1. Introduction
Generalized or Extended Finite Element Methods (GFEM/XFEM) augment the standard FEM with special functions that mimic local features of exact solutions to solve complicated non-smooth engineering problems [
1,
2,
3,
4]. The applications of GFEM/XFEM to typical fields, such as crack problems, interface problems, and material failures are referred to [
3,
5,
6,
7,
8,
9,
10,
11,
12,
13]. Both GFEM and XFEM are based on a partition of unity [
14,
15,
16] to “paste” the local special functions. We will use GFEM to represent the GFEM/XFEM below for simplicity. The GFEM has been extensively applied to the interface problem, including elliptic interface problems [
11,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28] and time-dependent interface problems [
9,
29,
30,
31,
32,
33,
34]. Meshes used in the GFEM are simple, fixed, and independent of the location of interfaces so that remeshing or mesh refinement for the FEM are avoided in the GFEM.
It was realized quite early that the GFEM has a conditioning difficulty in that condition numbers of stiffness matrices may be much larger than those of the standard FEM, and the conditioning may get extremely bad as the interfaces approach the boundaries of elements. The bad conditioning is mainly caused by almost linear dependence between the FE functions and added special functions. Many interesting ideas have been proposed for the conditioning of GFEM, such as (a) locally adapting positions of either nodes or interface curves [
32,
35], preconditioning the stiffness matrices by employing domain decomposition [
36], local Cholesky decomposition [
5], condensing DOFs at certain nodes [
37], and modifying the enriched functions based on orthogonalization [
38]. Recently, a stable GFEM (SGFEM) was introduced in [
1,
6,
39] to improve the conditioning of GFEM. The main idea of SGFEM is to modify enriched functions by subtracting its FE interpolant. The SGFEM has been applied to the crack problem [
6,
7,
8] and interface problems [
1,
17,
20,
23,
32,
40]. The SGFEM for interface problems is proven to have the optimal convergence in [
1,
20], and the conditioning is of the same order as that of the FEM and does not deteriorate as the interfaces approach the boundaries of elements.
To the best of our knowledge, the SGFEM has been developed only for continuous interface problems. Interface problems can be categorized as continuous and discontinuous interface problems (CIPs/DIPs), characterized by
and
, respectively, where
u is a solution to an interface problem with interface
, and
is a jump of
u across the interface
. Both cases have many applications (see [
11,
22,
23,
32,
34,
41,
42] for CIPs, [
10,
30,
43,
44,
45,
46] for DIPs). The shape functions in the SGFEM (also in some GFEM [
3,
9,
11,
17,
20,
23,
25,
31,
32,
34,
41,
42,
47]) for the interface problem are continuous. Thus, the SGFEM can provide conforming approximations for CIPs. However, the continuous shape functions cannot be used directly for the DIP, and penalty techniques need to be employed typically [
19,
30,
48]. We stress that many of the unfitted FEM or GFEM introduce penalty techniques and parameters to solve the CIP, such as [
11,
34,
41,
42]. It is possible to propose an SGFEM for DIPs by changing the enrichments and using the penalty technique above-mentioned. However, the penalty parameters are generally problem-dependent and difficult to choose in a uniform approach.
In this paper, we tend to design the SGFEM for DIPs free from penalty terms and parameters. The main idea is to transform a DIP into an equivalent CIP [
45,
46,
49]. This can be achieved by deriving a function
such that the modified solution
satisfies the continuity condition
. Unfortunately, such a
is hard to construct, especially in the high dimensions where the interface has complex geometric shapes [
45,
49]. We construct such
using the DNN. Then, the SGFEM for the CIP coupled with such
is proposed for the DIP. This idea is motivated by recent pioneer research about solving partial differential equations (PDEs) using the DNN [
50,
51,
52,
53,
54,
55,
56,
57]. We mention that the DNN has also been applied to many engineering problems, for instance, energy approach [
58], failure models and predictions [
59,
60,
61]. We take a Poisson equation
in a domain
, for example, which has an essential boundary condition
on
. The DNN for PDEs [
53,
54,
55,
57] is to minimize a loss function
using a certain DNN architecture, where
is a parameter to balance the two terms in (
1). The DNN method based on (
1) is not convex, and does not show the convergence rate [
53,
55]. In addition, the essential boundary condition affects the accuracy DNN [
53], and
has to be selected carefully. To resolve the essential boundary condition, in [
52,
54,
55], a small DNN is used to minimize the boundary term in (
1), and then the PDE is transformed to an equivalent PDE with the (approximately) zero boundary condition, which is solved by another DNN. The small DNN function is defined in the whole domain
, but only the values on
are needed in the training process. Thus, such a DNN has a dimension number that is one dimension less than that of
and can approximate the boundary function efficiently, especially when the boundary
has complex geometries [
52,
54,
55]. This idea is adopted in this paper to address the discontinuous interface condition, i.e.,
.
Specifically, we first use a small DNN to produce a function
(defined in
) by learning the discontinuous condition
such that
. As reported in [
52,
54,
55], the jump
can be “learned” accurately and efficiently by the DNN. Then, the DIP is transformed to an (approximately) equivalent CIP based on
, which the SGFEM can solve for the CIP. The DNN function
can be efficiently incorporated into the SGFEM framework because its differentiations are computed automatically. Since
does not equal
exactly, there is a conforming error in the SGFEM solution (combined with the DNN function
). This error is analyzed and proven mathematically, which indicates that the proposed SGFEM yields the optimal convergence for the DIP if the interface condition can be learned exactly enough. A set of numerical experiments verifies the theoretical results. It is known that the DNN possesses remarkable merits in solving high-dimensional problems and nonlinear approximations. Therefore, the proposed SGFEM in this paper has a great potential for the three-dimensional DIP with interfaces of complex geometries.
