Applications of Unmanned Aerial Vehicles in Mining from Exploration to Reclamation: A Review



Abstract
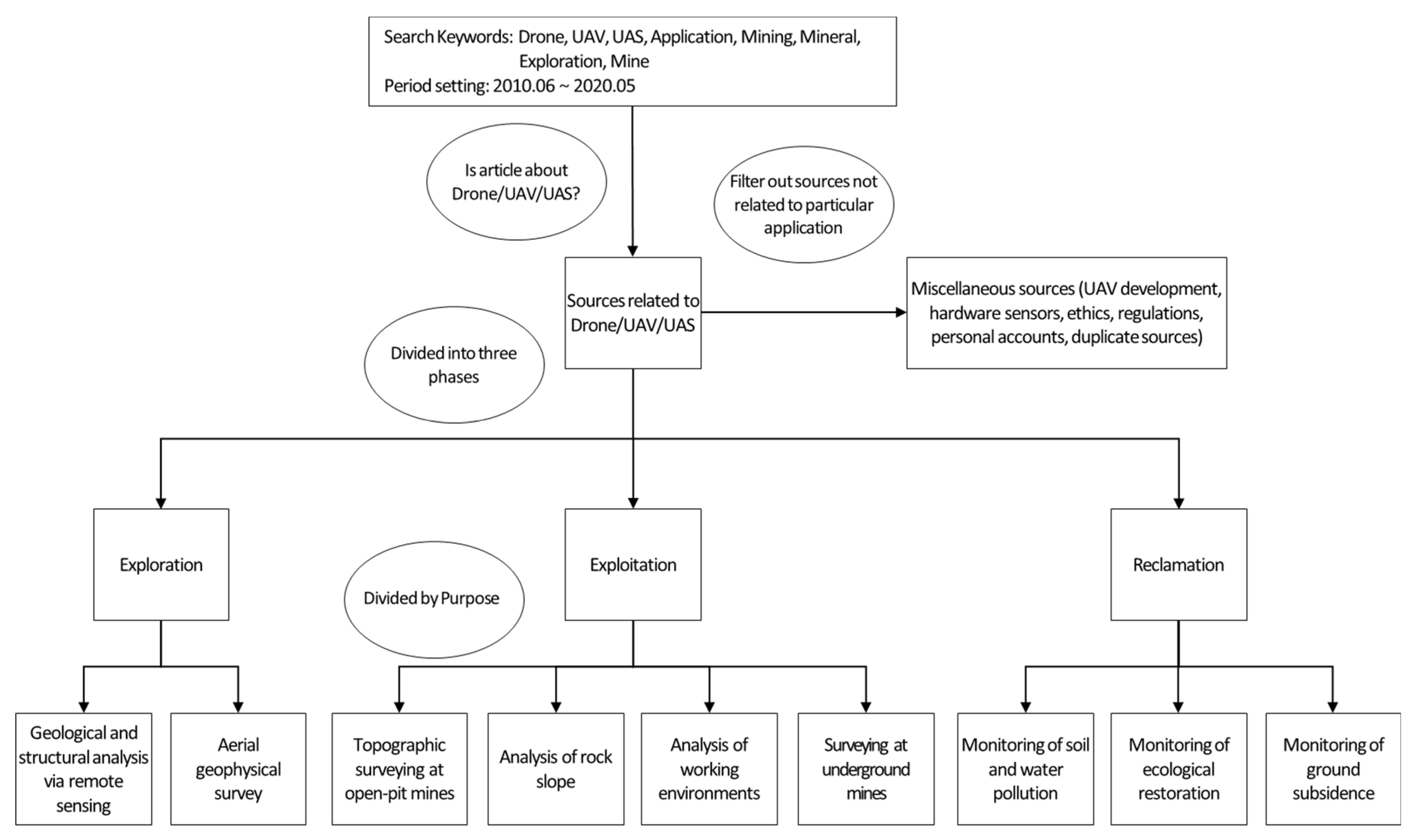
1. Introduction
- -
- What are the current applications of UAVs in mining at the exploration, exploitation, and reclamation phases?
- -
- What types of UAVs have been mainly used in mining?
- -
- What types of data have been acquired by sensors for UAV applications in mining?
- -
- What scales of the target area have been selected for UAV applications in mining?
- -
- What styles of flying control have been used for UAV applications in mining?
2. UAV Applications in the Mineral Exploration Phase
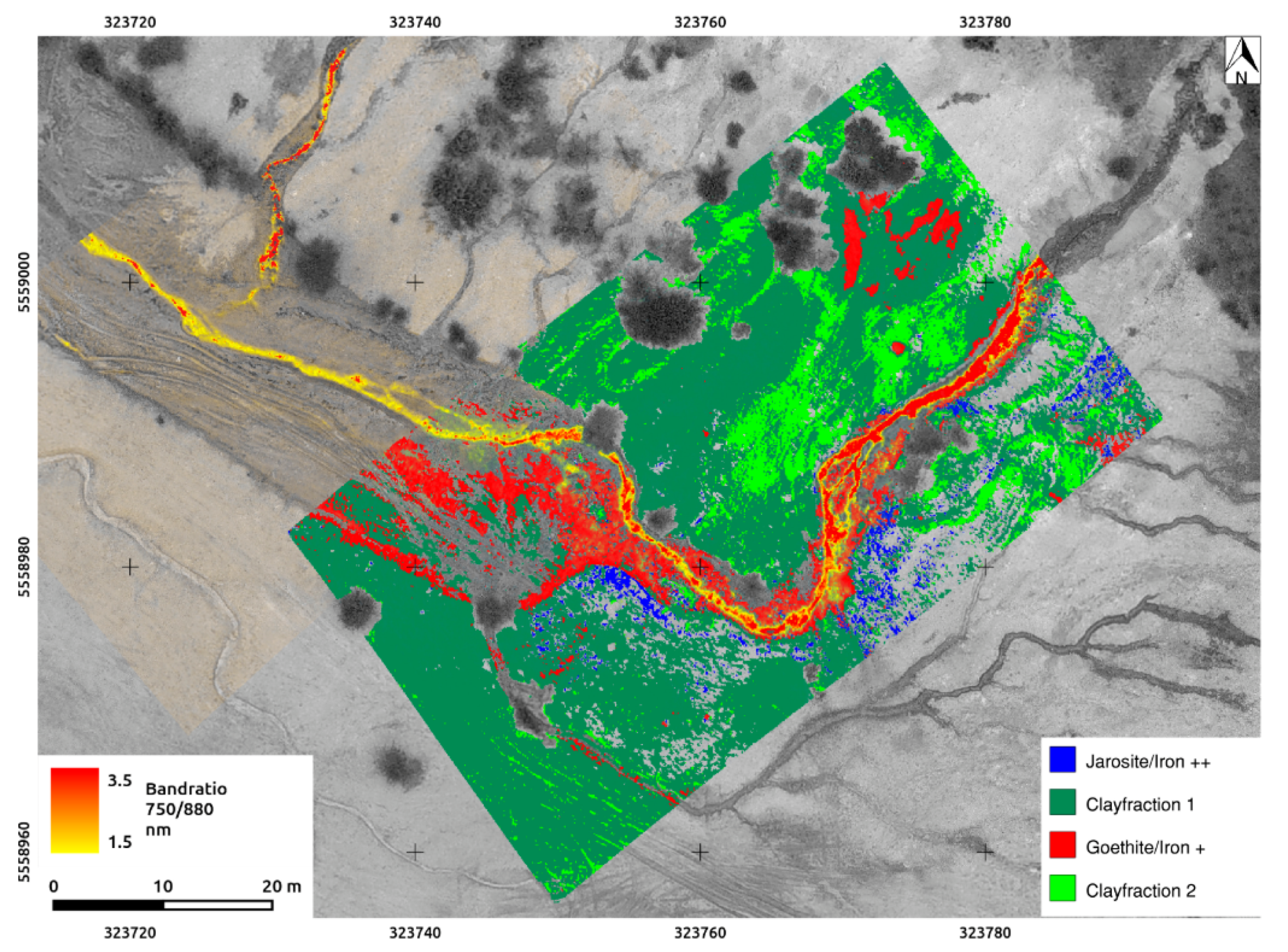
2.1. Geological and Structural Analysis via Remote Sensing
2.2. Aerial Geophysical Survey
3. UAV Applications in the Mineral Exploitation Phase
3.1. Topographic Surveying at Open-Pit Mines
3.2. Analysis of Rock Slope
3.3. Analysis of Working Environments
3.4. Surveying at Underground Mines
4. UAV Applications in the Mine Reclamation Phase
