1. Introduction
Volterra integral equations (VIEs) of the type
and their discrete version,
are significative mathematical models for representing real-life problems involving feedback and control [
1,
2]. The analysis of their dynamics allows one to describe the phenomena they represent. In [
3], the two equations were analysed in the unifying notation of time scales, and some results were obtained under linear perturbation of the kernel. Here, we revise this approach to obtain results on classes of linear discrete equations whose kernel can be split into a well-behaving part (the unperturbed kernel) plus a term that acts as a perturbation. The implications for numerical methods are, in general, not straightforward and pass through some restrictions on the step length. Nevertheless, here, we overcome this problem and obtain some results on the stability of numerical methods for VIEs.
For Equations (
1) and (
2), we assume that
and
is a
matrix.
The paper is organised as follows. In
Section 2, we introduce the split kernel for Equation (
2) and, using a new formulation of Theorem 2 in [
3], we provide sufficient conditions for the above-mentioned splitting that imply that the solution vanishes. In
Section 3, we propose a reformulation of the
methods for (
1) as discrete Volterra equations and exploit the theory developed in the previous section in order to investigate its numerical stability properties. In
Section 4, some applications are described and analysed through the tools developed in
Section 2 and
Section 3, for which we obtain new and more general results on the asymptotic behaviour for the numerical solutions of both linear and nonlinear equations. In
Section 5, some numerical examples are reported.
3. Background Material on Methods
The analysis carried out in the previous section can be effectively applied to
methods for the systems of VIEs:
Here, we consider the numerical solution to (
5) obtained by the
methods with Gregory convolution weights (see, for example, [
5,
6,
7]):
where
with
for
is the step size and
are the weights. We assume that the weights are non-negative and that
are given starting values.
The weights
are called the starting weights and satisfy (see [
5]):
Moreover, we want to underline some properties of the Gregory convolution weights,
(see, for example [
5,
7]), which will be useful in the subsequent sections:
From now on, we assume that
h satisfies
where
I is the identity matrix of size
d.
Choose
and let
and
The
method (
6) can be written, for
as follows:
with
This alternative formulation of the method in terms of matrices
P and
Q allows us to analyse its asymptotic properties using the theory developed in the previous paragraph for Equation (
4). So, (
11) corresponds to the discrete Equation (
4) with
M and
N equal to
and
, respectively, and
for
4. Dynamic Behaviour of Numerical Approximations and Applications
In [
8], we carried out an analysis of Volterra equations on time scales that allowed us to obtain results on the asymptotic behaviour of the analytical solution of (
5) and on its discrete counterpart in
under the assumptions:
and
respectively, where
and
If
is non-increasing with respect to
the bound (
13) is certainly implied by (
12) for those values of the parameter
h such that
This relation, which allows one to establish a connection between the behaviour of the analytical solution of (
5) and of its discrete counterpart in
does not straightforwardly apply to numerical methods due to the presence of the weights
and
of the
methods. This is because the weights can cause the loss of monotonicity, and they may also be greater than 1; then, (
13) is not satisfied. In [
8], it was proved that if (
12),
and
are satisfied, the analytical solution
of Equation (
5) vanishes at infinity as
Moreover, in [
9], it was shown that, if
then there exists a positive constant
A such that
The bound (
14) assures that, when (
12) is satisfied, the numerical solution
tends to zero for
if the step size
h is small enough, consistently with the behaviour of
.
Theorem 2 in
Section 2 allows us to remove the restriction on
h given by (
14). In order to show this result, which states, in fact, the unconditional stability of the
methods, we need the following preparatory lemma.
Lemma 1. Assume that:
- (i)
for any fixed ,
- (ii)
there exists such that for
- (iii)
there exists such that
Then, for any such that where is such that
Proof. Let
be a fixed value of the step size. Assumption (ii) implies that
for any
Moreover,
because of (i); thus, for any
we choose
such that
Now, we choose such that and such that Since, for is a non-increasing function in s for each we have □
Theorem 3. Assume that all the hypotheses of Lemma 1 hold for the kernel k of Equation (5); then, for the numerical approximation to its solution obtained by the method (6), if one has Proof. For a fixed
Lemma 1 provides a value
for which
with
positive constant. Referring to the reformulation (
11) of the method, all the assumptions of Theorem 2 are satisfied. Thus, because of property (
7) on the asymptotic behaviour of starting weights and of assumption
of Lemma 1,
tends to zero for
So, in view of Theorem 2,
also vanishes. □
Other applications of Theorem 2 are concerned with the equation
which has been the subject of great attention in the literature (see, for example, [
10,
11,
12]). Here and in the following, we assume that Equation (
16) is scalar (
), the kernel
is of convolution type,
is a continuous function for
and
A main assumption (see, for example, [
13]) that is generally made on the nonlinear term
G is that it represents a small perturbation, that is, there exists a function
such that
For Equation (
16), the
methods with Gregory convolution weights read, for
In order to describe the asymptotic behaviour of , we prove the following theorem.