The paper is organized as follows. The model problem is described in
Section 2. Conventional GFEM and SGFEM are reviewed in
Section 3. The proposed SGFEM coupled with the DNN is proposed for the DIP in
Section 4. In
Section 5, we analyze the approximation error of the proposed method mathematically. The numerical experiments and concluding remarks are presented in
Section 6 and
Section 7, respectively.
2. Model Problem
For a domain in , an integer m, and , we denote the usual Sobolev spaces as with norm and semi-norm . The space will be represented by for and when , respectively.
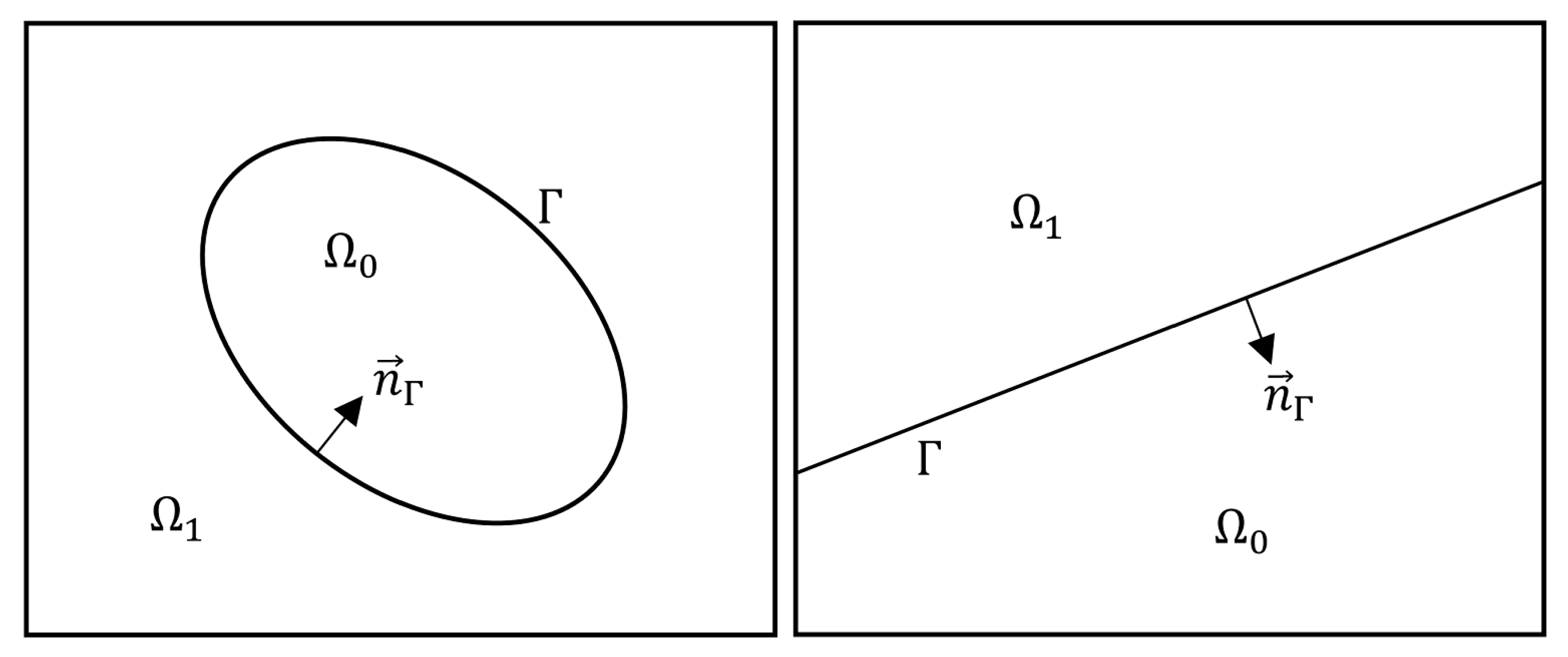
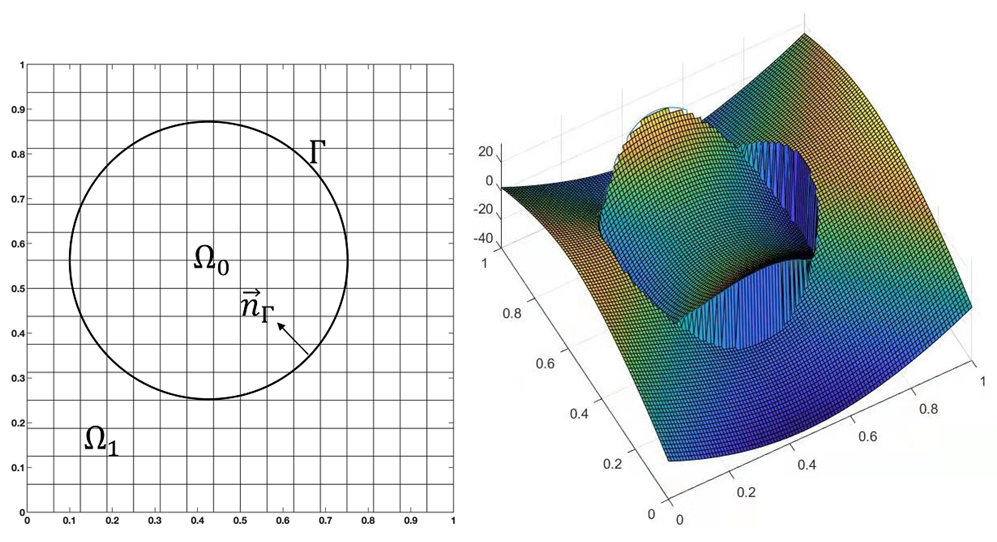
We consider a bounded and simply connected domain
with a piecewise smooth boundary
. Let
be an interface that divides
into two domains
and
such that
,
, and
. In this study, we consider smooth interfaces
, as shown in
Figure 1.
