1. Introduction
Thanks to useful properties of B-spline, it has been considered the de factor standard for modeling freeform curves and surfaces in computer-aided design and computer graphics [
1,
2]. Knot insertion property provides an additional degree of freedom for refining B-spline curves and surfaces without any change in their shape.
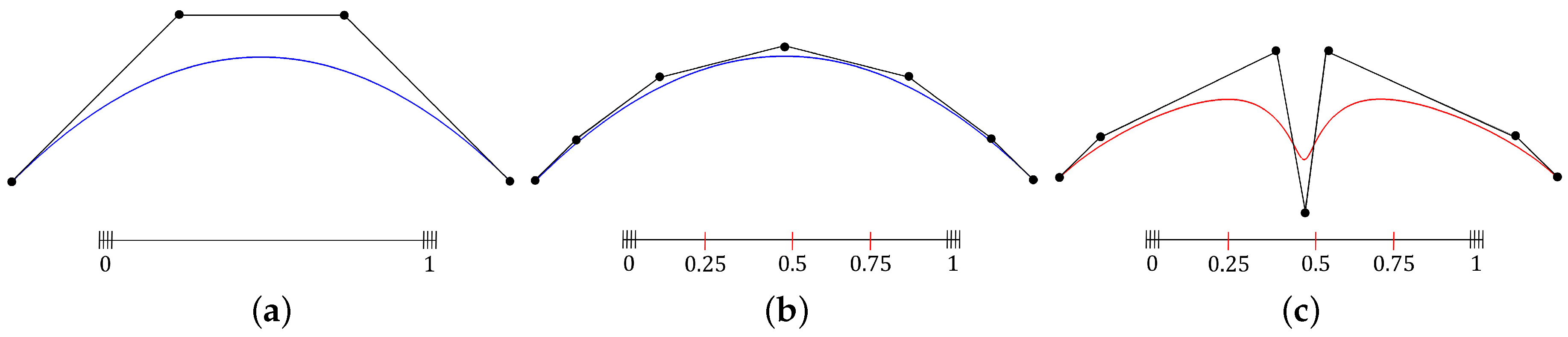
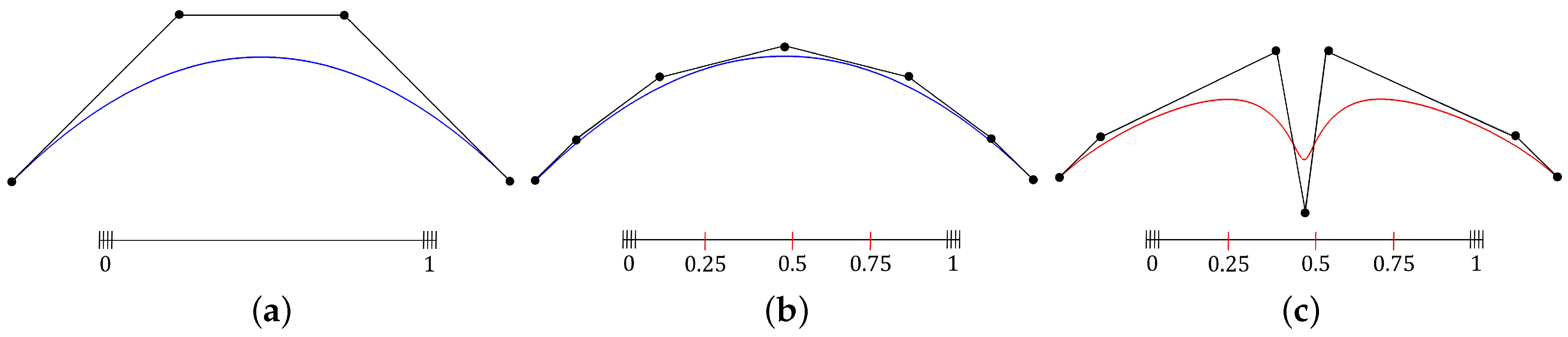
Figure 1 shows an example of designing a B-spline curve using knot insertion technique.
Hierarchical B-splines [
3] support the editing of curves and surfaces at multiple levels of detail using knot insertion or refinement.
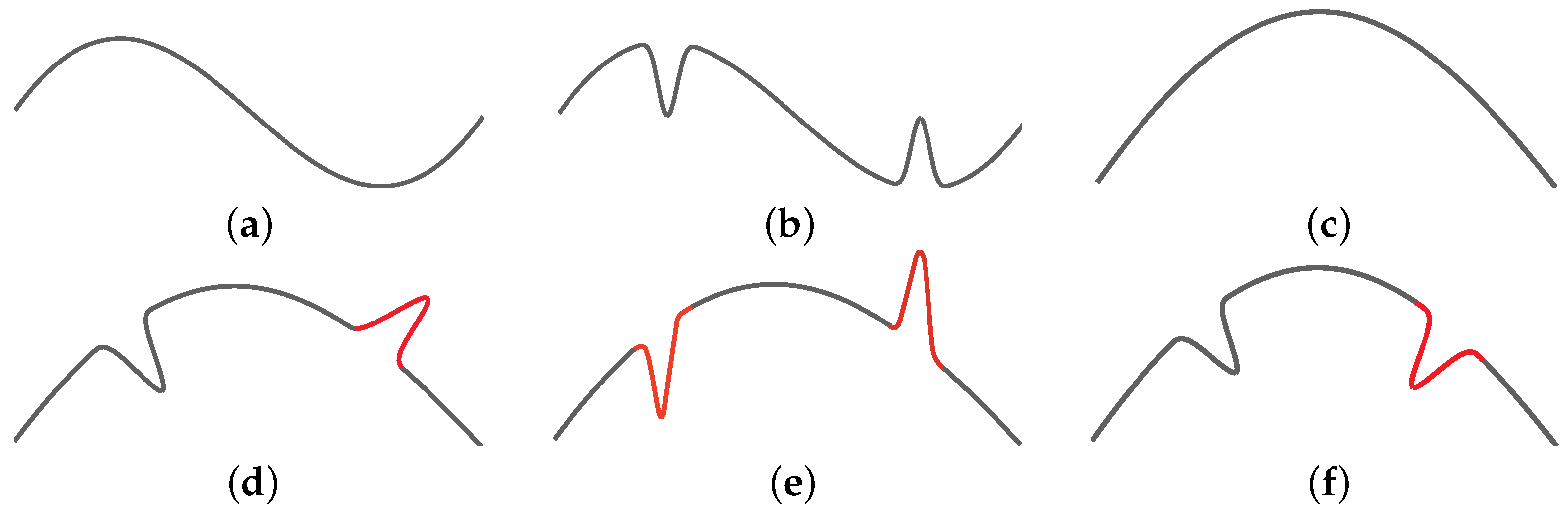
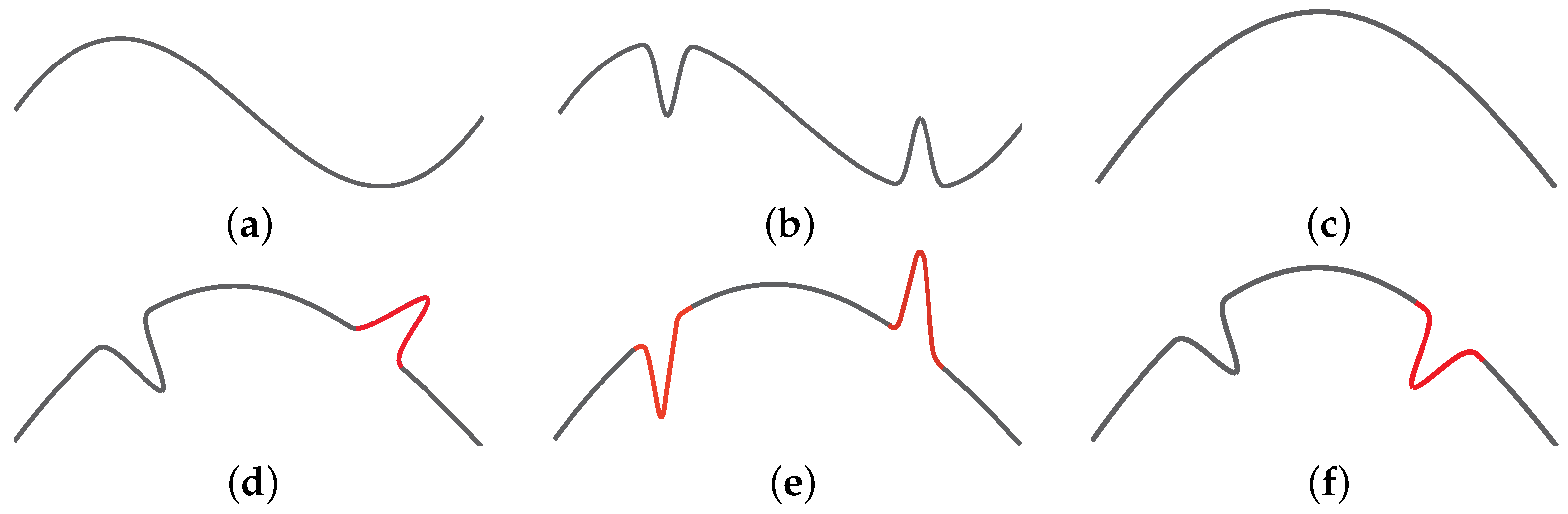
Figure 2 illustrates typical multilevel editing processes.
Figure 2a shows a cubic B-spline curve represented at a low level (i.e., with few knots) and
Figure 2b shows the result of editing the same curve at a higher level (i.e., after extra knots have been inserted). If a user goes back to the lower level, edits the curve in the way shown in
Figure 2c, and then returns to the higher level, we would expect the curve to have the shape shown in
Figure 2d. However, the actual result is the same as
Figure 2e because the edited displacements at the higher level are represented in a fixed coordinate system. If we expect to maintain the orientation of the details made at the higher level, the edited displacements should be represented in certain coordinate frames on the curve at the lower level.
One obvious choice for the local coordinate systems can be the Frenet frames. Finkelstein and Salesin [
4] discussed the orientation of details in this type of editing. They used the Frenet frames (i.e., tangent, normal and bi-normal to a curve) to define a local coordinate system. However, the normal vectors are obtained from the second derivatives of a curve, and thus they can suddenly flip at inflection points while generating undesired effects.
Figure 2f illustrates this problem in which the edited displacements are added to a curve in the opposite direction.
In this paper, we extend the traditional method for multilevel editing of B-spline curves to have correct orientation of details at each editing level. For this, we employ the rotation minimizing frames (RMFs) [
5] of a curve as the reference coordinate system. RMFs are obtained from only tangent vectors in a way that minimizes the rotation between successive frames. Tangent vectors are the first derivatives of a curve, and thus they do not suffer from the flipping problems caused by the Frenet frames. The use of RMFs guarantees stable local frames regardless of the shape or degree of a curve. Displacements introduced at a level
j are represented in RMFs at a level
, and thus changes made at higher levels are accurately retained, as shown in
Figure 2d.