Theorem 4. Assume that, for Equation (16), the following assumptions hold: Hypothesis 1.
Hypothesis 2. such that ,
Hypothesis 3. ,
Hypothesis 4. .
Then, for the numerical solution to (16) obtained with the method (18), one has Proof. From (
17) and (
18), with
Now, consider the equation
Since, from (
8),
are bounded, we have that
which is the convolution product of an
(
) and a vanishing (
) sequence and, therefore, tends to zero as
Therefore,
We choose
such that
and
such that
in assumption
With
the equation for
can be written in the more convenient form, (
11), for which all the assumptions of Theorem 2 hold. Thus, because of property (
7) on the asymptotic behaviour of starting weights and because of the vanishing behaviour of the kernel
tends to zero for
Therefore,
This ends the proof because, using the comparison theorem in [
14],
□
This theorem states that the numerical solution
of (
16) vanishes when the forcing term
f tends to zero for any step size
. The result is, of course, more interesting if we know that the analytical solution to (
16) tends to zero. This can be proved by means of a result that the authors proved in [
8]. To be more specific, the assumptions of Theorem 4 here assure that all the hypotheses of Theorem 9 in [
8] are satisfied, thus implying that
The following result, which we prove in the case of scalar equations, represents a generalisation of Theorem
in [
15], where the numerical stability of the
methods up to order 3 was proved under some restriction on the step length
In this paper, by applying Theorem 2 to the
(
6), we remove the constraint on the step size, and extend the investigation to any method in the class of
Theorem 5. Assume that, for Equation (5), with it holds that: - (i)
such that
- (ii)
,
- (iii)
,
- (iv)
Then. for the numerical solution obtained with the (6), it holds that Proof. Due to hypotheses (i) and (ii), there exists
such that
Let us fix
From the assumptions, it is clear that
with
So, (ii) implies that
for some
which we choose such that
Since, for (iii),
is a non-increasing function, we have
Then, referring to formulation (
11) of the numerical method with
we want to prove that
Here,
; thus,
So, (
21) is guaranteed by (
20). Furthermore, in view of (
19), it is
for any fixed
and, because of (ii) and (iii), also
Hence, as all the assumptions of Theorem 2 are accomplished,
without imposing any restriction on the step size
If, however, assumption (iii)
holds instead of (iii)
the step size
h has to be chosen such that
and
with
So, by Lemma 1 in [
9],
□
Consider now the following convolution equation:
Its solution has the form
where the resolvent kernel R is the solution of the equation:
If the kernel
of Equation (
22) is completely monotone, that is,
then (see, e.g., [
16]) the resolvent
is also completely monotone. Furthermore, the analytical solution
and its numerical approximation
obtained by a
method both tend to zero as
and
respectively, when the forcing term
tends to zero (see [
6]). We point out that if
then
as well, as
is the solution of a Volterra Equation (
23) where the kernel is completely monotone and the forcing tends to zero. The significance of completely monotone kernels in Volterra equations is underlined in [
13] (p. 27).
A nonlinear perturbation to (
22) yields
This equation can be written in terms of the unperturbed solution as (see [
13]):
Starting from assumption (
17) on the nonlinear term
and from the relation (
25), we want to investigate the asymptotic behaviour of the numerical solution to (
24) when it is known that
Theorem 6. Consider Equation (24), and assume that (17) holds for the function G and that: - 1.
is completely monotone and ,
- 2.
.
If then the solution and the numerical solution obtained by the method (6) satisfy Proof. For assumption
the solution
of Equation (
22) with a completely monotone kernel satisfies
This also holds true for its numerical approximation (see, for example, [
6]).
Considering Equation (
25), it is
Since
is completely monotone and
is bounded, the solution of the equation
satisfies
By using the comparison theorem (see, for example, [
17]),
also tends to zero. Considering the numerical solution
of (
26), we want to show, by means of Theorem 5, that
Then,
will also vanish.