4.1. Monitoring of Soil and Water Pollution
4.2. Monitoring of Ecological Restoration
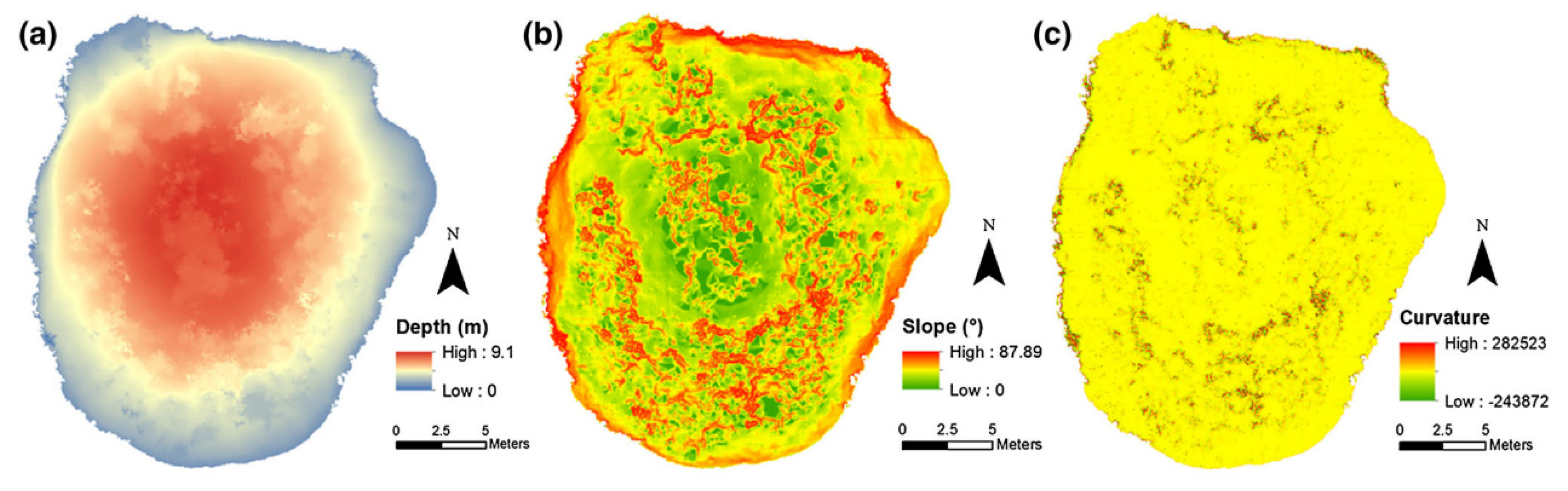
4.3. Monitoring of Ground Subsidence
5. Discussion
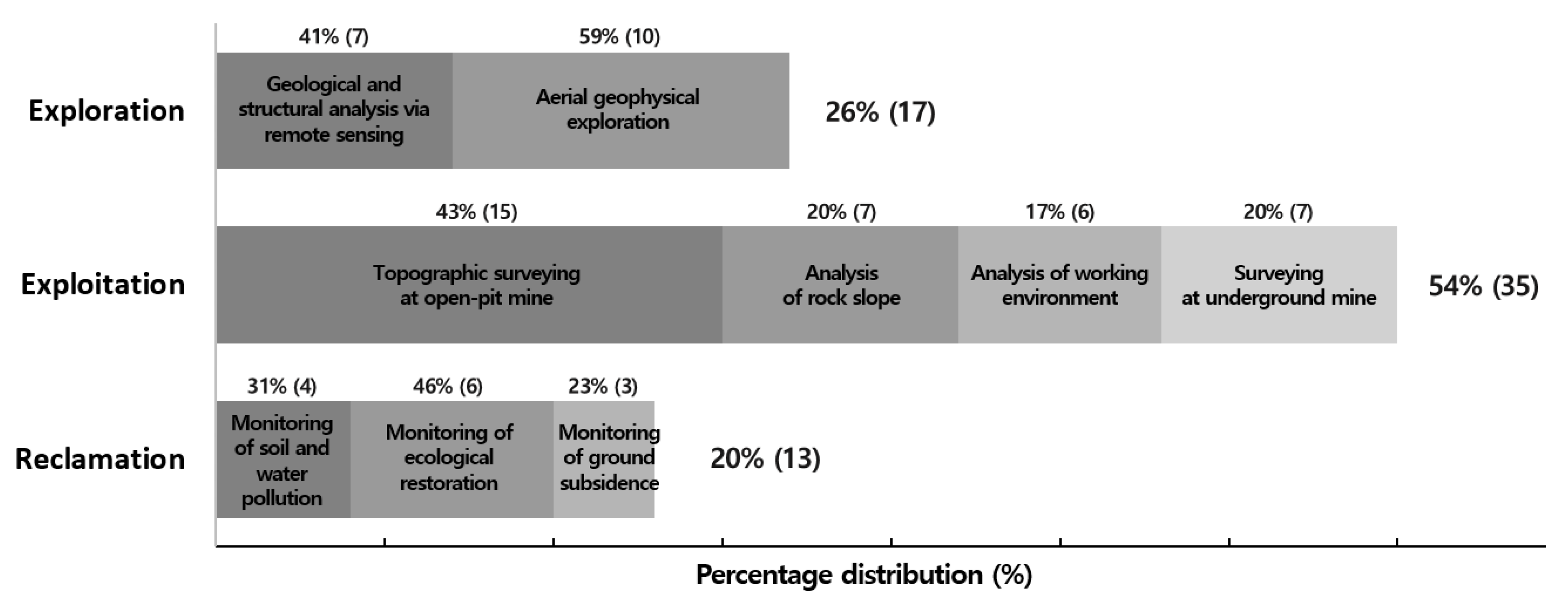
5.1. Current Applications of UAVs in Mining
- (1)
- Geological and structural analysis via remote sensing at the exploration phase (seven papers);
- (2)
- Airborne geophysical survey at the exploration phase (10 papers);
- (3)
- Topographic surveying in open-pit mines at the exploitation phase (15 papers);
- (4)
- Rock slope analysis at the exploitation phase (seven papers);
- (5)
- Working environment analysis at the exploitation phase (six papers);
- (6)
- Surveying in underground mines at the exploitation phase (seven papers);
- (7)
- Soil and water pollution monitoring at the reclamation phase (four papers);
- (8)
- Ecological restoration monitoring at the reclamation phase (six papers); and
- (9)
- Ground subsidence monitoring at the reclamation phase (three papers).
