
Comparative Analysis of the Gardner Equation in Plasma Physics Using Analytical and Neural Network Methods



Abstract
1. Introduction
2. Preliminaries
2.1. Computation of Lie Symmetry
- Define the kth-order PDE, i.e.,
- The infinitesimal generator is defined by
- Apply the kth-order extended prolongation terms:where is the total derivative operator:
- Use the prolongation into the invariance condition to obtain the determining system:
- Find the set of infinitesimals by solving the resulting determining system.
- Construct the symmetry generators via a set of infinitesimals.
- Reduce the PDE using the symmetry using the characteristic method.
- Solve the reduced differential equation via a suitable method and analyze the original equation by obtaining the solution through a transformation variable.
2.2. Series Solution Method
- Assume the solution of the differential equation for in the form of a power series:
- Compute the solution derivatives and power terms by the Cauchy product. Substitute them into the differential equation.
- For comparison, collect terms with equal powers of z and equate the coefficients to zero.
- Solve the resulting recurrence relations for the coefficients .
- If the terms converge within the specified tolerance, go to step 7. Otherwise, proceed to step 6.
- Compute additional terms using the recurrence relation.
- Output the series solution.
3. Lie Classification
3.1. Coefficients Are Constant
3.1.1. When All the Coefficients Have Constant Behavior
3.1.2. In the Absence of Perturbation
3.1.3. In the Absence of External Forces
3.1.4. In the Absence of Perturbation and External Forces
3.2. For Constant Dispersion and Perturbation
3.3. All of the Coefficients Are Equal
Arbitrary Function
3.4. All Coefficients Are Equal Except External Force
3.4.1. Arbitrary Function