This is true because all the assumptions of Theorem 5 are satisfied. Indeed:
- (i)
thus, and ; as a matter of fact, as R is the resolvent of a completely monotone vanishing kernel, it is, in turn, a completely monotone vanishing kernel.
- (ii)
since assumption holds,
- (iii)
since assumption holds,
- (iv)
as pointed out before, as it is the solution of the linear VIE (
22), with a completely monotone kernel and vanishing forcing term.
□
5. Numerical Examples
In this section, we report some numerical experiments in order to experimentally prove the theoretical results illustrated in
Section 4. For our experiments, we choose illustrative test equations and we use the
method (
6) with trapezoidal weights.
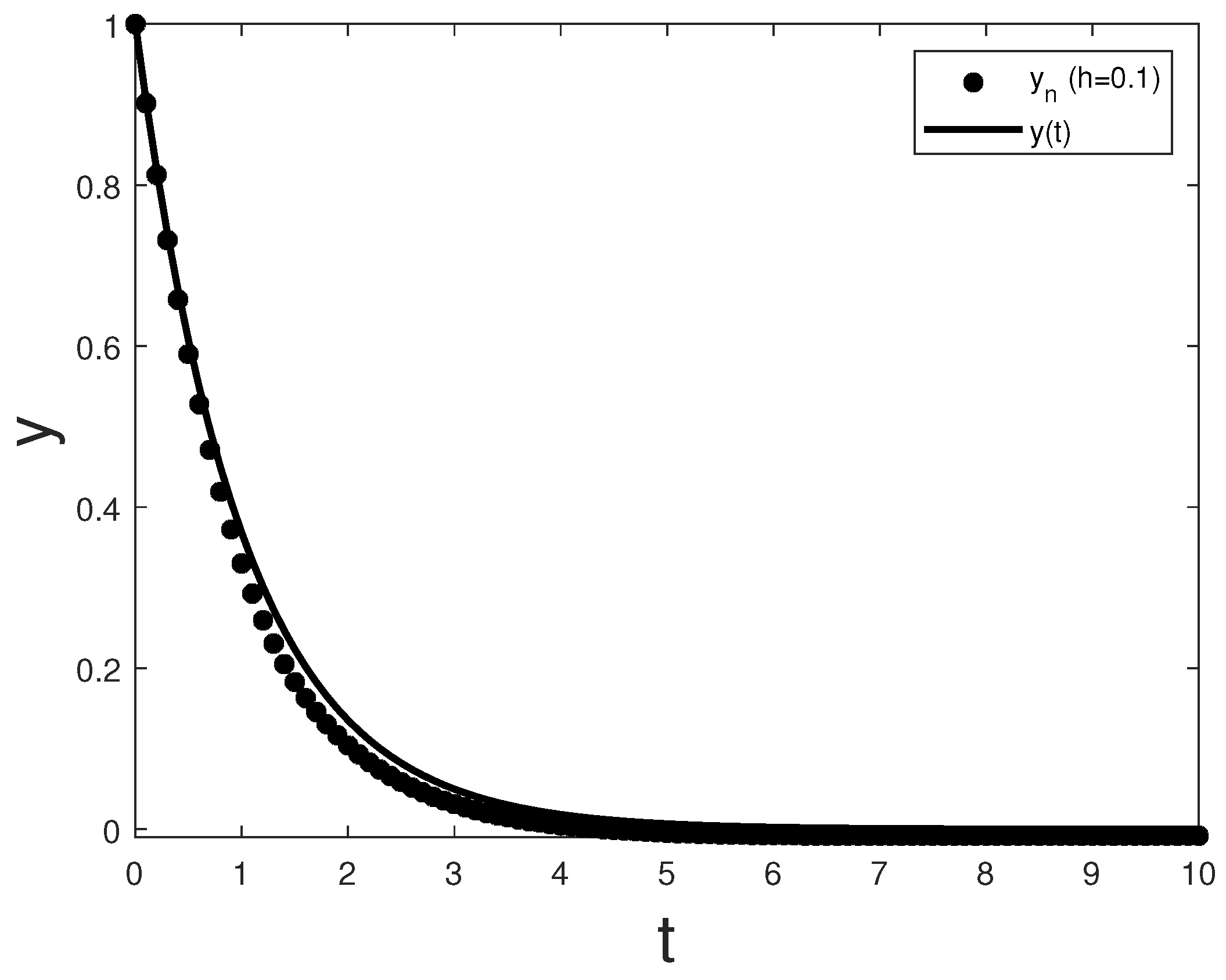
In our first example, we refer to Equation (
5) with the kernel
k given by
and the forcing term
such that the solution
Since
tends to zero as
t goes to infinity, all the assumptions of Theorem 3 are satisfied (for example, with
), and thus, both the numerical solution and the continuous one vanish. This is also clear in
Figure 1.
