1. Introduction
A block matrix is a matrix which is partitioned into submatrices, called
blocks, such that the subscripts of the blocks are defined in the same fashion as those for the elements of a matrix [
1].
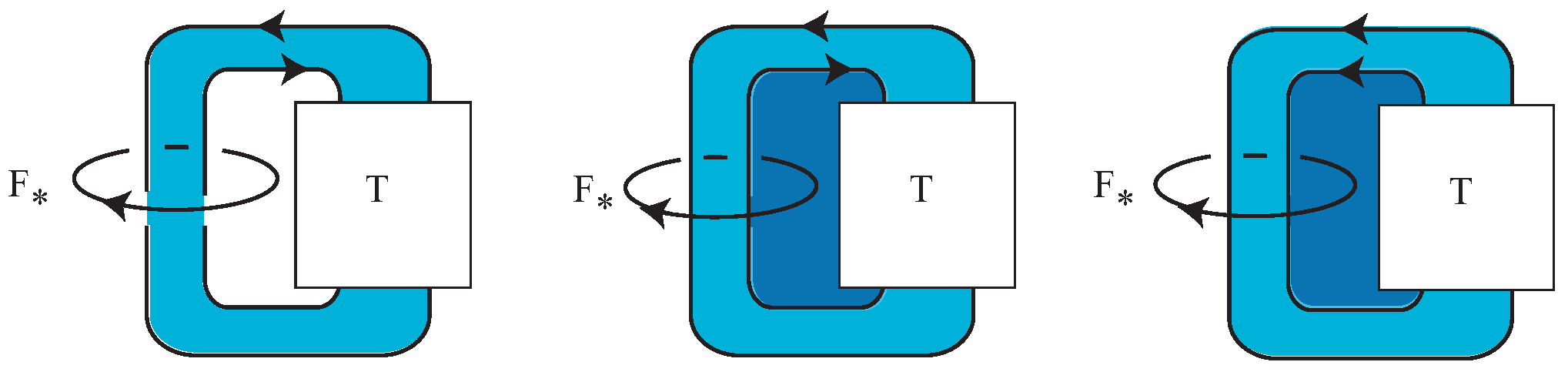
Let us consider periodic subject that consists of finite number of units with the same properties, see
Figure 1. There are 5 subjects with the same properties which are arranged periodically. The brown color is used to depict their periodical placement, while the green color in the second and third figure presents an extra relationship which is acting between neighbouring two subjects.
The matrix encoding the properties of the whole subject can be presented by block matrices. In the first picture in
Figure 1, there are a finite number of units which are placed periodically but there are no interaction between units as seen. The matrix for the periodic subject will be of the form
Indeed, the determinant of the matrix is .
In the second picture in
Figure 1, there are a finite number of units which are placed periodically and each unit is affected by neighbouring units as seen. The matrix for such a periodic subject is of the form
In [
2], the authors showed that the determinant of such a matrix is given by
, where
D is an
matrix.
On the other hand, in the last picture in
Figure 1, there are a finite number of units which are placed periodically and each unit is affected by the periodic structure itself (rather than neighbouring units). The matrix for such a periodic object can be presented by a matrix of the form
or a matrix of the form
The applications in the last section will be helpful to understand the difference between (
3) and (
4).
In this paper, we will show that the determinant of the matrix (
3) is
while the determinant of the matrix (
4) is
As an application, we will find the Alexander polynomial and the determinant of a periodic link (Theorems 4–7). Notice that, if a matrix M is singular, then we define .
3. Application: Alexander Polynomials and the Determinants of Periodic Links
We start this section by reviewing results of knot theory which are related with the calculation of the Alexander polynomial and the determinant of a link, see [
2,
3,
4] in detail.
A
knot K is an embedding
of
into the 3-space
. A
link is a finite disjoint union of knots:
. Each knot
is called a
component of the link
L. Two links
L and
are
equivalent (or
ambient isotopic) if one can be transformed into the other via a deformation of
upon itself. A
diagram of a link
L is a regular projection image
from the link
L into
such that the over-path and the under-path at each double points of
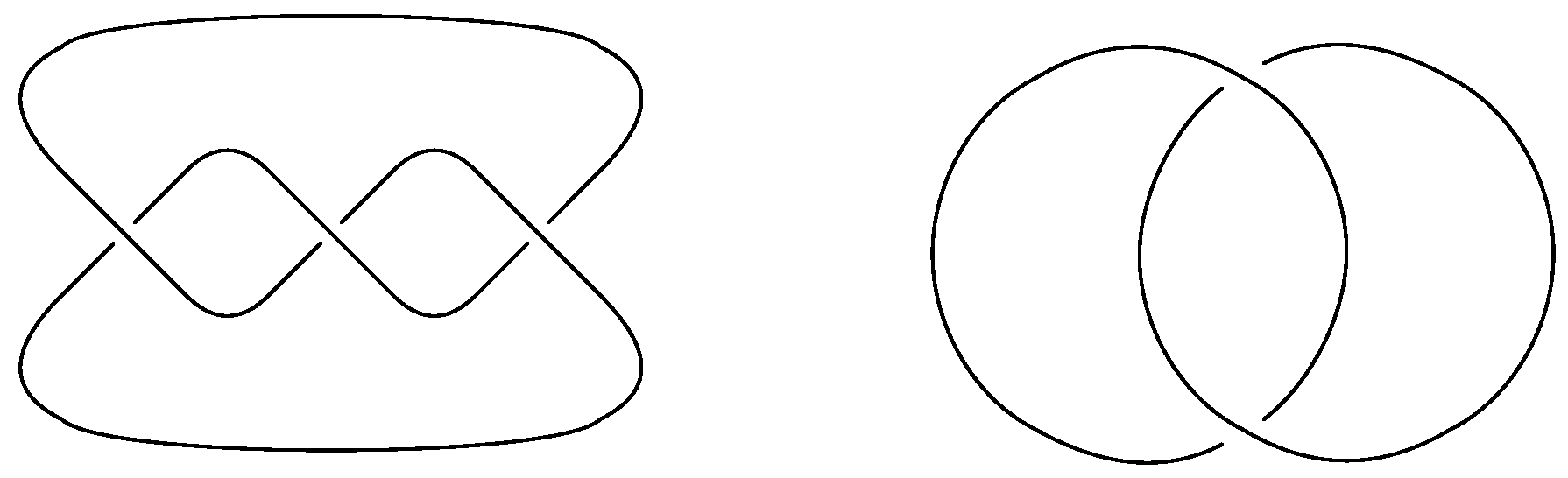
are distinguished. There are examples of a knot and a link in
Figure 2. Two link diagrams are
equivalent if one can be transformed into another by a finite sequence of Reidemeister moves in
Figure 3.
A Seifert surface for an oriented link L in is a connected compact oriented surface contained in which has L as its boundary. The following Seifert algorithm is one way to get a Seifert surface from a diagram D of L.
Let D be a diagram of an oriented link L. In a small neighborhood of each crossing, make the following local change to the diagram;
When this has been done at every crossing, the diagram becomes a set of disjoint simple loops in the plane. It is a diagram with no crossings. These loops are called Seifert circles. By attaching a disc to each Seifert circle and by connecting a half-twisted band at the place of each crossing of D according to the crossing sign, we get a Seifert surface F for L.
The Seifert graph of F is constructed as follows;
Note that the Seifert graph
is planar, and that if
D is connected, so does
. Since
is a deformation retract of a Seifert surface
F, their homology groups are isomorphic:
. Let
T be a spanning tree for
. For each edge
,
contains the unique simple closed circuit
which represents an 1-cycle in
. The set
of these 1-cycles is a homology basis for
F. For such a circuit
, let
denote the circuit in
obtained by lifting slightly along the positive normal direction of
F. For
, the
linking number between
and
is defined by
A
Seifert matrix of
L associated to
F is the
matrix
defined by
where
. A Seifert matrix of
L depends on the Seifert surface
F and the choice of generators of
.
Let
M be any Seifert matrix for an oriented link
L. The
Alexander polynomial and
determinant of
L are defined by
For details, see [
4,
5].
