
A Time-Frequency Domain Underdetermined Blind Source Separation Algorithm for MIMO Radar Signals


Abstract
:1. Introduction
2. Problem Formulation
3. Mixing Matrix Estimation
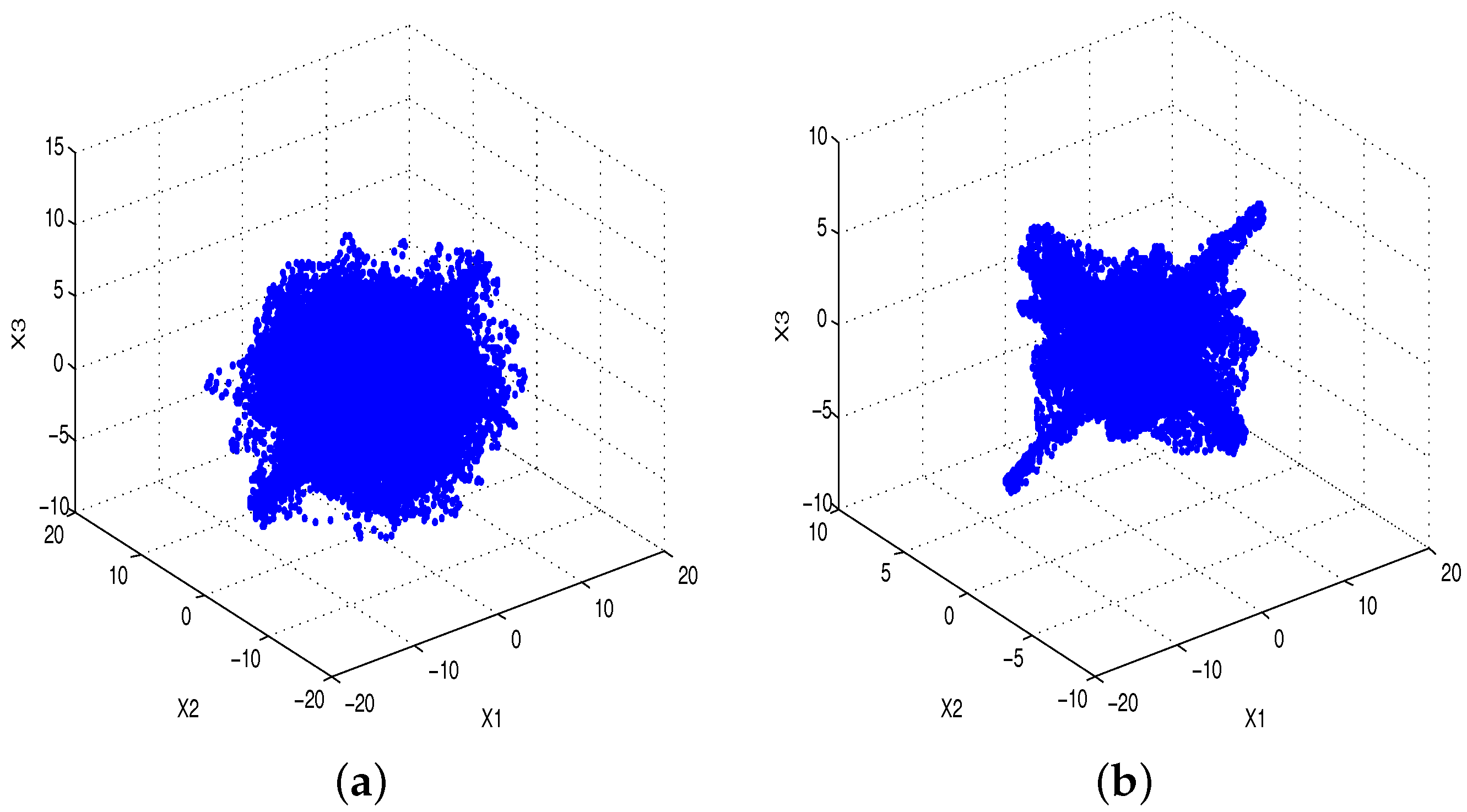
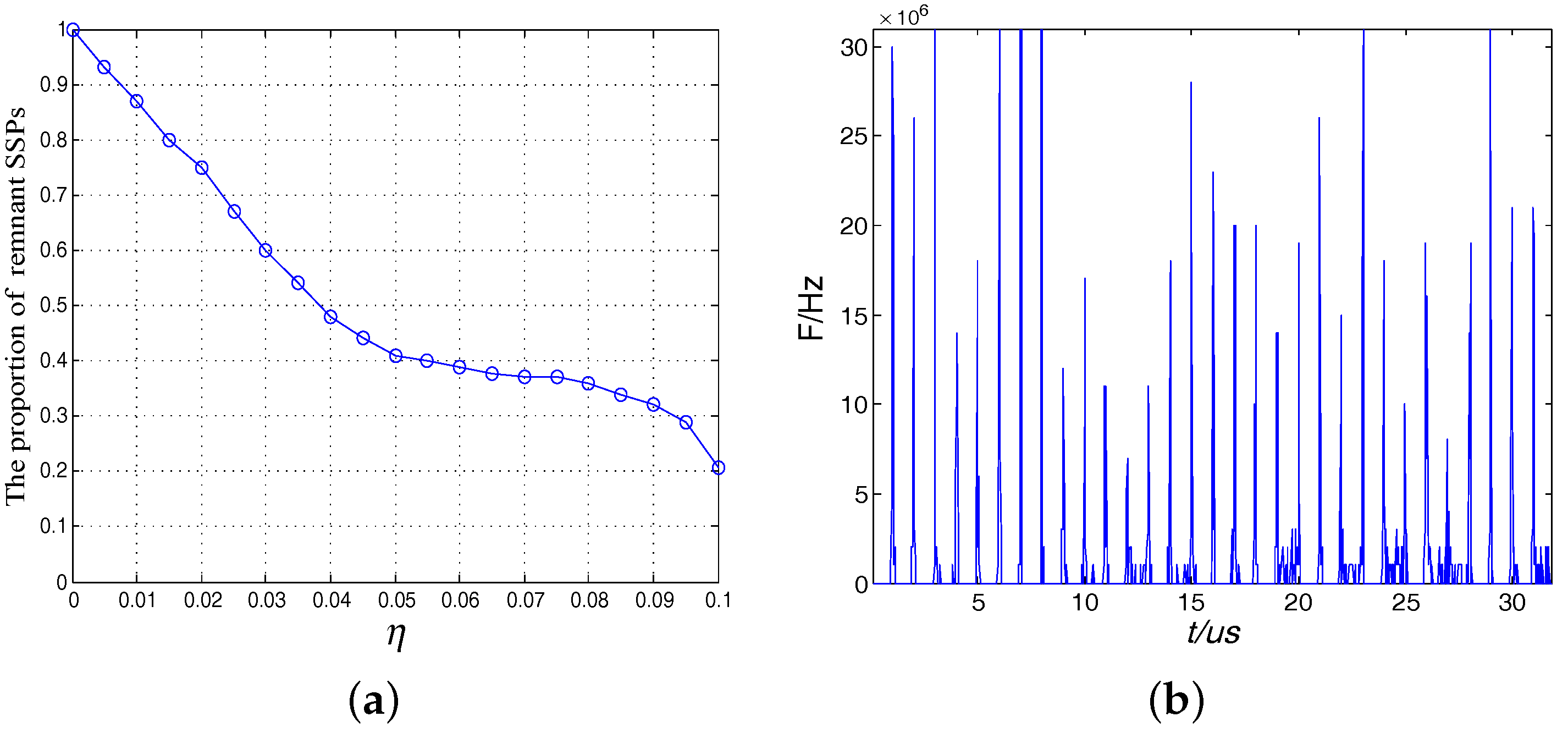