3.4.2. Quadratic Nonlinearity Is Exponential Function with External Force as Constant Multiple
3.5. Absence of Quadratic Nonlinearity
3.5.1. All Coefficients Are Equal
3.5.2. With Reciprocal Decaying Pattern Along with Constant Cubic and Dissipation
3.5.3. With Different Behavior of Coefficients and Cubic and External Forces
3.6. In the Absence of Cubic Nonlinearity
3.6.1. All Coefficients Are Equal
3.6.2. All Remaining Coefficients Are Equal but with Different External Forces
Arbitrary Quadratic Nonlinearity and External Force
Quadratic Nonlinearity as Multiple of External-Force Coefficients
3.7. Optimal System
4. Reduction
4.1. Reduction of (1) via Section 3.1.1
4.2. Reduction of (1) via (14)
5. Analytical Solutions
5.1. Application to (17)
5.2. Application to (18)
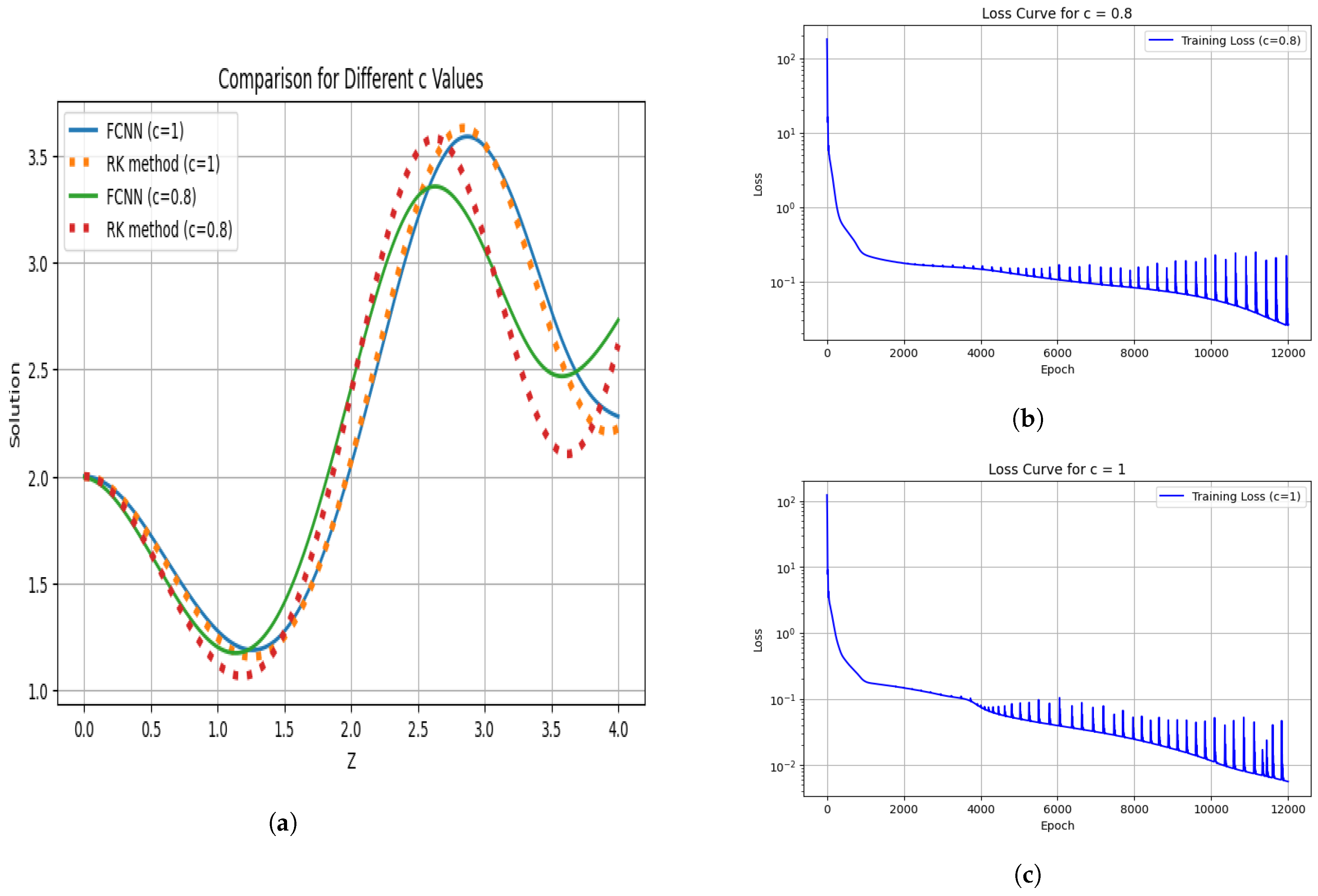
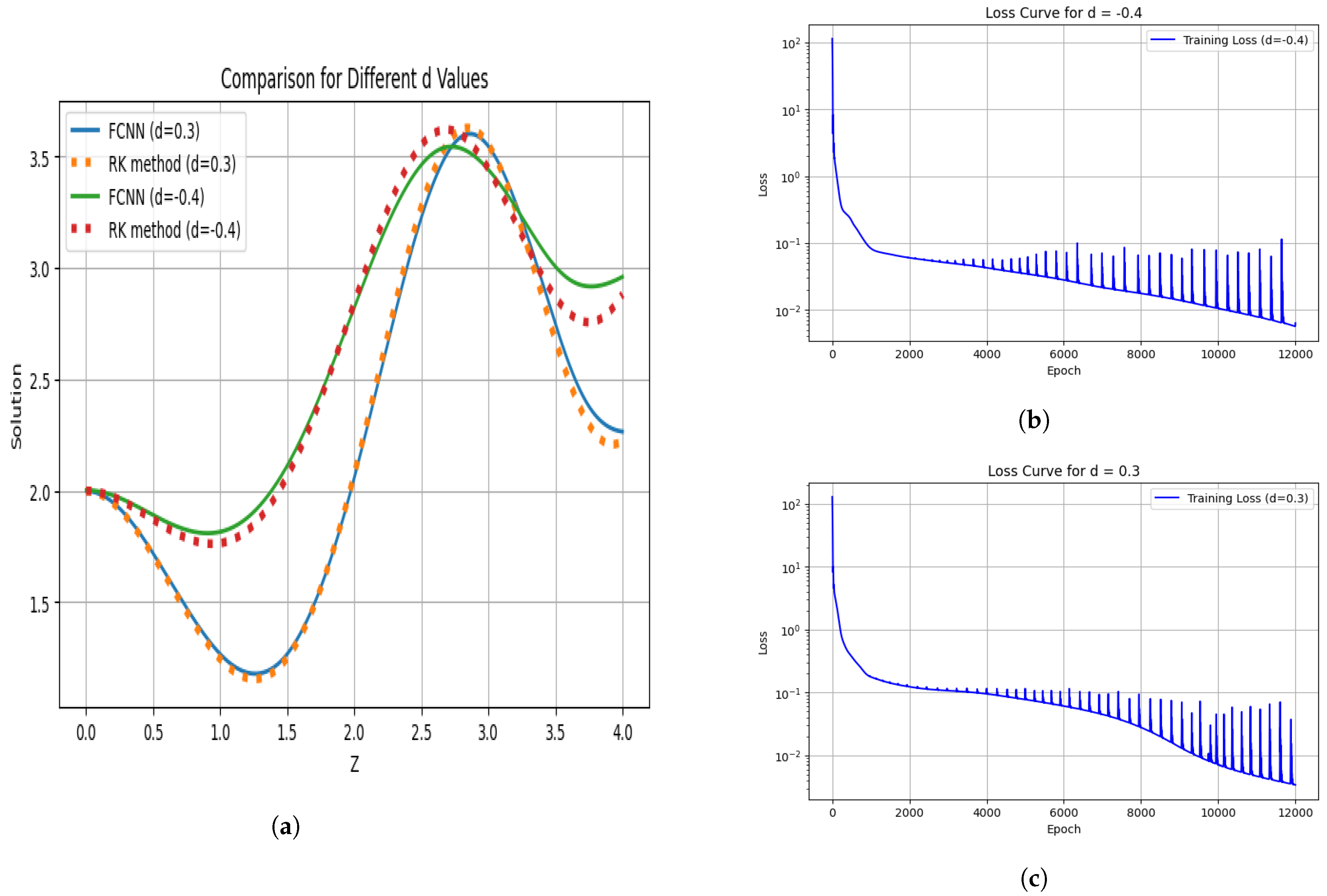
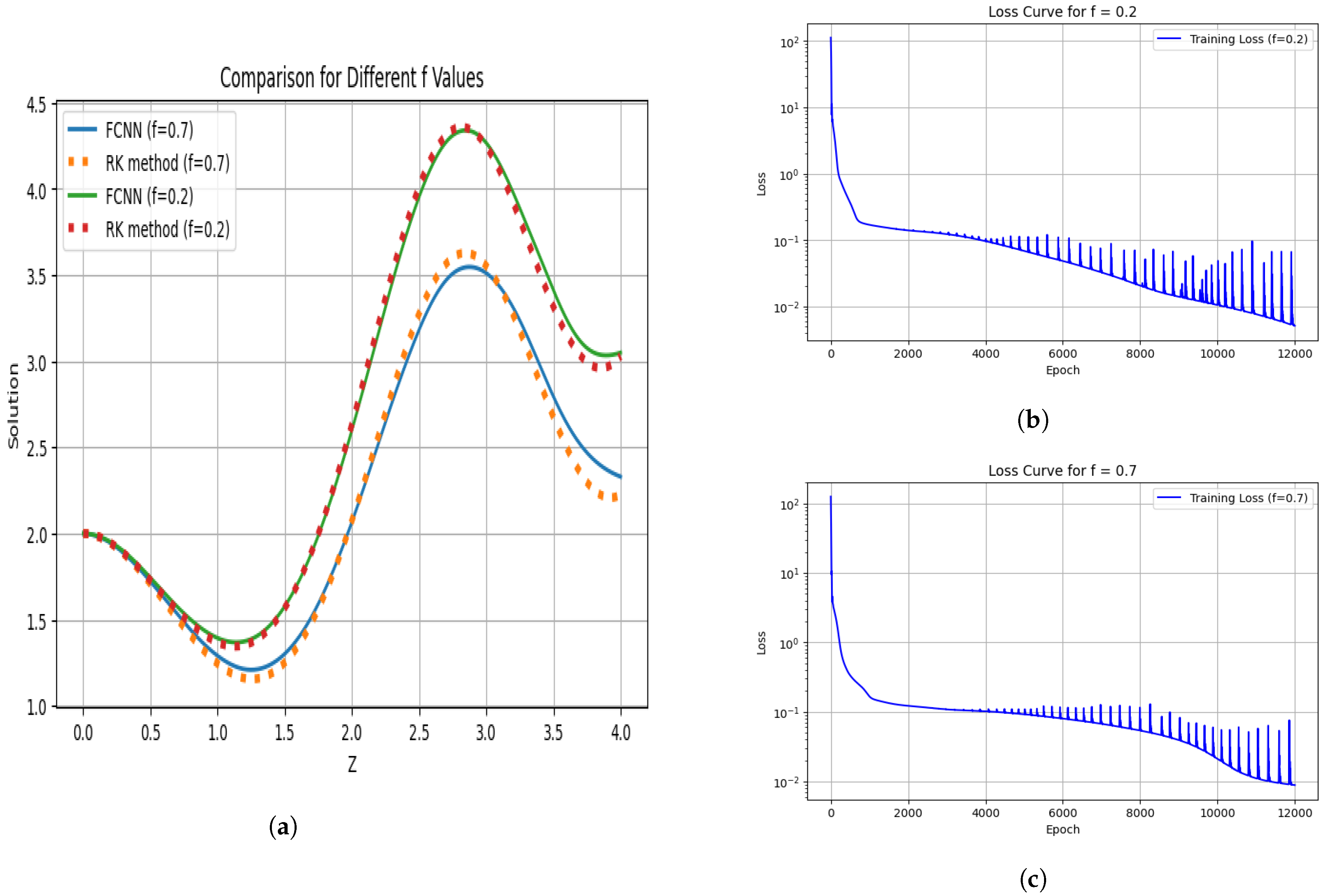
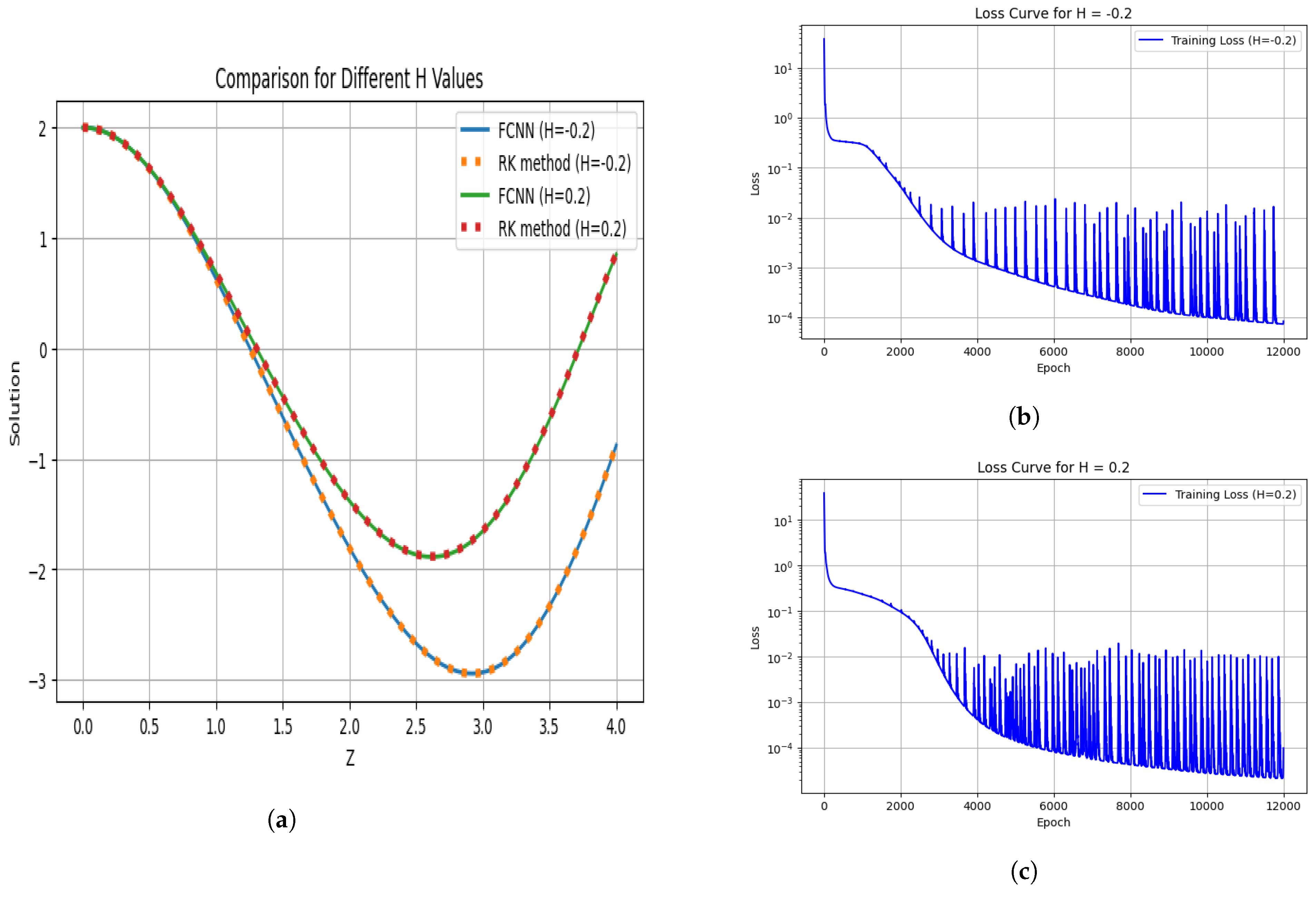
5.3. Analysis of (17) via Numerical Methods
6. Conclusions
7. Future Directions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tajima, T. Computational Plasma Physics: With Applications to Fusion and Astrophysics; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Zhou, T.Y.; Tian, B.; Shen, Y.; Gao, X.T. Auto-Bäcklund transformations and soliton solutions on the nonzero background for a (3 + 1)-dimensional Korteweg-de Vries-Calogero-Bogoyavlenskii-Schif equation in a fluid. Nonlinear Dyn. 2023, 111, 8647–8658. [Google Scholar] [CrossRef]
- Cheng, C.D.; Tian, B.; Hu, C.C.; Shen, Y. Line-rogue waves, transformed nonlinear waves and their interactions for a (3 + 1)-dimensional Korteweg-de Vries equation in a fluid. Phys. Lett. A 2023, 480, 128970. [Google Scholar] [CrossRef]
- Liu, J.G.; Zhu, W.H.; Zhou, L.; Xiong, Y.K. Multi-waves, breather wave and lump–stripe interaction solutions in a (2 + 1)-dimensional variable-coefficient Korteweg–de Vries equation. Nonlinear Dyn. 2019, 97, 2127–2134. [Google Scholar] [CrossRef]