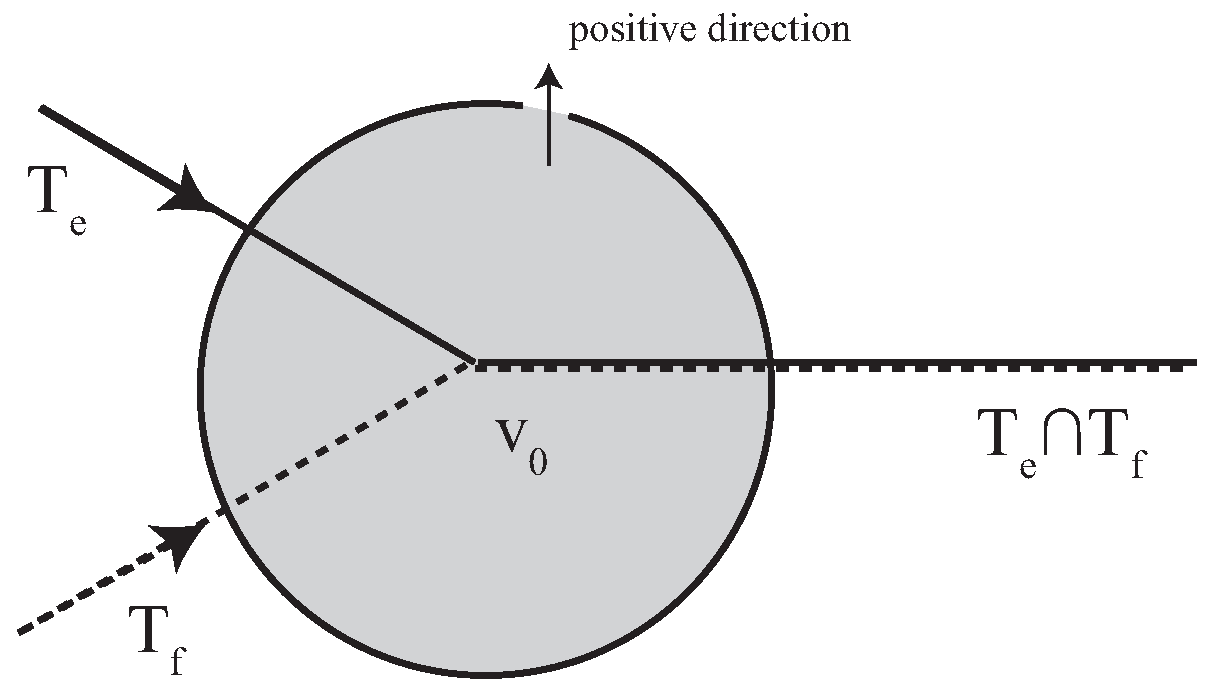
For
,
is either an empty set, one vertex or a simple path in the spanning tree
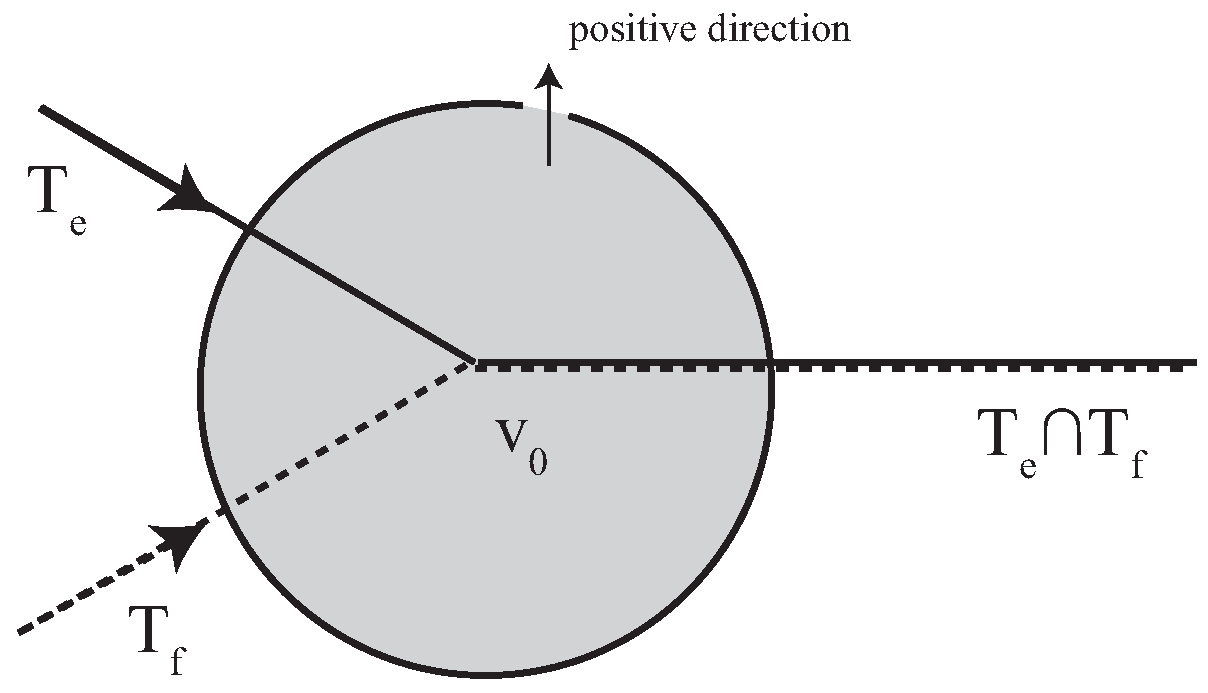
T. If
is a simple path,
and
are two ends of
, we may assume that the neighborhood of
looks like
Figure 4. In other words, the cyclic order of edges incident to
is given by
with respect to the positive normal direction of the Seifert surface. Also we may assume that the directions of
and
are given so that
is the starting point of
. For, if the direction is reversed, one can change the direction to adapt to our setting so that the resulting linking number changes its sign.
In [
6], the authors showed the following proposition which is the key tool to calculate the linking numbers for Seifert matrix of a link.
The Alexander polynomial of a knot or a link is the first polynomial of the knot theory [
7]. The polynomial was reformulate and derived in several different ways over the next 50 years. Perhaps the most satisfying of these is from the homology of the branched cyclic covering space of the knot complement. This reveals the underlying geometry and generalizes to higher dimensions and to a multi-variable version for links. See [
4]. Many researchers reformulate the Alexander polynomial as a state sum, Kauffman [
8] and Conway [
9], etc. Recently, many authors interested in the twisted Alexander polynomial and Knot Floer homology, it provides geometric information of a knot or a link, see [
10,
11,
12,
13]. The Alexander polynomial is categorified by Knot Floer homology, see [
14,
15]. Furthermore, since Alexander polynomial is a topological content of quantum invariants, Alexander polynomial is one of the most important invarinat of knot theory, see [
16].
Proposition 1 ([
6])
. For , let p and q denote the numbers of edges in corresponding to positive crossings and negative crossings, respectively. Suppose that the local shape of in F looks like Figure 4. Then, A link
L in the 3-sphere
is called a
periodic link of order
n if there is an orientation preserving auto-homeomorphism
of
which satisfies the following conditions;
,
, the fixed-point set of
, is a 1-sphere disjoint from
L and
is of period
n. The link
is called the
factor link of the periodic link
L. We denote
by
. One of an important concern of knot theory is to find the relationship between periodic links and their factor links, see [
17,
18]. In 2011, the authors expressed the Seifert matrix of a periodic link which is presented as the closure of a 4-tangle with some extra restrictions, in terms of the Seifert matrix of quotient link in [
2].