3.1. Noise Preprocessing
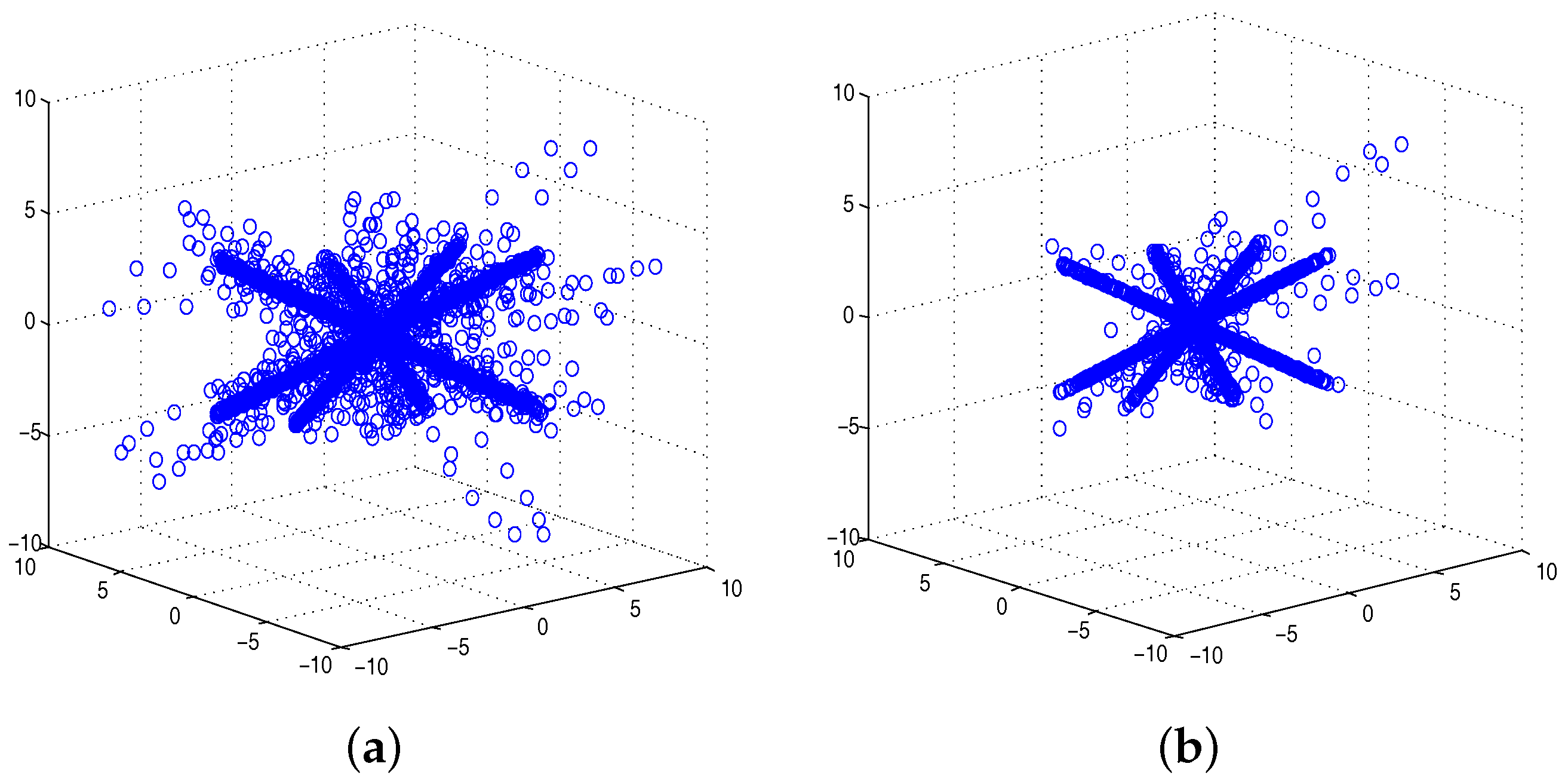
3.2. Mixing Matrix Estimation Based on Single Source Points
4. Sources Recovery Algorithm
4.1. The Introduction of the Smoothed Norm
4.2. Time-Frequency-Smoothed Norm Algorithm
- (1)