5.2. Types of UAV Used in Mining
5.3. Types of Data Acquired by Sensors for UAV Applications in Mining
5.4. Scales of Target Area Selected for UAV Applications in Mining
5.5. Styles of Flying Control Used for UAV Applications in Mining
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, P.; Chen, A.Y.; Huang, Y.N.; Han, J.Y.; Lai, J.S.; Kang, S.C.; Wu, T.H.; Wen, M.C.; Tsai, M.H. A review of rotorcraft unmanned aerial vehicle (UAV) developments and applications in civil engineering. Smart Struct. Syst. 2014, 13, 1065–1094. [Google Scholar] [CrossRef]
- De Melo, R.R.S.; Costa, D.B.; Álvares, J.S.; Irizarry, J. Applicability of unmanned aerial system (UAS) for safety inspection on construction sites. Saf. Sci. 2017, 98, 174–185. [Google Scholar] [CrossRef]
- Greenwood, W.W.; Lynch, J.P.; Zekkos, D. Applications of UAVs in civil infrastructure. J. Infrastruct. Syst. 2019, 25, 04019002. [Google Scholar] [CrossRef]
- Irizarry, J.; Costa, D.B. Exploratory study of potential applications of unmanned aerial systems for construction management tasks. J. Manag. Eng. 2016, 32, 05016001. [Google Scholar] [CrossRef]
- Gheisari, M.; Irizarry, J.; Walker, B.N. UAS4SAFETY: The Potential of Unmanned Aerial Systems for Construction Safety Applications. In Proceedings of the 2014 Construction Research Congress: Construction in a Global Network, Atlanta, GA, USA, 19–21 May 2014; pp. 1801–1810. [Google Scholar]
- Zhou, S.; Gheisari, M. Unmanned aerial system applications in construction: A systematic review. Constr. Innov. 2018, 18, 453–468. [Google Scholar] [CrossRef]
- Gheisari, M.; Esmaeili, B. Unmanned Aerial Systems (UAS) for Construction Safety Applications. In Proceedings of the 2016 Construction Research Congress: Old and New Construction Technologies Converge in Historic San Juan, San Juan, Puerto Rico, 31 May–2 June 2016; pp. 2642–2650. [Google Scholar]
- Barmpounakis, E.N.; Vlahogianni, E.I.; Golias, J.C. Unmanned Aerial Aircraft Systems for transportation engineering: Current practice and future challenges. Int. J. Transp. Sci. Technol. 2016, 5, 111–122. [Google Scholar] [CrossRef]
- Barbedo, J.G.A. A Review on the Use of Unmanned Aerial Vehicles and Imaging Sensors for Monitoring and Assessing Plant Stresses. Drones 2019, 3, 40. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Unal, I.; Topakci, M. A Review on Using Drones for Precision Farming Applications. In Proceedings of the 12th International Congress on Agricultural Mechanization and Energy, Cappadocia, Turkey, 3–6 September 2014; pp. 276–283. [Google Scholar]
- Mogili, U.R.; Deepak, B.B.V.L. Review on application of drone systems in precision agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Pádua, L.; Vanko, J.; Hruška, J.; Adão, T.; Sousa, J.J.; Peres, E.; Morais, R. UAS, sensors, and data processing in agroforestry: A review towards practical applications. Int. J. Remote Sens. 2017, 38, 2349–2391. [Google Scholar] [CrossRef]
- Hassler, S.C.; Baysal-Gurel, F. Unmanned Aircraft System (UAS) Technology and Applications in Agriculture. Agronomy 2019, 9, 618. [Google Scholar] [CrossRef]
- Villa, T.F.; Gonzalez, F.; Miljievic, B.; Ristovski, Z.D.; Morawska, L. An overview of small unmanned aerial vehicles for air quality measurements: Present applications and future prospectives. Sensors 2016, 16, 1072. [Google Scholar] [CrossRef]
- Goodbody, T.R.; Coops, N.C.; Marshall, P.L.; Tompalski, P.; Crawford, P. Unmanned aerial systems for precision forest inventory purposes: A review and case study. For. Chron. 2017, 93, 71–81. [Google Scholar] [CrossRef]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L.; et al. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Linchant, J.; Lisein, J.; Semeki, J.; Lejeune, P.; Vermeulen, C. Are unmanned aircraft systems (UAS s) the future of wildlife monitoring? A review of accomplishments and challenges. Mammal Rev. 2019, 45, 239–252. [Google Scholar] [CrossRef]
- Wang, D.; Shao, Q.; Yue, H. Surveying Wild Animals from Satellites, Manned Aircraft and Unmanned Aerial Systems (UAS s): A Review. Remote Sens. 2019, 11, 1308. [Google Scholar] [CrossRef]
- Rees, A.F.; Avens, L.; Ballorain, K.; Bevan, E.; Broderick, A.C.; Carthy, R.R.; Christianen, M.J.A.; Duclos, G.; Heithaus, M.R.; Johnston, D.W.; et al. The potential of unmanned aerial systems for sea turtle research and conservation: A review and future directions. Endanger. Species Res. 2018, 35, 81–100. [Google Scholar] [CrossRef]
- Rhee, D.S.; Kim, Y.D.; Kang, B.; Kim, D. Applications of unmanned aerial vehicles in fluvial remote sensing: An overview of recent achievements. KSCE J. Civ. Eng. 2018, 22, 588–602. [Google Scholar] [CrossRef]
- Klemas, V.V. Coastal and environmental remote sensing from unmanned aerial vehicles: An overview. J. Coast. Res. 2015, 31, 1260–1267. [Google Scholar] [CrossRef]
- Bryson, M.; Williams, S. Review of Unmanned Aerial Systems (UAS) for Marine Surveys; Australian Centre for Field Robotics, University of Sydney: Sydney, Australia, 2015. [Google Scholar]
- Kislik, C.; Dronova, I.; Kelly, M. UAVs in support of algal bloom research: A review of current applications and future opportunities. Drones 2018, 2, 35. [Google Scholar] [CrossRef]
- Bravo, R.; Leiras, A. Literature Review of the Application of UAVs in Humanitarian Relief. In Proceedings of the XXXV Encontro Nacional de Engenharia de Producao, Fortaleza, Brazil, 13–16 October 2015. [Google Scholar]
- Yuan, C.; Zhang, Y.; Liu, Z. A survey on technologies for automatic forest fire monitoring, detection, and fighting using unmanned aerial vehicles and remote sensing techniques. Can. J. Res. 2015, 45, 783–792. [Google Scholar] [CrossRef]
- Saleem, Y.; Rehmani, M.H.; Zeadally, S. Integration of cognitive radio technology with unmanned aerial vehicles: Issues, opportunities, and future research challenges. J. Netw. Comput. Appl. 2015, 50, 15–31. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Rosser, J.C., Jr.; Vignesh, V.; Terwilliger, B.A.; Parker, B.C. Surgical and medical applications of drones: A comprehensive review. JSLS 2018, 22, e2018.00018. [Google Scholar] [CrossRef]
- Hustrulid, W.A.; Kuchta, M.; Martin, R.K. Open Pit Mine Planning and Design, 3rd ed.; CRC Press: Leiden, The Netherlands, 2013; pp. 1–1288. ISBN 978-1-4822-2117-6. [Google Scholar]
- Choi, Y.; Baek, J.; Park, S. Review of GIS-Based Applications for Mining: Planning, Operation, and Environmental Management. Appl. Sci. 2020, 10, 2266. [Google Scholar] [CrossRef]
- Cress, J.J.; Hutt, M.; Sloan, J.; Bauer, M.; Feller, M.; Goplen, S. Us Geological Survey Unmanned Aircraft Systems (UAS) Roadmap 2014; US Department of the Interior, US Geological Survey: Reston, VA, USA, 2015.