Let
I be a closed interval
and
k a positive integer. Fix
k points in the upper plane
of the cube
and the corresponding
k points in the lower plane
. A
-
tangle is obtained by embedding oriented curves and some oriented circles in
so that the end points of the curves are the fixed
-points. By a
-tangle, we mean a
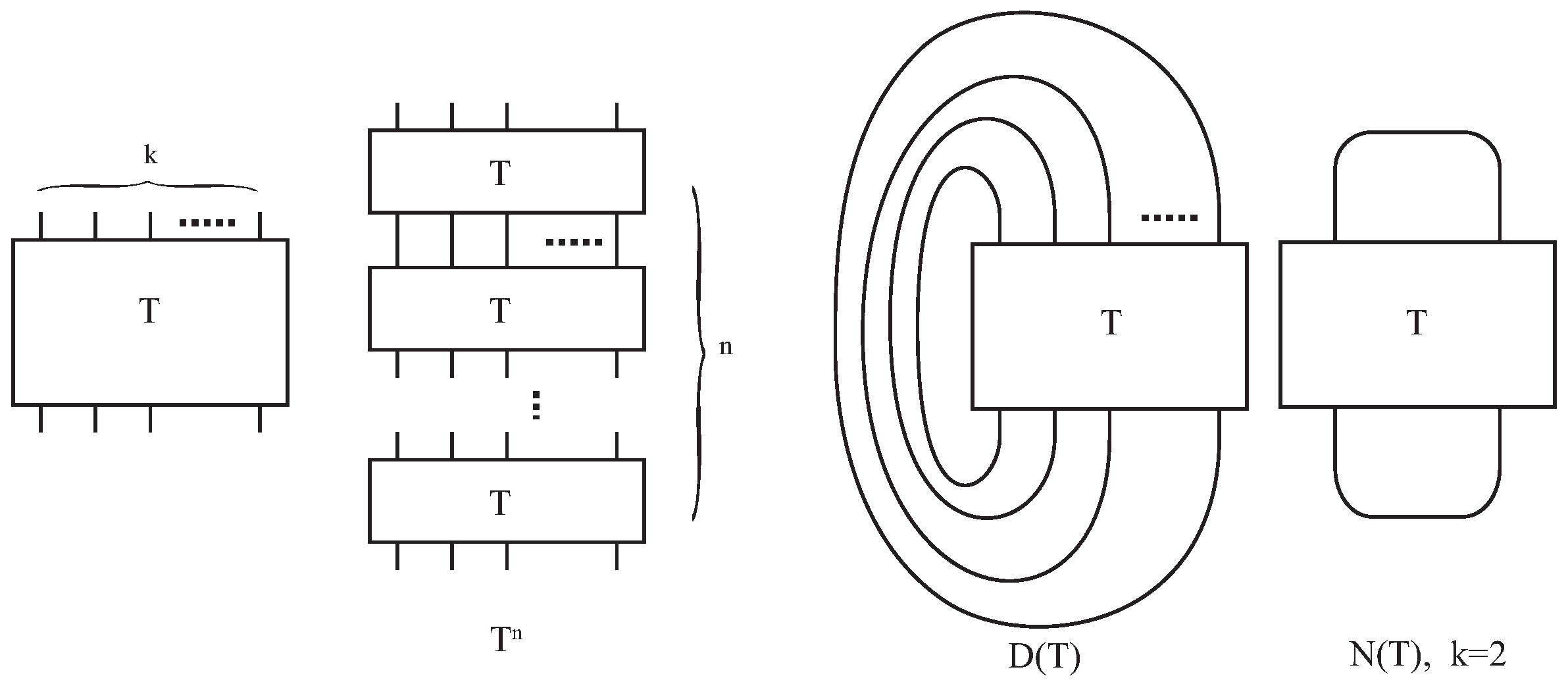
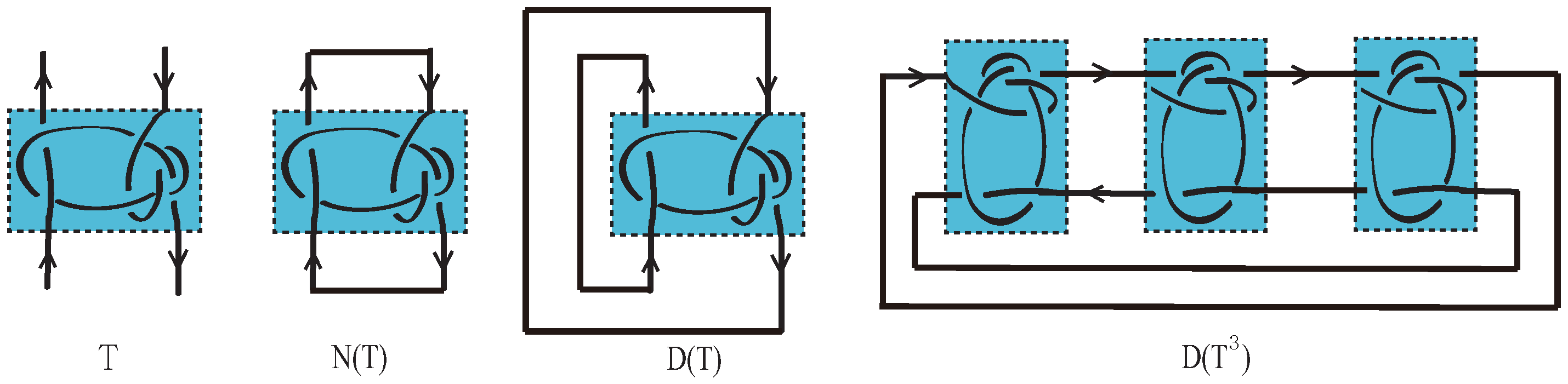
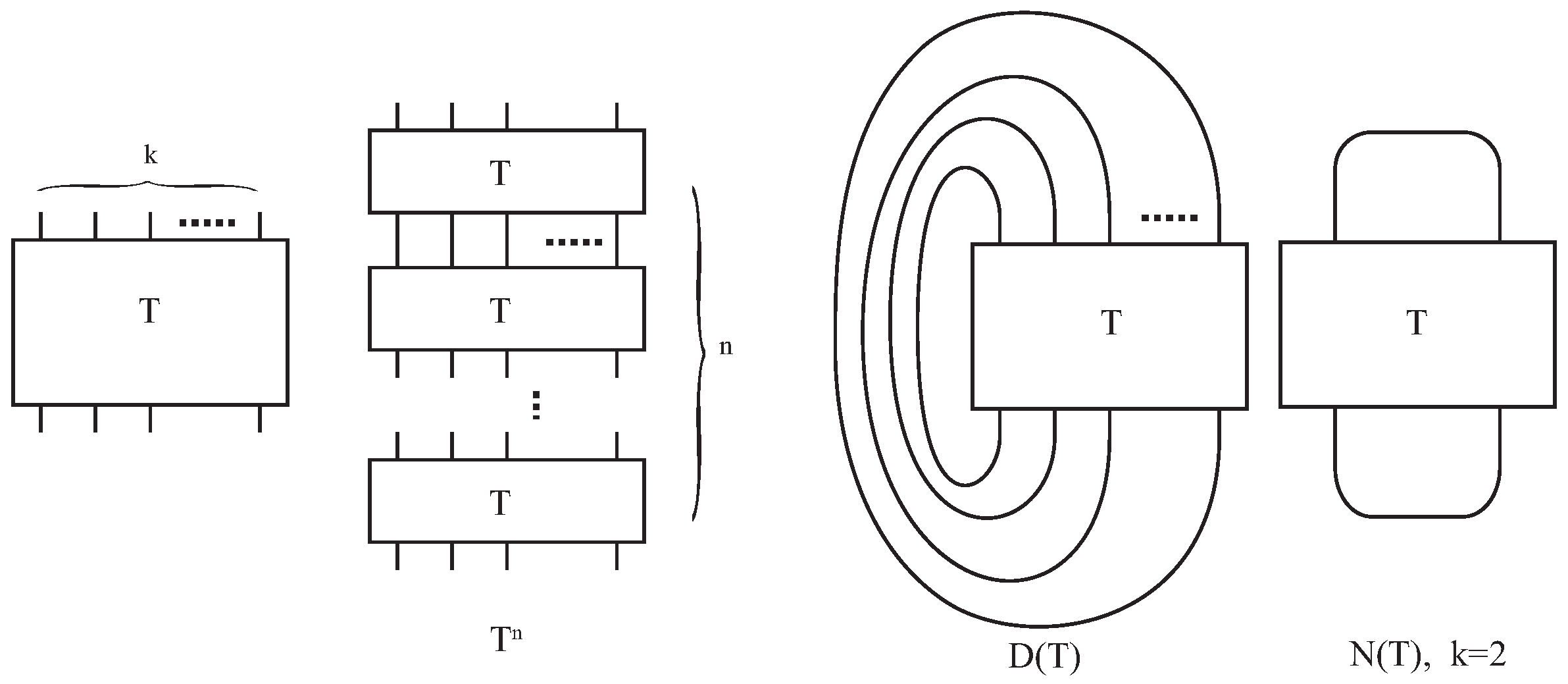
-tangle. Let
T be a
-tangle. For an integer
, let
denote the
-tangle obtained by stacking
Tn-times. The
denominator of
T is defined by connecting the top ends of
T to the bottom ends by parallel lines, see
Figure 5. In particular, if
T is a 4-tangle, then the
numerator of
T is defined as the last picture in
Figure 5. Clearly,
is a periodic link of order
n whose factor link is
. If an orientation is given on
, then it induces an orientation of
. Notice that every (oriented) periodic link can be constructed in this way.