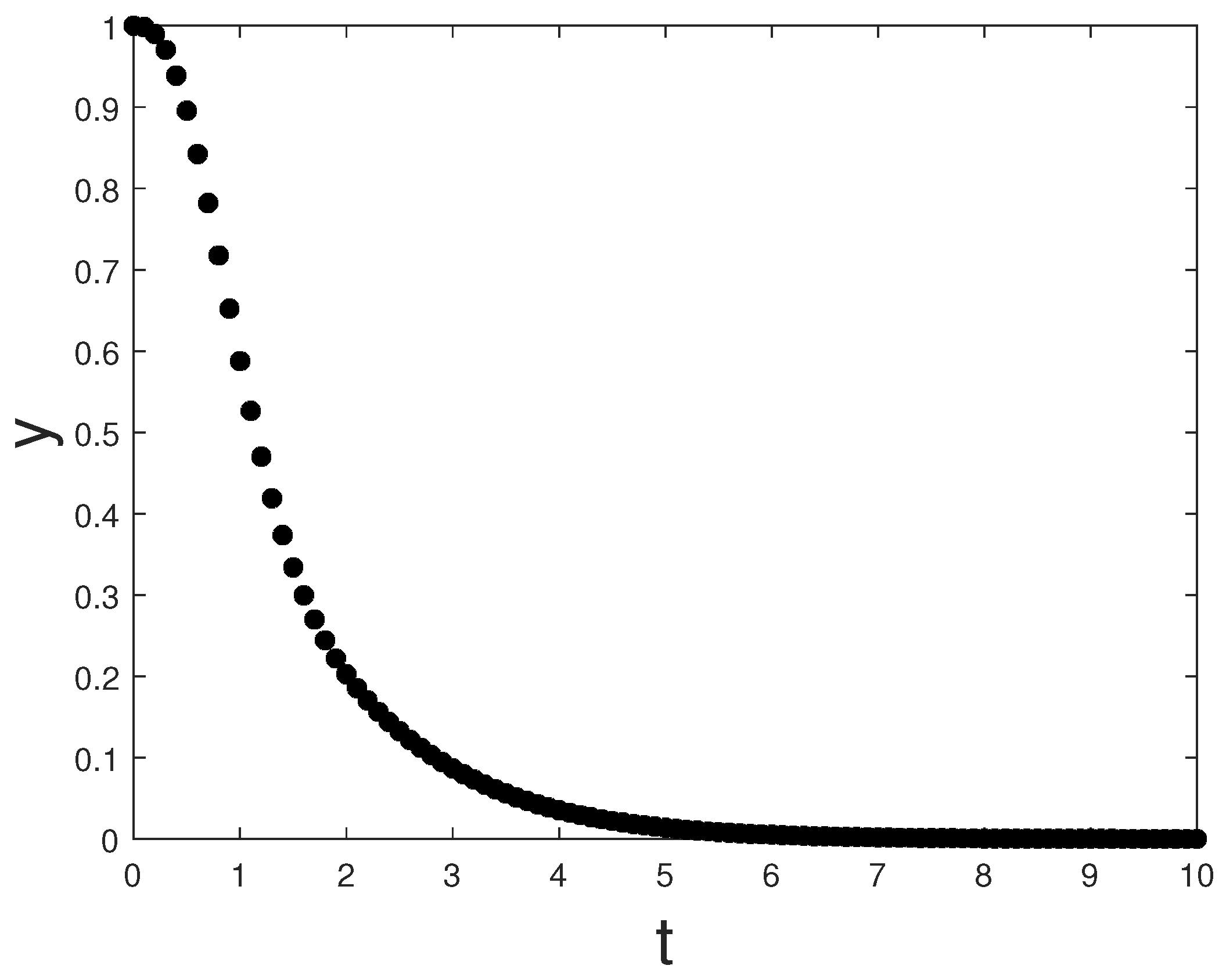
Now, consider Equation (
16) with
In
Figure 2, we draw the numerical solution obtained with step size
which clearly vanishes at infinity, according to Theorem 4, since all assumptions are accomplished with
and
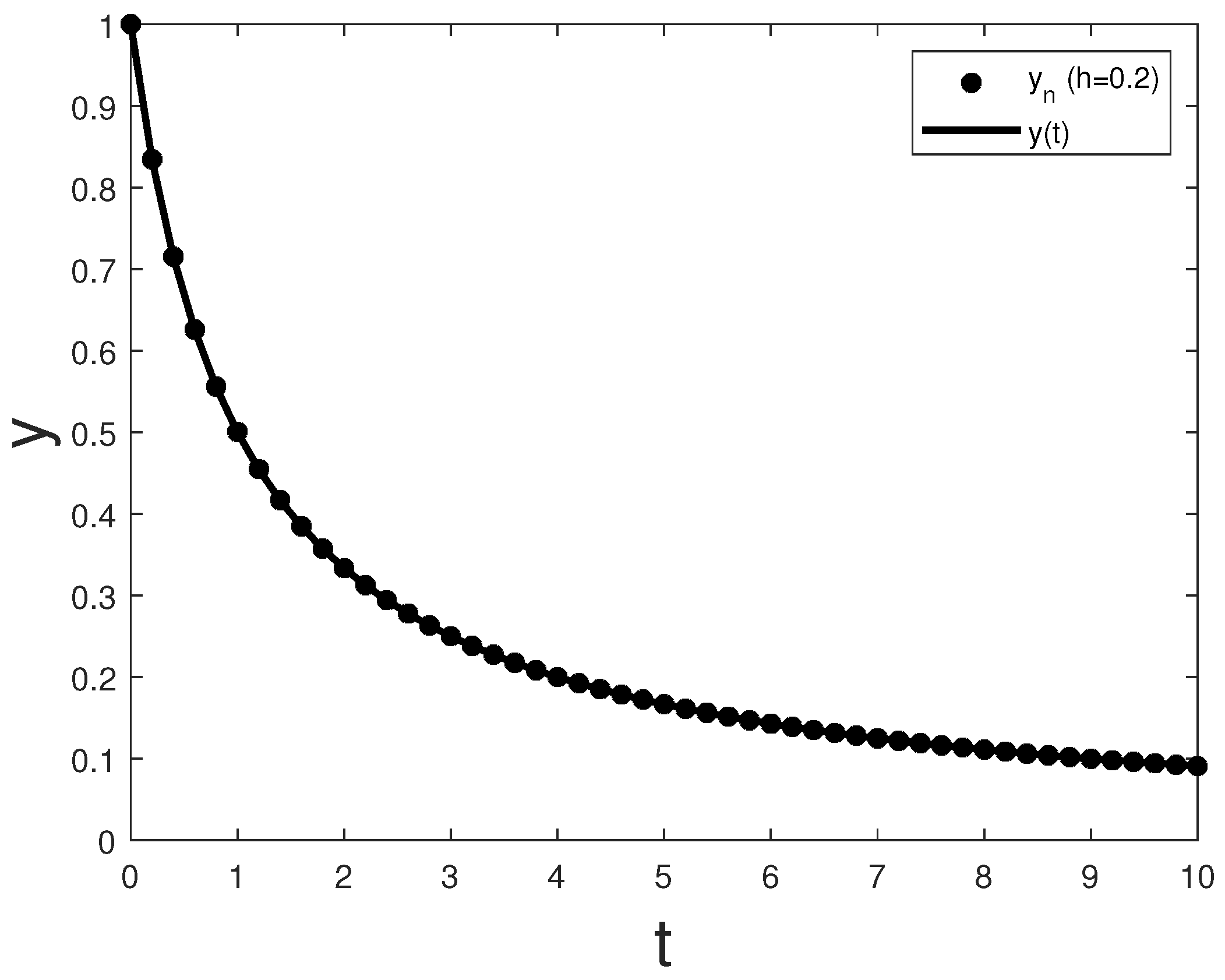
Our third example consists in Equation (
5) with
and
such that the solution
According to Theorem 5, with
since
tends to zero, the numerical solution vanishes regardless of the step size
thus replicating the asymptotic behaviour of the continuous one. This behaviour is shown in
Figure 3.
