
A Three-Phase Fundamental Diagram from Three-Dimensional Traffic Data

 ,
,
Abstract
1. Introduction
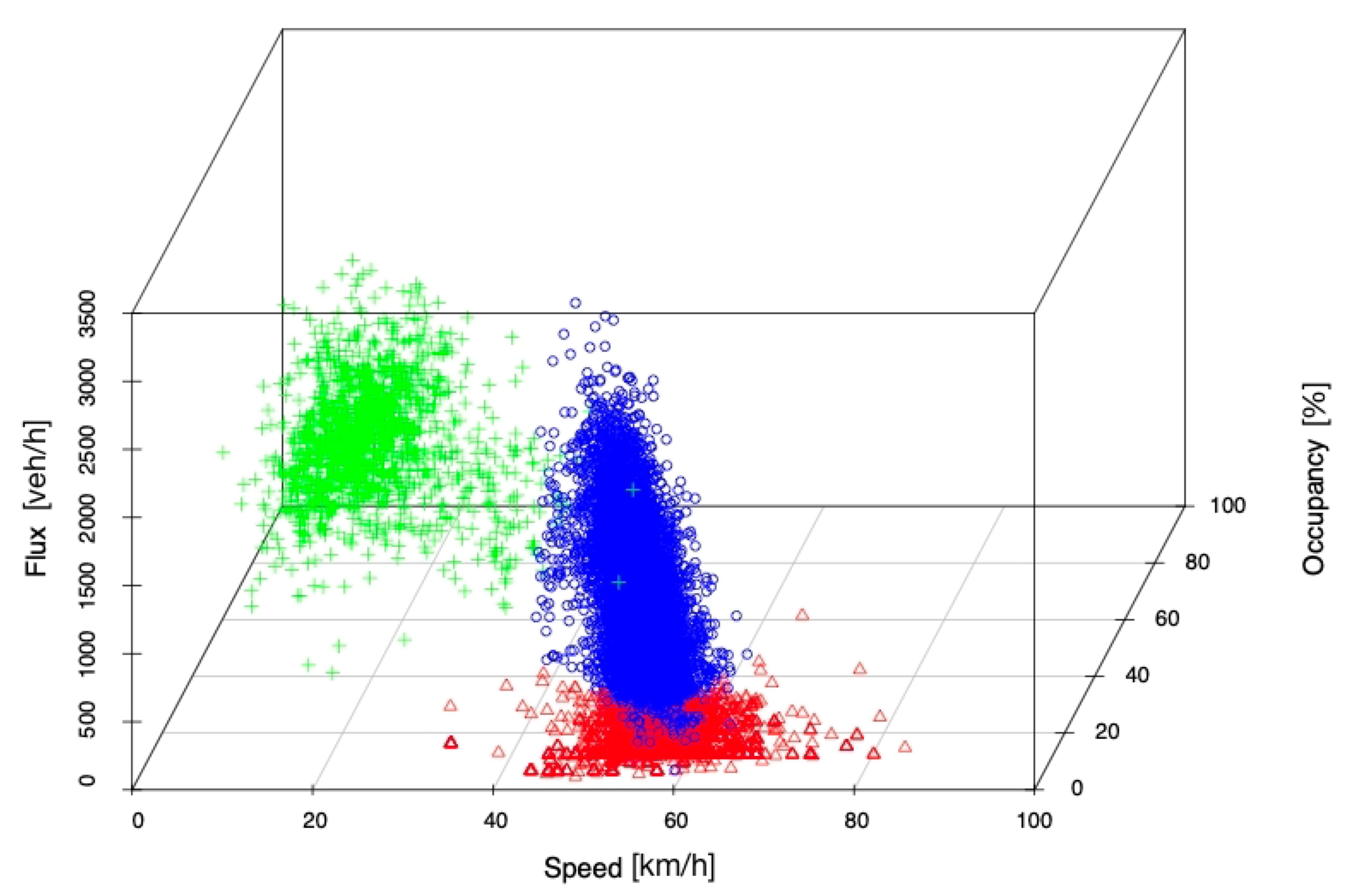
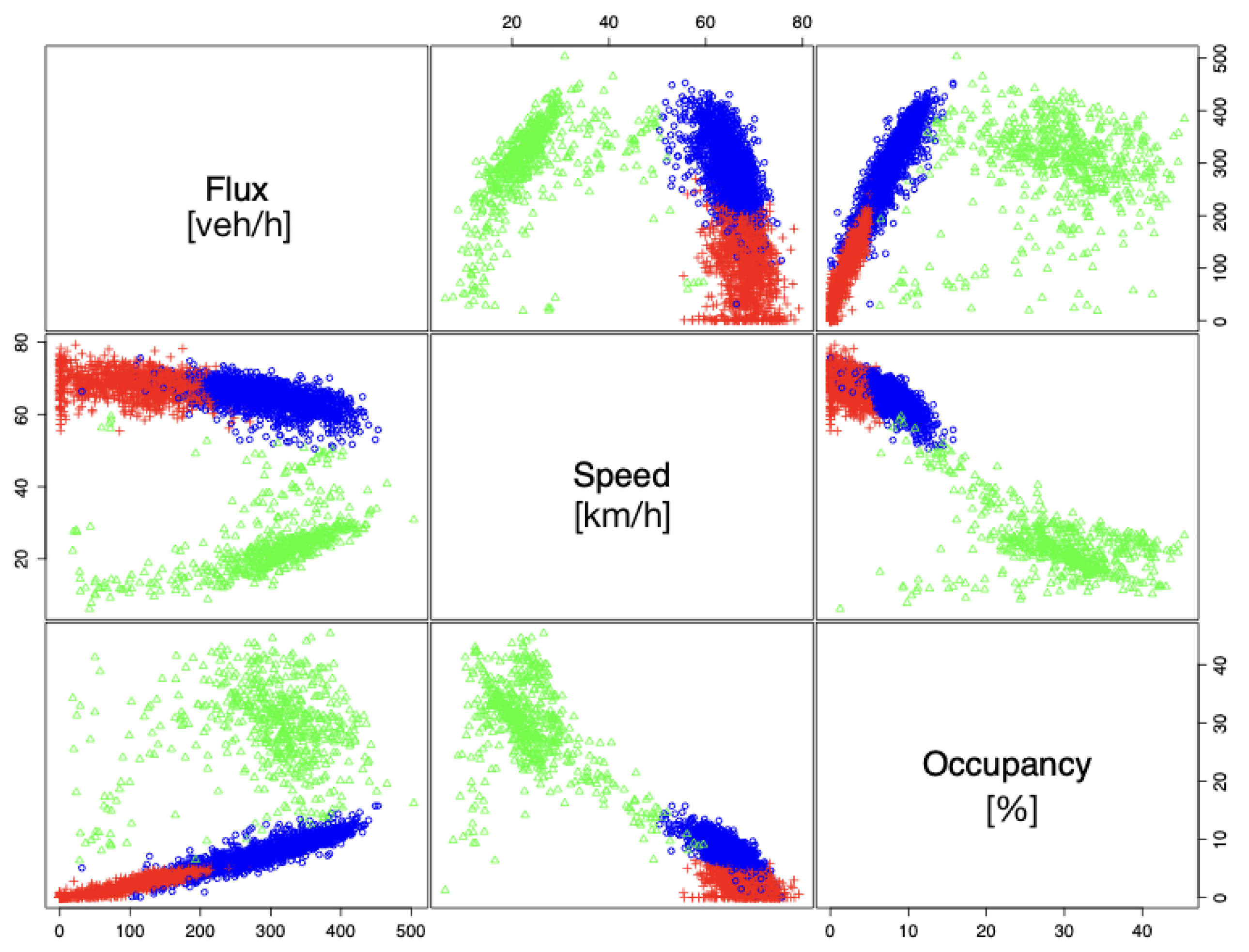
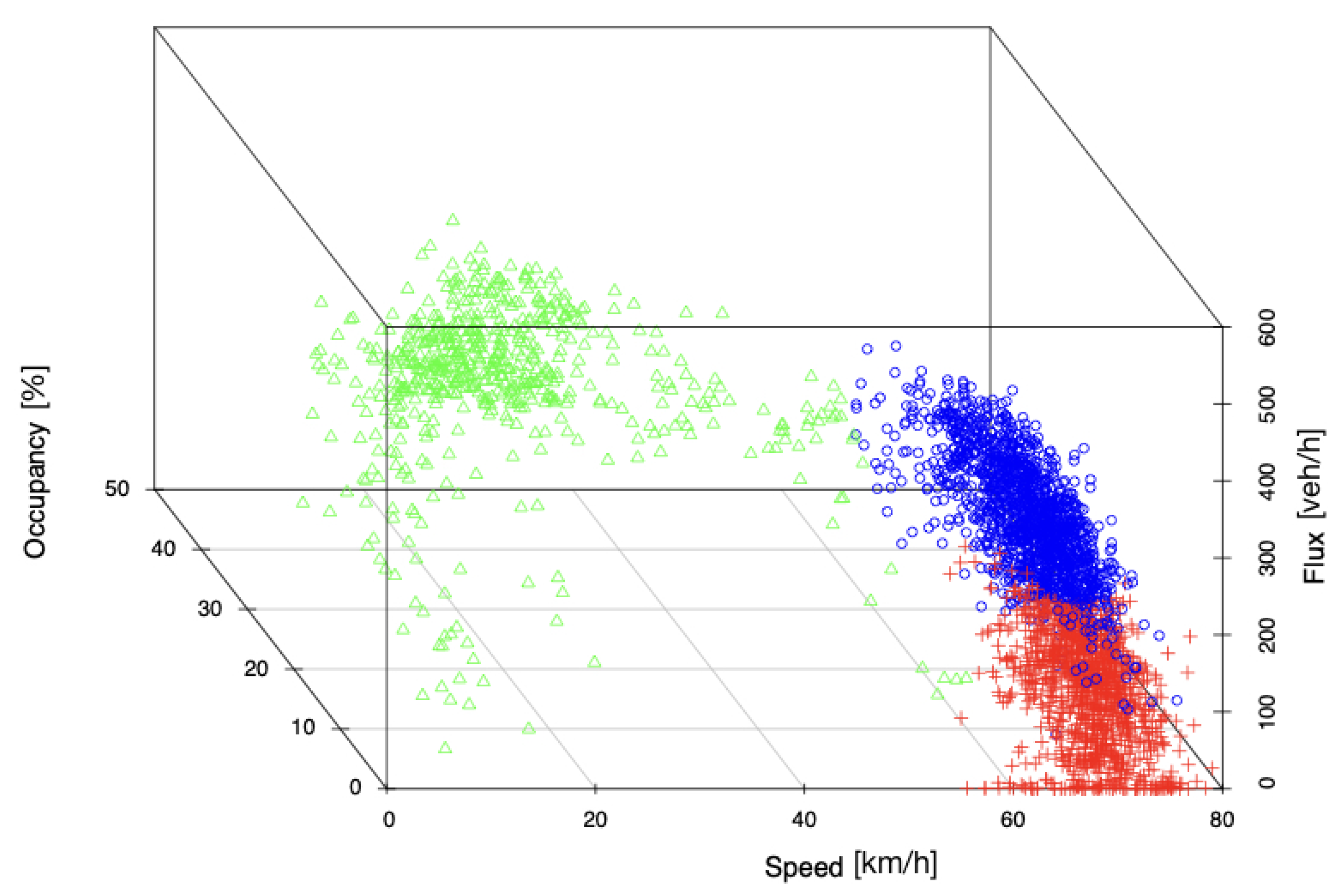
- Unlike most studies that focus on traffic data from a single source, we use data from multiple geographic locations in Europe and the US and analyze the fundamental relationships among flow, density and speed in the 3D space instead of the commonly adopted two-variable