A point in the Cartesian coordinate system of
is denoted as
. Let
a be a positive, piecewise-constant function given by
where
and
are positive constants,
, and
. Clearly,
a is discontinuous along the interface
.
We are interested in the solution
u of the interface problem:
subject to non-homogeneous jump conditions on the interface
where
and
denote the unit outward normal to the boundary
and the interface
directed towards
, respectively. The notation
defines the jump of a quantity
v along the interface
, where
. We mention that if the boundary
contains a re-entrant corner,
u may be singular and may not belong to
. However, we do not discuss such a situation in this paper and limit the setting to the case
, as in [
42,
45,
47]. Therefore, we assume that the boundary
and the data
,
are given such that the solution
, where
is defined by
with a norm
The interface condition (
4) has an essential effect on the features of the solution and constructions of numerical algorithms. The problem (
3)–(5) is referred to as a CIP and a DIP if
in (
4) is zero and nonzero, respectively. Both the CIP and DIP have many applications, see [
11,
22,
23,
32,
34,
41,
42] for the CIP and [
10,
30,
43,
44,
45,
46] for the DIP. The SGFEM was proposed for the CIP to provide conforming approximations [
17,
20,
23,
27,
40]. In this paper, the SGFEM is generalized to the DIP in a conforming approach that is free from any penalty terms.
3. Conventional Gfem and Sgfem for Interface Problems
We begin with a quasi-uniform finite element mesh
of the domain
with mesh size
, where the finite elements
can be triangles or quadrilaterals. We note that the mesh
does not need to match the interface
. Let
be the set of finite element nodes associated with the mesh
, where
is the index set of the nodes. For every
, we consider the standard linear (bilinear for quadrilateral element) finite element hat function
. The closure of support of
is denoted by
, which is called the patch associated with the node
. Since the mesh is quasi-uniform, we assume that
where the positive constant
C is independent of
h and
i. It is well known that
form a partition of unity (PU) [
14,
15,
16] subordinate to the patches
.
The standard FEM subspace to approximate the solution of (
3) is given by
The FEM yields highly accurate approximations only if the underlying variational problem has a smooth solution. However, it is also well known that an FEM with a quasi-uniform mesh cannot approximate the solution of the interface problem efficiently [
23,
47].
The generalized or extended FEM (GFEM) [
2,
3] is a typical technique to approximate the non-smooth solutions to variational problems. The approximation space
of GFEM is obtained by augmenting the finite element space
by non-polynomial enrichment space
using the enrichment functions
as follows:
where the enrichment functions
are problem-dependent and mimic the non-smooth exact solutions of the underlying variational problem. The nodes indexed by
, are called the enriched nodes. The choice of
can vary and may also be problem-dependent.
The enrichment functions
used in the GFEM to approximate the solution of a smooth interface problem are generally based on a distance function (or absolute of level set function) [
3,
18,
23]
In a conventional GFEM for the interface problems, the approximate subspace is
and
The GFEM based on
is referred to as a topological GFEM [
3]. It was known early (e.g., [
23]) that the topological GFEM only produces the convergence order
in energy norm, which is not optimal
. The optimal convergence can be attained by the geometric GFEM [
3,
23] and corrected GFEM [
3,
22]. However, the geometric GFEM introduces many more enriched degrees of freedom (DOFs) than the topological ones, and its conditioning is of
[
23] that is much higher than that of the FEM. Meanwhile, the conditioning of the corrected GFEM may not be stable because it may “blow up” as the interface
is close to the nodes of the mesh [
27].
Recently, a simple local procedure of
subtracting the interpolant was introduced in [
1,
6,
17,
20,
23,
39,
40] to address the bad conditioning of GFEM, and the modified GFEM is referred to as a stable GFEM (SGFEM). Specifically, the approximate subspace of the SGFEM for the interface problems is given by
where
is the FEM interpolant of a continuous function
f based on
. It was shown [
17] that the SGFEM (
12) for the
elliptic interface (a) reaches the optimal convergence order
in energy norm, (b) has a scaled condition number (SCN) of stiffness matrices
that is of the same order as the FEM, and (c) is robust in that the convergence and SCN do not depend on the relative positions of the mesh and interfaces.
Remark 1. We mention that there are other options for the enrichments of the GFEM of the interface problems, such as [11,41,48], whereis used as the enrichments, and H is the Heaviside function 1 in and in . This scheme leads to a non-conforming formulation because of the discontinuity of H. A penalty technique needs to be developed to deal with discontinuity. This paper presents conforming methods in which the variational formulations are standard without any penalty terms or parameters. We next illustrate the scaled condition number (SCN) of the stiffness matrices of the GFEM or SGFEM. For simplicity, we re-arrange the order of the shape functions so that the stiffness or mass matrices
of GFEM have the form
where
and
are associated with the FE part and the enrichment part of GFEM or SGFEM, respectively. We note that
is the standard finite element matrix with respect to the standard finite element triangulation used to define the GFEM. Consider the matrix
where
and
are diagonal matrices with
We define
and
. The SCNs of
and
are defined by
respectively, where
is a condition number of a matrix
. It is known that
for the stiffness matrices of FEM.