- Lee, S.; Choi, Y. Reviews of unmanned aerial vehicle (drone) technology trends and its applications in the mining industry. Geosystem Eng. 2016, 19, 197–204. [Google Scholar] [CrossRef]
- Paisiriyuenyong, M.P. Unmanned Aerial Vehicle (UAV) Technology in Thailand, and Applying Marketing in the Mining Industry. Ph.D. Thesis, Thammasat University, Bangkok, Thailand, 2016. [Google Scholar]
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A review of UAV monitoring in mining areas: Current status and future perspectives. Int. J. Coal Sci. Technol. 2019, 6, 1–14. [Google Scholar] [CrossRef]
- Buczyńska, A. Remote sensing and GIS technologies in land reclamation and landscape planning processes on post-mining areas in the Polish and world literature. AIP Conf. Proc. 2020, 2209, 04002. [Google Scholar] [CrossRef]
- Dering, G.M.; Micklethwaite, S.; Thiele, S.T.; Vollgger, S.A.; Cruden, A.R. Review of drones, photogrammetry and emerging sensor technology for the study of dykes: Best practises and future potential. J. Volcanol. Geotherm. Res. 2019, 373, 148–166. [Google Scholar] [CrossRef]
- Madjid, M.Y.A.; Vandeginste, V.; Hampson, G.; Jordan, C.J.; Booth, A.D. Drones in carbonate geology: Opportunities and challenges, and application in diagenetic dolomite geobody mapping. Mar. Pet. Geol. 2018, 91, 723–734. [Google Scholar] [CrossRef]
- Beretta, F.; Rodrigues, A.L.; Peroni, R.L.; Costa, J.F.C.L. Automated lithological classification using UAV and machine learning on an open cast mine. Appl. Earth Sci. 2019, 128, 79–88. [Google Scholar] [CrossRef]
- Jakob, S.; Zimmermann, R.; Gloaguen, R. Processing of Drone-Borne Hyperspectral Data for Geological Applications. In Proceedings of the 2016 8th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Los Angeles, CA, USA, 21–24 August 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Jakob, S.; Zimmermann, R.; Gloaguen, R. The need for accurate geometric and radiometric corrections of drone-borne hyperspectral data for mineral exploration: Mephysto—A toolbox for pre-processing drone-borne hyperspectral data. Remote Sens. 2017, 9, 88. [Google Scholar] [CrossRef]
- Kirsch, M.; Lorenz, S.; Zimmermann, R.; Tusa, L.; Möckel, R.; Hödl, P.; Booysen, R.; Khodadadzadeh, M.; Gloaguen, R. Integration of terrestrial and drone-borne hyperspectral and photogrammetric sensing methods for exploration mapping and mining monitoring. Remote Sens. 2018, 10, 1366. [Google Scholar] [CrossRef]
- Heincke, B.; Jackisch, R.; Saartenoja, A.; Salmirinne, H.; Rapp, S.; Zimmermann, R.; Pirttijärvi, M.; Sörensen, E.V.; Gloaguen, R.; Ek, L.; et al. Developing multi-sensor drones for geological mapping and mineral exploration: Setup and first results from the MULSEDRO project. Geol. Surv. Den. Greenl. Bull. 2019, 43, e2019430302. [Google Scholar] [CrossRef]
- Jackisch, R.; Madriz, Y.; Zimmermann, R.; Pirttijärvi, M.; Saartenoja, A.; Heincke, B.H.; Salmirinne, H.; Kujasalo, J.-P.; Andreani, L.; Gloaguen, R.; et al. Drone-Borne Hyperspectral and Magnetic Data Integration: Otanmäki Fe-Ti-V Deposit in Finland. Remote Sens. 2019, 11, 2084. [Google Scholar] [CrossRef]
- Malehmir, A.; Dynesius, L.; Paulusson, K.; Paulusson, A.; Johansson, H.; Bastani, M.; Wedmark, P.; Marsden, P. The potential of rotary-wing UAV-based magnetic surveys for mineral exploration: A case study from central Sweden. Lead. Edge 2017, 36, 552–557. [Google Scholar] [CrossRef]
- Eck, C.; Imbach, B. Aerial magnetic sensing with an UAV helicopter. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, 81–85. [Google Scholar] [CrossRef]
- Stoll, J.; Moritz, D. Unmanned Aircraft Systems for Rapid Near Surface Geophysical Measurements. In Proceedings of the 75th EAGE Conference & Exhibition-Workshops, London, UK, 10–13 June 2013; European Association of Geoscientists & Engineers: Houten, The Netherlands; p. cp-349-00062. [Google Scholar] [CrossRef]
- Parshin, A.V.; Morozov, V.A.; Blinov, A.V.; Kosterev, A.N.; Budyak, A.E. Low-altitude geophysical magnetic prospecting based on multirotor UAV as a promising replacement for traditional ground survey. Geo-Spat. Inf. Sci. 2018, 21, 67–74. [Google Scholar] [CrossRef]
- Azpúrua, H.; Potje, G.A.; Rezeck, P.A.; Freitas, G.M.; Uzeda Garcia, L.G.; Nascimento, E.R.; Macharet, D.G.; Campos, M.F. Cooperative digital magnetic-elevation maps by small autonomous aerial robots. J. Field Robot. 2019, 36, 1378–1398. [Google Scholar] [CrossRef]
- Walter, C.; Braun, A.; Fotopoulos, G. High-resolution unmanned aerial vehicle aeromagnetic surveys for mineral exploration targets. Geophys. Prospect. 2020, 68, 334–349. [Google Scholar] [CrossRef]
- Parvar, K.; Braun, A.; Layton-Matthews, D.; Burns, M. UAV magnetometry for chromite exploration in the Samail ophiolite sequence, Oman. J. Unmanned Veh. Syst. 2017, 6, 57–69. [Google Scholar] [CrossRef]
- Cunningham, M.; Samson, C.; Wood, A.; Cook, I. Aeromagnetic surveying with a rotary-wing unmanned aircraft system: A case study from a zinc deposit in Nash Creek, New Brunswick, Canada. Pure Appl. Geophys. 2018, 175, 3145–3158. [Google Scholar] [CrossRef]
- Parshin, A.; Grebenkin, N.; Morozov, V.; Shikalenko, F. Research Note: First results of a low-altitude unmanned aircraft system gamma survey by comparison with the terrestrial and aerial gamma survey data. Geophys. Prospect. 2018, 66, 1433–1438. [Google Scholar] [CrossRef]
- Li, W.J.; Qin, X.W.; Gan, X.P. The IGGE UAV Aero Magnetic and Radiometric Survey System. In Near Surface Geoscience 2014, Proceedings of the 20th European Meeting of Environmental and Engineering Geophysics, Athens, Greece, 14–18 September 2014; European Association of Geoscientists & Engineers: Houten, The Netherlands, 2014. [Google Scholar]
- Wang, Q.; Wu, L.; Chen, S.; Shu, D.; Xu, Z.; Li, F.; Wang, R. Accuracy evaluation of 3D geometry from low-attitude UAV images: A case study at zijin mine. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 297–300. [Google Scholar] [CrossRef]
- Cho, S.J.; Bang, E.S.; Kang, I.M. Construction of precise digital terrain model for nonmetal open-pit mine by using unmanned aerial photograph. Econ. Env. Geol. 2015, 48, 205–212. [Google Scholar] [CrossRef]
- Lee, S.; Choi, Y. Topographic survey at small-scale open-pit mines using a popular rotary-wing unmanned aerial vehicle (drone). Tunn. Undergr. Space 2015, 25, 462–469. [Google Scholar] [CrossRef]
- Lee, S.; Choi, Y. On-site demonstration of topographic surveying techniques at open-pit mines using a fixed-wing unmanned aerial vehicle (drone). Tunn. Undergr. Space 2015, 25, 462–468. [Google Scholar] [CrossRef]
- Lee, S.; Choi, Y. Comparison of topographic surveying results using a fixed-wing and a popular rotary-wing unmanned aerial vehicle (drone). Tunn. Undergr. Space 2016, 26, 24–31. [Google Scholar] [CrossRef]
- Chen, J.; Li, K.; Chang, K.J.; Sofia, G.; Tarolli, P. Open-pit mining geomorphic feature characterisation. Int. J. Appl. Earth Obs. Geoinf. 2016, 42, 76–86. [Google Scholar] [CrossRef]