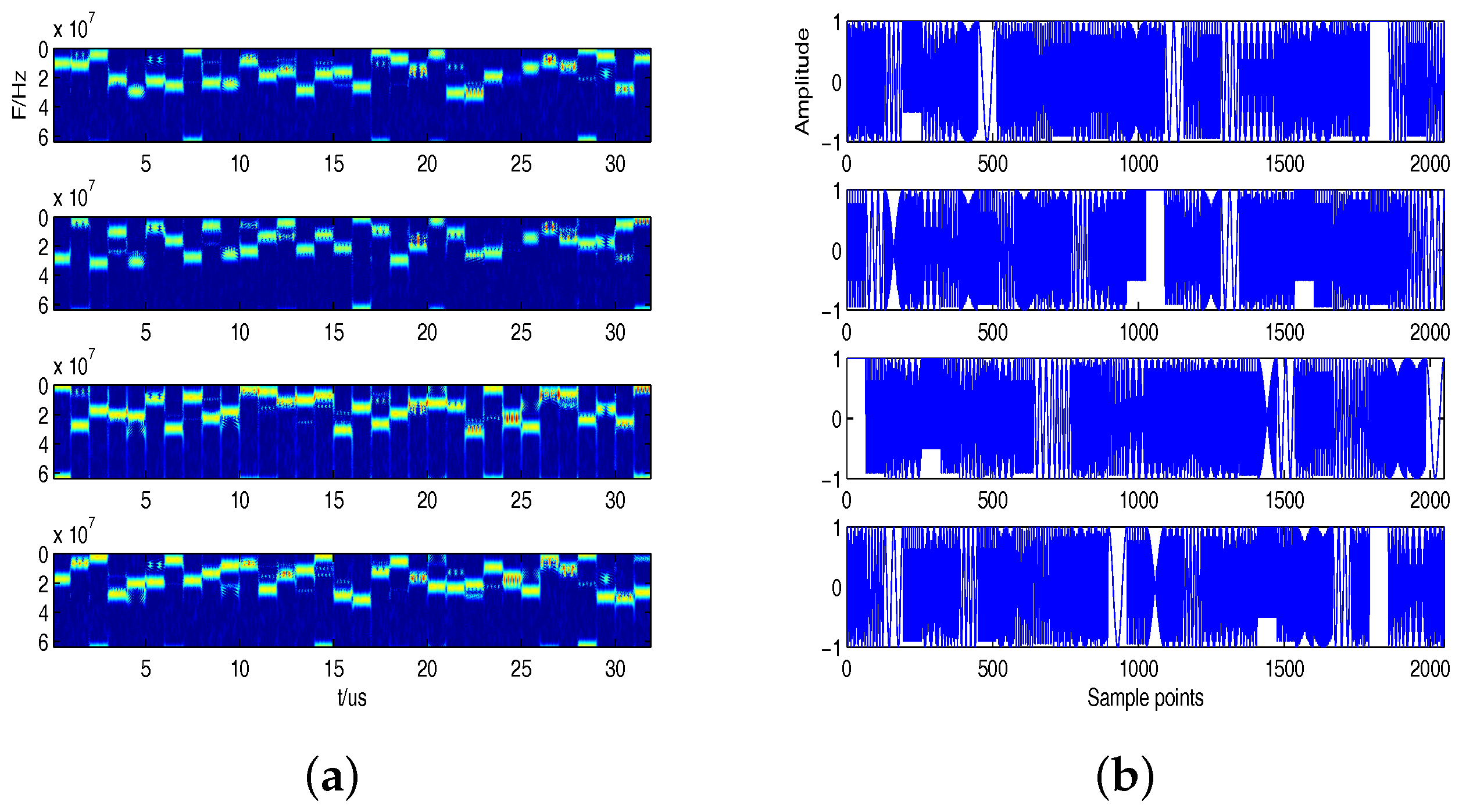
- Applying STFT on both sides of Equation (3), then we get .
- (2)
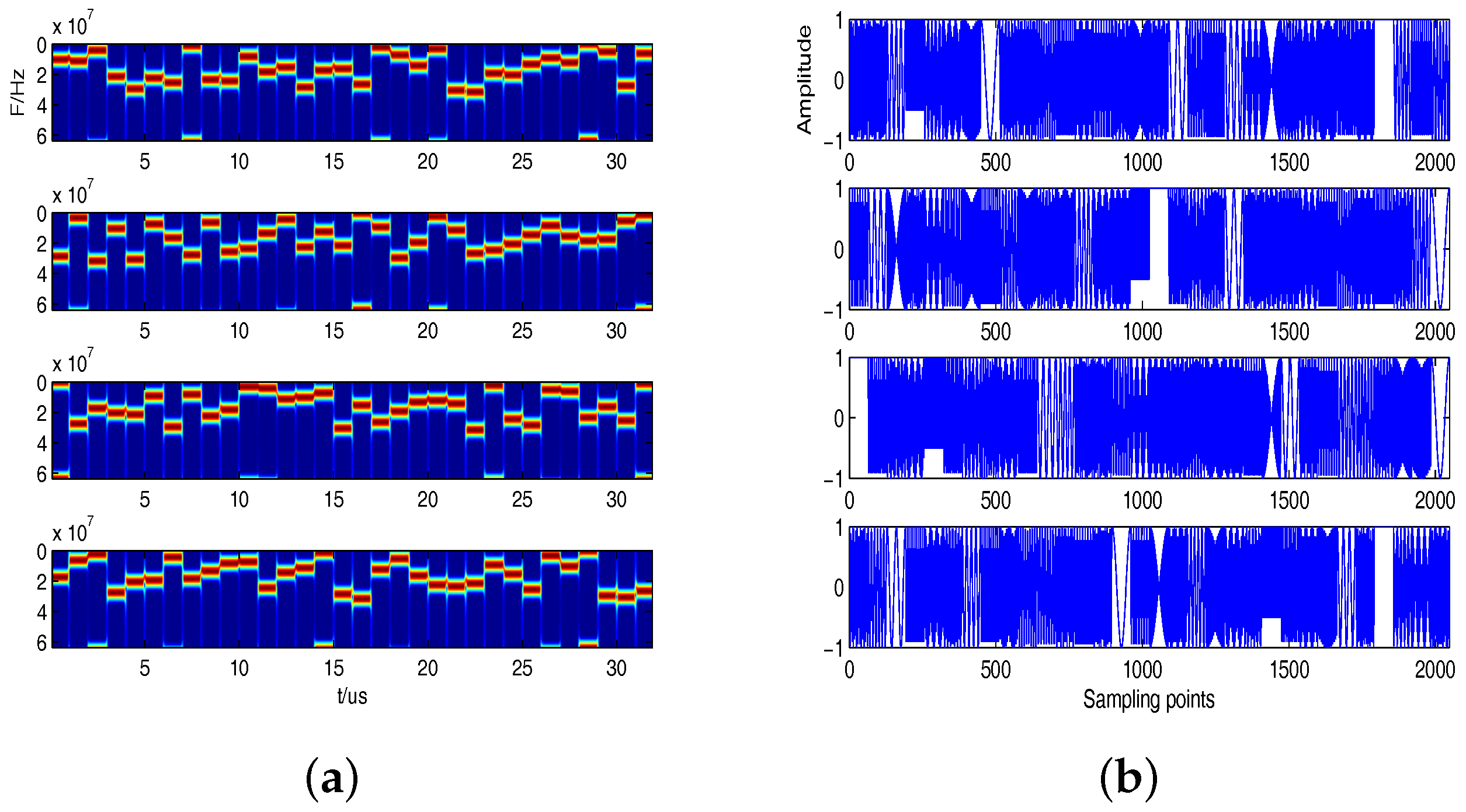
- For the observed signal , the SL0 algorithm is utilized to preliminarily reconstruct the TF information of sources in the TF domain.