The relevant difficulties of GFEM consist of (i) stability:
may be much bigger than
, and (ii) robustness:
may blow up as the interfaces are close to the boundaries of elements [
1,
2,
3,
23]. These are caused by the almost linear dependence of subspaces
and
. The SGFEM is the stable and robust GFEM, and has been applied to crack and interface problems successfully [
1,
6,
17,
20,
23,
39,
40].
The convergence of SGFEM for the CIP
The SGFEM for the CIP has been studied in [
17,
23,
27,
40], and the associated variational formulation based on the SGFEM space (
12) is as follows:
where
We define
to be the energy space with respect to the CIP given by
It is obvious that
(
12) belongs to
. The convergence of
to
u was proven in [
17,
27,
40], and we present it here without its proof.
Theorem 1. Suppose that is the solution of the CIP ((3)–(5) with ), and is the SGFEM solution of (15) based on the finite-dimensional subspace (12), then there exists independent of h such that In the next section, the SGFEM of the CIP is generalized to the DIP in a conforming approach that is free from any penalty terms by coupling a DNN.
4. Sgfem Coupled with Dnn for Dip
We first employ the DNN to learn a function that approximates the discontinuous interface condition. Then, by coupling with the DNN function, we reformulate the DIP into an (approximately) equivalent continuous model, which can be solved by SGFEM.
Let
be a function in
with
Define
to be a function on
as
then
satisfies the interface problem (
4) because
. Define a function
, then
It is easy to check that the
satisfies the continuous interface problem, i.e.,
. The model problem (
3) with the discontinuous interface conditions (
4) and (5) is transformed into an equivalent equation about
with the continuous interface condition:
We note that the RHSs of (23)–(25) can be simplified because
in
, for instance, in the boundary condition (24)
if
. The variational formula of (23)–(25) is the following:
where
and
and
are defined in (
16) and (
17), respectively. Note that in the second equality of (
27)
is directed towards to
.
We note that
in variational formula (
26) depends on the unknown
, and cannot be calculated. It is easy to see that the evaluations of
on
(
19) rather than in
are essential for the derivation of the equivalent CIP (23)–(25). This leads us to construct a function
(defined in
) using a DNN such that
mimics the condition (
19) with high precision, where
are parameters in the DNN algorithm. Such a
is available, and the associated variational formula is solvable.
To this end, we take
sampling points
uniformly distributed on
. Let
and
be the input and output sets, respectively, for training the DNN. The loss function for training the DNN is defined
where
is a subspace (defined in
) generated by a DNN with parameters
;
are the weights and bias in the DNN, respectively. A DNN function
with certain parameter
is obtained by solving the following minimization problem-based loss function (
28):
belongs to
if the aviation function is chosen as the Sigmoid function [
62,
63].
Similar with the definition of
(
20) we define a function on
as
and the variational formula based on
is proposed as follows:
where
and the function
serves as the approximation solution to
u. We stress that (
31) is not equivalent to the initial problem (
3) exactly because according to (
28) and (
29),
This conforming error will be analyzed in the next section.
Unlike the variational problem (
26), the problem (
31) is computable because
is obtained using the DNN. The problem (
31) is discretized using the SGFEM subspace for the CIP, and the associated variational problem is
Finally,
serves as the approximation solution to the initial problem (
3), and the approximation error of
will be analyzed mathematically in the next section. The formula (
33) is called the SGFEM coupled with the DNN for the DIP due to the introduction of the DNN function
.
Remark 2. The idea to transform the DIP into a CIP using the DNN is motivated by [52,54,55]. In [52,54,55], non-homogeneous boundary conditions are transformed into homogeneous ones using a shallow DNN, and the associated (approximately) homogeneous equations are solved by another DNN. This approach has advantages over conventional methods (e.g., FEM, GFEM) in that it is meshless and can solve problems with boundaries of complex geometries, and is powerful for high-dimensional problems. We couple the SGFEM for the CIP with the shallow DNN to address the DIP in this paper. We achieve that (a) all the advantages of SGFEM are maintained for the DIP, (b) the proposed SGFEM for the DIP is a conforming method free from any penalty terms, and (c) the method has great potential for geometrically complex interfaces, especially in three dimensions (reported in a forthcoming study). We analyze the computational costs of the proposed method (
33). First, the stiffness matrices of (
33) are exactly the same as those of SGFEM for the CIP, and only the RHS (
32) of (
33) needs to be treated. Therefore, the assembling of stiffness matrices and the construction of RHS can be implemented separately or in parallel. Second, the computational dimension of learning
based on (
29) is one dimension less than the space dimension because the sampling points are located in the interface curve, and the learning time is very little in comparison with the assembling of stiffness matrices. Moreover, automatic differentiations are available in the existing DNN frameworks to save computational time. Therefore the proposed SGFEM coupled with the DNN is computationally efficient.
