disaster Relief Deployment. Telecommun. Syst. 2019, 75, 235–244. [Google Scholar] [CrossRef]
- Hsieh, F.; Jardel, F.; Visotsky, E.; Vook, F.; Ghosh, A.; Picha, B. UAV-based Multi-cell HAPS Communication: System Design and Performance Evaluation. In Proceedings of the GLOBECOM 2020—2020 IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Almalki, F.A.; Angelides, M.C. Empirical evolution of a propagation model for low altitude platforms. In Proceedings of the 2017 Computing Conference, London, UK, 18–20 July 2017; pp. 1297–1304. [Google Scholar] [CrossRef]
- Kishk, M.; Bader, A.; Alouini, M.-S. Aerial Base Station Deployment in 6G Cellular Networks Using Tethered Drones: The Mobility and Endurance Tradeoff. IEEE Veh. Technol. Mag. 2020, 15, 103–111. [Google Scholar] [CrossRef]
- Azari, M.M.; Rosas, F.; Pollin, S. Cellular Connectivity for UAVs: Network Modeling, Performance Analysis, and Design Guidelines. IEEE Trans. Wirel. Commun. 2019, 18, 3366–3381. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y.; Guizani, M. Secure UAV Communication Networks over 5G. IEEE Wirel. Commun. 2019, 26, 114–120. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, S.; Zhang, R. Multi-Beam UAV Communication in Cellular Uplink: Cooperative Interference Cancellation and Sum-Rate Maximization. IEEE Trans. Wirel. Commun. 2019, 18, 4679–4691. [Google Scholar] [CrossRef]
- Almalki, F.A.; Angelides, M.C. Evolution of an Optimal Propagation Model for the Last Mile with Low Altitude Platforms using Machine Learning. Elsevier Comput. Commun. J. 2019, 142–143, 9–33. [Google Scholar] [CrossRef]
- Esrafilian, O.; Gangula, R.; Gesbert, D. 3D-Map Assisted UAV Trajectory Design under Cellular Connectivity Constraints. In Proceedings of the ICC 2020—IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Izydorczyk, T.; Ginard, M.M.; Svendsen, S.; Berardinelli, G.; Mogensen, P. Experimental evaluation of beamforming on UAVs in cellular systems. In Proceedings of the IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 8 November–16 December 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Song, D.; Zhai, X.B.; Liu, X.; Tan, C.W. Jointly Optimal Fair Data Collection and Trajectory Design Algorithms in UAV-Aided Cellular Networks. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, H.; Song, L.; Han, Z.; Poor, H.V. Cooperation Techniques for a Cellular Internet of Unmanned Aerial Vehicles. IEEE Wirel. Commun. 2019, 26, 167–173. [Google Scholar] [CrossRef]
- Almalki, F.A.; Angelides, M.C. Deployment of an aerial platform system for rapid restoration of communications links after a disaster: A machine learning approach. Computing 2019, 102, 829–864. [Google Scholar] [CrossRef]
- Fouda, A.; Ibrahim, A.S.; Guvenc, I.; Ghosh, M. UAV-Based In-Band Integrated Access and Backhaul for 5G Communications. In Proceedings of the IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Lu, X.; Xiao, L.; Dai, C.; Dai, H. UAV-Aided Cellular Communications with Deep Reinforcement Learning Against Jamming. IEEE Wirel. Commun. 2020, 27, 48–53. [Google Scholar] [CrossRef]
- Wu, F.; Zhang, H.; Wu, J.; Song, L. Cellular UAV-to-Device Communications: Trajectory Design and Mode Selection by Multi-Agent Deep Reinforcement Learning. IEEE Trans. Commun. 2020, 68, 4175–4189. [Google Scholar] [CrossRef]
- Tomida, A.G. Matlab Toolbox and GUI for Analyzing One-Dimensional Chaotic Maps. In Proceedings of the 2008 International Conference on Computational Sciences and Its Applications, Perugia, Italy, 30 June–3 July 2008; pp. 321–330. [Google Scholar] [CrossRef]