- Hao, X.; Lou, S.Y. Higher-dimensional integrable deformations of the modified KdV equation. Commun. Theor. Phys. 2023, 75, 075002. [Google Scholar] [CrossRef]
- Gao, X.Y. Two-layer-liquid and lattice considerations through a (3 + 1)-dimensional generalized Yu-Toda-Sasa-Fukuyama system. Appl. Math. Lett. 2024, 152, 109018. [Google Scholar] [CrossRef]
- Wazwaz, A.M.; Xu, G.Q. An extended modified KdV equation and its Painlevé integrability. Nonlinear Dyn. 2016, 86, 1455–1460. [Google Scholar] [CrossRef]
- El-Monier, S.Y.; Atteya, A. Dust-acoustic Gardner solitons in cryogenic plasma with the effect of polarization in the presence of a quantizing magnetic field. Z. Naturforschung A 2021, 76, 121–130. [Google Scholar] [CrossRef]
- Jhangeer, A.; Hussain, A.; Junaid-U-Rehman, M.; Baleanu, D.; Riaz, M.B. Quasi-periodic, chaotic and travelling wave structures of modified Gardner equation. Chaos Solitons Fractals 2021, 143, 110578. [Google Scholar] [CrossRef]
- Helfrich, K.R.; Ostrovsky, L. Effects of rotation and topography on internal solitary waves governed by the rotating Gardner equation. Nonlinear Process. Geophys. 2022, 29, 207–218. [Google Scholar] [CrossRef]
- Liu, H.D.; Tian, B.; Feng, S.P.; Chen, Y.Q.; Zhou, T.Y. Integrability, bilinearization, Bäcklund transformations and solutions for a generalized variable-coefficient Gardner equation with an external-force term in a fluid or plasma. Nonlinear Dyn. 2024, 112, 12345–12359. [Google Scholar] [CrossRef]
- Liu, Y.; Gao, Y.T.; Sun, Z.Y.; Yu, X. Multi-soliton solutions of the forced variable-coefficient extended Korteweg–de Vries equation arisen in fluid dynamics of internal solitary waves. Nonlinear Dyn. 2011, 66, 575–587. [Google Scholar] [CrossRef]