- Sofia, G.; Mariniello, F.; Tarolli, P. A new landscape metric for the identification of terraced sites: The slope local length of auto-correlation (SLLAC). ISPRS J. Photogramm. Remote Sens. 2014, 96, 123–133. [Google Scholar] [CrossRef]
- Rossi, P.; Mancini, F.; Dubbini, M.; Mazzone, F.; Capra, A. Combining nadir and oblique UAV imagery to reconstruct quarry topography: Methodology and feasibility analysis. Eur. J. Remote. Sens. 2017, 50, 211–221. [Google Scholar] [CrossRef]
- Chirico, P.G.; DeWitt, J.D. Mapping informal small-scale mining features in a data-sparse tropical environment with a small UAS. J. Unmanned Veh. Syst. 2017, 5, 69–91. [Google Scholar] [CrossRef]
- Gil, M.; Frąckiewicz, P. Optimization of the Location of Observation Network Points in Open-Pit Mining’s. In Proceedings of the 26th Geographic Information Systems Conference and Exhibition “GIS ODYSSEY 2019”, Split, Croatia, 2–6 September 2019; Croatian Information Technology Society-GIS Forum: Zagreb, Croatia, 2019; pp. 73–80. [Google Scholar]
- Tscharf, A.; Rumpler, M.; Fraundorfer, F.; Mayer, G.; Bischof, H. On the Use of UAV s in Mining and Archaeology-Geo-Accurate 3d Reconstructions Using Various Platforms and Terrestrial Views. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 2, 15–22. [Google Scholar] [CrossRef]
- Xiang, J.; Chen, J.; Sofia, G.; Tian, Y.; Tarolli, P. Open-pit mine geomorphic changes analysis using multi-temporal UAV survey. Environ. Earth Sci. 2018, 77, 220. [Google Scholar] [CrossRef]
- Beretta, F.; Shibata, H.; Cordova, R.; Peroni, R.D.L.; Azambuja, J.; Costa, J.F.C.L. Topographic modelling using UAVs compared with traditional survey methods in mining. REM-Int. Eng. J. 2018, 71, 463–470. [Google Scholar] [CrossRef]
- Kršák, B.; Blišťan, P.; Pauliková, A.; Puškárová, P.; Kovanič, Ľ.; Palková, J.; Zelizňaková, V. Use of low-cost UAV photogrammetry to analyze the accuracy of a digital elevation model in a case study. Measurement 2016, 91, 276–287. [Google Scholar] [CrossRef]
- Ge, L.; Li, X.; Ng, A.H.M. UAV for Mining Applications: A Case Study at an Open-Cut Mine and a Longwall Mine in New South Wales, Australia. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 5422–5425. [Google Scholar] [CrossRef]
- Esposito, G.; Mastrorocco, G.; Salvini, R.; Oliveti, M.; Starita, P. Application of UAV photogrammetry for the multi-temporal estimation of surface extent and volumetric excavation in the Sa Pigada Bianca open-pit mine, Sardinia, Italy. Environ. Earth Sci. 2017, 76, 103. [Google Scholar] [CrossRef]
- McLeod, T.K. 3D Imaging Applications in Earth Sciences Using Video Data Acquired from an Unmanned Aerial Vehicle. Ph.D. Thesis, Carleton University, Ottawa, ON, Canada, 2012. [Google Scholar]
- McLeod, T.; Samson, C.; Labrie, M.; Shehata, K.; Mah, J.; Lai, P.; Wang, L.; Elder, J.H. Using video acquired from an unmanned aerial vehicle (UAV) to measure fracture orientation in an open-pit mine. Geomatica 2013, 67, 173–180. [Google Scholar] [CrossRef]
- Vrublová, D.; Kapica, R.; Jiránková, E.; Struś, A. Documentation of landslides and inaccessible parts of a mine using an unmanned UAV system and methods of digital terrestrial photogrammetry. Geosci. Eng. 2015, 61, 8–19. [Google Scholar] [CrossRef]
- Blistan, P.; Kovanič, Ľ.; Zelizňaková, V.; Palková, J. Using UAV photogrammetry to document rock outcrops. Acta Montan. Slovaca 2016, 21, 154–161. [Google Scholar]
- Beretta, F.; Rodrigues, Á.L.; Peroni, R.D.L.; Costa, J.F.C.L. Using UAV for automatic lithological classification of open pit mining front. REM-Int. Eng. J. 2019, 72, 17–23. [Google Scholar] [CrossRef]
- Katuruza, M.; Birch, C. The use of unmanned aircraft system technology for highwall mapping at Isibonelo Colliery, South Africa. J. S. Afr. Inst. Min. Metall. 2019, 119, 291–295. [Google Scholar] [CrossRef]
- Stead, D.; Donati, D.; Wolter, A.; Sturzenegger, M. Application of Remote Sensing to the Investigation of Rock Slopes: Experience Gained and Lessons Learned. ISPRS Int. J. Geoinf. 2019, 7, 296. [Google Scholar] [CrossRef]
- Alvarado, M.; Gonzalez, F.; Fletcher, A.; Doshi, A. Towards the development of a low cost airborne sensing system to monitor dust particles after blasting at open-pit mine sites. Sensors 2015, 15, 19667–19687. [Google Scholar] [CrossRef]
- Bamford, T.; Esmaeili, K.; Schoellig, A.P. A real-time analysis of post-blast rock fragmentation using UAV technology. Int. J. Min. Reclam. Environ. 2017, 31, 439–456. [Google Scholar] [CrossRef]
- Bamford, T.; Esmaeili, K.; Schoellig, A.P. Aerial Rock Fragmentation Analysis in Low-Light Condition Using UAV Technology. In Proceedings of the 38th Application of Computers and Operation Research in the Mineral Industry, Golden, CO, USA, 9–11 August 2017. [Google Scholar]
- Motepe, S. Software Integration for Human Detection in Mining UAV Systems. Master’s Thesis, University of KwaZulu Natal, Durban, South Africa, 2013. [Google Scholar]
- Péter, H.; László, D.; János, V.P. Civilian Use of Drones in the Life of Mining Rescue Helicopters. In Proceedings of the 2016 IEEE 17th International Symposium on Computational Intelligence and Informatics (CINTI), Budapest, Hungary, 17–19 November 2016; pp. 299–302. [Google Scholar] [CrossRef]
- Ranjan, A.; Panigrahi, B.; Sahu, H.B.; Misra, P. SkyHelp: UAV Assisted Emergency Communication in Deep Open Pit Mines. In Proceedings of the 1st International Workshop on Internet of People, Assistive Robots and Things, Munich, Germany, 10 June 2018; pp. 31–36. [Google Scholar]
- Turner, R.M.; Bhagwat, N.P.; Galayda, L.J.; Knoll, C.S.; Russell, E.A.; MacLaughlin, M.M. Geotechnical Characterization of Underground Mine Excavations from UAV-Captured Photogrammetric & Thermal Imagery. In Proceedings of the ARMA 2018: 52nd US Rock Mechanics/Geomechanics Symposium, Seattle, WA, USA, 17–20 June 2018. [Google Scholar]
- Kanellakis, C.; Nikolakopoulos, G. Evaluation of Visual Localization Systems in Underground Mining. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 539–544. [Google Scholar]
- Freire, G.R.; Cota, R.F. Capture of Images in Inaccessible Areas in an Underground Mine Using an Unmanned Aerial Vehicle. In Proceedings of the First International Conference on Underground Mining Technology, Sudbury, ON, Canada, 11–13 October 2017; Australian Centre for Geomechanics: Crawley, Australia, 2017. [Google Scholar]
- Raj, P. Use of Drones in an Underground Mine for Geotechnical Monitoring. Master’s. Thesis, The University of Arizona, Phoenix, AZ, USA, 2019. [Google Scholar]
- Turner, R.M.; MacLaughlin, M.M.; Iverson, S.R. Identifying and mapping potentially adverse discontinuities in underground excavations using thermal and multispectral UAV imagery. Eng. Geol. 2020, 266, 105470. [Google Scholar] [CrossRef]
- Mitchell, J.; Marshall, J.A. Design of a Novel Auto-Rotating UAV Platform for Underground Mine Cavity Surveying. 2017. Available online: http://hdl.handle.net/1974/15277 (accessed on 4 April 2020).