representation of the FD. In addition, we use a set of statistical tools including model-based clustering, hypothesis testing and regression to analyze the traffic data.
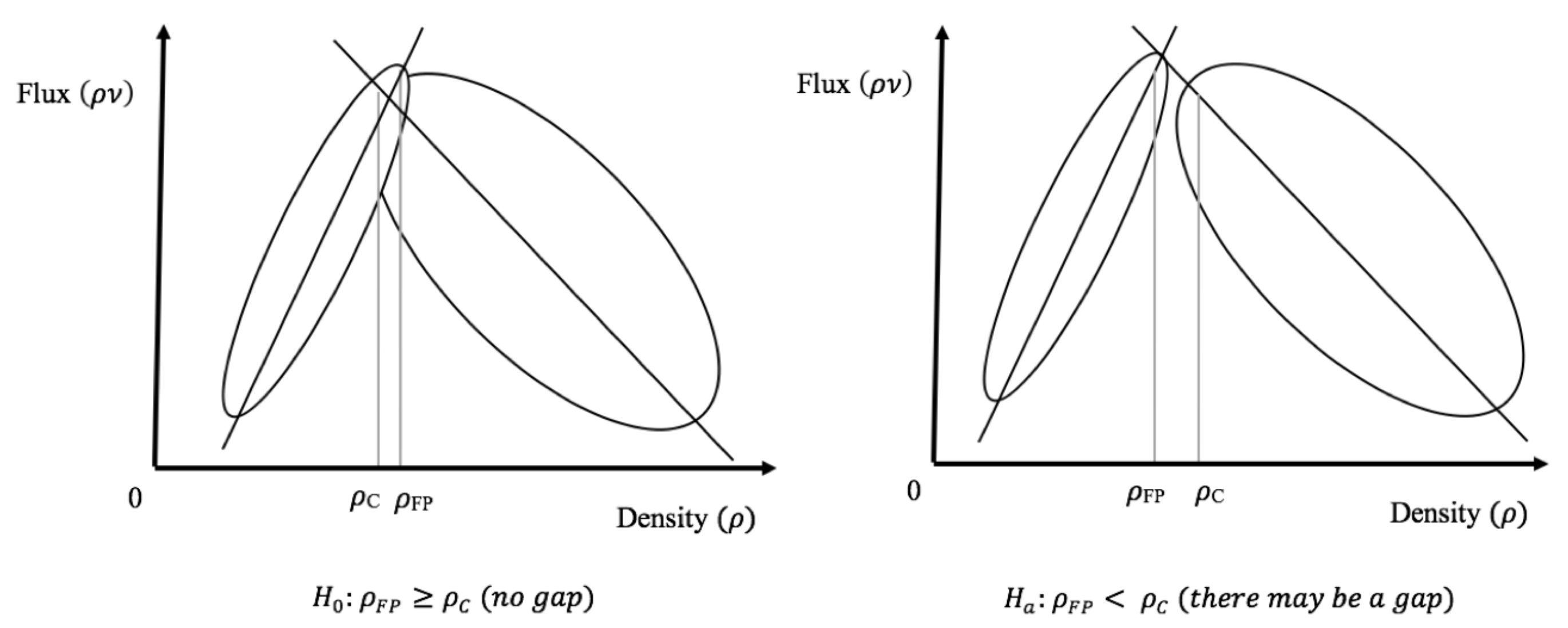
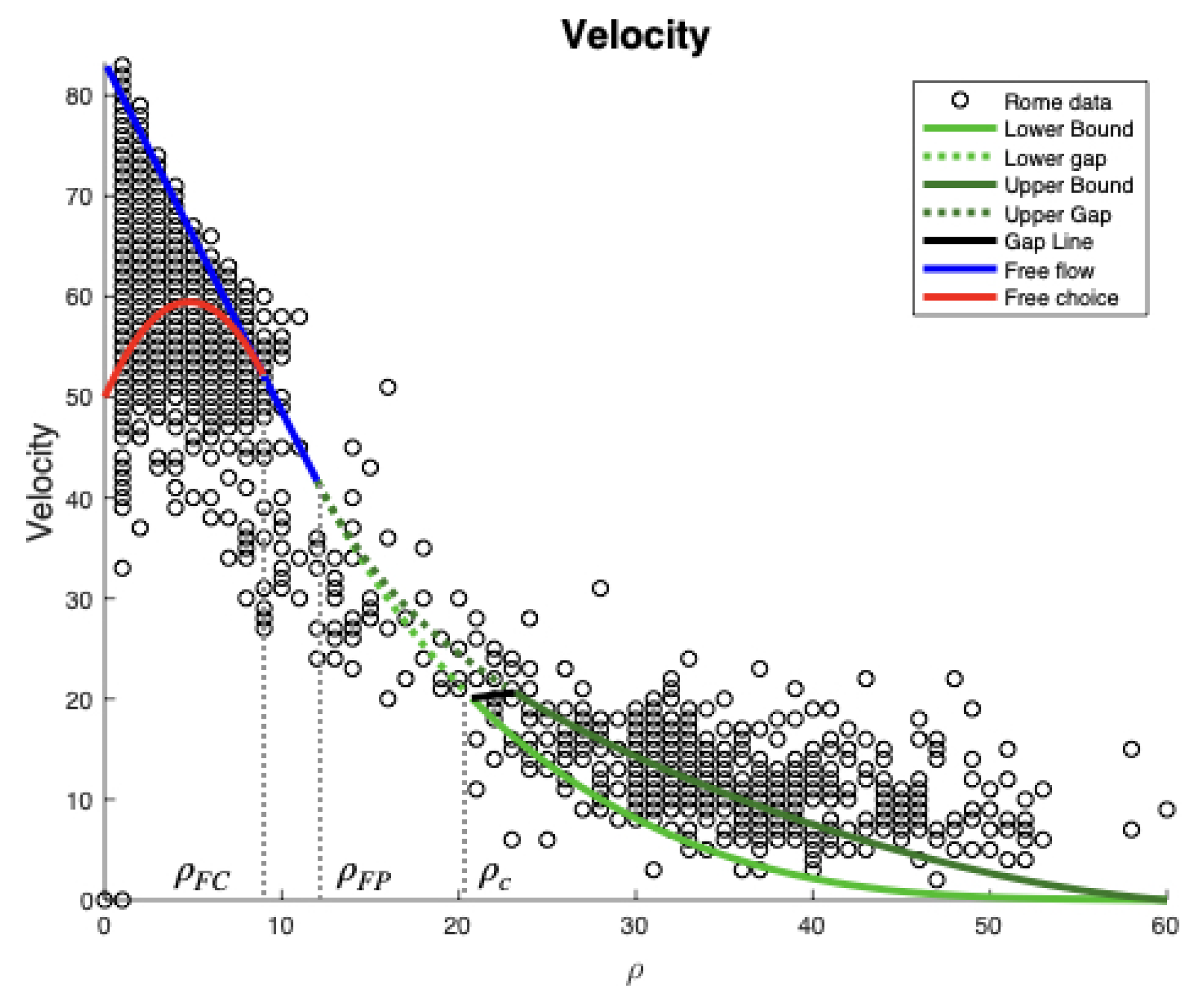
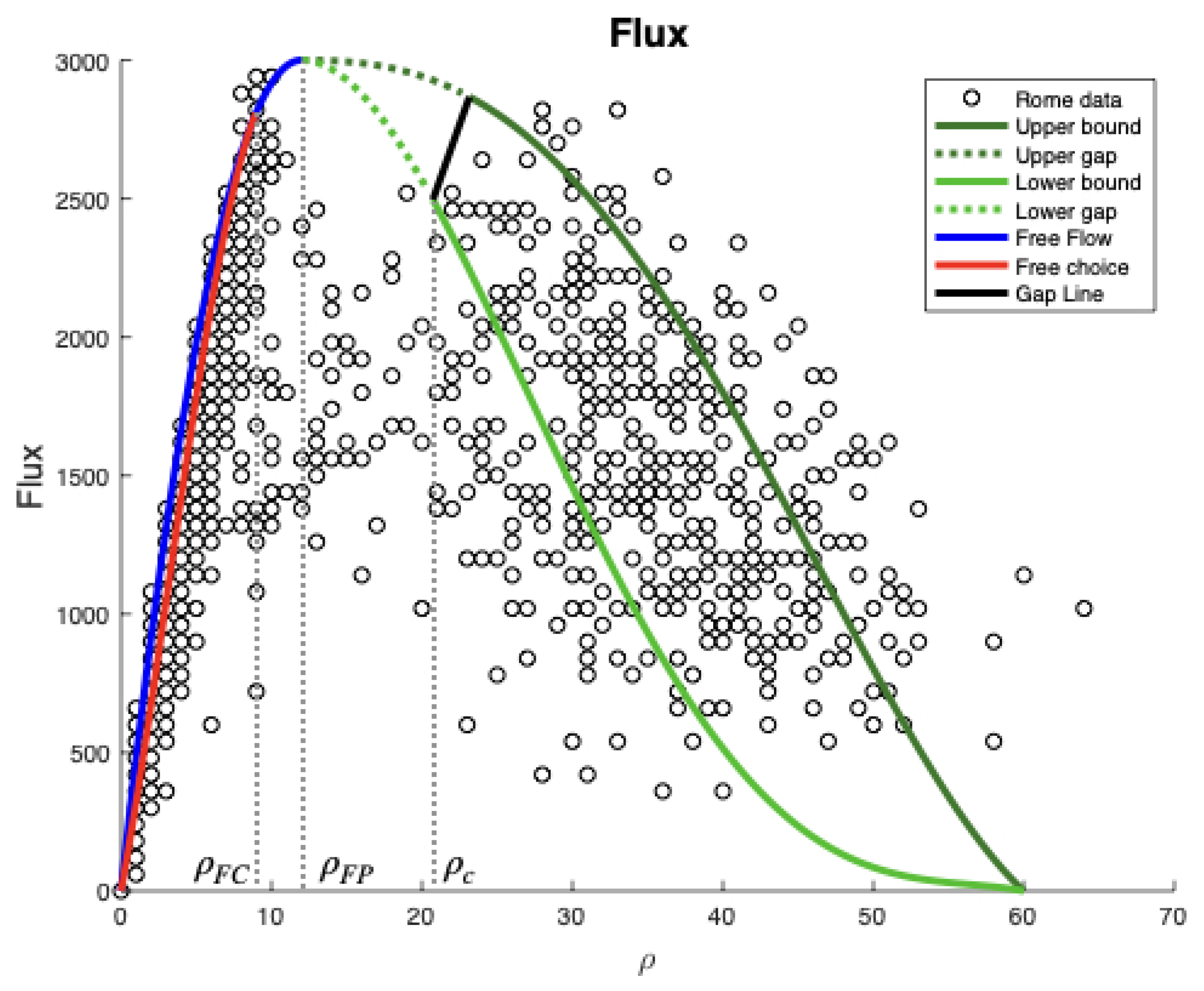
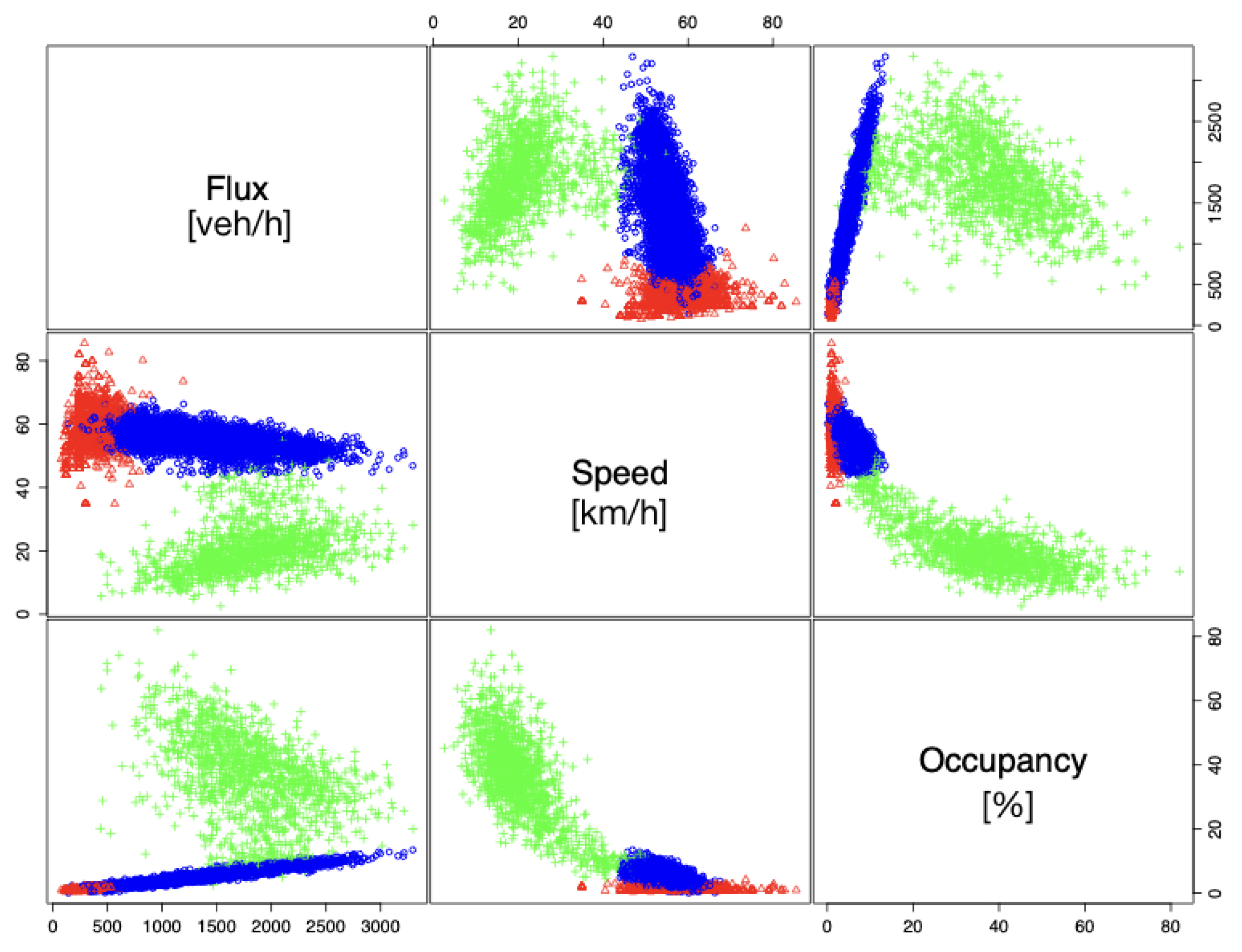
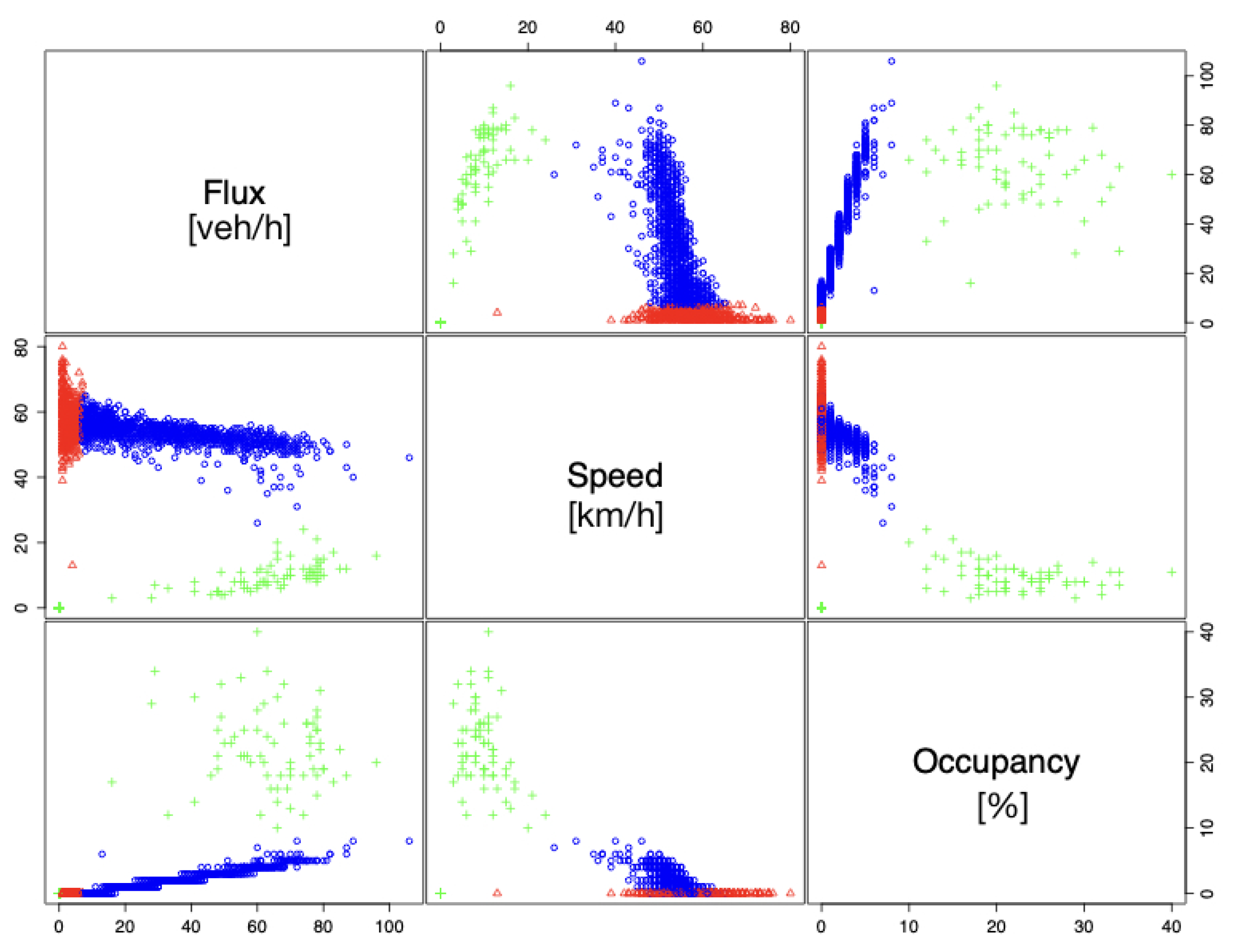
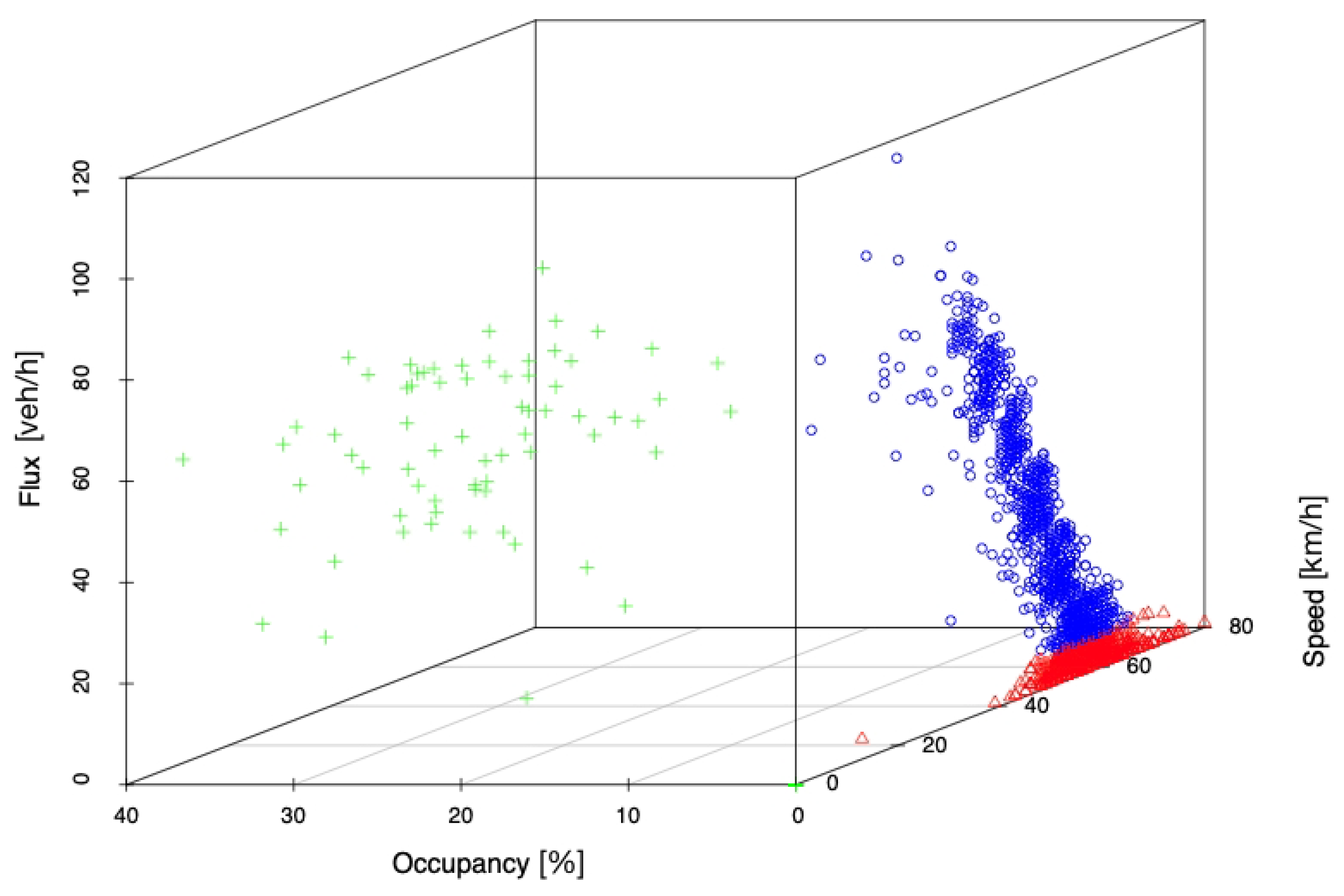
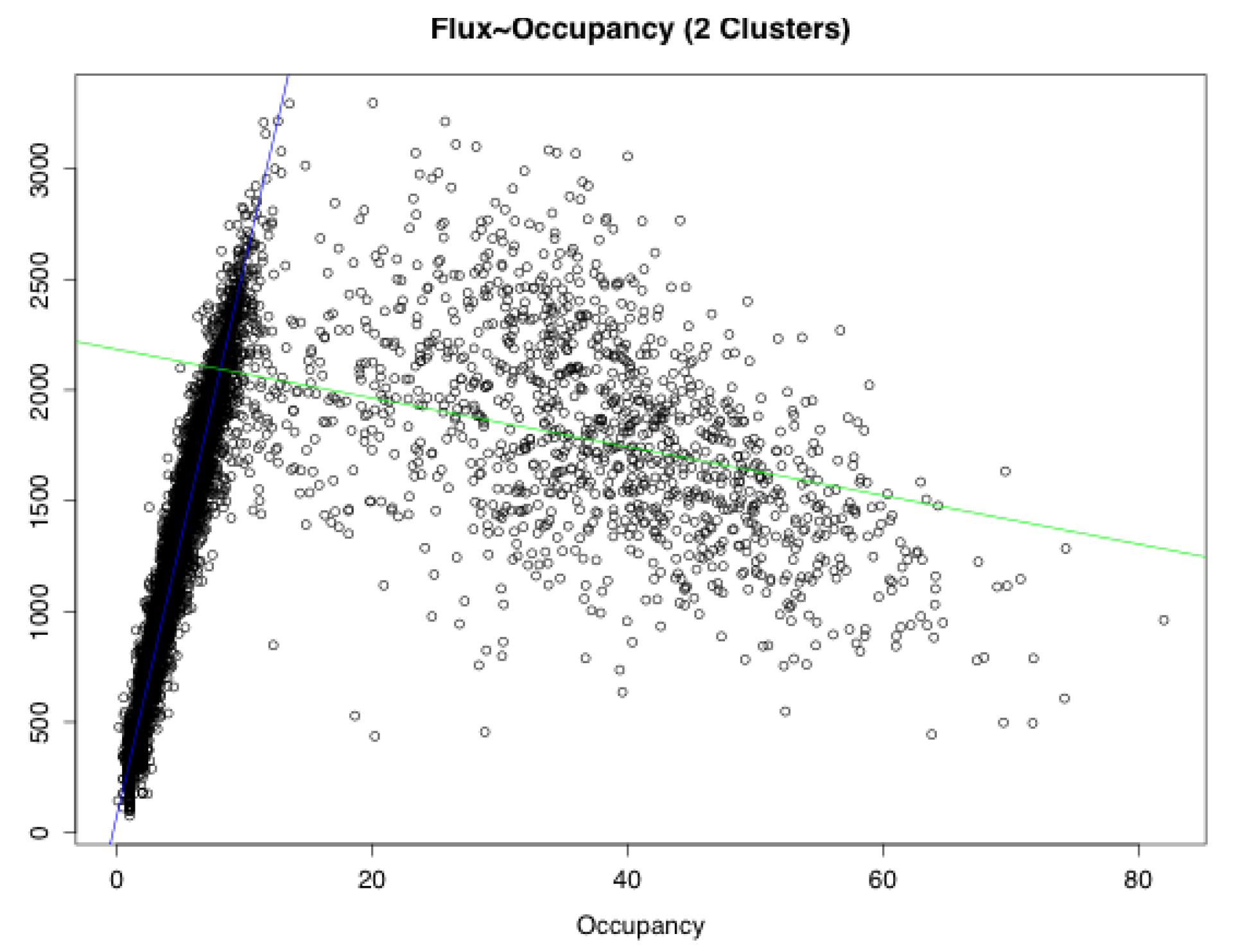
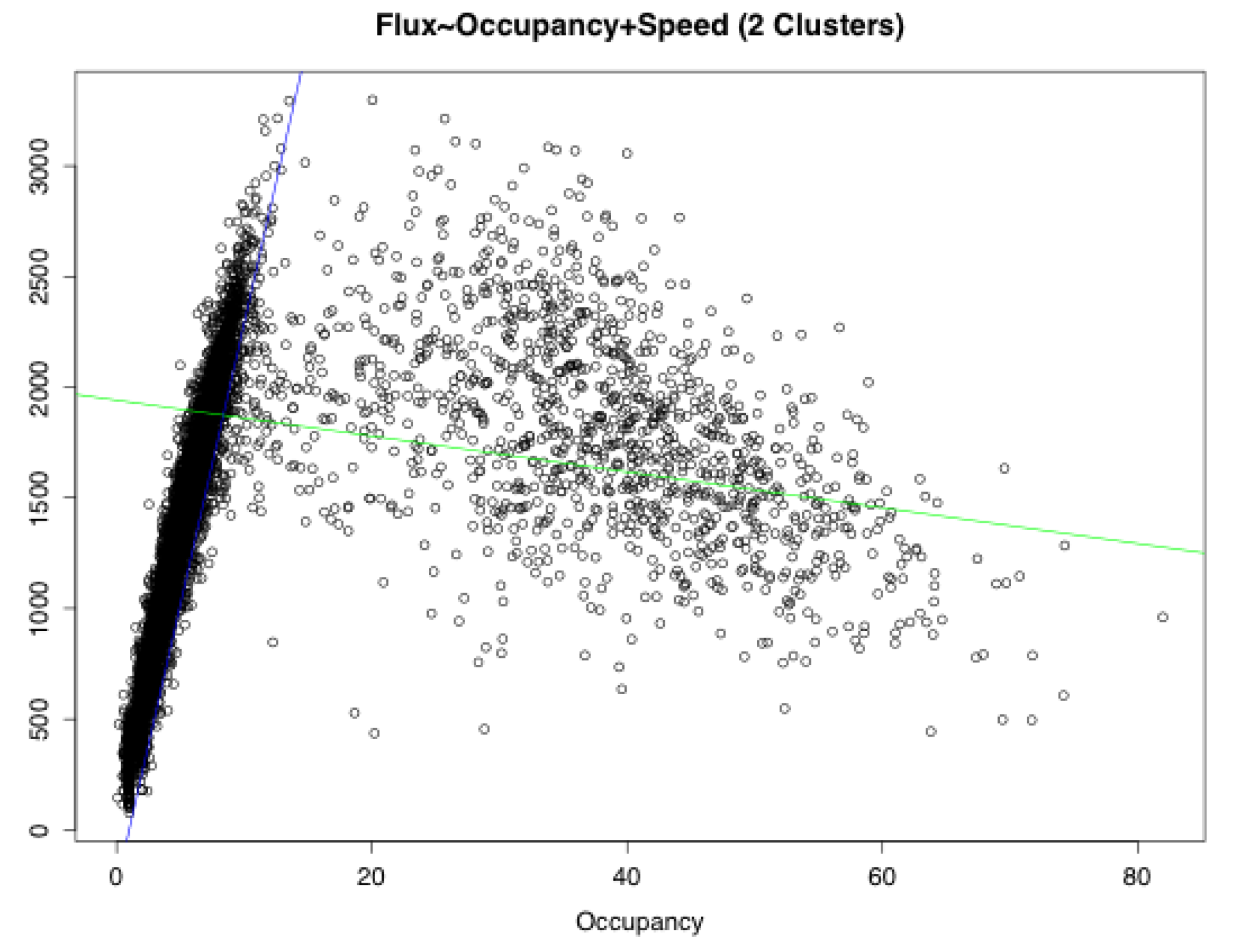