- Tibor, B.; Fedak, V.; Durovsky, F. Modeling and simulation of the BLDC motor in MATLAB GUI. In Proceedings of the IEEE 2011 International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 1403–1407. [Google Scholar] [CrossRef]
- Chayratsami, P. Learning Efficiency and Effectiveness of Using MATLAB GUI for a Binary Baseband Communication System. In Proceedings of the 7th World Engineering Education Forum (WEEF), Kuala Lumpur, Malaysia, 13–16 November 2017; pp. 115–119. [Google Scholar] [CrossRef]
- Kumar, A.; Perveen, S.; Singh, S.; Kumar, A.; Majhi, S.; Das, S.K. 6th Generation: Communication, Signal Processing, Advanced Infrastructure, Emerging Technologies and Challenges. In Proceedings of the 6th International Conference on Computing, Communication and Security (ICCCS), Las Vegas, NV, USA, 4–6 October 2021; pp. 1–16. [Google Scholar] [CrossRef]
- Qian, J.; Wang, J.; Jin, S. Configurable virtual MIMO via UAV swarm: Channel modeling and spatial correlation analysis. China Commun. 2022, 19, 133–145. [Google Scholar] [CrossRef]
- Almalki, F.A. Comparative and QoS Performance Analysis of Terrestrial-aerial Platforms-satellites Systems for Temporary Events. Int. J. Comput. Netw. Commun. 2019, 11, 111–133. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Al-Dois, H.; Shvetsov, A.V.; Ansari, M.S.; Hawbani, A.; Gupta, S.K.; Lee, B. Multi-Drone Edge Intelligence and SAR Smart Wearable Devices for Emergency Communication. Wirel. Commun. Mob. Comput. 2021, 2021, 6710074. [Google Scholar] [CrossRef]
- Salh, A.; Audah, L.; Kim, K.S.; Alsamhi, S.H.; Alhartomi, M.A.; Abdullah, Q.; Almalki, F.A.; Algethami, H. Refiner GAN Algorithmically Enabled Deep-RL for Guaranteed Traffic Packets in Real-Time URLLC B5G Communication Systems. IEEE Access 2022, 10, 50662–50676. [Google Scholar] [CrossRef]
- Dicandia, F.A.; Fonseca, N.J.G.; Bacco, M.; Mugnaini, S.; Genovesi, S. Space-Air-Ground Integrated 6G Wireless Communication Networks: A Review of Antenna Technologies and Application Scenarios. Sensors 2022, 22, 3136. [Google Scholar] [CrossRef] [PubMed]
- Chaudhri, S.N.; Rajput, N.S.; Alsamhi, S.H.; Shvetsov, A.V.; Almalki, F.A. Zero-Padding and Spatial Augmentation-Based Gas Sensor Node Optimization Approach in Resource-Constrained 6G-IoT Paradigm. Sensors 2022, 22, 3039. [Google Scholar] [CrossRef]
- Dajer, M.; Ma, Z.; Piazzi, L.; Prasad, N.; Qi, X.-F.; Sheen, B.; Yang, J.; Yue, G. Reconfigurable intelligent surface: Design the channel—A new opportunity for future wireless networks. Digit. Commun. Netw. 2021, 8, 87–104. [Google Scholar] [CrossRef]
- Fang, X.; Feng, W.; Wei, T.; Chen, Y.; Ge, N.; Wang, C.-X. 5G Embraces Satellites for 6G Ubiquitous IoT: Basic Models for Integrated Satellite Terrestrial Networks. IEEE Internet Things J. 2021, 8, 14399–14417. [Google Scholar] [CrossRef]
- Salh, A.; Audah, L.; Alhartomi, M.A.; Kim, K.S.; Alsamhi, S.H.; Almalki, F.A.; Abdullah, Q.; Saif, A.; Algethami, H. Smart Packet Transmission Scheduling in Cognitive IoT Systems: DDQN Based Approach. IEEE Access 2022, 10, 50023–50036. [Google Scholar] [CrossRef]
- Junior, P.O.; Conte, S.; D’Addona, D.M.; Aguiar, P.; Bapstista, F. An improved impedance-based damage classification using Self-Organizing Maps. Procedia CIRP 2020, 88, 330–334. [Google Scholar] [CrossRef]
- Astudillo, C.A.; Oommen, B.J. Topology-oriented self-organizing maps: A survey. Pattern Anal. Appl. 2014, 17, 223–248. [Google Scholar] [CrossRef]
- General Authority for Statistics. Available online: https://www.stats.gov.sa/en (accessed on 16 May 2022).
- Communications and Information Technology Commission. Available online: https://www.citc.gov.sa/en/Pages/default.aspx (accessed on 16 May 2022).














Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).