At the end of this section, we describe the structure of DNN used in (
28) and (
29). The DNN in this paper is a deep residual network (ResNet) [
53,
64,
65] based on the full connection layers. Such a network structure was adopted in [
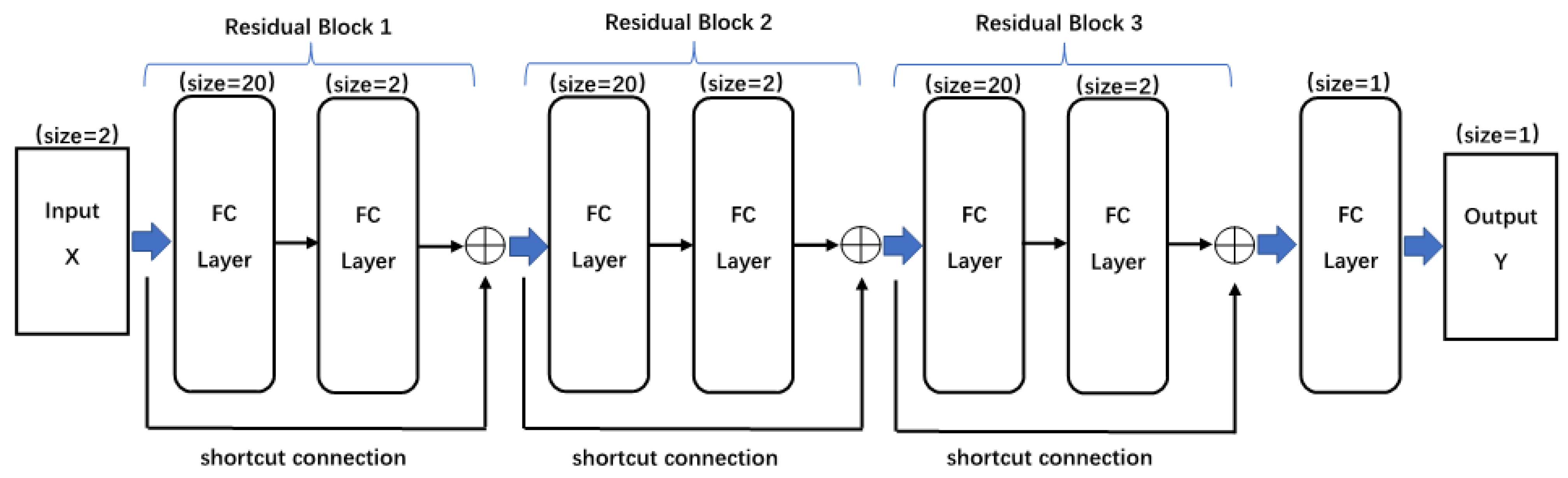
53] to solve the PDEs. The ResNet is an improvement of the conventional DNN. The ResNet can fit high-dimensional functions better, and the fitting ability is not affected by network width. The ResNet can significantly speed training, increase pre-precision, reduce network degradation, and improve network characterization ability.
The ResNet was formally proposed in [
64], which is obtained by stacking the residual blocks continuously. Each residual block has consisted of two fully connected layers, and its output is obtained by adding the output of the last layer and the input of the residual block. This structure leads to significant improvement in the training speed and approximation error. Let
l be a positive integer. We set that there are
l neurons in each layer of ResNet. Let
be the vector consisted by excitation values of the
l neurons in
i-th layer,
be a
weighted matrix, and
be a real vector. Furthermore, let
be an activation function. In a ResNet, the vectors
and
satisfy
where
is called the bias term. Let
,
. Let
be the output of
j-th residual block, which satisfies that
Let
,
. The relationship between the input
X and output
Y of the ResNet with
N residual blocks is
In our computations, we use a ResNet with three such blocks, see
Figure 2. The parameters
and
for
are derived by solving the minimization problem (
29) based on the loss function (
28). These parameters are updated using the back propagation algorithm based on gradients of the loss function with respect to the parameters. In this paper, we use the stochastic gradient descent (SGD) method [
66,
67] for solving (
29). The sigmoid function [
62,
63] serves as the activation function.
5. Convergence Analysis
We prove the convergence of the SGFEM solution coupled with the DNN,
, in this section. The approximation error of
involves two parts: the SGFEM error and the learning error of DNN. For any
(see (
6)), let
then
. Since we consider
is smooth,
and
can be continuously extended to the whole domain
to obtain functions
and
in
such that
where
C is a positive constant independent of
h (see Theorem 1.4.5 in [
68]).
Let
represent the learning error level of
, i.e.,
We first establish a relevant approximation result.
Lemma 1. Suppose and , then there is satisfying such thatwhere C is a constant independent of ε and k. Proof. We divide
using a quasi-uniform mesh fitting the interface
. The mesh-size parameter is denoted by
l. We note that such a mesh is used only for obtaining associated estimates, and not used for actual computation. Let
and
,
be the FE nodes and FE functions of degree
k associated with the mesh, respectively, and
be the standard FE interpolant of
w. The index set
is divided into
and
, which consist of indices of nodes on the interface
and in the interior of
, respectively. It is easy to know that
belongs to
and satisfies
. Based on the error estimate of FEM interpolation [
68] we have
where the last inequality is because the number of nodes on
,
, is
. Then letting
in (
37) yields
Let
, then we obtain the desired estimate (
36) from (
38). □
Theorem 2. Suppose that is the solution to (3)–(5), and is the SGFEM approximation of u, where is the solution of associated CIP (33), and is the DNN function (30) that approximates the discontinuous jump ϕ. The learning error level of is represented in (35). Let defined in (20) belongs to . Then there is a constant C that is independent of h, k, and ε such thatwhere is defined in (31). Proof. Remembering that
we have
According to (
26) and (
31) we obtain
and thus
Therefore, for arbitrary
Eliminating
on both sides of (
41) we have
Let
which also belongs to
. Hence, we obtain from (
42) that
Based on the learning error (
35) and Lemma 1, there is a
such that
On the other hand, it is noted that
in (
33) is the SGFEM solution to the CIP (
31). Then according to the approximation result (
18) for the CIP in Theorem 1 we have
Finally, we obtain from the estimates (
40), (
44), and (
45)
which is the desired result (
39). □
In (
39)
only needs the evaluations on
, i.e.,
, while its evaluations on
are not required specifically. Therefore, the term
in (
39) can be replaced by
which could be small. In (
39)
k at least equals to 1, i.e.,
. In fact, let
, where
and
are the extensions of
and
(
34), respectively, then
and
. We mention that for the interface problem where
and
are relatively smooth,
could have higher smoothness in
, i.e,
. Theorem 2 means that the proposed SGFEM coupled with the DNN can obtain the optimal energy error
if the DNN function
learns
(
) on the interface
(not in the domains
and
) accurately sufficiently, see (
35). In the numerical experiments below, the optimal errors
are observed for the same discretization parameters
h as those in the SGFEM for the CIP.