Our multilevel editing technique can effectively be used for modeling planar or spatial B-spline curves with highly detailed shapes. A user can easily change the overall shape of a curve, while preserving the orientation of details edited at higher levels. We also apply our technique to the multilevel editing of camera motions, which can easily be achieved by editing the associated curve component.
The main contributions of this work can be summarized as follows:
We present a robust and effective method for preserving orientation of details in the multilevel editing of B-spline curves.
We choose RMFs as the reference coordinate system and show that they are stable and suitable for preserving orientation of details rather compared to other reference frames.
Our technique can easily be applied to the multilevel editing of 3D camera motions by editing its curve component.
The rest of this paper is organized as follow. In
Section 2 we briefly summarize related recent work on multilevel editing of B-spline curves and surfaces.
Section 3 defines a multilevel B-spline curve with orientation of details. In
Section 4, the multilevel editing of B-spline curves is explained in details, and experimental results are then presented in
Section 5. Finally, we conclude this paper in
Section 6 and suggest future work.
2. Related Work
Forsey and Bartel [
3] introduced a hierarchical B-spline representation which uses a knot refinement and overlay technique. This representation allows a user to edit a B-spline surface at different levels of detail by specifying offset displacements which are represented relatively to a local frame. For regular surfaces, a tangent plane can provide the reference coordinate system. However, it is difficult for curves to choose reference coordinate frames which are defined smoothly over the entire curve. Finkelstein and Salesin [
4] proposed a multiresolution representation of a curve using wavelets that allows the curve to be edited while its details are preserved. However, the reference frames required for local editing are not stable since they can flip at inflection points of a curve. Recently, hierarchical B-splines have been widely used not only in geometry modeling but also geometry analysis. Vuong et al. [
6] employed hierarchical B-splines for local refinement in isogeometry analysis and Bornemann and Cirak [
7] presented a subdivision scheme for easy implementation of hierarchical B-splines and succeeded to integrate them into existing finite element software.
Elber and Gotsman [
8] extended the multiresolution representation of uniform B-spline curves to non-uniform rational B-splines, and presented a technique for converting NURBS curves to their multiresolution representation, with an error that is minimized. Prusinkiewicz et al. [
9] and Poon et al. [
10] presented a multiresolution representation in which a curve is subdivided by means of an L-system. Dreger et al. [
11] proposed a multiresolution representation of triangular B-spline surfaces of arbitrary degree.