- (3)
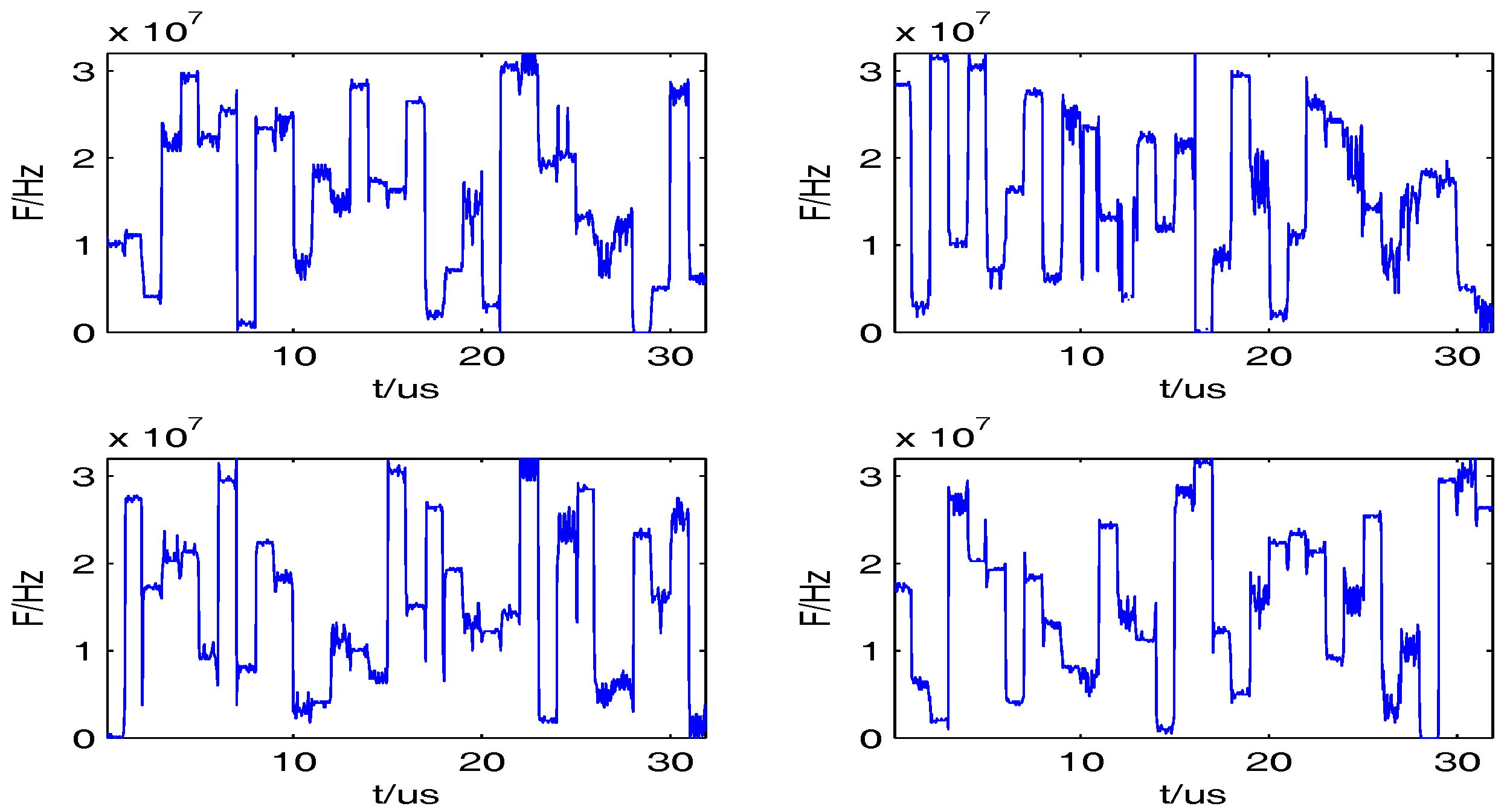
- For the reconstructed n- source , the TF ridge is obtained by extracting the maximum frequency elements at each time point in the TF domain. In essence, is the TF coordinate values of the peak sequences, where time is the abscissa axis and peak frequency is the ordinate axis.
- (4)
- The median filter is selected to smooth processing for TF ridge and then get . In theory, each step of the TF ridge is flat. However, the interference of Gaussian noise in the environment leads to the impulse-noise while searching the optimal solution. Median filter has a good filtering effect on the impulse-noise, especially when the noise is filtered out, and it can protect the edges of the ridge instead of being blurred.