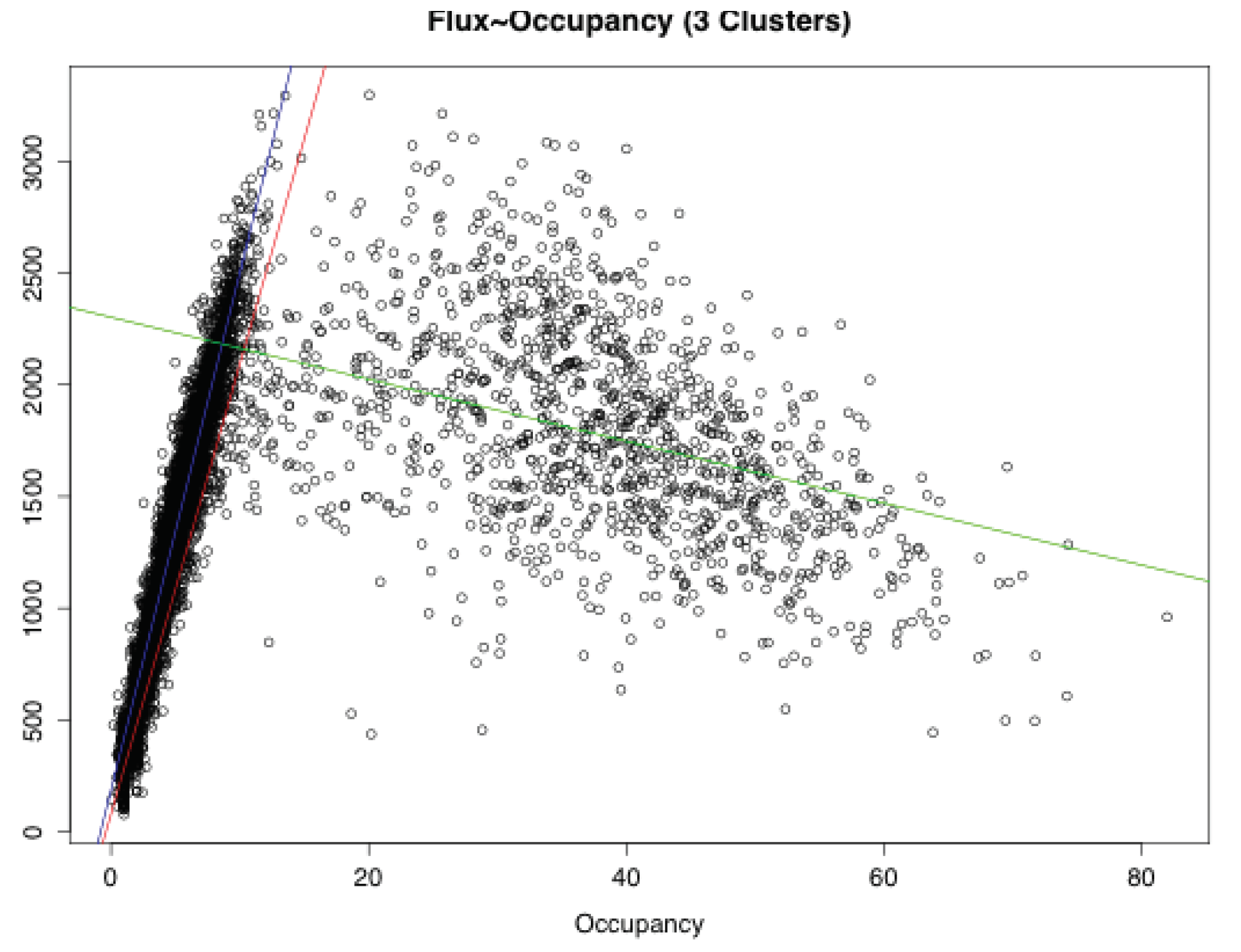
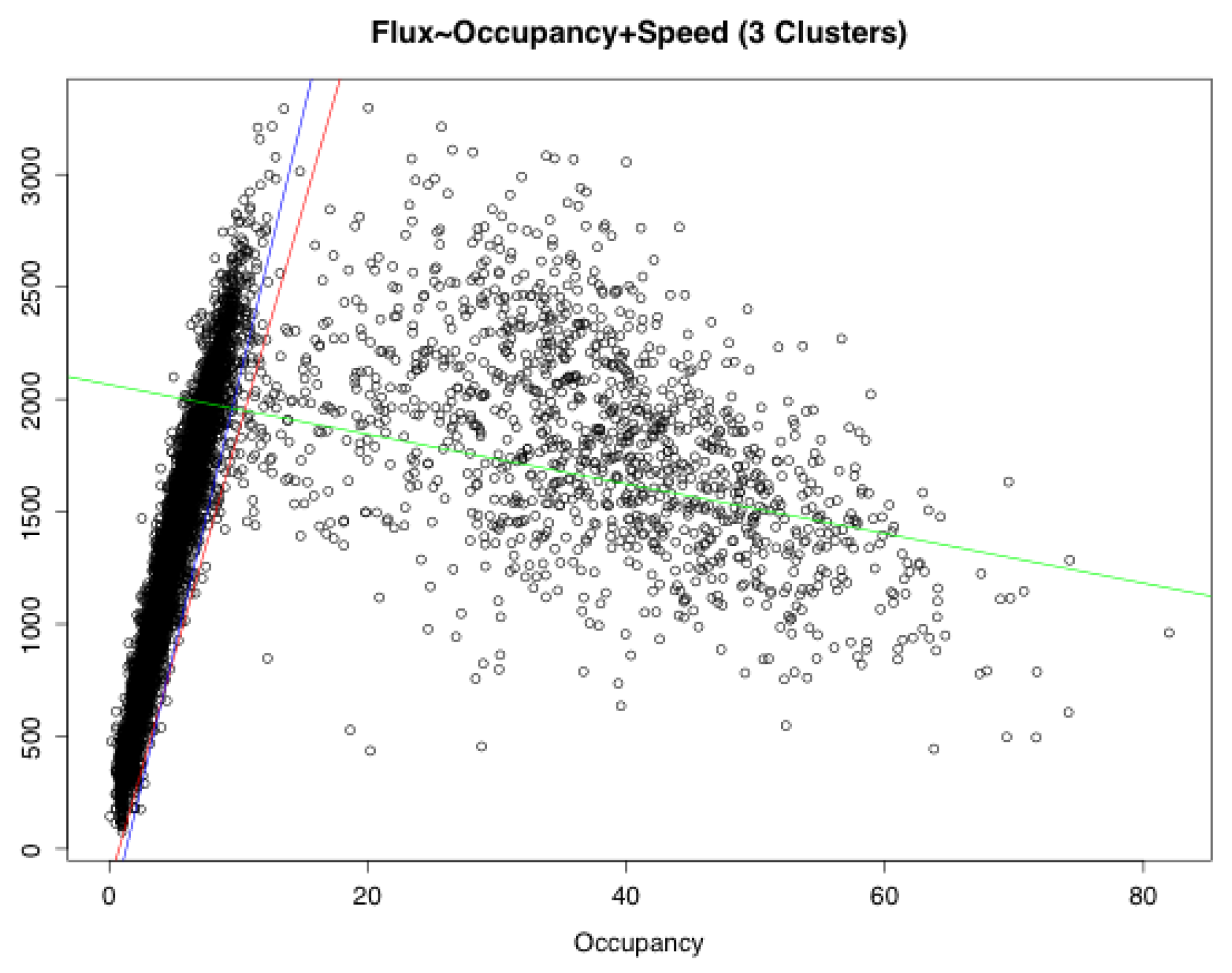
- Following the above exercise, we discover three data clusters representing three traffic regimes, two of which are contained in the free-flow phase and the third corresponds to the congested phase. Moreover, we are able to detect a statistically significant gap between the first two regimes and the third one. These findings are validated using multiple data sources, and the main features (regimes and gaps) are consistent across different geographical areas.