Recently, a variety of multiresolution editing techniques satisfying given geometric constraints have been proposed. Elber [
12] introduced a multiresolution editing technique that satisfies a symmetric linear constraint. Hahmann et al. [
13] proposed a multiresolution editing technique for preserving the area of a closed planar curves, while Sauvage et al. [
14] preserved the length of a curve. Olsen et al. [
15] showed how to construct a multiresolution local filter for B-splines based on subdivision curves. This technique can be applied efficiently to the subdivision of meshes with arbitrary topologies. Li el al. [
16] constructed multiresolution curves using constrained B-spline wavelets. For polygonal meshes, Kobbelt and Botsch [
17] proposed a new multiresolution model based on volume elements. The details between different levels are encoded by displacement volumes and they are added to the base surface without self-intersections when the base surface is edited. However, none of these methods except our previous work [
18] deal with the problem of preserving the orientation of details.
In this paper, we deal with the orientation of details in multilevel editing of B-spline curves. For this end, we need a reference coordinate system in which the edited details can be represented robustly. A moving frame that does not rotate about the instantaneous tangent of a curve is called a rotation minimizing frame (RMF). RMFs are widely used in many applications in computer graphics, sweep surface modeling [
19], generalized cylinder modeling [
20,
21] and motion design and control [
22]. However, exact RMF (i.e., closed form) computation is non-trivial and thus a number of approximation techniques [
5,
23,
24,
25] have been proposed. We employ RMFs as a reference coordinate system and represent the edited details in RMFs.
4. Multilevel Editing with Orientation of Details
For an intuitive curve editing, our system supports a direct manipulation of curve points [
1]. For example, a user can select an arbitrary point
on
and move it to a new position
, which produces the edited displacement
. Depending on the editing level
j, the displacement
can be interpreted as the corresponding changes
in the control points
of the displacement function
. Note that
is computed in the fixed coordinate system and thus must be expressed in the RMF
. This process updates the control points as follows:
where the inverse matrix
can be replaced with the transpose matrix
since
is an orthogonal matrix.
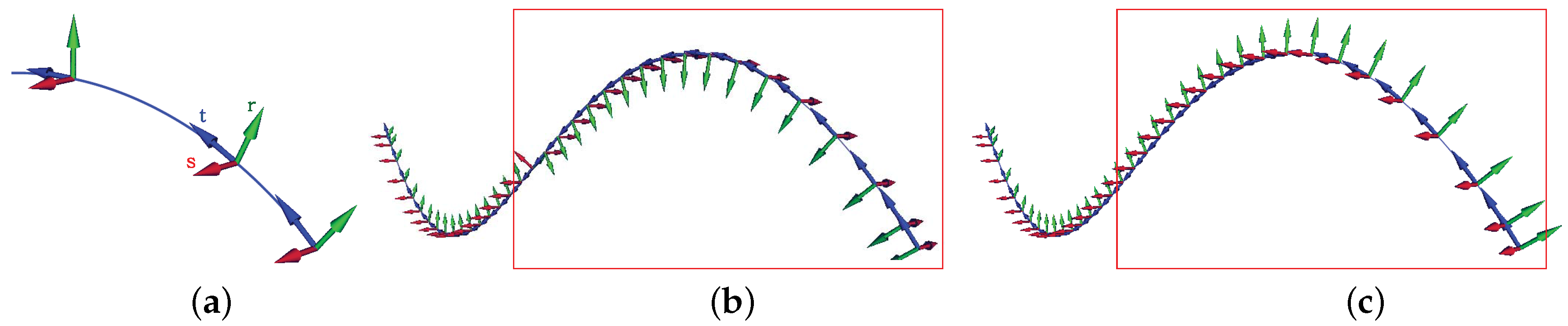
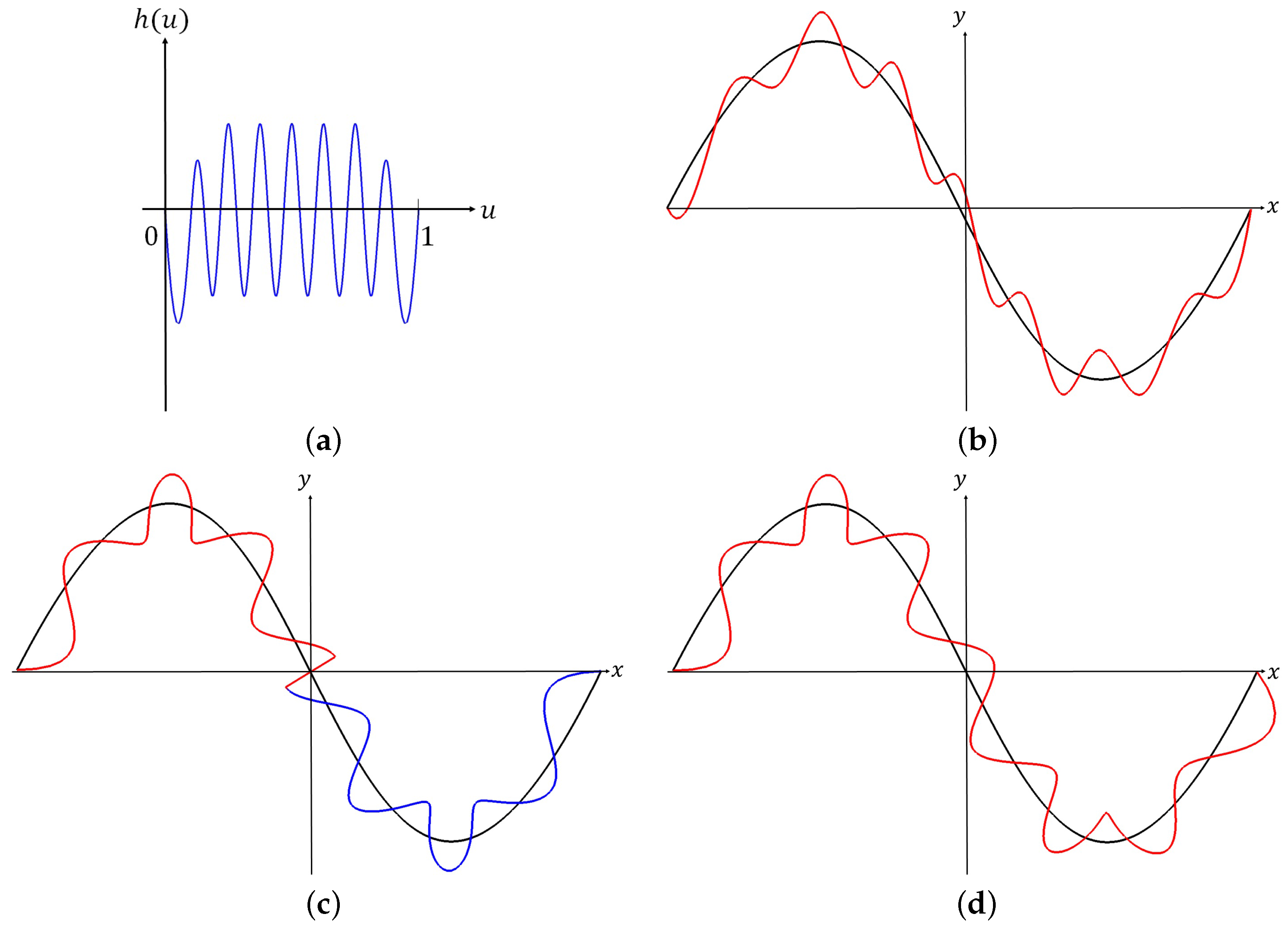
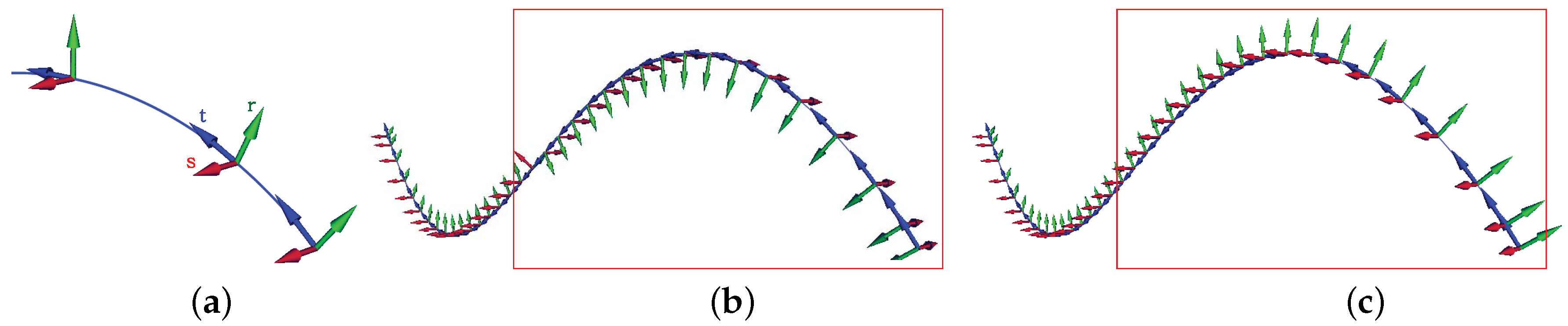
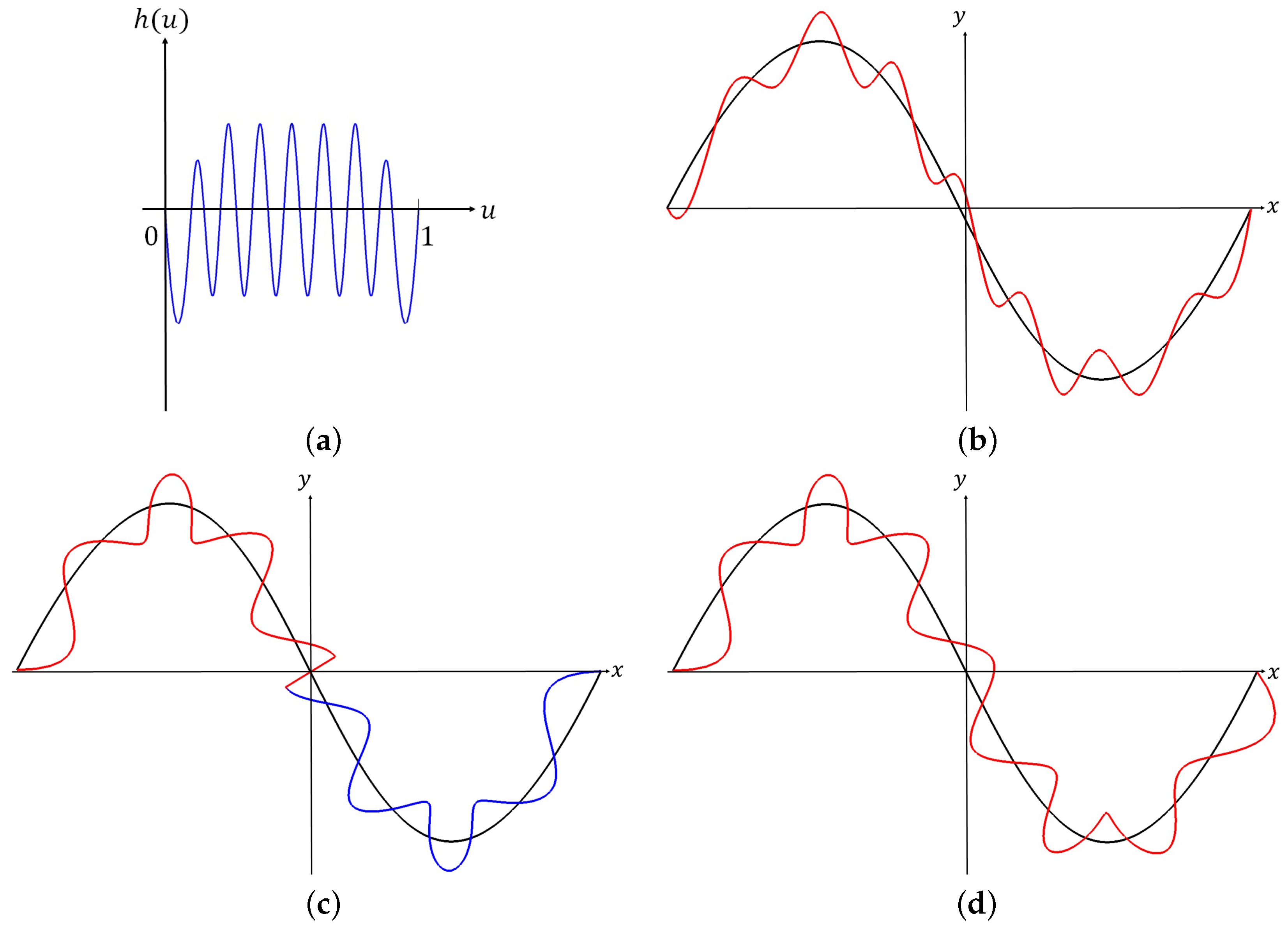
Figure 5 illustrates examples of editing a B-spline curve with and without orientation of details. Let
be a displacement function to be added to a curve
.
Figure 5a shows the graph of
, for
.
Figure 5b–d show the results when
is added to three different reference frames on
(in black), respectively.
Figure 5d shows that
is added to
while keeping its orientation correctly, whereas it flips at the origin where the second derivative of
vanishes in
Figure 5c.