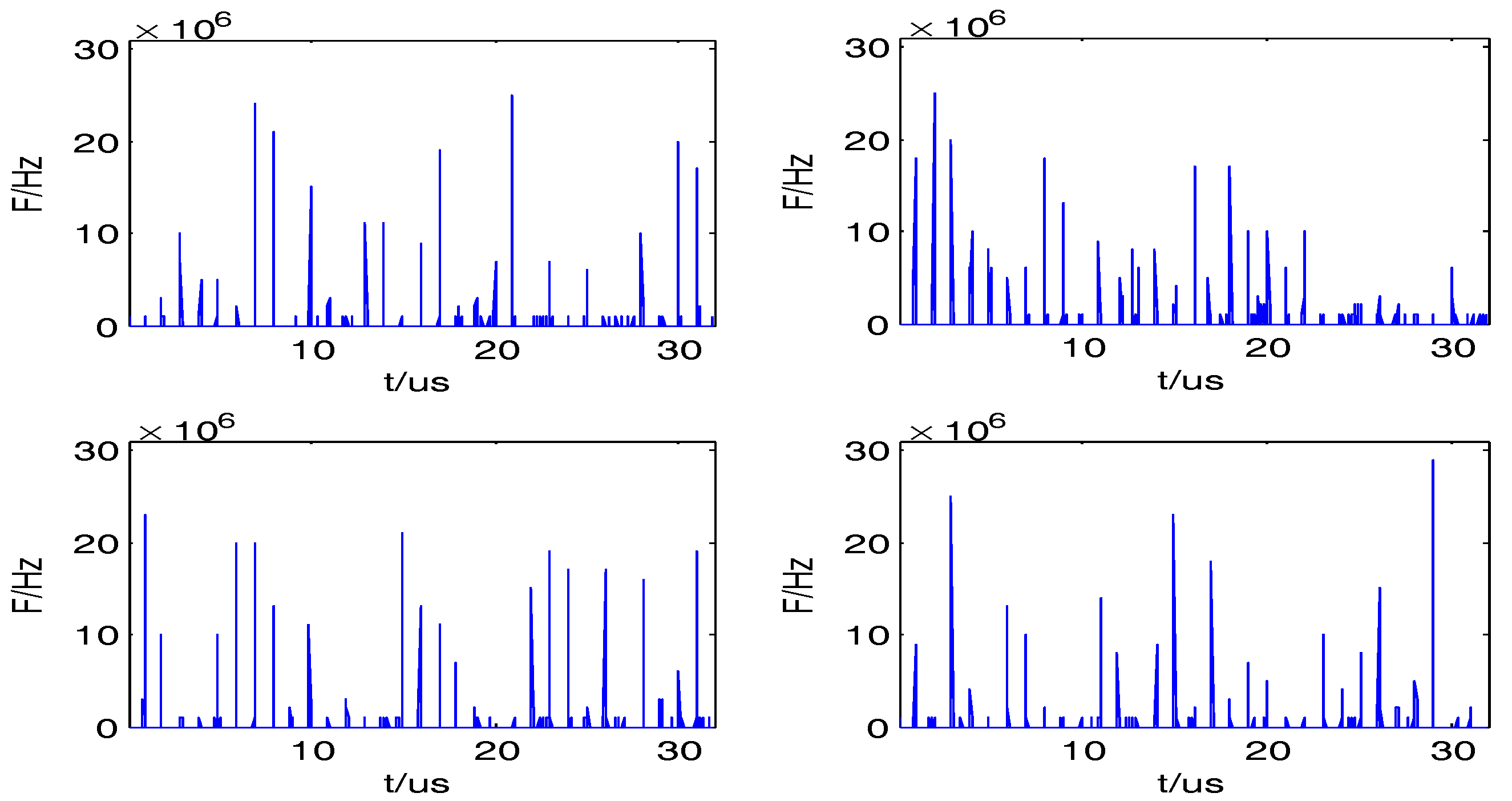
- (5)
- Taking the difference of the smoothed , we then get . Set the threshold , when the is numerically larger than , and its corresponding times are regarded as the jumping-times. The period of coding can be obtained by using statistically averaging of the differences of the jumping-times.
