
A Dynamic Shortest Travel Time Path Planning Algorithm with an Overtaking Function Based on VANET


Abstract
1. Introduction
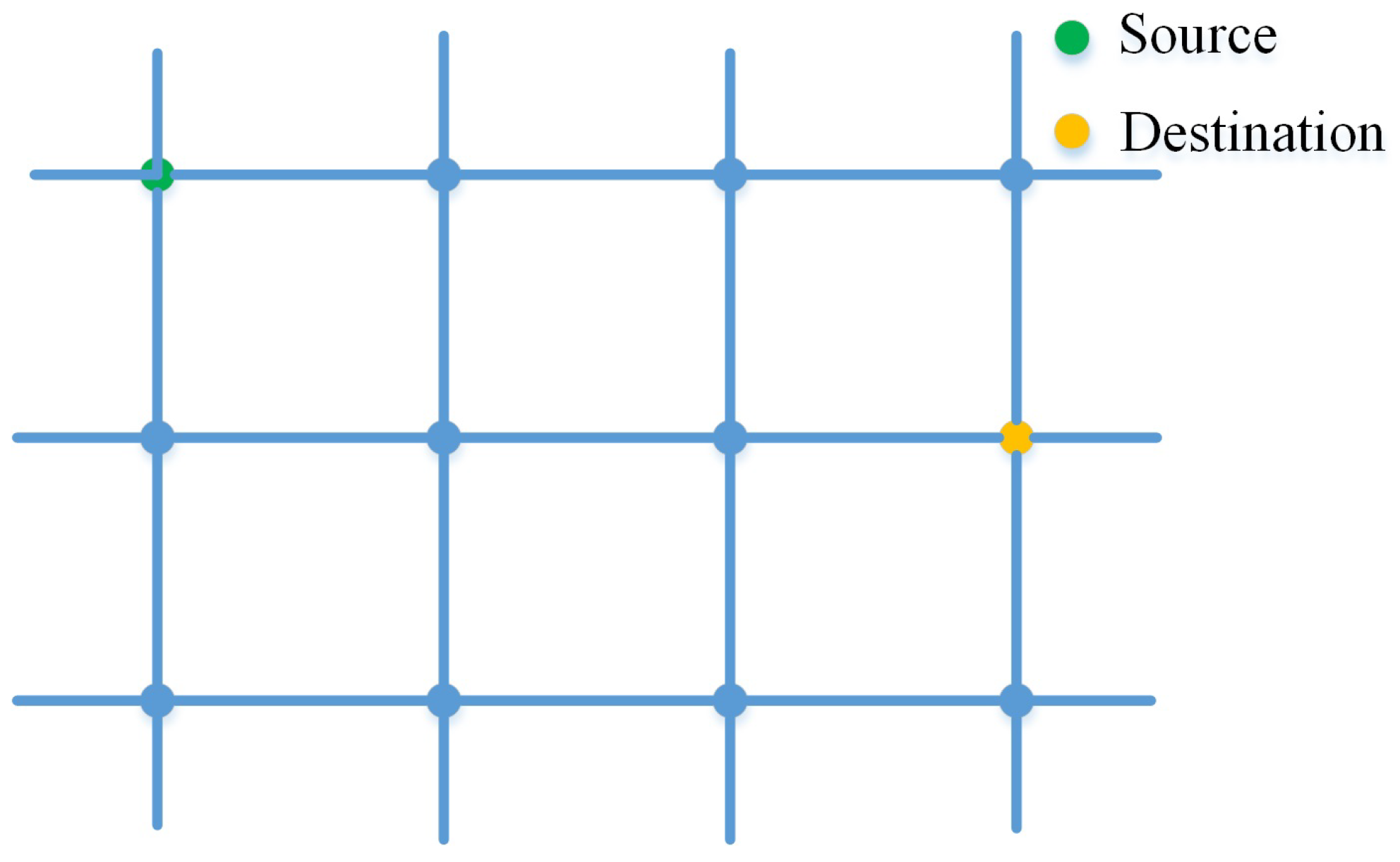
- Path planning: At a certain distance before each intersection, the onboard unit obtains information about the speed and position of vehicles on each road segment through V2I and V2V communication. We estimate the travel time for each segment and calculate the shortest time path to the destination using the improved Dijkstra algorithm. This path is then used as the driving route for the target vehicle.