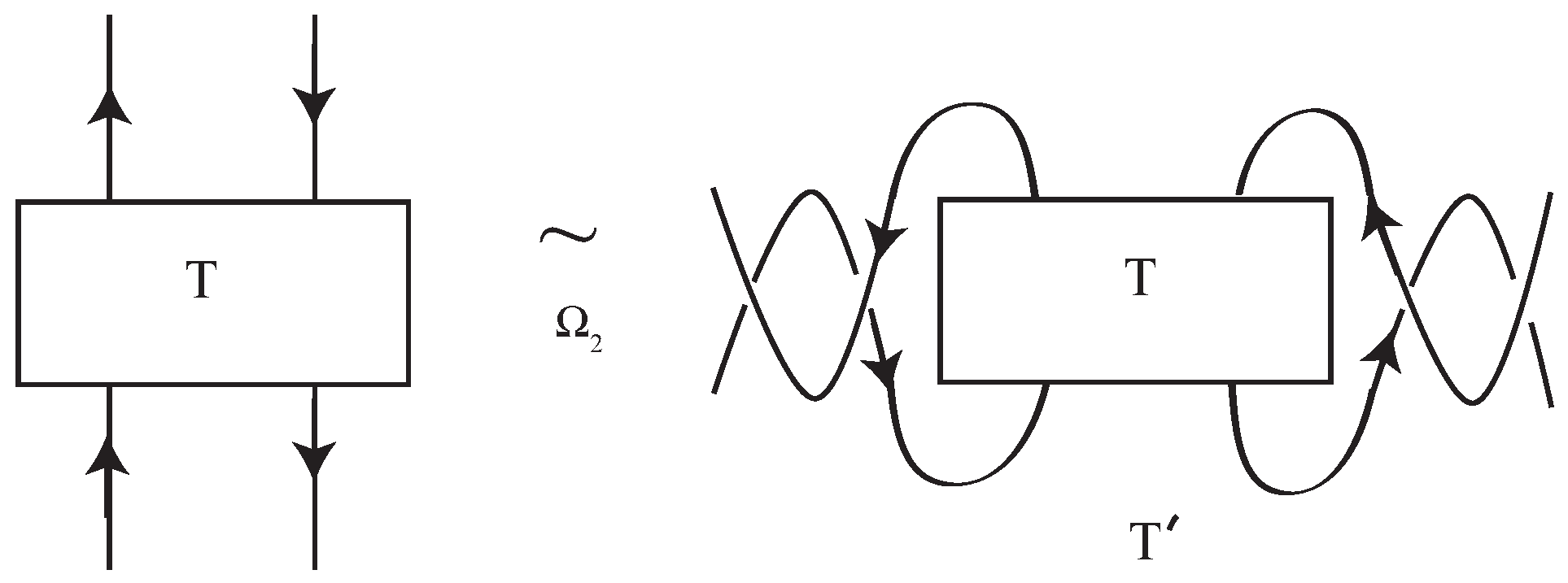
Let
T be a 4-tangle and let
denote the denominator of
T which is obtained by connecting the top ends and the bottom ends of
T by parallel curves
and
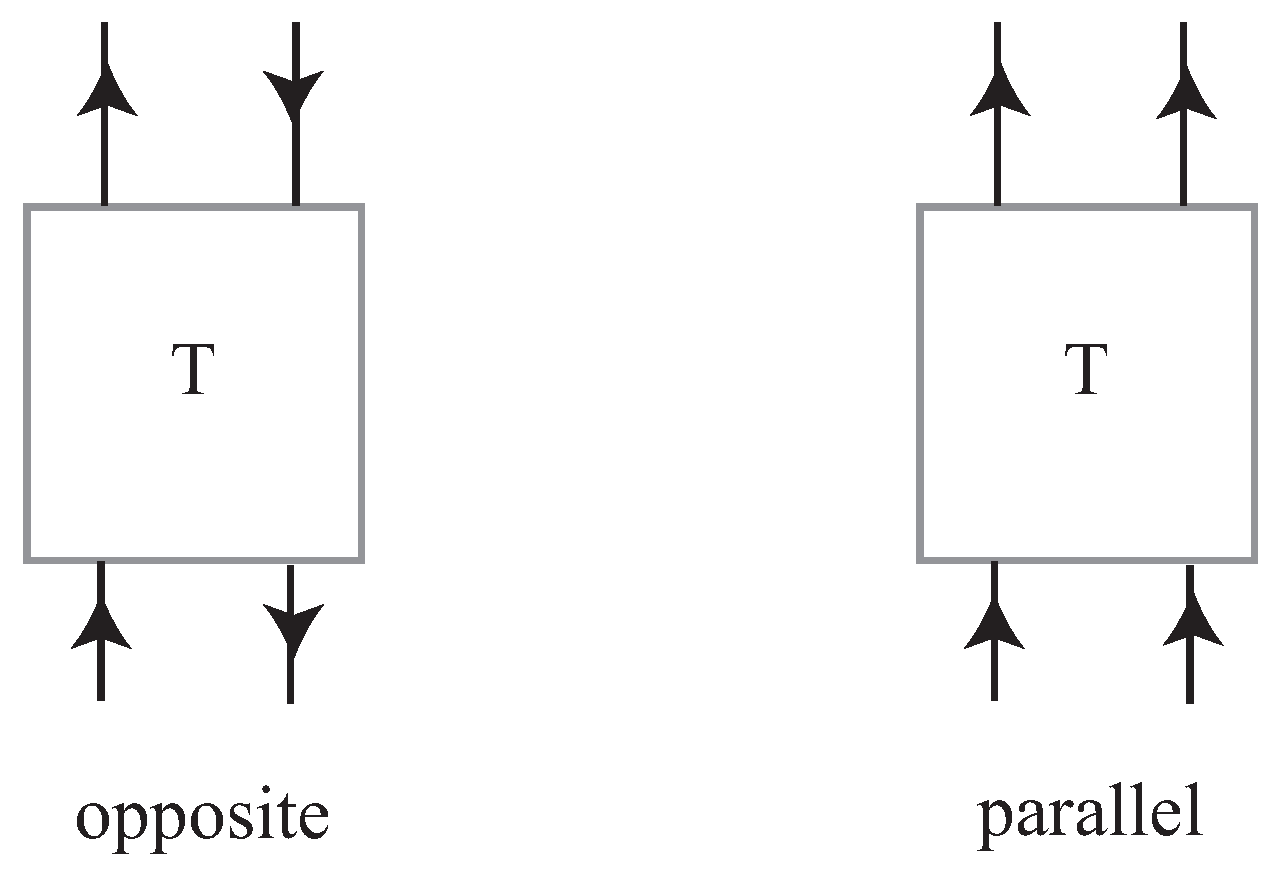
. Suppose that
is oriented. Note that the induced orientation at
and
are either opposite or parallel, see
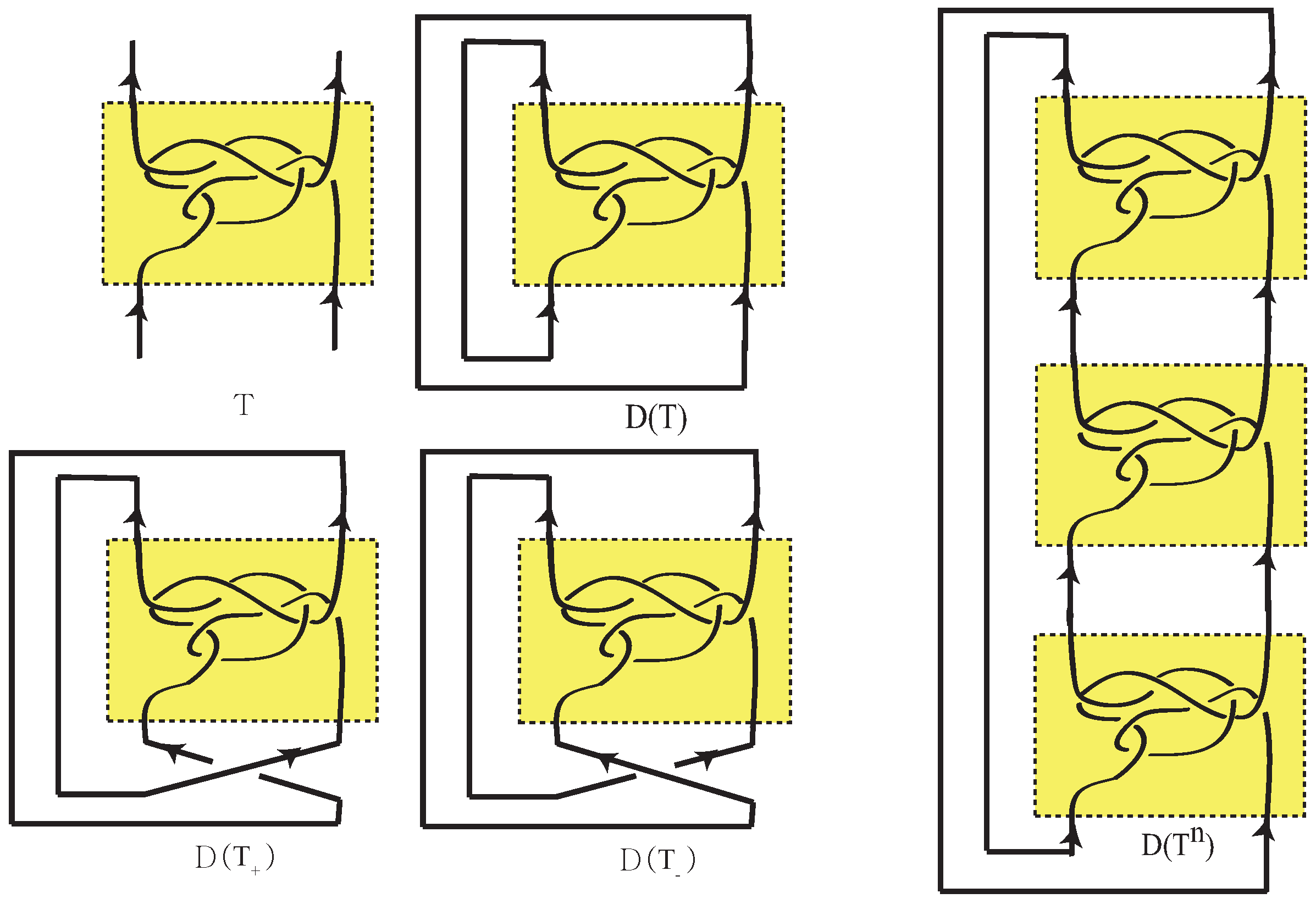
Figure 6.
If the induced orientation at and are parallel, then and are contained in different Seifert circles of . Hence we have the following three cases.