- Azhari, F.; Kiely, S.; Sennersten, C.; Lindley, C.; Matuszak, M.; Hogwood, S. A Comparison of Sensors for Underground Void Mapping by Unmanned Aerial Vehicles. In Proceedings of the First International Conference on Underground Mining Technology, Sudbury, ON, Canada, 11–13 October 2017; Australian Centre for Geomechanics: Crawley, Australia, 2017; pp. 419–430. [Google Scholar]
- Martin, P.G.; Payton, O.D.; Fardoulis, J.S.; Richards, D.A.; Scott, T.B. The use of unmanned aerial systems for the mapping of legacy uranium mines. J. Environ. Radioact. 2015, 143, 135–140. [Google Scholar] [CrossRef]
- Fang, Y.; Hu, Z.; Xu, L.; Wong, A.; Clausi, D.A. Estimation of Iron Concentration in Soil of a Mining Area from UAV-Based Hyperspectral Imagery. In Proceedings of the 2019 10th Workshop on Hyperspectral Imaging and Signal Processing: Evolution in Remote Sensing (WHISPERS), Amsterdam, The Netherlands, 24–26 September 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Jackisch, R.; Lorenz, S.; Zimmermann, R.; Möckel, R.; Gloaguen, R. Drone-borne hyperspectral monitoring of acid mine drainage: An example from the Sokolov Lignite District. Remote Sens. 2018, 10, 385. [Google Scholar] [CrossRef]
- Castendyk, D.N.; Straight, B.J.; Voorhis, J.C.; Somogyi, M.K.; Jepson, W.E.; Kucera, B.L. Using Aerial Drones to Select Sample Depths in Pit Lakes. In Proceedings of the 13th International Conference on Mine Closure, Australian Centre for Geomechanics, Perth, Australia, 2–5 September 2019; pp. 1113–1126. [Google Scholar] [CrossRef]
- Lee, D.G.; Yu, Y.G.; Ru, J.H.; Lee, H.J. Change monitoring in ecological restoration area of open-pit mine using drone photogrammetry. J. Korean Soc. Geospat. Inf. Syst. 2016, 24, 97–104. [Google Scholar] [CrossRef]
- Urban, R.; Štroner, M.; Křemen, T.; Braun, J.; Moeser, M. A novel approach to estimate systematic and random error of terrain derived from UAV s: A case study from a post-mining site. Acta Montan. Slovaca 2018, 23, 325–336. [Google Scholar]
- Moudrý, V.; Urban, R.; Štroner, M.; Komárek, J.; Brouček, J.; Prošek, J. Comparison of a commercial and home-assembled fixed-wing UAV for terrain mapping of a post-mining site under leaf-off conditions. Int. J. Remote Sens. 2019, 40, 555–572. [Google Scholar] [CrossRef]
- Moudrý, V.; Gdulová, K.; Fogl, M.; Klápště, P.; Urban, R.; Komárek, J.; Moudrá, L.; Štroner, M.; Barták, V.; Solský, M.; et al. Comparison of leaf-off and leaf-on combined UAV imagery and airborne LiDAR for assessment of a post-mining site terrain and vegetation structure: Prospects for monitoring hazards and restoration success. Appl. Geogr. 2019, 104, 32–41. [Google Scholar] [CrossRef]
- Padró, J.C.; Carabassa, V.; Balagué, J.; Brotons, L.; Alcañiz, J.M.; Pons, X. Monitoring opencast mine restorations using Unmanned Aerial System (UAS) imagery. Sci. Total Environ. 2019, 657, 1602–1614. [Google Scholar] [CrossRef]
- Strohbach, B.J.; Hauptfleisch, M.L.; Green-Chituti, A.; Diener, S.M. Determining rehabilitation effectiveness at the Otjikoto Gold Mine, Otjozondjupa Region, Namibia, using high-resolution NIR aerial imagery. Namib. J. Environ. 2018, 2, 134–146. [Google Scholar]
- Suh, J.; Choi, Y. Mapping hazardous mining-induced sinkhole subsidence using unmanned aerial vehicle (drone) photogrammetry. Environ. Earth Sci. 2017, 76, 144. [Google Scholar] [CrossRef]
- Rauhala, A.; Tuomela, A.; Davids, C.; Rossi, P.M. UAV remote sensing surveillance of a mine tailings impoundment in Sub-Arctic conditions. Remote Sens. 2017, 9, 1318. [Google Scholar] [CrossRef]
- Dawei, Z.; Lizhuang, Q.; Demin, Z.; Baohui, Z.; Lianglin, G. Unmanned Aerial Vehicle (UAV) Photogrammetry Technology for Dynamic Mining Subsidence Monitoring and Parameter Inversion: A Case Study in China. IEEE Access 2020, 8, 16372–16386. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Application | UAV Type | Type of Data Acquired by Sensors | Scale of Target Area | Flying Control Style |
|---|---|---|---|---|
| Geological and structural analysis via remote sensing | Fixed wing | Image or video data from digital camera | Regional scale 1 | Manual |
| Aerial geophysical survey | Rotary wing | Multi- and hyperspectral, thermal image or data | Mine scale 2 | Autonomous |
| Topographic surveying at open-pit mines | Both | Geophysics data | Zonal scale 3 | Semi-autonomous |
| Rock slope analysis | Environmental monitoring data (e.g., dust, temperature) | |||
| Working environment analysis | Distance measuring data | |||
| Surveying at underground mines | ||||
| Soil and water pollution monitoring | ||||
| Ecological restoration monitoring | ||||
| Ground subsidence monitoring |
| Reference | Year | Aim of Study | UAV Type | Acquisition Data Type | Target Area Scale | Flying Control Style |
|---|---|---|---|---|---|---|
| Madjid et al. [39] | 2018 | Presenting a photogrammetry method using image taken by drones | Rotary wing | Digital camera image | Regional scale | Semi-autonomous 1 |
| Beretta et al. [40] | 2019 | Development of automation technology for lithological classification using small UAVs and machine learning (ML) algorithm | Rotary wing | Digital camera image | Zonal scale | Unknown |
| Jakob et al. [41] | 2016 | Development of toolbox for processing hyperspectral data obtained through drones | Both | Hyperspectral image | Regional scale | Autonomous |
| Jakob et al. [42] | 2017 | |||||
| Kirsch et al. [43] | 2018 | Presenting an integrated workflow for the geometrically and spectrally combination of aerial photograph and hyperspectral data | Both | Digital camera image Hyperspectral data | Zonal scale | Unknown |
| Heincke et al. [44] | 2019 | Setting up the UAS system to collect magnetic and hyperspectral data | Both | Magnetic data Hyperspectral data | Zonal scale | Unknown |
| Jackisch et al. [45] | 2019 | Proposal of a data collection and processing method for multi-sensor survey combining optical remote sensing and magnetic data | Both | Multispectral data Hyperspectral data Magnetic data | Regional scale | Semi-autonomous |
| Reference | Year | Aim of Study | UAV Type | Acquisition Data Type | Target Area Scale | Flying Control Style |
|---|---|---|---|---|---|---|