- Overtaking planning: Within a certain range on each road segment, when the target vehicle is surrounded by slower vehicles, the V2V communication is used to transmit speed change information to the slower vehicles, creating enough space for the high-speed vehicle to change lanes and overtake.
2. Related Work
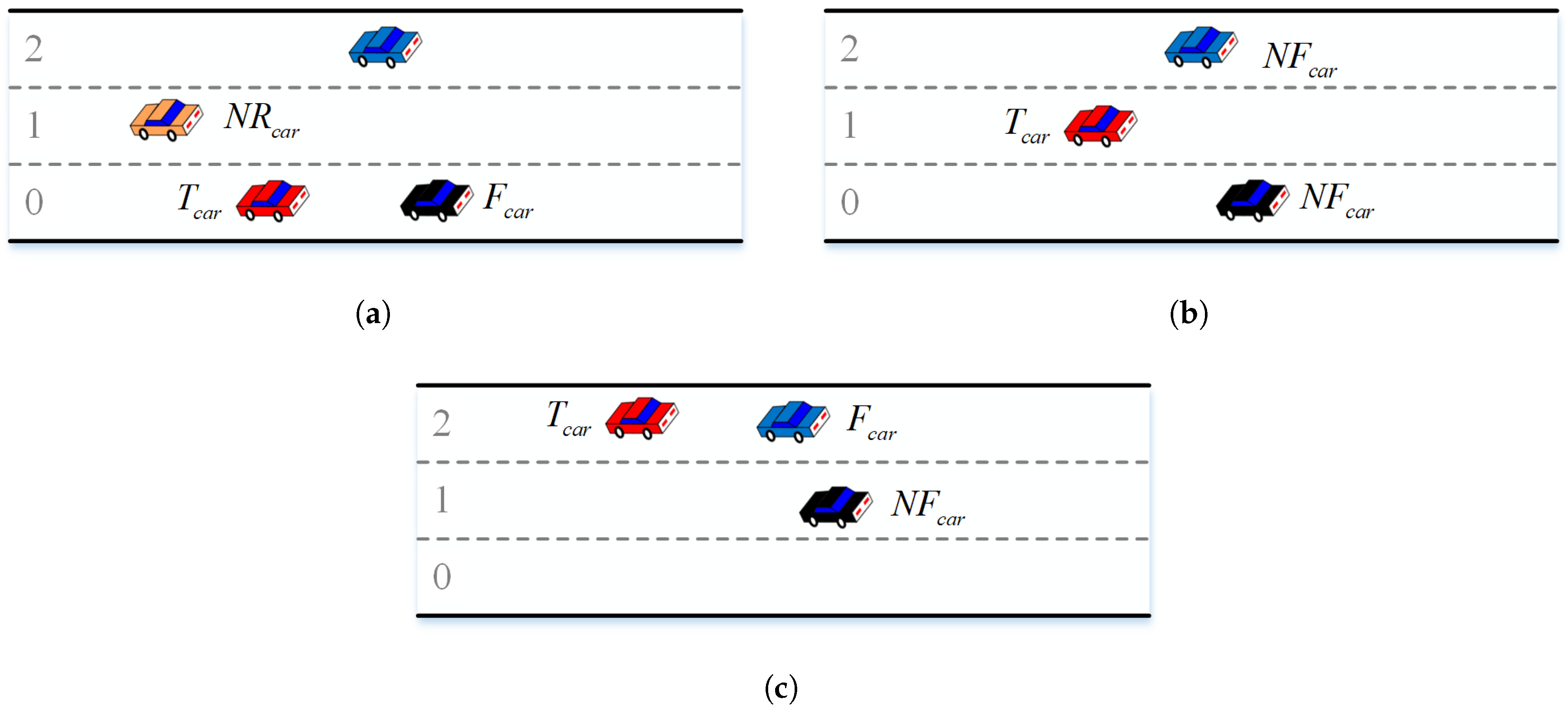
- As far as we know, few studies take into account the target vehicle becoming stuck in a deadlock caused by surrounding vehicles, especially by the rear vehicles in the adjacent lane during a lane change. Escaping from deadlocked states can cause significant travel delays, so we propose an overtaking algorithm to ensure that the target vehicle travels with the shortest possible travel time and avoids becoming stuck in deadlocked states. We use V2V communication to negotiate with other vehicles, allowing low-speed vehicles to provide enough distance for the target vehicle to execute lane changes and overtaking maneuvers.