6. Numerical Results
We consider the model problem (
3) in a domain
with straight and curved interfaces
for the numerical experiments. We test two cases of coefficients
: (i)
and
, and (ii)
and
. Their contrasts are
and
, respectively. The manufactured exact solution
u of (
3) will be employed in the tests. The loading functions
of (
3), the jump
(
4), and the flux
(5) can be calculated by using Equation (
3) and the manufactured exact solution
u.
The uniform square FE mesh is used to discretize the domain with the mesh parameter . The nodes associated with the mesh are denoted by , where is the index set. Let be the bilinear FE functions associated with the nodes .
We will test the standard FEM (
8) and SGFEM (
12) on the square mesh for the DIP, based on the variational formulation (
31) incorporating the DNN function (
20). We do not present the results of other GFEMs, such as the geometric and corrected GFEM. In the geometric GFEM, the SCN is of order
[
23], which is much bigger than that of SGFEM. The corrected GFEM is not robust in the sense that the SCN gets bad as interface curves approach boundaries of elements [
27]. We compute and compare the relative error of these methods in the energy norm (EE). The SCN of SGFEM has been shown to be of order
in [
27], and we do not repeat it in this paper because the stiffness matrices for the DIP are the same as those for the CIP.
Setting for ResNet. As described at the end of
Section 4, we use the ResNet for the DNN coupling in the tests. The ResNet structure consists of three residual blocks, each of which contains two full connection layers and one residual item, where each layer contains 20 neurons, see
Figure 2. The sigmoid function [
62,
63] serves as the activation function. We use the stochastic gradient descent (SGD) method [
66,
67] for solving (
29) in the learning process. The learning rate, the batch number, the number
of sampling points on
for training the ResNet will be specified in the following Subsections.
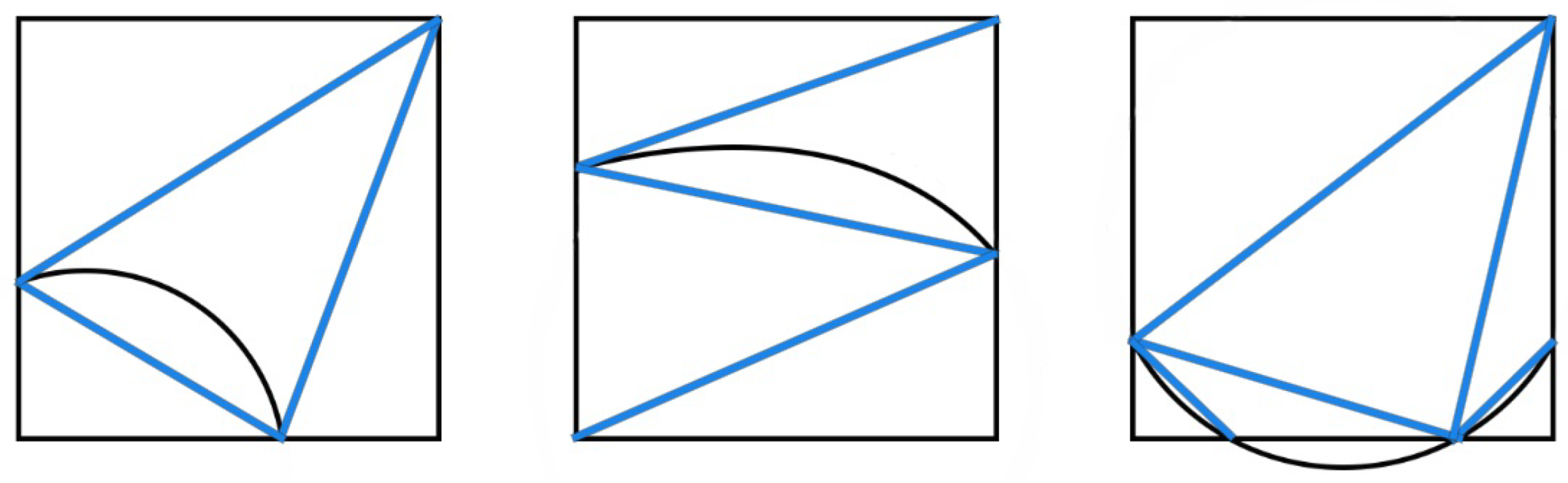
Integration for discontinuous enrichments. We describe the numerical integration formula used in the computations. For elements that do not intersect the interface, we employ the standard
Gaussian rule. For elements cut by the interface, we connect the intersection points of the interface and the boundaries of an element by a straight line, and decompose the element into 4 to 6 sub-triangles, on each of which the standard 12-point Gaussian rule for triangles is employed. See
Figure 3 for an example. We mention that a systematic study of the effect of numerical integration is not the objective of this work. We refer to for more details about the numerical integrations for the interface problems [
3,
5,
22,
69].