- Case I:
The orientations at the end points of the curves in
T are opposite and the two outer arcs
and
of
are contained in the same Seifert circle, see the first picture in
Figure 7.
- Case II:
The orientations at the end points of the curves in
T are opposite and the two outer arcs of
are contained in different Seifert circles, see the second picture in
Figure 7.
- Case III:
The orientations at the end points of the curves in
T are parallel, see the last picture in
Figure 7.
3.1. Periodic Links with Periodicity in Case I
In Case I and Case II, the numerator of T is well-defined as an oriented link. In particular, in Case I, the linking number between any Seifert circle of and the periodic axis is always 0, which is equivalent to that for any Seifert circle C of . For Case I, the authors gave the following criteria for Alexander polynomial of the periodic link by using those of the denominator and the numerator of a 4-tangle T.
Proposition 2 ([
2])
. Let L be a periodic link of order n with the factor link . Suppose that and for a 4-tangle T. If for any Seifert circle C of , then the Alexander polynomials of L, and are related as follows; Indeed, to get the result, the authors showed the following proposition and then applied the determinant formula for the matrix (
1).
Proposition 3. If T is a 4-tangle in Case I, then there exist Seifert matrices and of and , respectively, such thatwhere B is a column vector, C is a row vector, O is the zero-matrix and the number of block is n. 3.2. Periodic Links with Periodicity in Case II
In Case II, there is a Seifert circle C of such that . In fact where and denote Seifert circles in containing and , respectively.
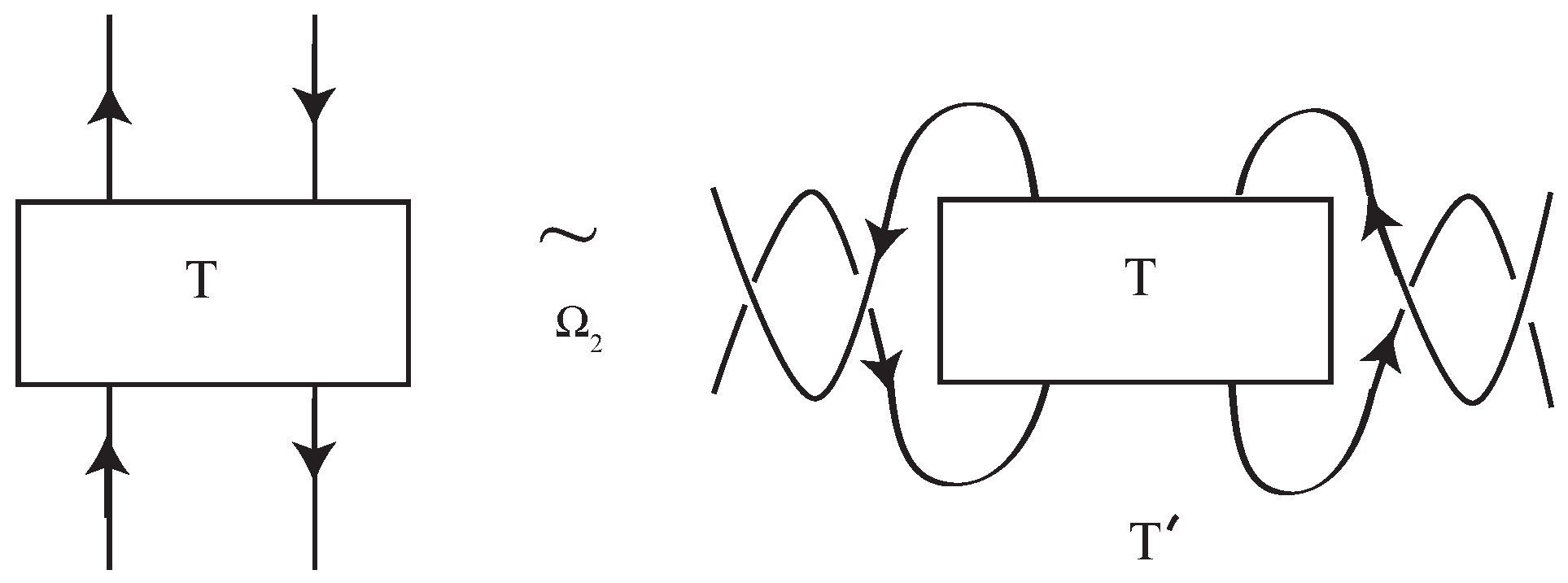
Lemma 1. If T is a 4-tangle in Case II, then there exist Seifert matrices and of and , respectively, such thatwhere B is a row vector, C is a column vector, O is the zero-matrix, the number of block is n, and the number of block is . Proof. Suppose that the orientations at the end points of the curves in
T are opposite and the two outer arcs of
are contained in different Seifert circles. Without loss of generality, we may assume that
T looks like
as seen in
Figure 8 that obtained from
T by applying the Reidemeister move II between the left two outer curves and the right two outer curves of
T, respectively. Note that
,
and
are ambient isotopic to
,
and
, respectively.
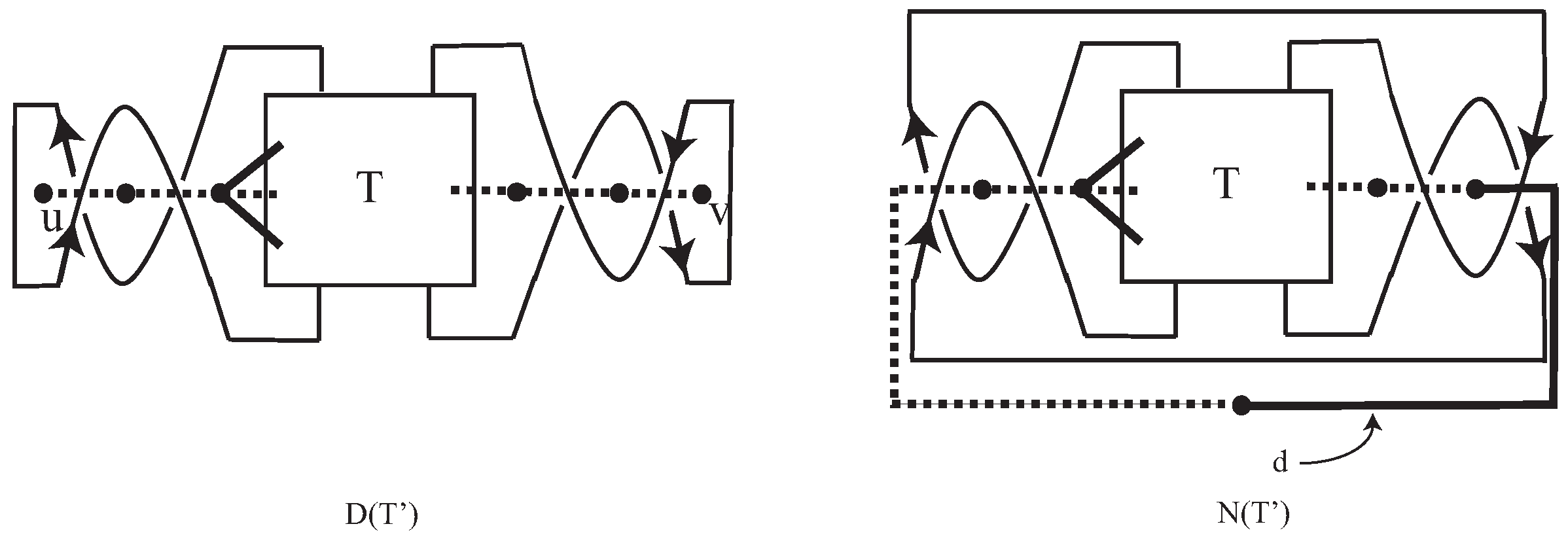
The Seifert graphs
and
of
and
are of the form in
Figure 9, in which spanning trees
and
of
and
are given by dotted edges in
Figure 9. Notice that
is obtained from
by identifying the left vertex
u to the right vertex
v in
as shown in the right picture in
Figure 9. If
, then
where
d is the new edge of
as shown in
Figure 9.