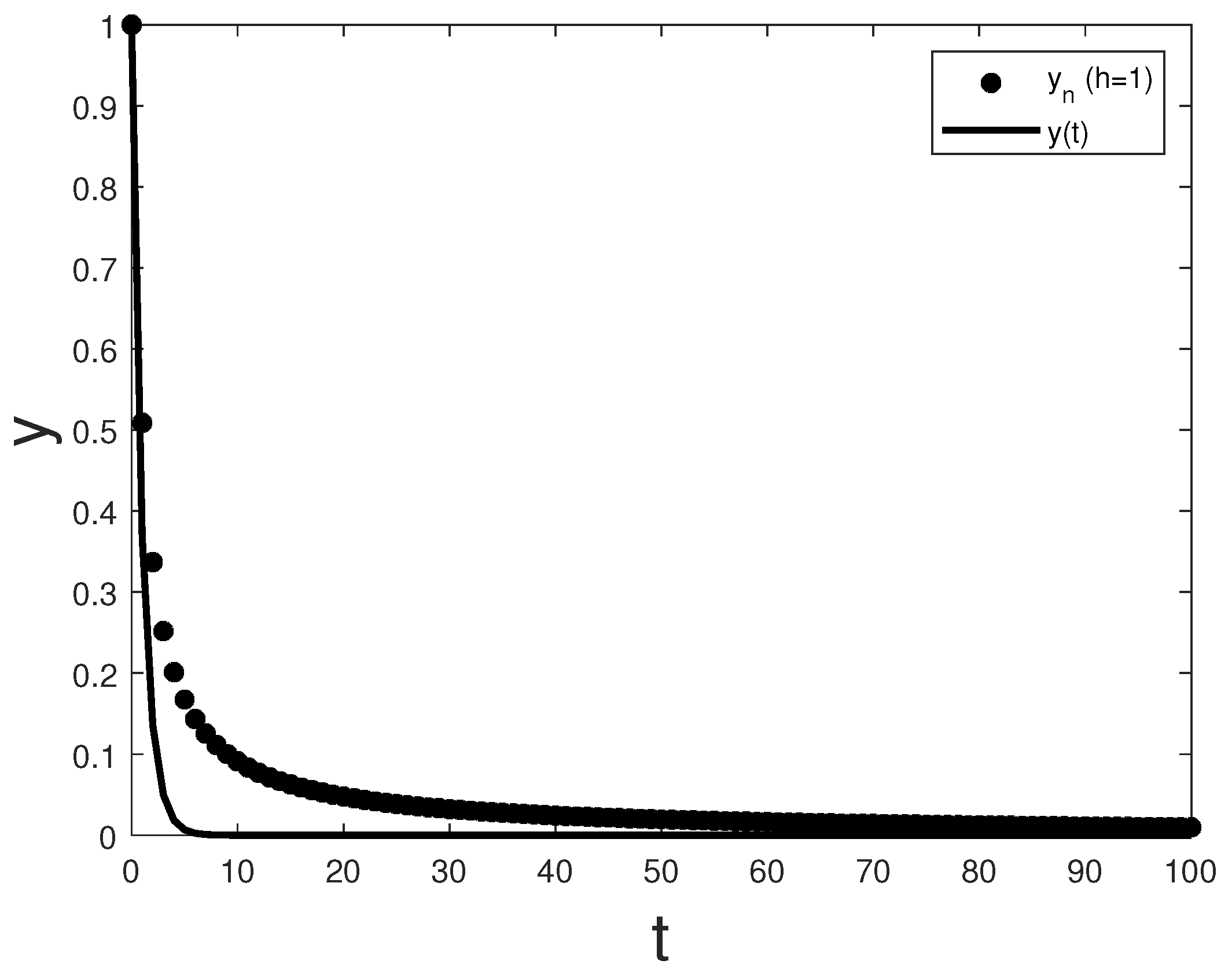
In all our experiments, we used sizes for the meshes that ensure reasonable accuracy in the numerical solution at finite times. Integration with larger discretisation steps naturally introduces greater errors on finite time intervals, but the numerical solution maintains the expected behaviour at infinity. Thus, this confirms the asymptotic-preserving characteristics of the numerical schemes without restrictions on
This can be observed, for example, in
Figure 4, again referring to example (
29) with



{kind=link}
{kind=link}
{kind=link}
{kind=link}