- (6)
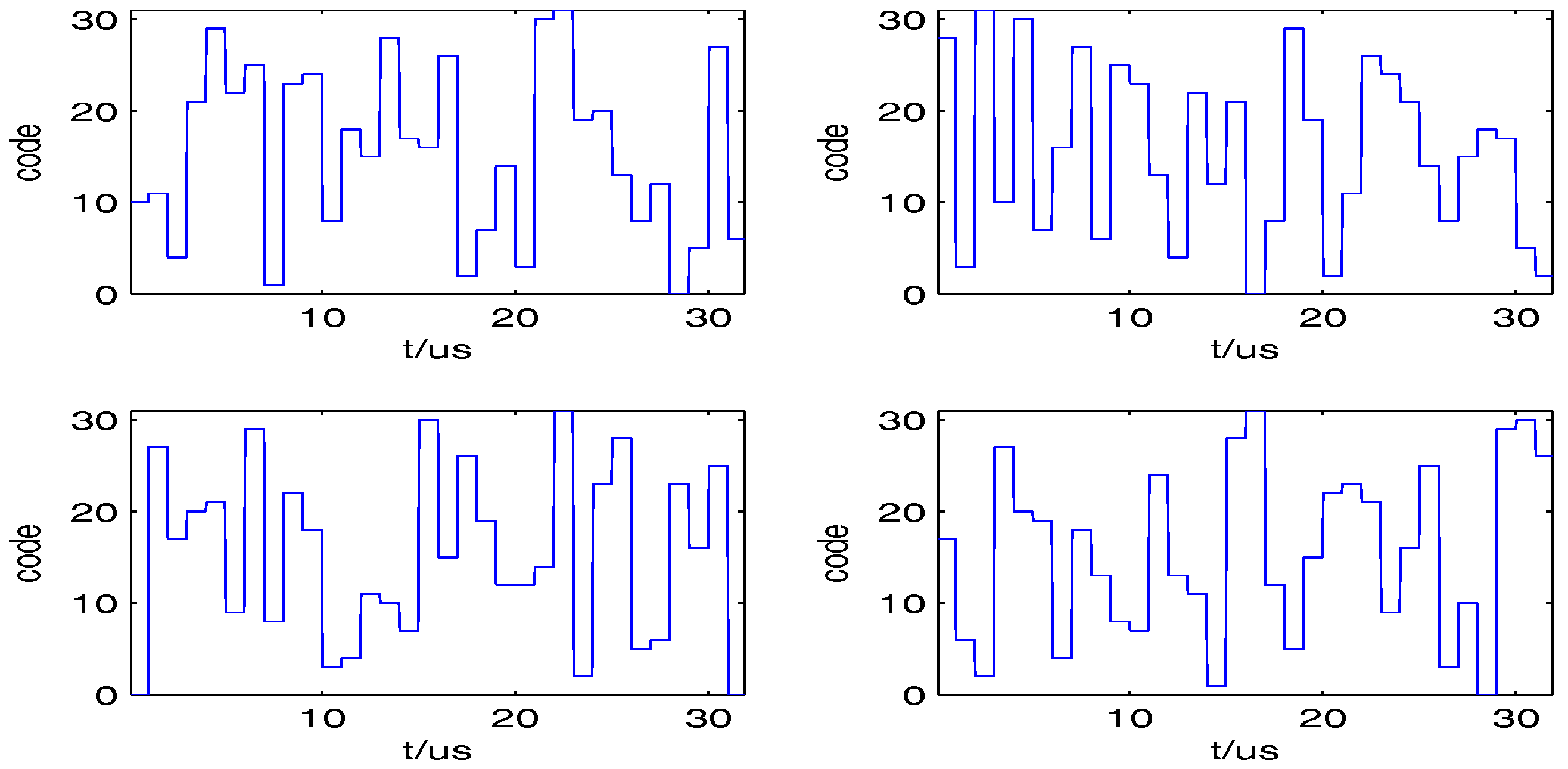
- From Equation (2), we can know that the frequency of each step is the product of coding frequency and . . Assuming that is the estimated coding frequency, so = . Meanwhile, it can be seen that the coding frequency is an integer sequence. Therefore, the integer part of the is kept to make approximations.
- (7)
- Estimate coding frequency in each coding period. In theory, remains constant during a coding period; however, due to the effect of noise and errors caused by the approximations of process (6), may appear to fluctuate. Therefore, take out the coded values with the most time steps within each coding period as the estimated coding frequency.
- (8)
5. Simulation Results and Analysis
5.1. Algorithm Performance Evaluation Criteria
5.2. Parameter Setting
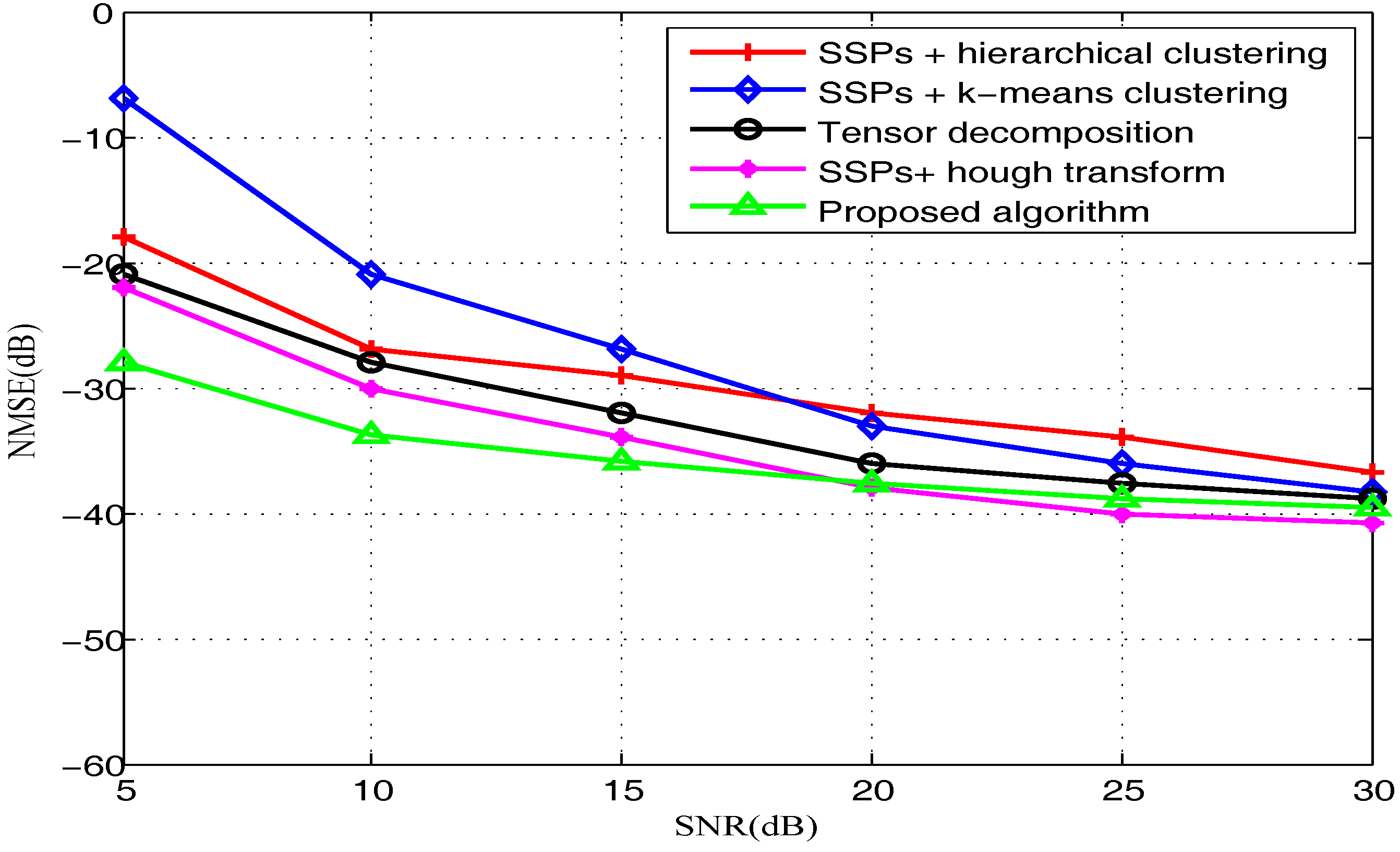
5.3. Experiment 1 and Analysis
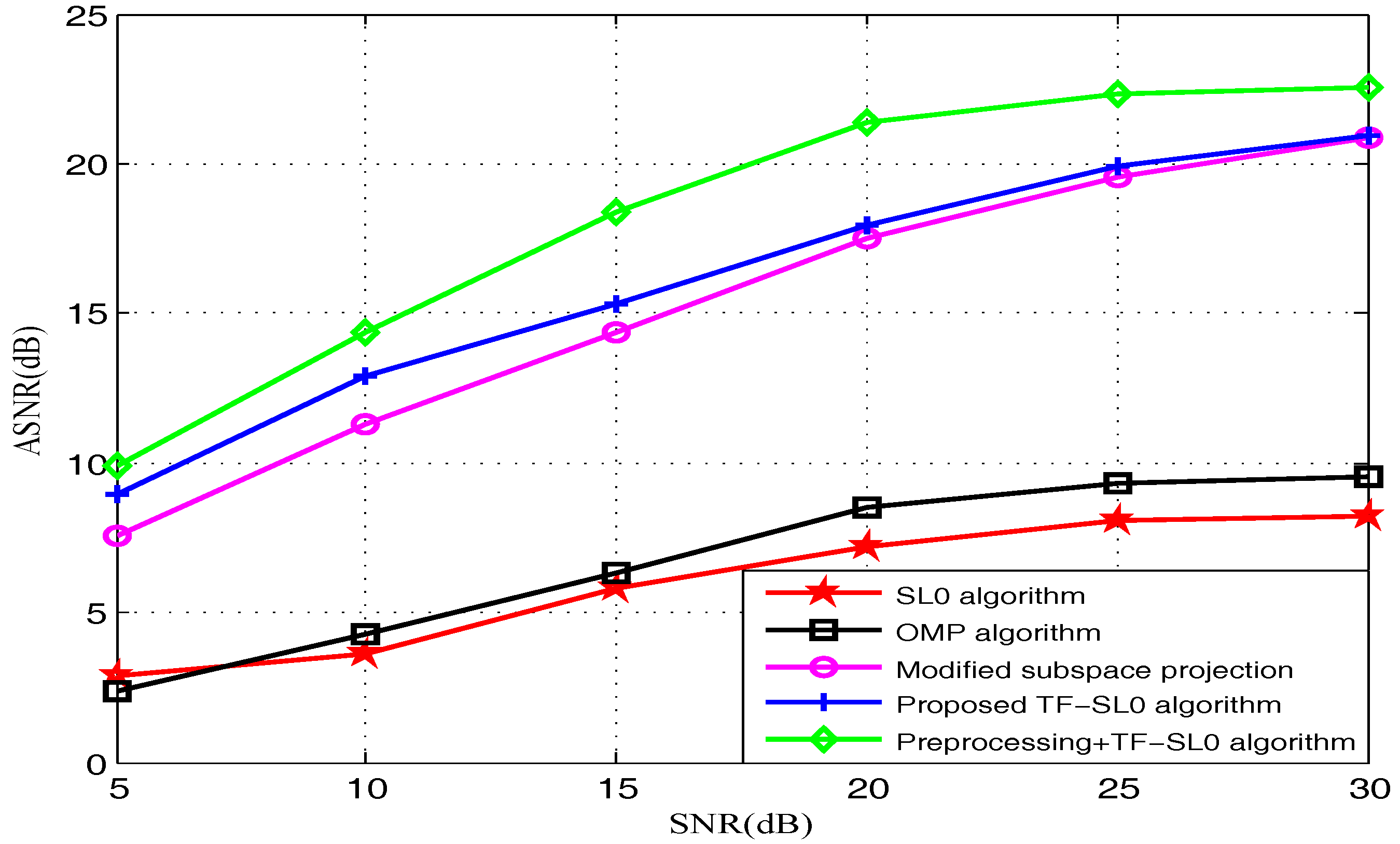
5.4. Experiment 2 and Analysis
5.5. Experiment 3 and Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhang, H.; Wang, G.; Cai, P.; Wu, Z.; Ding, S. A fast blind source separation algorithm based on the temporal structure of signals. Neurocomputing 2014, 139, 261–271. [Google Scholar] [CrossRef]
- Tang, G.; Luo, G.G.; Zhang, W.H. Underdetermined Blind Source Separation with Variational Mode Decomposition for Compound Roller Bearing Fault Signals. Sensors 2016, 16, 897. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Nie, W.; Ye, F.; Lin, Y. A Mixing Matrix Estimation Algorithm for Underdetermined Blind Source Separation. Circuits Syst. Signal Process. 2016, 35, 3367–3379. [Google Scholar] [CrossRef]
- Bofill, P.; Zibulevsky, M. Underdetermined blind source separation using sparse representations. Signal Process. 2001, 81, 2353–2362. [Google Scholar] [CrossRef]
- Jourjine, A.; Rickard, S. Blind separation of disjoint orthogonal signals: Demixing N sources from 2 mixtures. Acoust. Speech Signal Process. ICASSP 2000, 5, 2985–2988. [Google Scholar]
- Yilmaz, O.; Rickard, S. Blind separation of speech mixture via time-frequency masking. IEEE Trans. Signal Process. 2004, 52, 1830–1847. [Google Scholar] [CrossRef]
- Reju, V.G.; Koh, S.N.; Soon, I.Y. An algorithm for mixing matrix estimation in instantaneous blind source separation. Signal Process. 2009, 89, 1762–1773. [Google Scholar] [CrossRef]
- Kim, S.G.; Yoo, C.D. Underdetermined blind source separation based on subspace representation. IEEE Trans. Signal Process. 2009, 57, 2604–2614. [Google Scholar]