- Building on the first two, we propose a new three-phase macroscopic traffic flow model, which exhibits all the characteristics shown by our data analyses and combines the features of the ARZ, CGARZ and phase transition models. A complete characterization of solutions of the Riemann problems is provided.
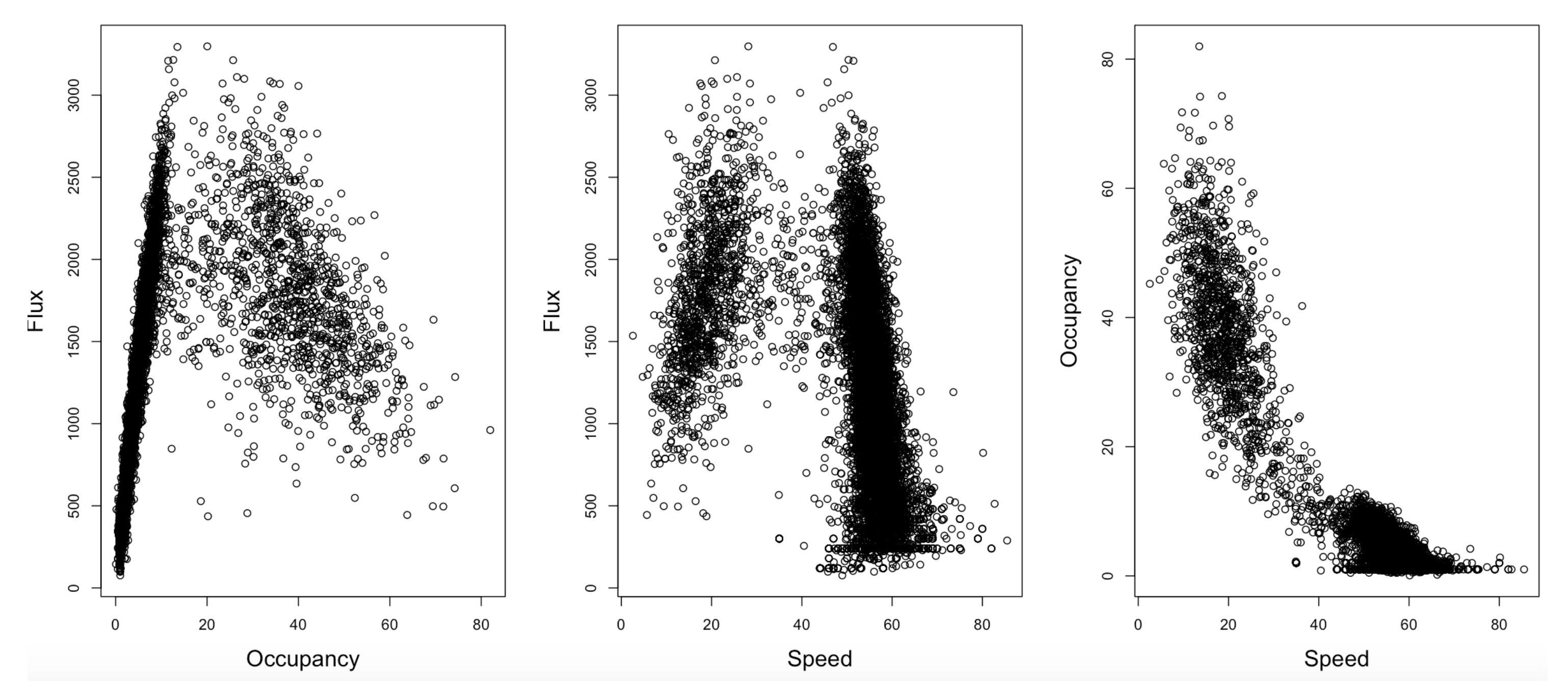
2. Data Analysis
2.1. Experimental Data
- Flux (denoted as f), also known as flow or volume, is the number of vehicles passing through a fixed location per unit of time.
- Velocity (denoted as v) is the average speed of vehicles per unit of time.
- Occupancy (denoted as o) is the percentage of time that a vehicle covers the sensor over the unit time of data collection.
2.2. Statistical Tools
2.2.1. Cluster Analysis
2.2.2. Three Phase Traffic
2.2.3. Gap Analysis
3. A Macroscopic Second-Order Model Accounting for the 3 Phases
- Non-negative: for all , ;
- Continuous: and for all
- Vanishing at maximal density: for all
- Non-decreasing with respect to w: for
3.1. Riemann Solver
- 1-rarefaction waves. Two points and are connected by a 1-rarefaction wave if and only if
- 1-shock waves. Two points and are connected by a 1-shock wave if and only ifIn this case, the jump discontinuity moves with speed
- 2-contact discontinuity. Two points and are connected by a 2-contact wave if and only if
- If and belongs both to or , the Riemann solver is defined as above.