Algorithm 1 shows the pseudo code for multilevel editing of a B-spline curve while preserving the orientation of details. Note that if the displacement function
at level
j is edited, then all RMFs in the next levels from
j to
k should be updated (in lines 3–11 in Algorithm 1). The complexity of Algorithm 1 can be measured by counting the number of times that the lines 5 and 9 are executed. Suppose that a cubic B-spline curve
is defined on the knot vector
and the knot vectors are repeatedly refined at midpoints as explained in
Section 3. At editing level
, the lines 5 and 9 are executed
times, respectively. The upper bound can be determined from
, which results in total
times. Although the complexity increases exponentially, i.e.,
, it would be an inevitable result because the number of control points increase exponentially at each level by the midpoint refinement of knot vectors.
| Algorithm 1: Multilevel editing of a B-spline curve at level j. |
INPUT:
j : editing level
: edited displacements of control points
OUTPUT:
: curve edited at level j
1: BEGIN
2:
3: FOR TO k
4: FOR TO
5:
6: END FOR
7:
8: FOR TO
9: Update RMFs at node parameters of
10: END FOR
11: END FOR
12: END BEGIN
9: RETURN |
5. Experimental Results
We implemented our algorithm in C++ on an Intel(R) Core(TM) i7 2.00 GHz CPU with a 16 Gb main memory and an Intel(R) Iris(TM) Pro Graphics 5200 video card.
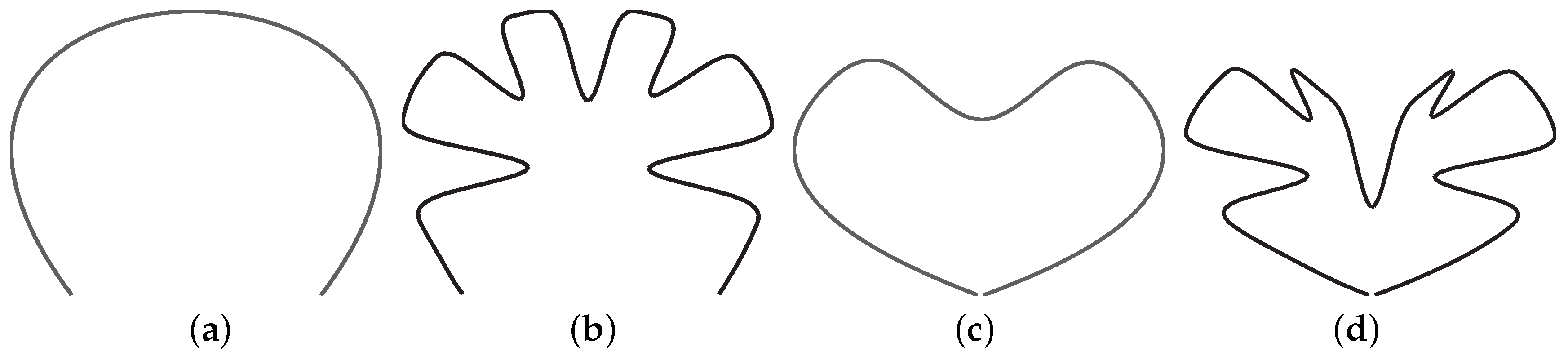
Figure 6 shows an example of multilevel editing of a B-spline curve.