The corresponding Seifert matrix
of
is a
matrix, while the Seifert matrix
of
is a
matrix. Furthermore, the linking number between
and
in
is equal to the linking number between
and
in
for all
, by Proposition 1. Indeed,
for all
. Hence the Seifert matrix
of
is given by
where
and
From now on, we will try to find a Seifert matrix
of
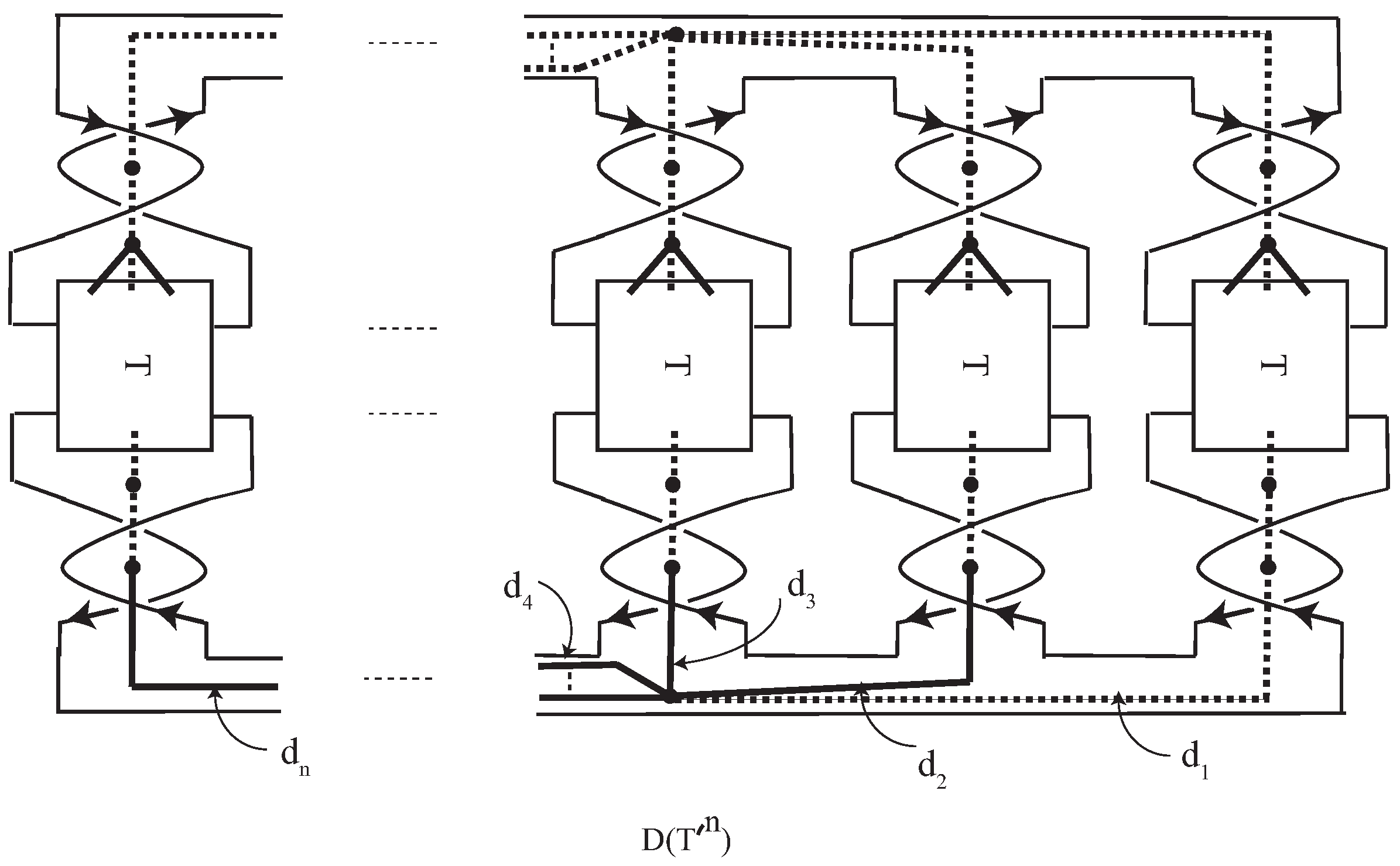
. The Seifert graph
of
consists of
n copies of
whose final vertices
u and
v are used to connect the copies of
as shown in
Figure 10. Let
be the corresponding
pth copy of
d for all
in
. By removing
-copies of the edge
d, e.g.,
in
Figure 10, we get a spanning tree
of
. Indeed,
where
is the corresponding
pth copy of
.
Since the linking number between
and
in
is equal to the linking number between
and
in
for all
and
we have
where
. If
, since
and
do not intersect,
for all
by Proposition 1. Hence,
On the other hand, since lies in the 1st copy and pth copy of , we have , , and for all . For and , and since and do not intersect in .
Since T is connected, the generator runs through 2 copies, in each of which the self linking number of is equal to D for all . Furthermore, since the orientations at the end points of the curves in T are opposite, D is even. Hence, for all , by Proposition 1. For all and , Because generators and meet in the just 1st copy. ☐
Hence by using Theorem 1, we get the following result.
Theorem 3. Let L be a periodic link of order n with the factor link . Suppose that and for a 4-tangle T in Case II. Then the Alexander polynomials of , and are related as follows; Proof. By the definition of the Alexander polynomial of a link and by Lemma 1, we have
☐
Since the result in Theorem 3 (Case II) equals that in Proposition 2 (Case I), we can summarize them as
Theorem 4. Let L be a periodic link of order n with the factor link . Suppose that and for a 4-tangle T whose numerator is defined. Then the Alexander polynomials of L, and are related as follows; Theorem 5. Let L be a periodic link of order n with the factor link . Suppose that and for a 4-tangle T whose numerator is defined. Then the determinants of L, and are related as follows; Proof. Note that
for any oriented link
L. By Theorem 4, we have
☐
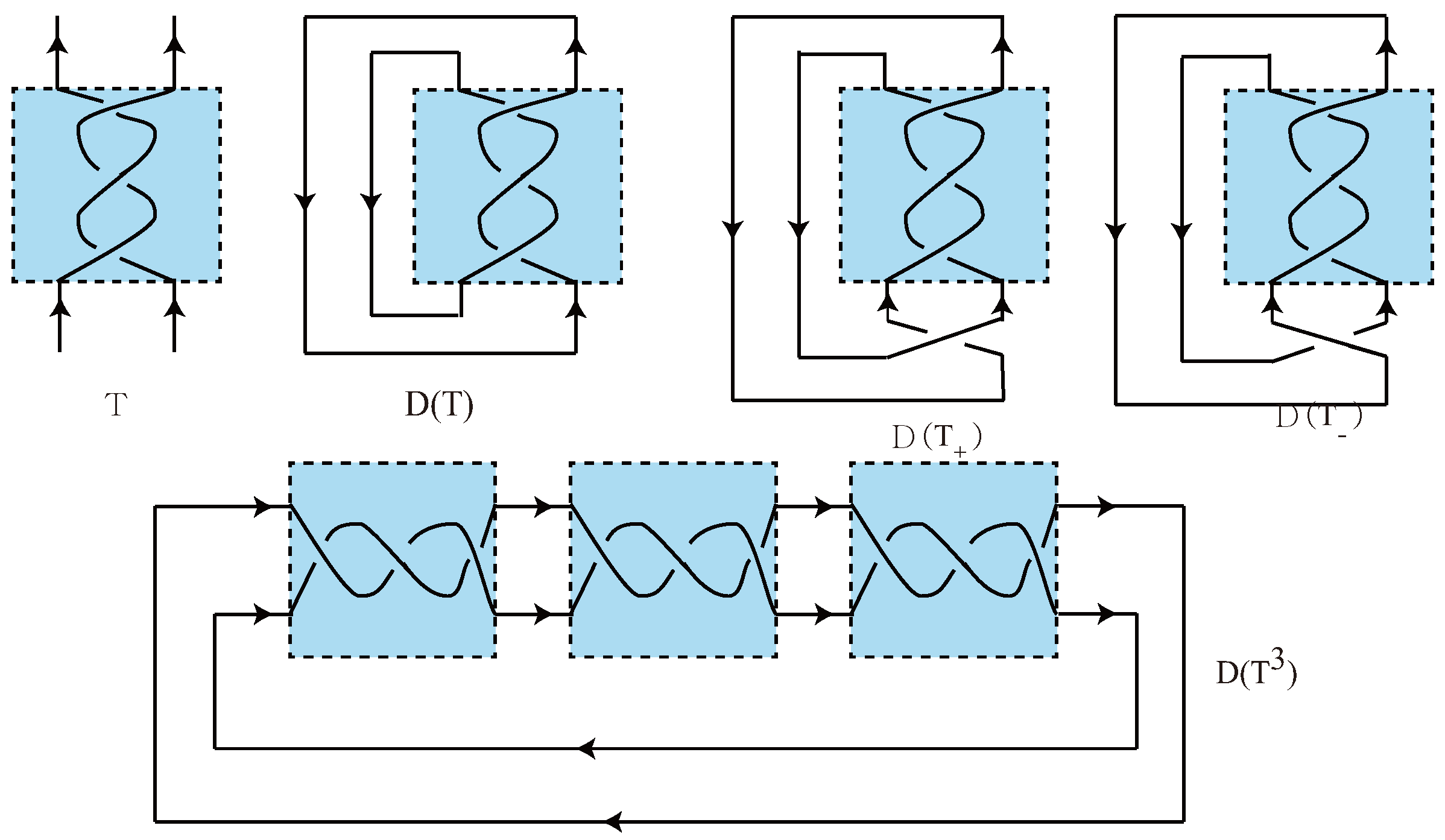
Example 1. Consider the oriented 4-tangle T in Figure 11, which is a 4-tangle in Case II. The Seifert matrices of and are given bywhile By the direct calculation, one can see that the Alexander polynomials of and are By using Theorem 3, we get the Alexander polynomial of ; Finally, one can get by Theorem 5 because and .