- Liu, Y.P.; Gao, Y.T.; Wei, G.M. Integrable aspects and soliton interaction for a generalized inhomogeneous Gardner model with external force in plasmas and fluids. Phys. Rev. E—Stat. Nonlinear Soft Matter Phys. 2013, 88, 053204. [Google Scholar] [CrossRef]
- Liu, H.D.; Tian, B.; Chen, Y.Q.; Cheng, C.D.; Gao, X.T. N-soliton, H th-order breather, hybrid and multi-pole solutions for a generalized variable-coefficient Gardner equation with an external force in a plasma or fluid. Nonlinear Dyn. 2025, 113, 3655–3672. [Google Scholar] [CrossRef]
- Meng, Q.; He, B.; Liu, W. Exact similarity and traveling wave solutions to an integrable evolution equation for surface waves in deep water. Nonlinear Dyn. 2018, 92, 827–842. [Google Scholar] [CrossRef]
- Liu, H.; Bai, C.L.; Xin, X.; Zhang, L. A novel Lie group classification method for generalized cylindrical KdV type of equation: Exact solutions and conservation laws. J. Math. Fluid Mech. 2019, 21, 55. [Google Scholar] [CrossRef]
- Olver, P.J. Applications of Lie Groups to Differential Equations; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1993; Volume 107. [Google Scholar]
- Bluman, G.W. Applications of Symmetry Methods to Partial Differential Equations; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Ovsiannikov, L.V.E. Group Analysis of Differential Equations; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Bluman, G.W.; Kumei, S. Symmetries and Differential Equations; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 81. [Google Scholar]
- Ibragimov, N.H. Selected Works; ALGA Publications BTH: Karlskrona, Sweden, 2006; Volume II. [Google Scholar]
- Popovych, R.O.; Vaneeva, O.O. More common errors in finding exact solutions of nonlinear differential equations: Part I. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 3887–3899. [Google Scholar] [CrossRef]