| Eck and Imbach [47] | 2011 | Presentation of technical challenges of integrating high-resolution magnetic system, UAV mission planning, and data analysis | Rotary wing | Magnetic data | Zonal scale | Autonomous |
| Stoll and Moritz [48] | 2013 | Conducting UAS-based magnetic survey to detect the location of buried objects | Rotary wing | Magnetic data | Zonal scale | Semi-autonomous |
| Malehmir et al. [46] | 2017 | Evaluation of the potential of rotary-wing UAV systems to target iron-oxide deposits | Rotary wing | Magnetic data | Regional scale | Unknown |
| Parshin et al. [49] | 2018 | Development of heavy multirotor UAVs to improve the scale of aeromagnetic map | Rotary wing | Magnetic data | Regional scale | Autonomous |
| Azpúrua et al. [50] | 2019 | Presenting a new approach for creating 3-D magnetic maps using small UAVs | Rotary wing | Magnetic data | Mine scale | Autonomous |
| Walter et al. [51] | 2020 | Conducting aeromagnetic survey using a 3-D UAV | Rotary wing | Magnetic data | Regional scale | Autonomous |
| Parvar et al. [52] | 2017 | Presenting a result of performing a UAV magnetometry survey | Rotary wing | Magnetic data | Regional scale | Unknown |
| Cunningham et al. [53] | 2018 | Evaluating the capabilities of UASs against traditional magnetic surveying systems and methods | Both | Magnetic data | Mine scale | Unknown |
| Parshin et al. [54] | 2018 | Development of UAS that can perform gamma survey and comparison of ground-based and UAS-based gamma survey results | Rotary wing | Magnetic data | Regional scale | Autonomous |
| Li et al. [55] | 2014 | Proposal and performance test of UAV system capable of measuring magnetic force and radiation | Fixed wing | Magnetic data Radiation data | Regional scale | Autonomous |
| Reference | Year | Aim of Study | UAV Type | Acquisition Data Type | Target Area Scale | Flying Control Style |
|---|---|---|---|---|---|---|
| Wang et al. [56] | 2014 | Accuracy analysis of 3-D geometry generated from low-attitude UAV images | Rotary wing | Digital camera image | Zonal scale | Manual |
| Cho et al. [57] | 2015 | Verification of on-site applicability of aerial triangulation using UAV images | Rotary wing | Digital camera image | Mine scale | Unknown |
| Lee and Choi [58] | 2015 | Topographic survey of open-pit mine using a Rotary-wing UAV | Rotary wing | Digital camera image | Mine scale | Autonomous |
| Lee and Choi [59] | 2015 | Topographic survey of open-pit mine using a Fixed-wing UAV | Fixed wing | Digital camera image | Mine scale | Semi-autonomous |
| Lee and Choi [60] | 2016 | Comparison of aerial photogrammetry using rotary- and fixed-wing UAV | Both | Digital camera image | Mine scale | Semi-autonomous |
| Chen et al. [61] | 2015 | Investigation of characteristics of open-pit mines using topographic maps and landscape metrics | Fixed wing | Digital camera image | Mine scale | Autonomous |
| Rossi et al. [63] | 2017 | Proposal methodology for reconstructing the topography using nadir and oblique imagery | Rotary wing | Digital camera image | Mine scale | Autonomous |
| Chirico and DeWitt [64] | 2017 | Evaluation of high-resolution orthoimage and DSM obtained from UAS and SfM photogrammetry | Rotary wing | Digital camera image | Mine scale | Unknown |
| Gil and Frąckiewicz [65] | 2019 | Optimizing the location of observation network points in an open-pit mine using aerial photograph | Rotary wing | Digital camera image | Mine scale | Unknown |
| Tscharf et al. [66] | 2015 | Suggestion of workflow for image-based reconstruction that can create detailed 3-D models | Both | Digital camera image | Zonal scale | Unknown |
| Xiang et al. [67] | 2018 | Generation of DEMs and analysis of mine surface through the UAV photogrammetry | Fixed wing | Digital camera image | Mine scale | Autonomous |
| Beretta et al. [68] | 2018 | Uncertainty evaluation of digital surface models obtainable through UAV photogrammetry | Rotary wing | Digital camera image | Mine scale | Unknown |
| Kršák et al. [69] | 2016 | Accuracy evaluation of UAV-based digital elevation model (DEM) | Rotary wing | Digital camera image | Mine scale | Unknown |
| Ge et al. [70] | 2016 | Volume evaluation, monitoring the safety of slopes, and mapping the underground mine using UAV | Fixed wing | Digital camera image | Zonal scale | Unknown |
| Esposito et al. [71] | 2017 | Quantification of mined volume, evaluation of surface changes using UAV-based photogrammetry | Both | Digital camera image | Mine scale | Autonomous |
| Reference | Year | Aim of Study | UAV Type | Acquisition Data Type | Target Area Scale | Flying Control Style |
|---|---|---|---|---|---|---|
| McLeod [72] | 2012 | Presenting the possibility to create a 3-D point clouds from video images acquired with UAV | Rotary wing | Digital camera image | Zonal scale | Unknown |
| McLeod et al. [73] | 2013 | Rotary wing | Digital camera image | Zonal scale | Unknown | |
| Vrublová et al. [74] | 2015 | Application of UAV-based digital terrestrial photogrammetry to landslides | Fixed wing | Digital camera image | Zonal scale | Autonomous |
| Blistan et al. [75] | 2016 | Proposal of UAV’s usefulness in investigating outcrops of geological rocks | Rotary wing | Digital camera image | Zonal scale | Autonomous |
| Beretta et al. [76] | 2019 | Classification of rock on the slope of using aerial photogrammetry and machine learning | Rotary wing | Digital camera image | Zonal scale | Unknown |
| Katuruza and Birch [77] | 2019 | Opencast highwall mapping using UAV technology | Rotary wing | Digital camera image | Zonal scale | Unknown |
| Stead et al. [78] | 2019 | Review of application of field and remote sensing approaches for rock slope characteristics | Rotary wing | Digital camera image | Zonal scale | Unknown |
| Reference | Year | Aim of Study | UAV Type | Acquisition Data Type | Target Area Scale | Flying Control Style |
|---|---|---|---|---|---|---|
| Alvarado et al. [79] | 2015 | Development of a methodology to characterize the blasting plumes in near-real time | Both | Dust data | Regional scale | Semi-autonomous |
| Bamford et al. [80] | 2017 | Suggestions for measuring rock fragmentation using UAVs | Rotary wing | Digital camera image | Zonal scale | Autonomous |
| Bamford et al. [81] | 2017 | Evaluation of applicability of UAV using artificial lighting to measure rock fragmentation | Rotary wing | Digital camera image | Zonal scale | Autonomous |