- Sun, J.; Li, Y.; Wen, J.; Yan, S. Novel mixing matrix estimation approach in underdetermined blind source separation. Neurocomputing 2016, 173, 623–632. [Google Scholar] [CrossRef]
- Mallat, S.G.; Zhang, Z. Matching pursuits with time-frequency dictionaries. IEEE Trans. Signal Process. 1993, 41, 3397–3415. [Google Scholar] [CrossRef]
- Chen, S.; Billings, S.A.; Luo, W. Orthogonal least squares methods and their application to non-linear system identification. Int. J. Control 1989, 50, 1873–1896. [Google Scholar] [CrossRef]
- Pati, Y.C.; Rezaiifar, R.; Krishnaprasad, P.S. Orthogonal matching pursuit: Recursive function approximation with applications to wavelet decomposition. In Proceedings of the Conference Record of the 27th Asilomar Conference on Signals Systems and Compute, Pacific Grove, CA, USA, 1–3 November 1993; Volume 1, pp. 40–44. [Google Scholar]
- Chen, S.S.; Donoho, D.L.; Saunders, M.A. Atomic decomposition by basis pursuit. SIAM Rev. 2001, 43, 129–159. [Google Scholar] [CrossRef]
- Zibulevsky, M.; Pearlmutter, B.A. Blind source separation by sparse decomposition in a signal dictionary. Neural Comput. 2001, 13, 863–882. [Google Scholar] [CrossRef] [PubMed]
- Donoho, D.L.; Elad, M. Maximal sparsity representation via l1 minimization. Proc. Natl. Acad. Sci. USA 2003, 100, 2197–2202. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.Q.; Cichocki, A.; Amari, S.I. Analysis of sparse representation and blind source separation. Neural Comput. 2004, 16, 1193–1234. [Google Scholar] [CrossRef] [PubMed]
- Zayyani, H.; Babaie, Z.M.; Jutten, C. An iterative Bayesian algorithm for sparse component analysis in presence of noise. IEEE Trans. Signal Process. 2009, 57, 4378–4390. [Google Scholar] [CrossRef]
- Mohimani, H.; Babaie, Z.M.; Jutten, C. A fast approach for overcomplete sparse decomposition based on smoothed l0 norm. IEEE Trans. Signal Process. 2009, 57, 289–301. [Google Scholar] [CrossRef]
- Amishima, T.; Okamura, A.; Morita, S.; Kirimoto, T. Permutation method for ICA separated source signal blocks in time domain. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 899–904. [Google Scholar] [CrossRef]
- Feger, R.; Pfeffer, C.; Stelzer, A. A frequency-division MIMO FMCW radar system based on Delta–Sigma modulated transmitters. IEEE Trans. Microw. Theory Tech. 2014, 62, 3572–3581. [Google Scholar] [CrossRef]