We now present our numerical results in the following sub-sections.
6.1. A Straight Interface Situation
We first consider a straight interface
, which has an equation
with
and
. The manufactured solution of (
3) is as follows:
where
, and
is the polar coordinate at the center
. It can be checked that
u is continuous across the interface
when
. In this example we take
and
, and
u is discontinuous across
, i.e.,
(see (
4)) and also the jump of flux
(5). The mesh on the domain
is refined with
. The interface
and a mesh with
are shown in
Figure 4 Left, and the exact solution
u with
and
is drawn in
Figure 4 Right.
The number of sampling points uniformly for training the ResNet,
, is taken as 200 in this situation. The learning rate
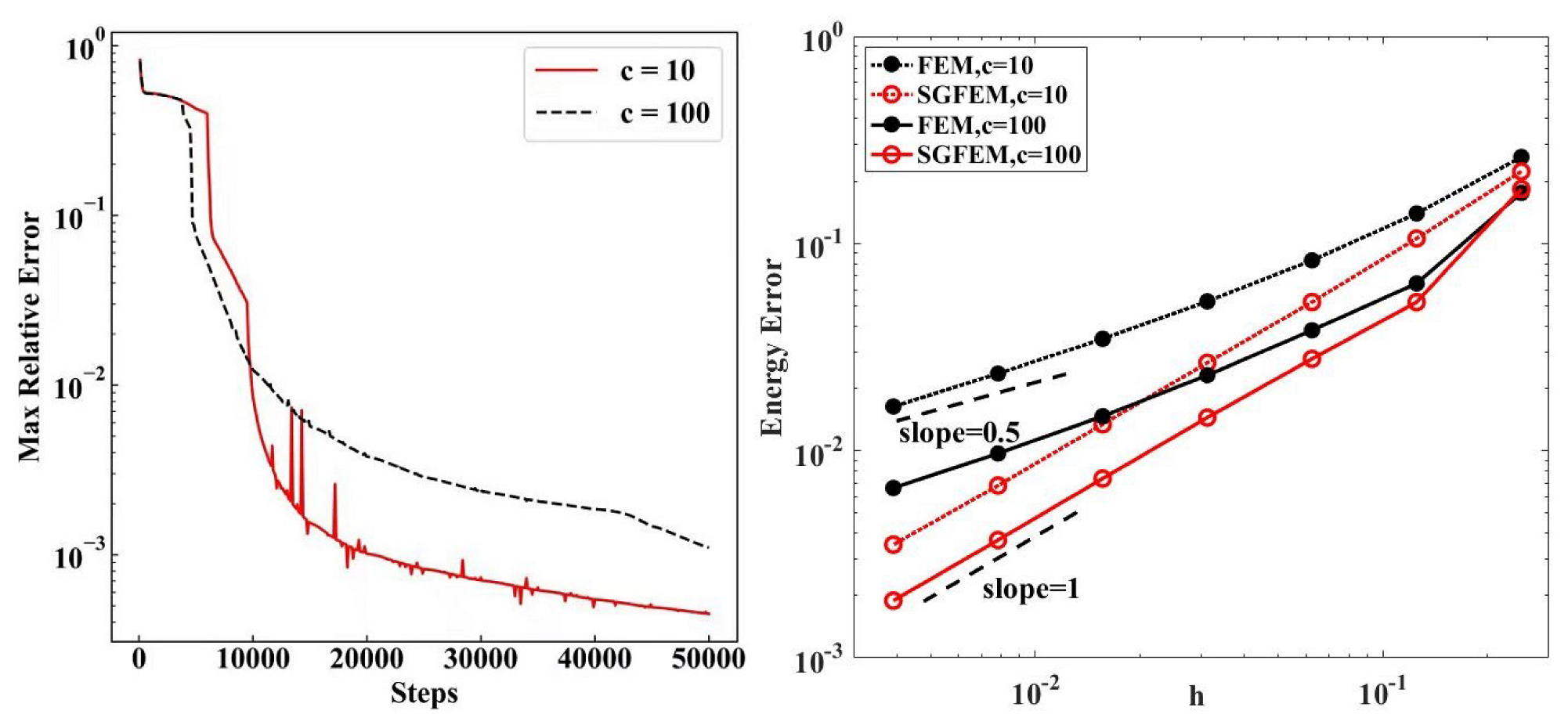
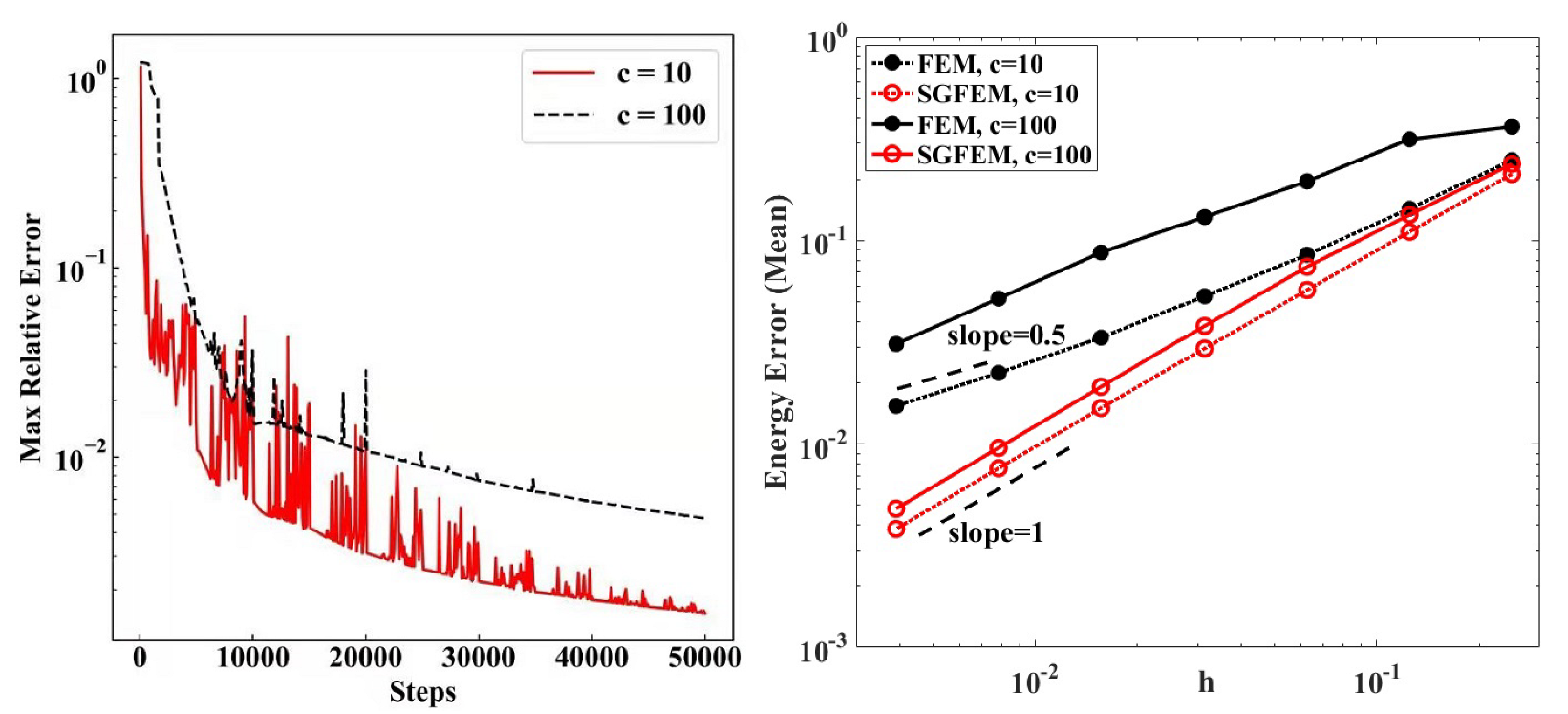
, and the batch number is 4096. The maximum relative error of DNN function
(
30) to the jump
on
, defined as
with respect to the iteration steps of SGD, is shown in
Figure 5 Left. It shows that the error of the DNN function
is reduced by increasing the iteration steps of SGD. We also observed this by testing the different learning rates and batch numbers, and we do not exhibit them here. Therefore, it is easy to learn a DNN function
to reach the desired error level
(
35) in the Theorem 2 (
39). Such an
is small enough for the SGFEM to obtain the optimal energy error convergence order
, see below for the energy errors.
The energy errors with respect to
h of the FEM and SGFEM coupled with the DNN, are presented in
Figure 5 Right for different contrasts
c (10 and 100), where
. It is shown in
Figure 5 Right that the convergence orders of the FEM and SGFEM are
and
, respectively. Therefore, it is concluded from this set of numerical experiments that the proposed SGFEM reaches the optimal convergence order for such a DIP, as predicted in the Theorem 2 (when
is small).
6.2. A Curved Interface Situation
We next consider a curved interface
with an equation
, where
. In this case we consider the manufactured solution of (
3) as follows:
where