- de la Rosa, R.; Gandarias, M.L.; Bruzón, M.S. On symmetries and conservation laws of a Gardner equation involving arbitrary functions. Appl. Math. Comput. 2016, 290, 125–134. [Google Scholar]
- Vaneeva, O.; Kuriksha, O.; Sophocleous, C. Enhanced group classification of Gardner equations with time-dependent coefficients. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 1243–1251. [Google Scholar] [CrossRef]
- Abohamer, M.K.; Awrejcewicz, J.; Amer, T.S. Modeling of the vibration and stability of a dynamical system coupled with an energy harvesting device. Alex. Eng. J. 2023, 63, 377–397. [Google Scholar] [CrossRef]
- Zhao, Y.; Jiang, C.; Vega, M.A.; Todd, M.D.; Hu, Z. Surrogate modeling of nonlinear dynamic systems: A comparative study. J. Comput. Inf. Sci. Eng. 2023, 23, 011001. [Google Scholar] [CrossRef]
- Bukhari, A.H.; Sulaiman, M.; Raja, M.A.Z.; Islam, S.; Shoaib, M.; Kumam, P. Design of a hybrid NAR-RBFs neural network for nonlinear dusty plasma system. Alex. Eng. J. 2020, 59, 3325–3345. [Google Scholar] [CrossRef]
- Ul Rahman, J.; Makhdoom, F.; Ali, A.; Danish, S. Mathematical modeling and simulation of biophysics systems using neural network. Int. J. Mod. Phys. B 2024, 38, 2450066. [Google Scholar] [CrossRef]
- Ul Rahman, J.; Danish, S.; Lu, D. Deep neural network-based simulation of Sel’kov model in glycolysis: A comprehensive analysis. Mathematics 2023, 11, 3216. [Google Scholar] [CrossRef]
- Onder, I.; Secer, A.; Ozisik, M.; Bayram, M. On the optical soliton solutions of Kundu–Mukherjee–Naskar equation via two different analytical methods. Optik 2022, 257, 168761. [Google Scholar] [CrossRef]
- Goswami, A.; Singh, J.; Kumar, D.; Gupta, S. An efficient analytical technique for fractional partial differential equations occurring in ion acoustic waves in plasma. J. Ocean. Eng. Sci. 2019, 4, 85–99. [Google Scholar] [CrossRef]