Figure 6a shows a cubic B-spline curve
at level 0 defined on the clamped knot vector
, and
Figure 6b shows the result of editing the curve at level 5, which means the displacement function
changes.
Figure 6d shows the curve at level 5 after it has been edited globally at level 0, as shown in
Figure 6c. The final curve shown in
Figure 6d confirms that the displacements
generated at level 5 (
Figure 6b) have correctly been applied to the result of globally edited the curve at level 0.
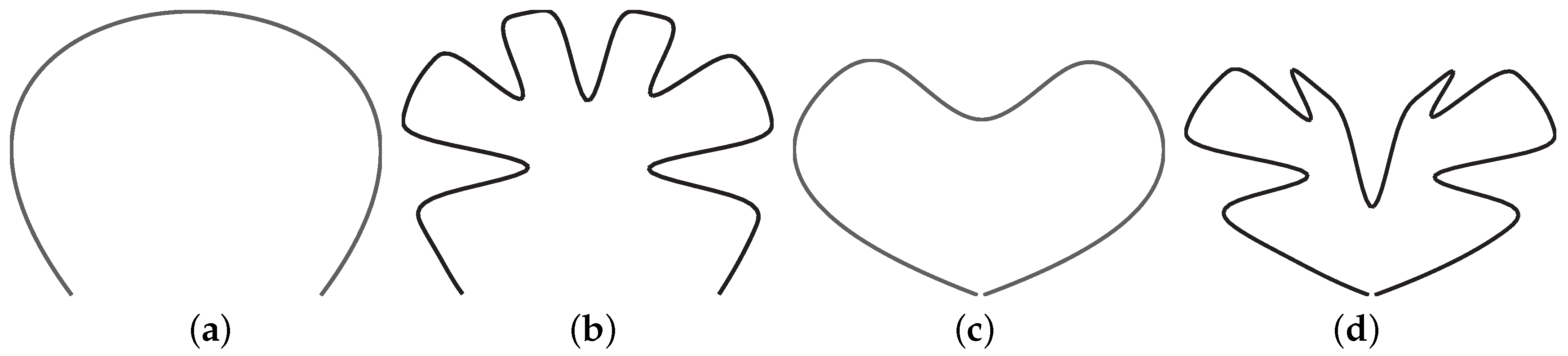
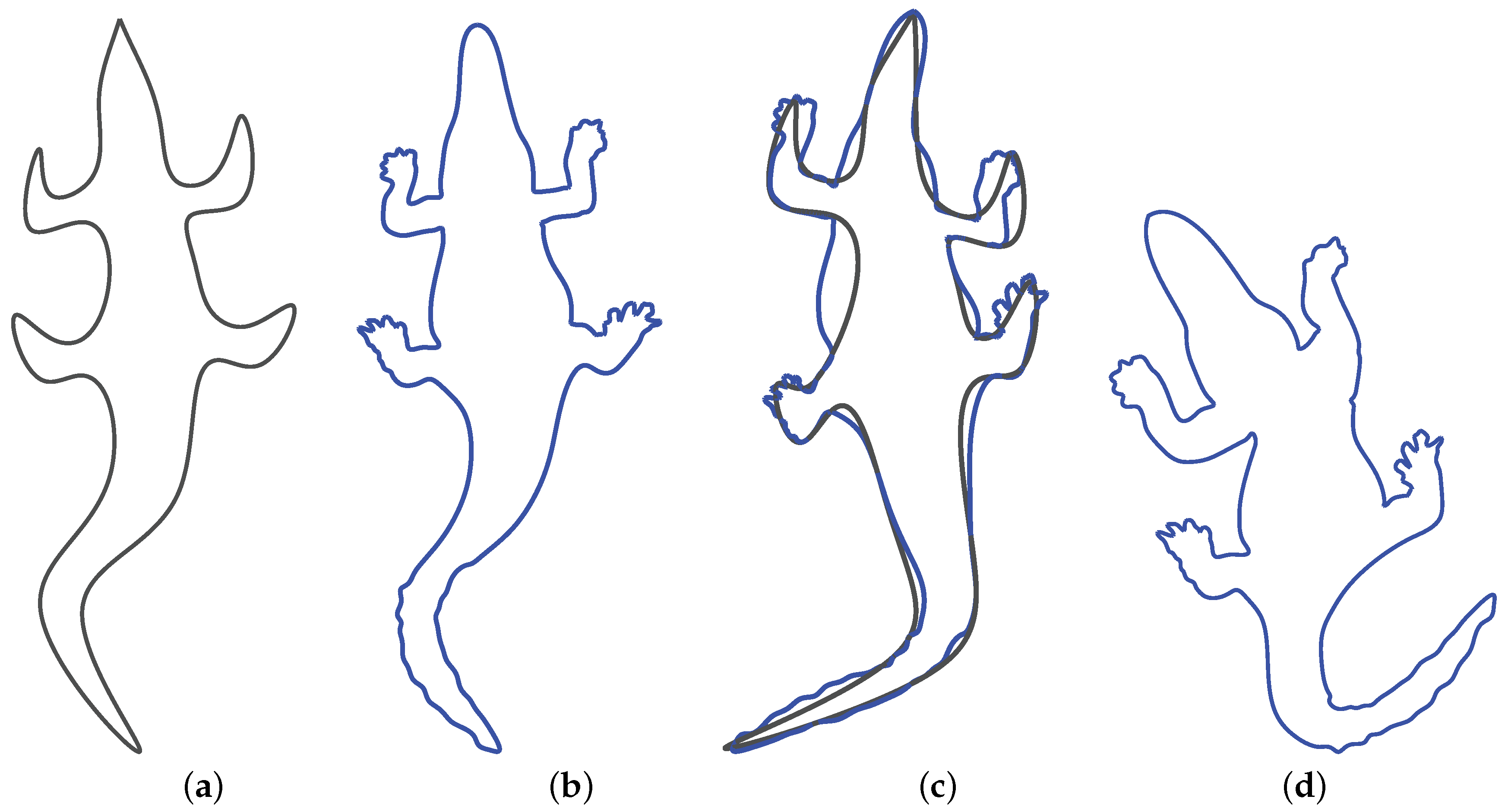
Figure 7 shows a more sophisticated example in which the initial B-spline curve (
Figure 7a) is modeled by using 30 control points and it is edited at higher levels for adding fine details of a crocodile shape in
Figure 7b.
Figure 7c,d show the results of editing the initial curve at level 0 in which we can see that fine details made at higher levels are correctly applied to editing results at level 0.
Since the displacement function
must be applied to the curve produced at the lower level
, the RMFs at the node points
should be computed efficiently. That is, the performance of our technique depends on not only the complexity of Algorithm 1 but also the computational costs for computing references frames. In this section, we analyz the computational costs for computing a RMF and a Frenet frame at a node parameter
. For this, we assume a cubic polynomial curve
, where
. The Frenet frame at a node parameter
is computed as follows:
Table 1 lists the total operation counts for computing a Frenet frame and a RMF, respectively. The detailed counting for a RMF is referred to the double reflection method [
5]. Note that a
or a division is about six times more time-consuming than a multiplication since they are approximated by a truncated series in arithmetic hardware.
Table 1 just compares the operation counts for one node parameter. Multiple node parameters at higher level would produce a huge difference of the total operation counts.
Table 2 lists the actual computation times for computing RMFs and Frenet frames with a different number of reference frames at each level of the curve in
Figure 6. The last column of
Table 2 shows that computing RMFs are 145 to 400 times faster than Frenet frames.
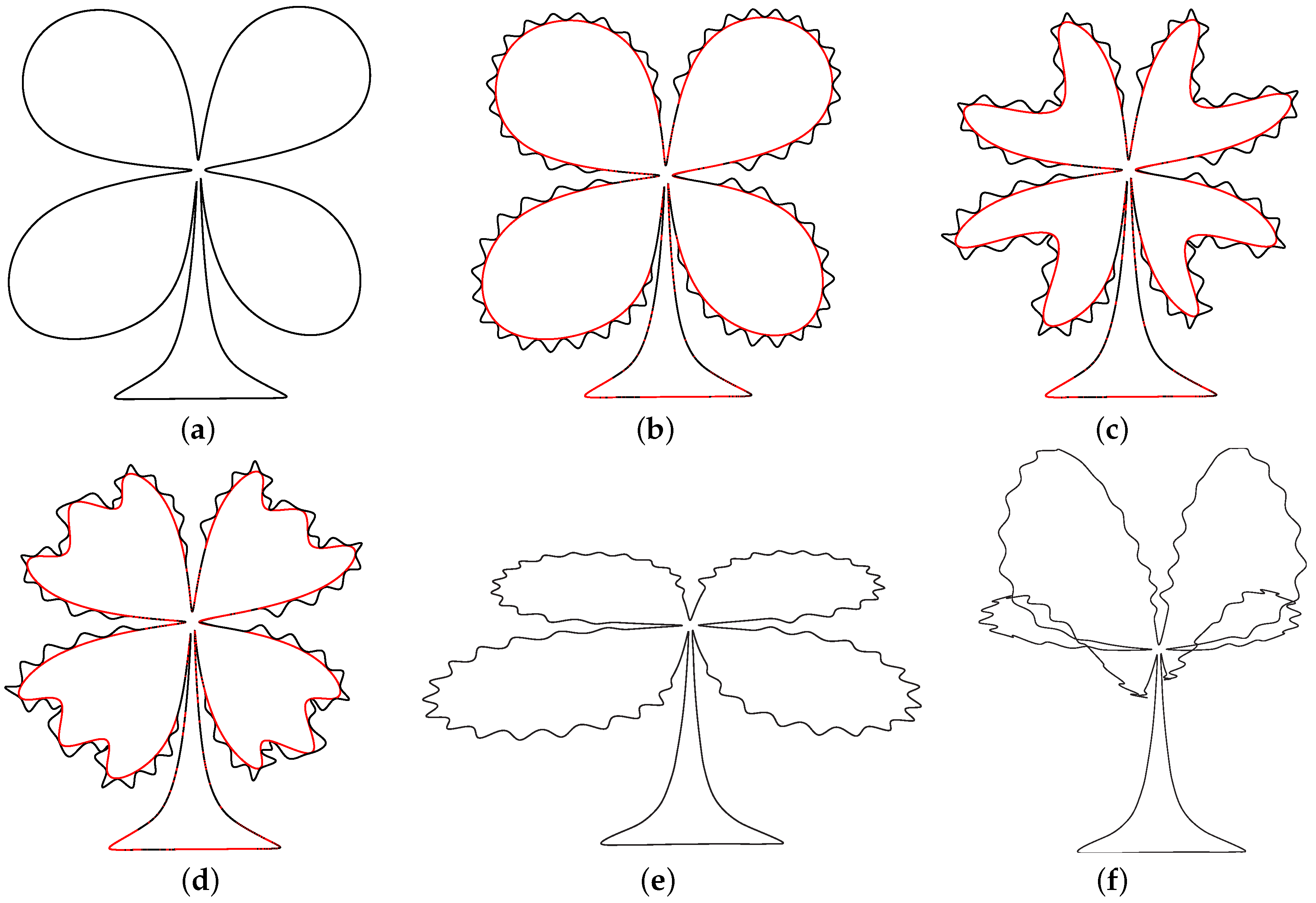
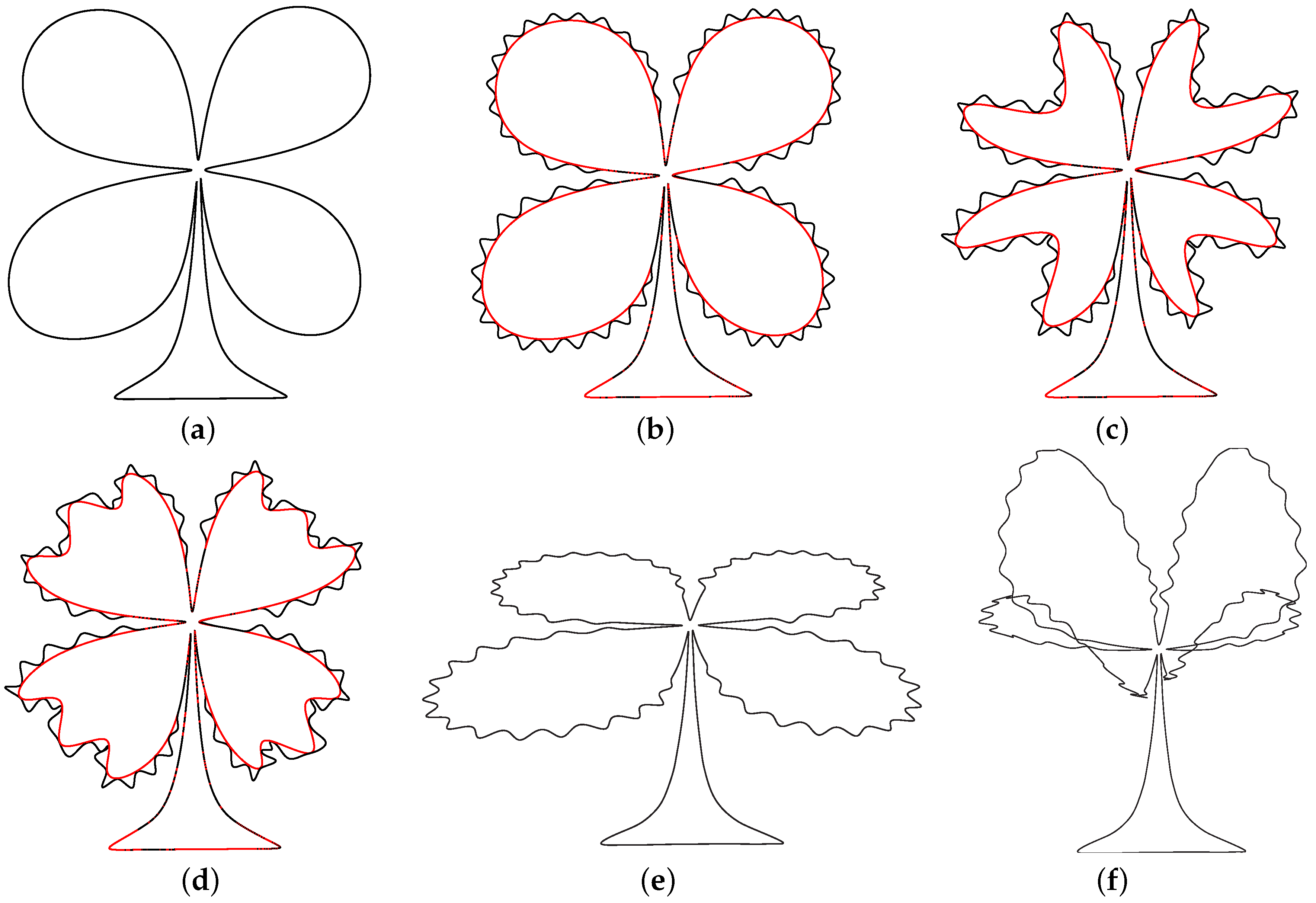
Figure 8b shows another example in which the displacement function
is applied to the curve at level 0 of
Figure 8a.
Figure 8c,d are curves (in black) edited at level 1 and level 2, maintaining the orientation of the displacement function
. The curve can easily be edited to a spatial curve as shown in
Figure 8e,f.
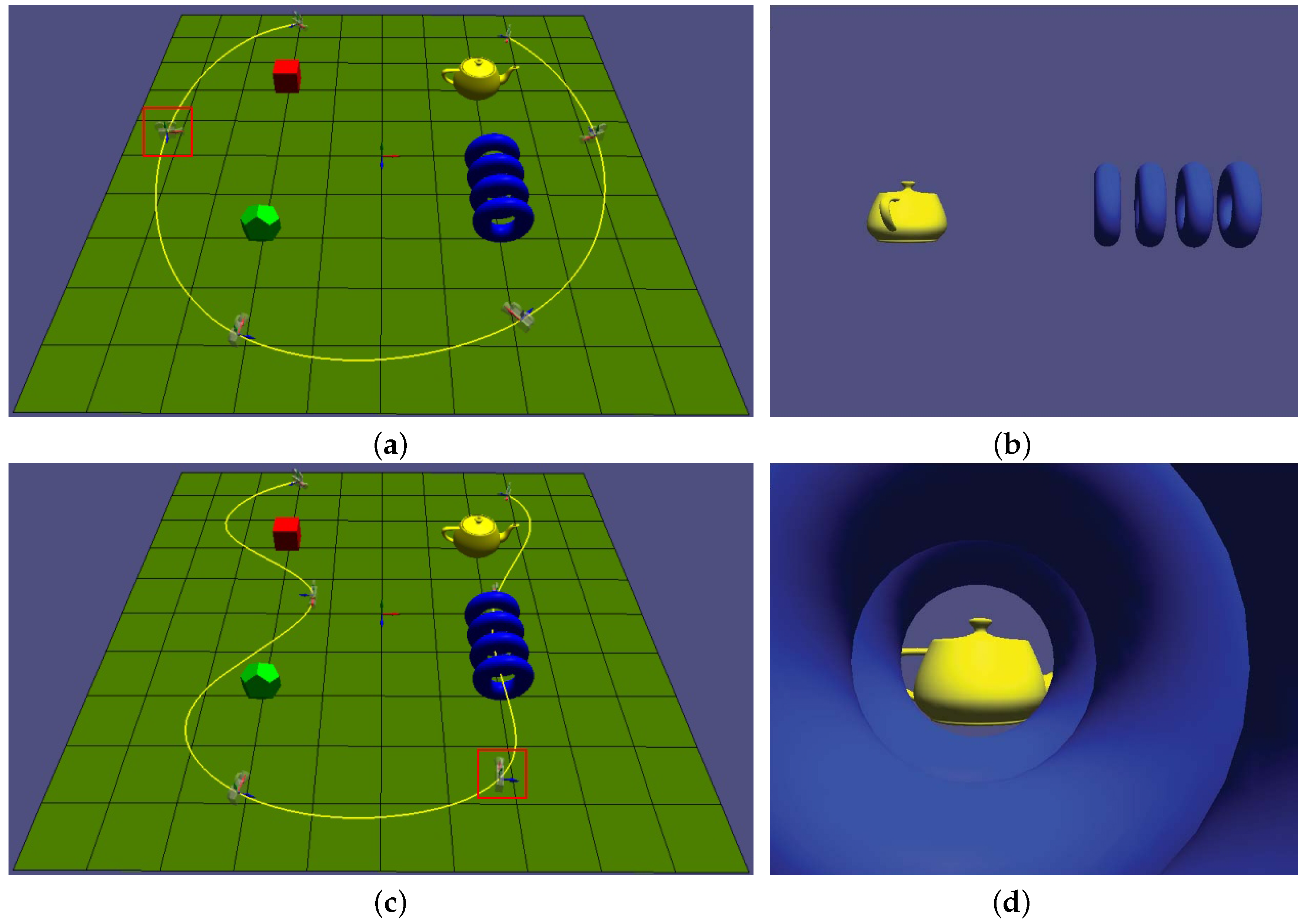
An obvious application for our multilevel curve editing technique is three-dimensional camera motion control. A camera motion is defined by a rigid-body transformation that consists of a translation and a rotation. A B-spline curve can be used as a trajectory for defining the position of camera at time u, and a quaternion