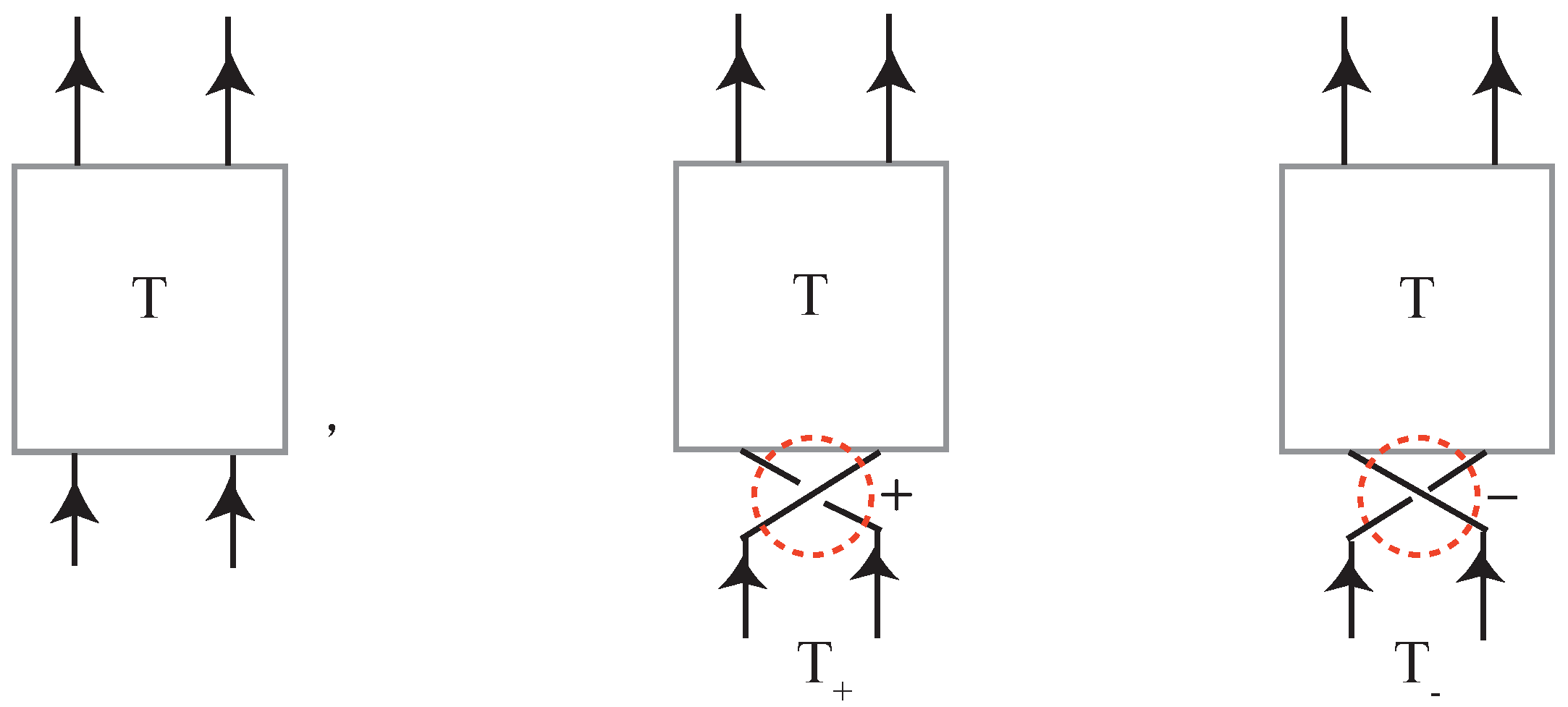
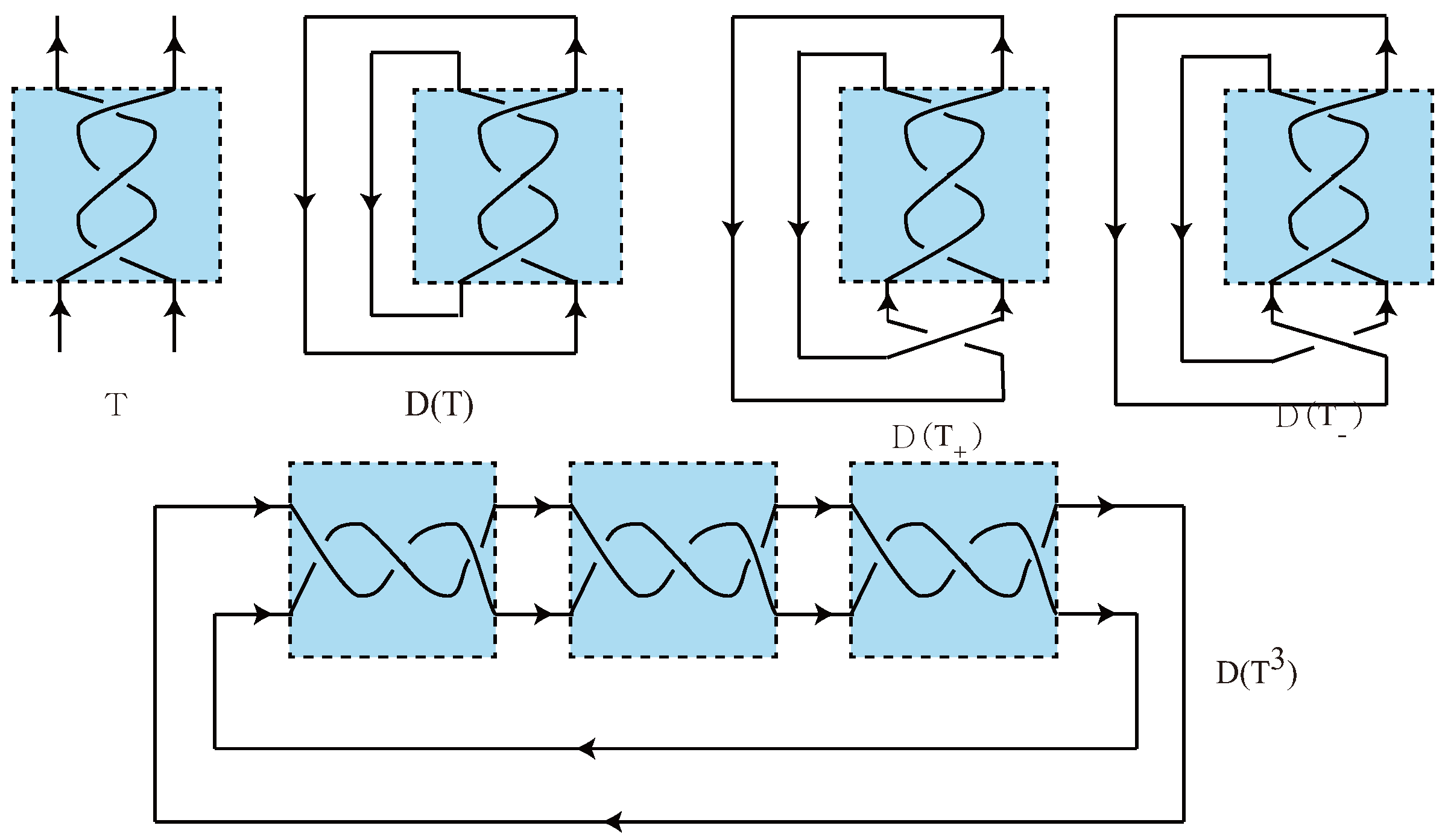
3.3. Periodic Links with Periodicity in Case III
In Case III, recall that the orientation of
T is given as the left of
Figure 12 so that there exist exactly two Seifert circles
and
in
such that
. Note that the orientation of
T cannot be extended to an orientation of
. Define
and
by adding a positive crossing and a negative crossing at the bottom of
T respectively, as shown in
Figure 12.