| Motepe [82] | 2013 | Proposal of a UAV system capable of conducting search and rescue missions at a mine’s accident site | Rotary wing | Digital camera image | Mine scale | Manual |
| Péter et al. [83] | 2016 | Analysis of the usefulness of drones for rescue from the perspective of an open-pit mine disaster | Rotary wing | - | Mine scale | Autonomous |
| Ranjan et al. [84] | 2018 | Proposal of UAV based multihop emergency communication system | Unknown | Communication data | Mine scale | Autonomous |
| Reference | Year | Aim of Study | UAV Type | Acquisition Data Type | Target Area Scale | Flying Control Style |
|---|---|---|---|---|---|---|
| Kanellakis and Nikolakopoulos [86] | 2016 | Assessment of technology for visual localization systems for underground mining | Rotary wing | Distance data | Mine scale | Autonomous |
| Freire and Cota [87] | 2017 | UAV design for imaging in areas inaccessible to underground mine due to mining and blasting | Rotary wing | Digital camera image | Zonal scale | Unknown |
| Raj [88] | 2019 | Proposal of drone-based monitoring system that can be used in underground mines | Rotary wing | Digital camera image | Zonal scale | Semi-autonomous |
| Turner et al. [85] | 2018 | Creation of 3-D model of underground mine using FLIR (forward looking infrared) image | Rotary wing | Thermal image | Zonal scale | Unknown |
| Turner et al. [89] | 2020 | Proposal of a method to detect and quantify geological discontinuities using thermal and multispectral images | Rotary wing | Thermal image Multispectral image | Zonal scale | Semi-autonomous |
| Mitchell and Marshall [90] | 2017 | Prototype development of UAV for underground mining scanning | Rotary wing | Digital camera image | Mine scale | Autonomous |
| Azhari et al. [91] | 2017 | Generation of 3-D models of underground UAV operating environments using SONAR data | Rotary wing | IMU data SONAR data | Mine scale | Unknown |
| Reference | Year | Aim of Study | UAV Type | Acquisition Data Type | Target Area Scale | Flying Control Style |
|---|---|---|---|---|---|---|
| Martin et al. [92] | 2015 | Mapping the gamma radiation using UAV attached a lightweight gamma-ray spectrometer | Rotary wing | Gamma spectrum data | Regional scale | Autonomous |
| Fang et al. [93] | 2019 | Mapping of Fe concentration in soil using hyperspectral image and regression analysis | Unknown | Hyperspectral image | Zonal scale | Unknown |
| Jackisch et al. [94] | 2018 | Investigation of pyrite and its consecutive weathering products in mining waste using drones | Both | Hyperspectral image | Zonal scale | Autonomous |
| Castendyk et al. [95] | 2019 | Selection of the optimal water sampling depth according to the temperature and specific conductance of the pit lake | Rotary wing | Water temperature data Water sample | Zonal scale | Unknown |
| Reference | Year | Aim of Study | UAV Type | Acquisition Data Type | Target Area Scale | Flying Control Style |
|---|---|---|---|---|---|---|
| Lee et al. [96] | 2016 | Analysis and monitoring of changes in the ecological restoration area using UAS-based photogrammetry | Rotary wing | Digital camera image | Mine scale | Unknown |
| Urban et al. [97] | 2018 | Comparison of aerial survey results obtained with two different UAVs | Fixed wing | Digital camera image | Regional scale | Autonomous |
| Moudrý et al. [98] | 2019 | Creation of DTM related to vegetation cover and evaluation of UAV system performance | Fixed wing | Digital camera image | Mine scale | Autonomous |
| Moudrý et al. [99] | 2019 | Evaluation of point clouds derived by aerial photogrammetry LiDAR | Fixed wing | Digital camera image | Regional scale | Autonomous |
| Padró et al. [100] | 2019 | Monitoring of mine restorations using UAS images | Rotary wing | Multispectral image | Mine scale | Unknown |
| Strohbach et al. [101] | 2018 | Investigation of the extent of vegetation establishment using near infra-red aerial images | Fixed wing | Multispectral image | Zonal scale | Autonomous |
| Reference | Year | Aim of Study | UAV Type | Acquisition Data Type | Target Area Scale | Flying Control Style |
|---|---|---|---|---|---|---|
| Suh and Choi [102] | 2017 | Generation of subsidence inventory map using UAV photogrammetry technology | Rotary wing | Digital camera image | Regional scale | Autonomous |
| Rauhala et al. [103] | 2017 | Monitoring of potential subsidence of tailings | Fixed wing | Digital camera image | Zonal scale | Unknown |
| Dawei et al. [104] | 2020 | Monitoring of surface dynamic subsidence basin caused by underground mining | Fixed wing | Digital camera image | Zonal scale | Unknown |
| Type | Fixed Wing | Rotary Wing | Both | Sum |
|---|---|---|---|---|
| Exploration | 1 | 10 | 6 | 17 |
| Exploitation | 5 | 25 | 4 | 34 |
| Reclamation | 6 | 5 | 1 | 12 |
| Sum | 12 | 40 | 11 | 63 |
| Phase | Exploration | Exploitation | Reclamation | Sum |
|---|---|---|---|---|
| Image or video from digital camera | 3 | 28 | 7 | 38 |
| Multi- and hyperspectral, thermal image or data | 6 | 3 | 4 | 13 |
| Geophysics data | 13 | 0 | 1 | 14 |
| Environmental monitoring data 1 | 0 | 1 | 1 | 2 |
| Distance measuring data | 0 | 2 | 0 | 2 |
| Etc. 2 | 0 | 2 | 1 | 3 |
| Sum | 22 | 36 | 14 | 72 |
| Style | Manual | Autonomous | Semi-Autonomous | Sum |
|---|---|---|---|---|
| Exploration | 0 | 8 | 3 | 11 |
| Exploitation | 2 | 13 | 5 | 20 |
| Reclamation | 0 | 7 | 0 | 7 |
| Sum | 2 | 28 | 8 | 38 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, S.; Choi, Y. Applications of Unmanned Aerial Vehicles in Mining from Exploration to Reclamation: A Review. Minerals 2020, 10, 663. https://doi.org/10.3390/min10080663
Park S, Choi Y. Applications of Unmanned Aerial Vehicles in Mining from Exploration to Reclamation: A Review. Minerals. 2020; 10(8):663. https://doi.org/10.3390/min10080663
Chicago/Turabian StylePark, Sebeom, and Yosoon Choi. 2020. "Applications of Unmanned Aerial Vehicles in Mining from Exploration to Reclamation: A Review" Minerals 10, no. 8: 663. https://doi.org/10.3390/min10080663
APA StylePark, S., & Choi, Y. (2020). Applications of Unmanned Aerial Vehicles in Mining from Exploration to Reclamation: A Review. Minerals, 10(8), 663. https://doi.org/10.3390/min10080663