is the polar coordinate at the center
. It can be verified that
u is continuous across
for
. In this test, we take
, and
is non-zero. The interface
and a mesh with
are shown in
Figure 6 Left, and the exact solution
u with
and
is drawn in
Figure 6 Right. The mesh on the domain
is refined with
.
The number of sampling points uniformly for training the ResNet,
, is taken as 500 in this situation. The learning rate
, and the batch number is 4096. The maximum relative error (
46) of DNN function
(
30) to the jump
on
with respect to the iteration steps of SGD, is shown in
Figure 7 Left. It shows that the error of the DNN function is reduced by increasing the iteration steps of SGD. We also observe this by testing the different learning rates and batch numbers, and we do not exhibit them here. Therefore, it is easy to obtain a DNN function
to reach the small error level
in the Theorem 2.
We note that the DNN used in this paper is a stochastic method due to the SGD. In this example, to test the robustness of proposed method, we implement the learning algorithm (
29) five times to generate the DNN functions
(
30),
. For each
, the energy errors
with respect to
h of the coupled FEM and SGFEM are computed from (
33). The means and standard deviations (STD) of these errors are defined by
with respect to
h of the FEM and SGFEM are presented in
Figure 7 Right for different contrasts
c (10 and 100).
and
with respect to
h of SGFEM are listed in
Table 1.
Figure 7 Right clearly shows that the convergence orders of the error means of FEM and SGFEM are still
and
, respectively, as predicted. It is observed in
Table 1 that the STDs of
are at relatively low levels. These mean that the optimal convergence order, in this case, can also be obtained by the proposed SGFEM, and moreover, the proposed SGFEM exhibits nice robustness with respect to the randomness of the DNN method. We also obtained similar results by testing the different curved interfaces with discontinuous solutions, and we do not present them here.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}