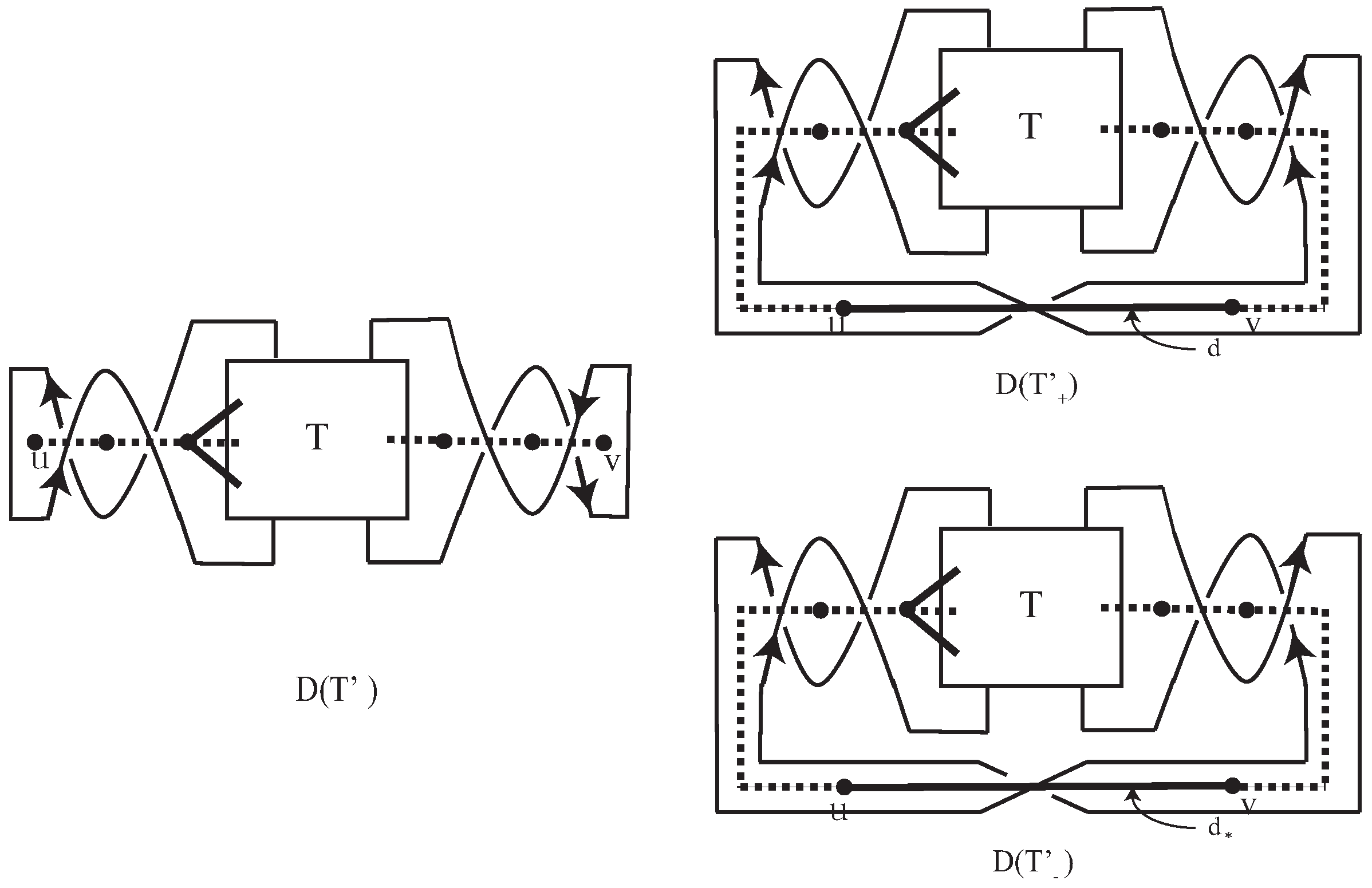
Lemma 2. If T is a 4-tangle in Case III, then there exist Seifert matrices and of and , respectively, such thatwhere B is a row vector, C is a column vector, O is the zero-matrix, , the number of block is n and the number of block is . Proof. Since the process of the proof is similar to that of Theorem 3, we will give briefly sketch of the proof.
The Seifert graphs
,
and
of
,
and
are of the form in
Figure 13, in which spanning trees
,
and
of
and
are given by dotted edges in
Figure 13.
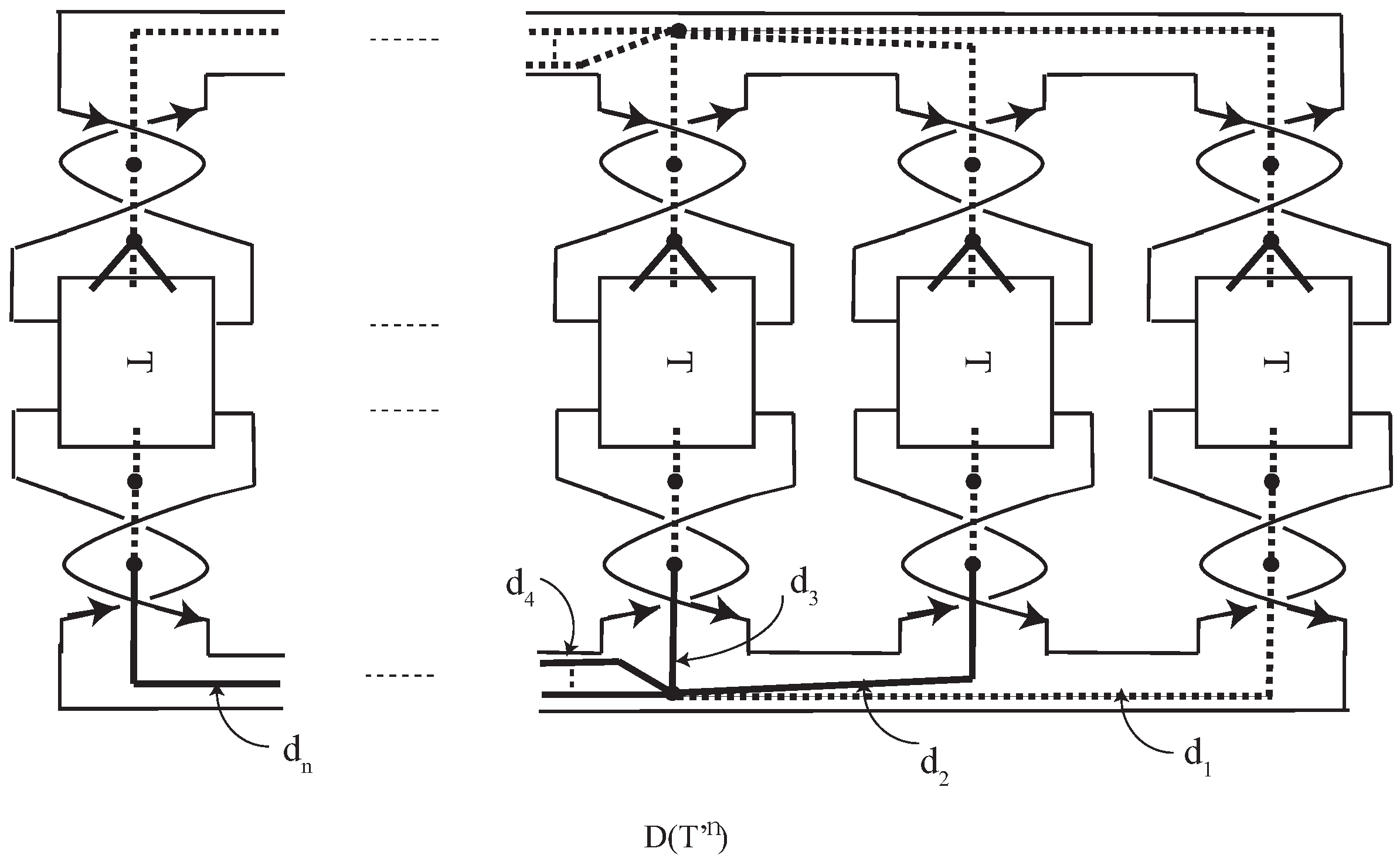
The Seifert graph
of
consists of
n copies of
whose the end vertices
u and
v are used to connect the copies of
as shown in
Figure 14. Let
be the corresponding
pth copy of
d for all
in
. Notice that by the construction of
,
d and
correspond to the same edge in
, where
d and
were new edges in
Figure 13. By removing
-copies of the edge
d (or
) in
, e.g.,
in
Figure 14, we get a spanning tree
of
. ☐
By using the determinant formula in Theorem 2, we get the following theorem.
Theorem 6. Let L be a periodic link of order n with the factor link . Suppose that and for a 4-tangle T in Case III. Then the Alexander polynomials of L, , and are related as follows; Proof. By the definition of the Alexander polynomial of a link and by Lemma 2, we have
☐
In general, the determinant of cannot be calculated by using Theorem 6 because . But we can calculate the determinant of under certain conditions.
Theorem 7. Let L be a periodic link of order n with the factor link . Suppose that and for a 4-tangle T in Case III. If , thenwhere m is the size of a Seifert matrix of . Proof. Notice that, for a Seifert matrix of a link L.
From the definition of the determinant of a link, Theorem 2 and Lemma 2, if the Seifert matrix
of
is an
matrix and
, then the determinant of
is
The identity (1) comes by the condition
because
☐
Example 2. Consider the oriented 4-tangle T in Figure 15, which is a 4-tangle in Case III. The Seifert matrices of , and are given bywhile By direct calculation, one can see that the Alexander polynomials of , and are By using Theorem 6, we get the Alexander polynomial of ; Remark 2. In Theorem 7, the condition is essential. Consider the oriented 4-tangle T in Figure 15, which is a 4-tangle in Case III. By direct calculation, one can see that the determinant of . The result is the same with in Theorem 7. We can easily check this example satisfies the condition. Consider the oriented 4-tangle T in Figure 16, which is a 4-tangle in Case III. The Seifert matrices of , and are given bywhile By direct calculation, one can see that the Alexander polynomials of , and are By using Theorem 6, we get the Alexander polynomial of ; Finally, one can see that by direct calculation. The result is not equal to since and . We can check that this example doesn’t satisfy the condition since .

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}