- If and , the intermediate point belongs to . Let the point defined byThe solution is composed by 1-waves connecting and , a phase-transition jump between and moving with speedfollowed by 1-waves connecting and and eventually a 2-contact from to .
- If and , the intermediate point belongs to . Therefore, the solution always contains a 1-wave (shock phase-transition) from to , followed by a 2-contact discontinuity. Notice that the solution may also contain an intermediate 1-wave in the congested phase.
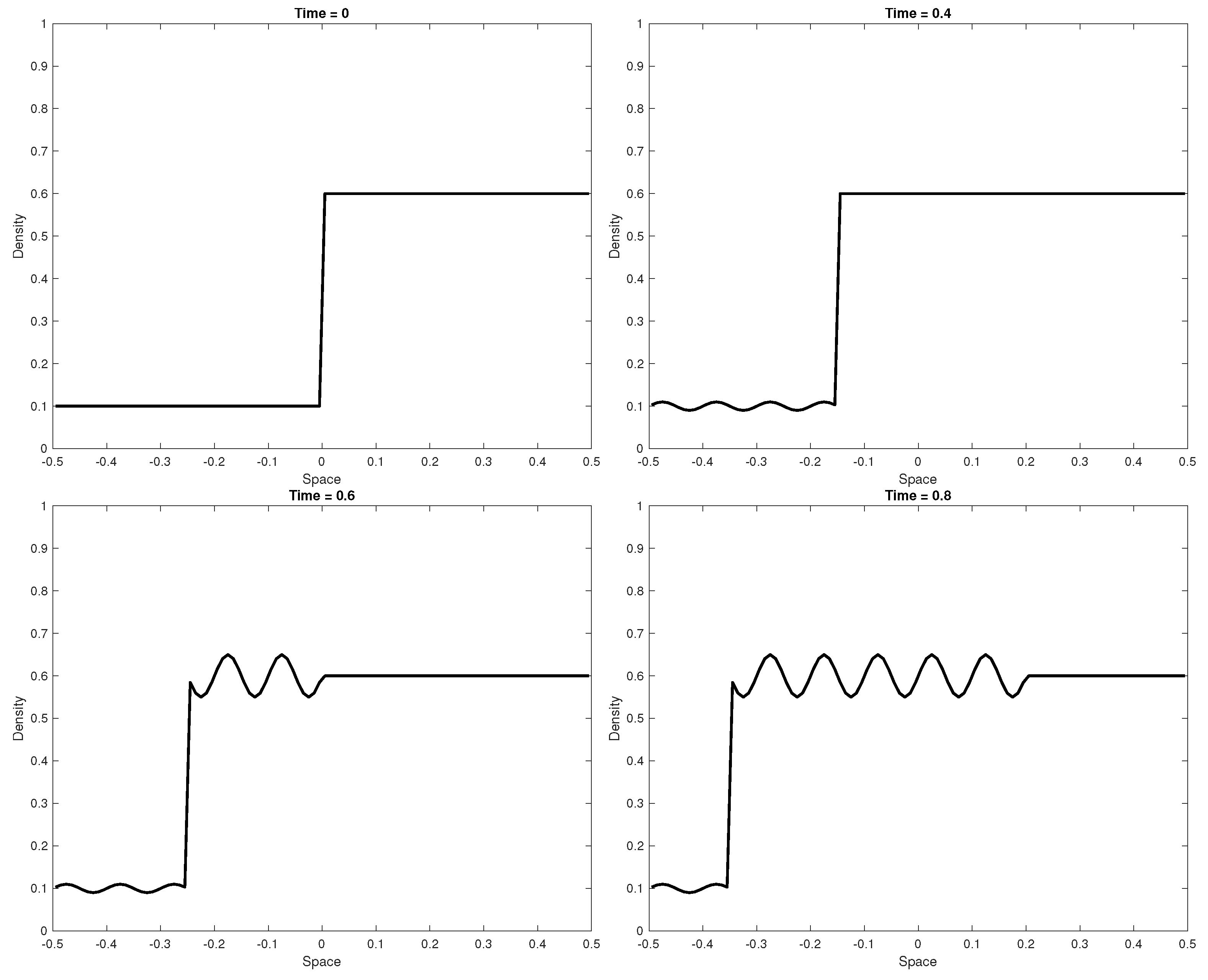
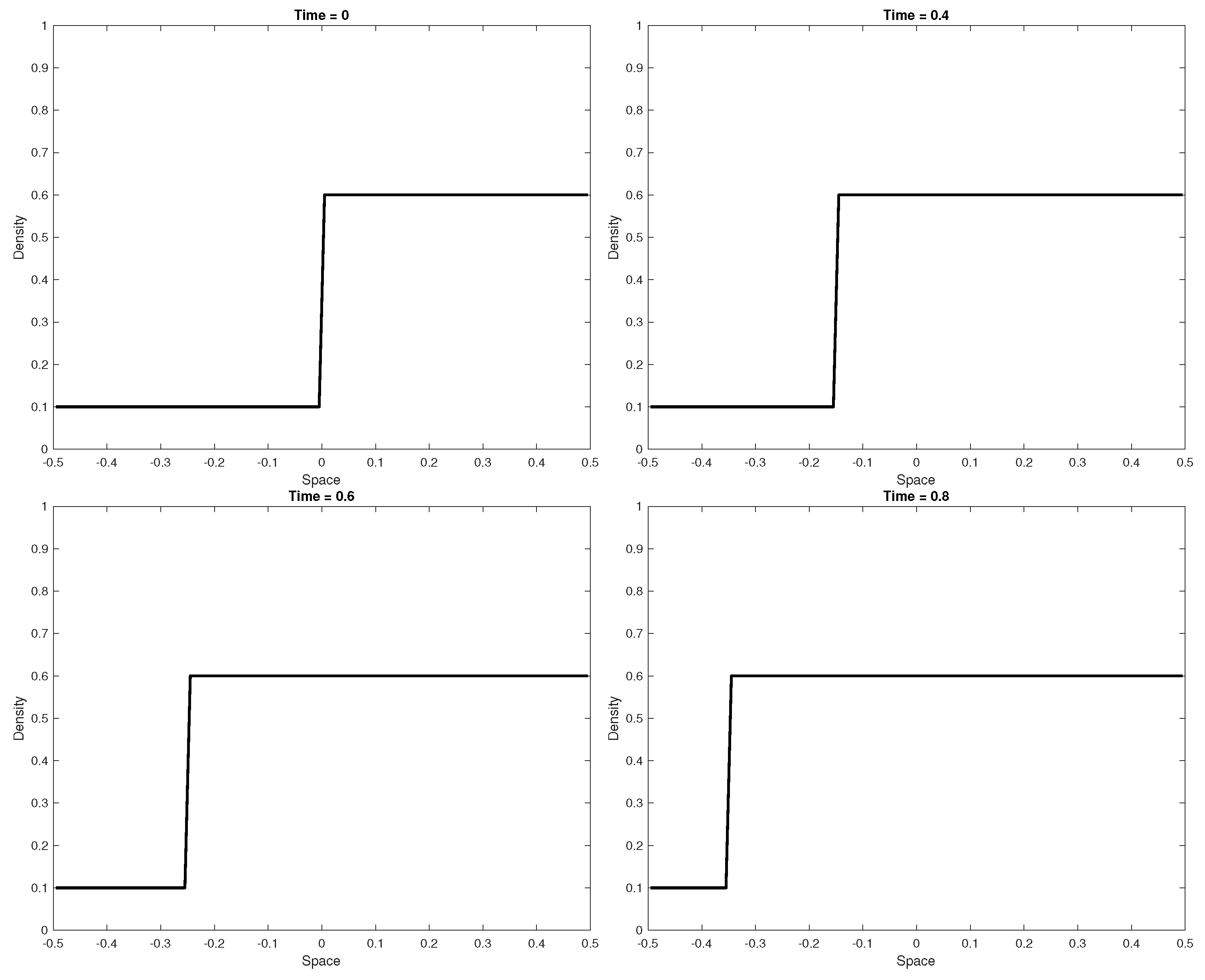
4. Numerical Scheme and Simulations
4.1. Numerical Scheme
- Step 1: Evolution in time.This step consists in solving the Riemann problem at each cell interface with initial data , obtaining an exact solution .
- Step 2: Projection to timeOnce all Riemann problems at interfaces are solved, Chalons and Goatin [25] proposed a new averaging procedure. The idea is that, since the solution can contain states in different phases, the average is not done on the regular mesh cells but on modified non-uniform cells that contain only values belonging to the same phase. We denote this modified cells by . Afterwards, a sampling strategy allows us to recover a piecewise constant solution on the initial mesh cells .