curve can specify the orientation of the camera at time u. The translation matrix is determined by a point on the trajectory curve , and the rotation matrix is determined by the orientation curve . The rigid-body transformation of the camera is then readily expressed as the product . In this case, our multilevel curve editing technique enables precise modification of the trajectory and orientation curves at different levels, providing the sophisticated camera control needed for creating desired camera motion.
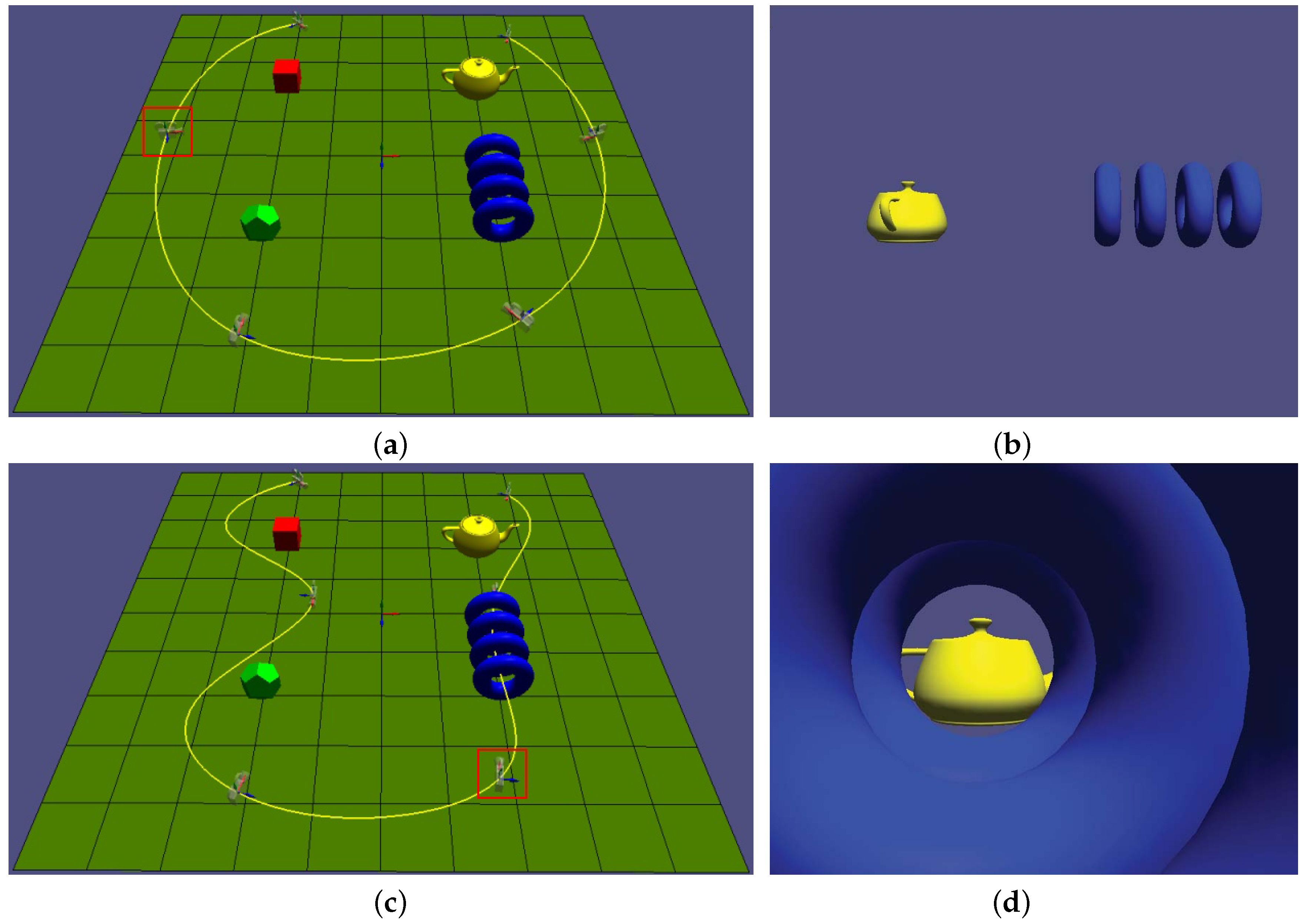
Figure 9a shows an example of camera control. The trajectory of the camera (shown in yellow) is a cubic B-spline curve with six control points.
Figure 9b shows the image captured by the camera when it is at the position marked by the red box.
Figure 9c shows detailed editing of the trajectory and orientation curves at level 2 (compare the yellow curve in
Figure 9c with that of
Figure 9a). The camera motion is edited so that it passes through the sequence of tori.
Figure 9d shows the image captured by the camera at the position marked by the red box in
Figure 9c.
Besides from 3D camera control, our technique can easily be applied to various applications making use of curve components such as modeling sweep surfaces and hierarchical editing of human motion, where trajectory curves and joint angle curves can effectively be controlled by our technique while preserving orientation of details.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}