- Ma, J.; Huang, G.; Zhou, D.; Fang, B.; Yu, H. Underdetermined blind sorting of radar signals based on sparse component analysis. In Proceedings of the IEEE International Conference on Communication Technology, Chengdu, China, 9–11 November 2012; pp. 1296–1300. [Google Scholar]
- Fang, B.; Huang, G.; Gao, J. Underdetermined blind source separation for LFM radar signal based on compressive sensing. In Proceedings of the 2013 25th Chinese Control and Decision Conference, Guiyang, China, 25–27 May 2013; pp. 1878–1882. [Google Scholar]
- Ai, X.F.; Luo, Y.; Zhao, G.Q. Underdetermined blind separation of radar signals based on tensor decomposition. Syst. Eng. Electron. 2016, 38, 2505–2509. [Google Scholar]
- Liu, B.; He, Z. Comments on discrete frequency-coding waveform design for netted radar systems. IEEE Signal Process. Lett. 2008, 15, 449–451. [Google Scholar] [CrossRef]
- Xu, R.; Wunsch, D. Survey of clustering algorithms. IEEE Trans. Neural Netw. 2005, 16, 645–678. [Google Scholar] [CrossRef] [PubMed]
- Rivet, B.; Vigneron, V.; Paraschiv-Ionescu, A.; Jutten, C. Wavelet de-noising for blind source separation in noisy mixtures. In Independent Component Analysis and Blind Signal Separation; Lecture Notes in Computer Science; Springer: Berlin, Germany, 2004; Volume 3195, pp. 263–270. [Google Scholar]
- Liu, B. Orthogonal discrete frequency-coding waveform set design with minimized autocorrelation sidelobes. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1650–1657. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR | 5 dB | 10 dB | 15 dB | 20 dB | 25 dB | 30 dB |
|---|---|---|---|---|---|---|
| 0.02 | 0.035 | 0.045 | 0.05 | 0.052 | 0.055 | |
| () | 6.5 | 6.2 | 5.8 | 5.0 | 5.0 | 5.0 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Q.; Ruan, G.; Liao, Y. A Time-Frequency Domain Underdetermined Blind Source Separation Algorithm for MIMO Radar Signals. Symmetry 2017, 9, 104. https://doi.org/10.3390/sym9070104
Guo Q, Ruan G, Liao Y. A Time-Frequency Domain Underdetermined Blind Source Separation Algorithm for MIMO Radar Signals. Symmetry. 2017; 9(7):104. https://doi.org/10.3390/sym9070104
Chicago/Turabian StyleGuo, Qiang, Guoqing Ruan, and Yanping Liao. 2017. "A Time-Frequency Domain Underdetermined Blind Source Separation Algorithm for MIMO Radar Signals" Symmetry 9, no. 7: 104. https://doi.org/10.3390/sym9070104
APA StyleGuo, Q., Ruan, G., & Liao, Y. (2017). A Time-Frequency Domain Underdetermined Blind Source Separation Algorithm for MIMO Radar Signals. Symmetry, 9(7), 104. https://doi.org/10.3390/sym9070104