4.2. Numerical Simulations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Data Description
- Rome: Three sensors over one week (June 2006) aggregated every 1 min
- Las Vegas: Fifty sensors over five years (2010–2015) aggregated over every 10 min
- Sophia Antipolis: Four sensors for eight months (January–August 2014) every 6 min

Appendix B. Results of Cluster Analysis

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Percentile (%) | Phase | Density | Test Statistic | p-Value |
|---|---|---|---|---|---|
| Rome | 97.5 | FP | 10 | 0 | 1 |
| 2.50 | C | 10 | |||
| 97 | FP | 9 | −1.79 | 0.037 | |
| 3 | C | 10 | |||
| 95 | FP | 9 | −3.15 | <0.001 | |
| 5 | C | 11 | |||
| Las Vegas | 97.5 | FP | 12 | −0.91 | |
| 2.50 | C | 13 | |||
| 97 | FP | 12 | −2.17 | 0.015 | |
| 3 | C | 14 | |||
| 95 | FP | 11 | −5.75 | <0.001 | |
| 5 | C | 16 | |||
| Sophia | 97.5 | FP | 5 | −2.82 | 0.002 |
| 2.50 | C | 10 | |||
| 97 | FP | 5 | −6.44 | <0.001 | |
| 3 | C | 12 | |||
| 95 | FP | 4 | −5.79 | <0.001 | |
| 5 | C | 12 |





Appendix Quantifying the Improved Goodness of Fit Through RSS Comparisons
| Adj. | RSS | ||||
|---|---|---|---|---|---|
| Free Phase | 77.71 | 249.18 | 0.952 | 0.952 | 157,765,974 |
| Congestion | 2184.09 | −11.00 | 0.09746 | 0.09676 | 283,255,197 |

| Adj. | RSS | |||||
|---|---|---|---|---|---|---|
| Free Phase | −248.7 | 253.88 | 5.48 | 0.953 | 0.953 | 154,308,365 |
| Congestion | 1941.54 | −8.11 | 6.64 | 0.1032 | 0.1018 | 281,448,225 |

| Adj. | RSS | ||||
|---|---|---|---|---|---|
| Free Choice | 79.56 | 201.3 | 0.563 | 0.5628 | 14,269,933 |
| Free Flow | 187.68 | 231.36 | 0.9175 | 0.9175 | 126,714,084 |
| Congestion | 2302.55 | −13.87 | 0.1618 | 0.1611 | 240,324,480 |

| Adj. | RSS | |||||
|---|---|---|---|---|---|---|
| Free Choice | −153.88 | 200.36 | 4.03 | 0.6033 | 0.603 | 12,951,197 |
| Free Flow | −316.91 | 239.01 | 8.43 | 0.9193 | 0.9192 | 123,984,911 |
| Congestion | 2065.61 | −11.05 | 6.5 | 0.1676 | 0.1663 | 283,641,319 |

| % RSS Improvement | ||
|---|---|---|
| 2 Clusters | 3 Clusters | |
| 2D | FP: | FC: |
| FF: | ||
| C: | C: | |
| 3D | FP: | FC: - |
| FF: - | ||
| C: | C: - | |
References
- Lighthill, M.J.; Whitham, G.B. On kinematic waves. II. A theory of traffic flow on long crowded roads. Proc. R. Soc. A 1955, 229, 317–346. [Google Scholar]
- Richards, P.I. Shock waves on the highway. Oper. Res. 1956, 4, 42–51. [Google Scholar] [CrossRef]
- Aw, A.; Rascle, M. Resurrection of “second order” models of traffic flow. SIAM J. Appl. Math. 2000, 60, 916–938. [Google Scholar] [CrossRef]
- Zhang, H.M. A non-equilibrium traffic model devoid of gas-like behavior. Transp. Res. Part B Methodol. 2002, 36, 275–290. [Google Scholar] [CrossRef]
- Garavello, M.; Han, K.; Piccoli, B. Models for Vehicular Traffic on Networs; Series on Applied Mathematics; American Institute of Mathematical Sciences: Springfield, MO, USA, 2016; Volume 9. [Google Scholar]
- Colombo, R.M. Hyperbolic phase transitions in traffic flow. SIAM J. Appl. Math. 2003, 63, 708–721. [Google Scholar] [CrossRef]
- Colombo, R.M.; Marcellini, F.; Rascle, M. A 2-phase traffic model based on a speed bound. SIAM J. Appl. Math. 2010, 70, 2652–2666. [Google Scholar] [CrossRef][Green Version]
- Colombo, R.M.; Goatin, P.; Piccoli, B. Road networks with phase transitions. J. Hyperbolic Differ. Eq. 2010, 7, 85–106. [Google Scholar] [CrossRef]
- Goatin, P. The Aw–Rascle vehicular traffic flow model with phase transitions. Math. Comput. Model. 2006, 44, 287–303. [Google Scholar] [CrossRef]
- Coclite, G.; Garavello, M.; Piccoli, B. Traffic flow on a road network. SIAM J. Math. Anal. 2005, 36, 1862–1886. [Google Scholar] [CrossRef]
- Gerlough, D.L.; Huber, M.J. Traffic Flow Theory; No. HS-006 783; Transportation Research Board: Washington, DC, USA, 1976. [Google Scholar]
- Kerner, B.S. Three-phase traffic theory and highway capacity. Phys. A 2004, 333, 379–440. [Google Scholar] [CrossRef]
- Lebacque, J.P.; Khoshyaran, M.M. A variational formulation for higher order macroscopic traffic flow models of the GSOM family. Transp. Res. Part Methodol. 2013, 57, 245–265. [Google Scholar] [CrossRef]
- Fan, S.; Sun, Y.; Piccoli, B.; Seibold, B.; Work, D.B. A Collapsed Generalized Aw-Rascle-Zhang Model and Its Model Accuracy. arXiv 2017, arXiv:physics.soc-ph/1702.03624. [Google Scholar]
- ATAC, S.p.A. Available online: http://www.atac.roma.it/ (accessed on 3 April 2017).
- Regional Transportation Commission of Southern Nevada (RTC), Freeway and Arterial System of Transportation (FAST) Division. Available online: http://bugatti.nvfast.org/ (accessed on 3 April 2017).
- Département des Alpes Maritimes. Available online: https://www.departement06.fr (accessed on 3 April 2017).
- Fraley, C.; Raftery, A.E. Model-based clustering, discriminant analysis, and density estimation. J. Am. Stat. Assoc. 2002, 97, 611–631. [Google Scholar] [CrossRef]
- Gross, A.J.; Clark, V. Survival Distributions: Reliability Applications in the Biomedical Sciences; John Wiley & Sons: Hoboken, NJ, USA, 1975. [Google Scholar]
- Fan, S.; Work, D.B. A heterogeneous multiclass traffic flow model with creeping. SIAM J. Appl. Math. 2015, 75, 813–835. [Google Scholar] [CrossRef]
- Fan, S.; Herty, M.; Seibold, B. Comparative model accuracy of a data-fitted generalized Aw-Rascle-Zhang model. Netw. Heterog. Media 2014, 9, 239–268. [Google Scholar] [CrossRef]
- Zhang, P.; Wong, S.; Dai, S. A conserved higher-order anisotropic traffic flow model: Description of equilibrium and non-equilibrium flows. Transp. Res. Part B Methodol. 2009, 43, 562–574. [Google Scholar] [CrossRef]
- Blandin, S.; Work, D.; Goatin, P.; Piccoli, B.; Bayen, A. A general phase transition model for vehicular traffic. SIAM J. Appl. Math. 2011, 71, 107–127. [Google Scholar] [CrossRef]
- Bianchini, S. The semigroup generated by a Temple class system with non-convex flux function. Differ. Integral Eq. 2000, 13, 1529–1550. [Google Scholar]
- Chalons, C.; Goatin, P. Godunov scheme and sampling technique for computing phase transitions in traffic flow modeling. Interfaces Free Boundaries 2008, 10, 197–221. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Delle Monache, M.L.; Chi, K.; Chen, Y.; Goatin, P.; Han, K.; Qiu, J.-m.; Piccoli, B. A Three-Phase Fundamental Diagram from Three-Dimensional Traffic Data. Axioms 2021, 10, 17. https://doi.org/10.3390/axioms10010017
Delle Monache ML, Chi K, Chen Y, Goatin P, Han K, Qiu J-m, Piccoli B. A Three-Phase Fundamental Diagram from Three-Dimensional Traffic Data. Axioms. 2021; 10(1):17. https://doi.org/10.3390/axioms10010017
Chicago/Turabian StyleDelle Monache, Maria Laura, Karen Chi, Yong Chen, Paola Goatin, Ke Han, Jing-mei Qiu, and Benedetto Piccoli. 2021. "A Three-Phase Fundamental Diagram from Three-Dimensional Traffic Data" Axioms 10, no. 1: 17. https://doi.org/10.3390/axioms10010017
APA StyleDelle Monache, M. L., Chi, K., Chen, Y., Goatin, P., Han, K., Qiu, J.-m., & Piccoli, B. (2021). A Three-Phase Fundamental Diagram from Three-Dimensional Traffic Data. Axioms, 10(1), 17. https://doi.org/10.3390/axioms10010017