- Iqbal, N.; Chughtai, M.T.; Ullah, R. Fractional study of the non-linear Burgers’ equations via a semi-analytical technique. Fractal Fract. 2023, 7, 103. [Google Scholar] [CrossRef]
- Mustafa, I.; Hashemi, M.S.; Aliyu, A. Exact solutions and conservation laws of the bogoyavlenskii equation. Acta Phys. Pol. A 2018, 133, 1133–1137. [Google Scholar] [CrossRef]
- Inc, M.; Yusuf, A.; Aliyu, A.I.; Baleanu, D. Lie symmetry analysis and explicit solutions for the time fractional generalized Burgers–Huxley equation. Opt. Quantum Electron. 2018, 50, 94. [Google Scholar] [CrossRef]
- Huang, Y.; Sun, S.; Duan, X.; Chen, Z. A study on deep neural networks framework. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2016; pp. 1519–1522. [Google Scholar]
- Madhiarasan, M.; Louzazni, M. Analysis of artificial neural network: Architecture, types, and forecasting applications. J. Electr. Comput. Eng. 2022, 2022, 5416722. [Google Scholar] [CrossRef]
- Tuan, N.M.; Kooprasert, S.; Sirisubtawee, S.; Meesad, P. The bilinear neural network method for solving Benney-Luke equation. Partial. Differ. Equ. Appl. Math. 2024, 10, 100682. [Google Scholar] [CrossRef]
- Zhang, R.F.; Li, M.C. Bilinear residual network method for solving the exactly explicit solutions of nonlinear evolution equations. Nonlinear Dyn. 2022, 108, 521–531. [Google Scholar] [CrossRef]
- Xie, X.R.; Zhang, R.F. Neural network-based symbolic calculation approach for solving the Korteweg–de Vries equation. Chaos Solitons Fractals 2025, 194, 116232. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Kumar, R.; Kumar, A.; Kumar, A. Dynamic Behavior of Coupled mKdV–Calogero–Bogoyavlenskii–Schiff Equations in Fluid Dynamics. Differ. Equ. Dyn. Syst. 2025, 1–20. [Google Scholar] [CrossRef]
- Tanwar, D.V.; Kumar, R. Kinks and soliton solutions to the coupled Burgers equation by Lie symmetry approach. Phys. Scr. 2024, 99, 075223. [Google Scholar] [CrossRef]
- Kumar, R.; Pandey, K.S.; Yadav, S.K.; Kumar, A. Some more variety of analytical solutions to (2+1)-Bogoyavlensky-Konopelchenko equation. Phys. Scr. 2024, 99, 045240. [Google Scholar] [CrossRef]
- Raza, A.; Mahomed, F.M.; Zaman, F.D.; Kara, A.H. Optimal system and classification of invariant solutions of nonlinear class of wave equations and their conservation laws. J. Math. Anal. Appl. 2022, 505, 125615. [Google Scholar] [CrossRef]
- Winkler, D.A.; Le, T.C. Performance of deep and shallow neural networks, the universal approximation theorem, activity cliffs, and QSAR. Mol. Inform. 2017, 36, 1600118. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0 | 0 | 0 | |
| 0 | 0 | ||
| 0 | 0 |
| 0 | 0 | 0 | |
| 0 | 0 | ||
| 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Majeed, Z.; Jhangeer, A.; Mahomed, F.M.; Almusawa, H.; Zaman, F.D. Comparative Analysis of the Gardner Equation in Plasma Physics Using Analytical and Neural Network Methods. Symmetry 2025, 17, 1218. https://doi.org/10.3390/sym17081218
Majeed Z, Jhangeer A, Mahomed FM, Almusawa H, Zaman FD. Comparative Analysis of the Gardner Equation in Plasma Physics Using Analytical and Neural Network Methods. Symmetry. 2025; 17(8):1218. https://doi.org/10.3390/sym17081218
Chicago/Turabian StyleMajeed, Zain, Adil Jhangeer, F. M. Mahomed, Hassan Almusawa, and F. D. Zaman. 2025. "Comparative Analysis of the Gardner Equation in Plasma Physics Using Analytical and Neural Network Methods" Symmetry 17, no. 8: 1218. https://doi.org/10.3390/sym17081218
APA StyleMajeed, Z., Jhangeer, A., Mahomed, F. M., Almusawa, H., & Zaman, F. D. (2025). Comparative Analysis of the Gardner Equation in Plasma Physics Using Analytical and Neural Network Methods. Symmetry, 17(8), 1218. https://doi.org/10.3390/sym17081218