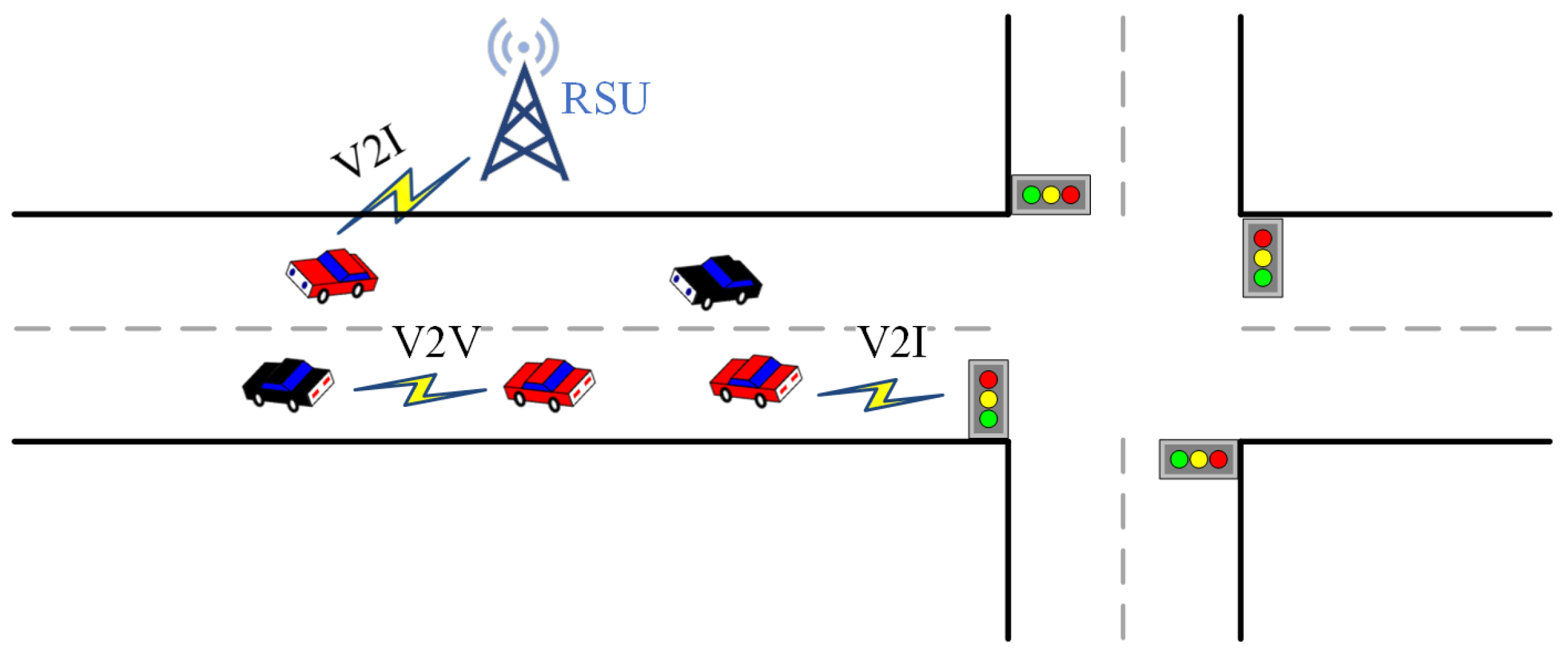
- We assume that the speed and position information of each vehicle on the road can be obtained through V2I and V2V communications in VANET [24,25,26,27]. Based on the real-time road traffic information, we categorize each road segment around the intersection into congested and non-congested segments. So, the estimation of travel time includes the time spent in both congested and non-congested segments, respectively. We provide a detailed method for estimating the travel time for each road segment and then derive the total travel time for the target vehicle.
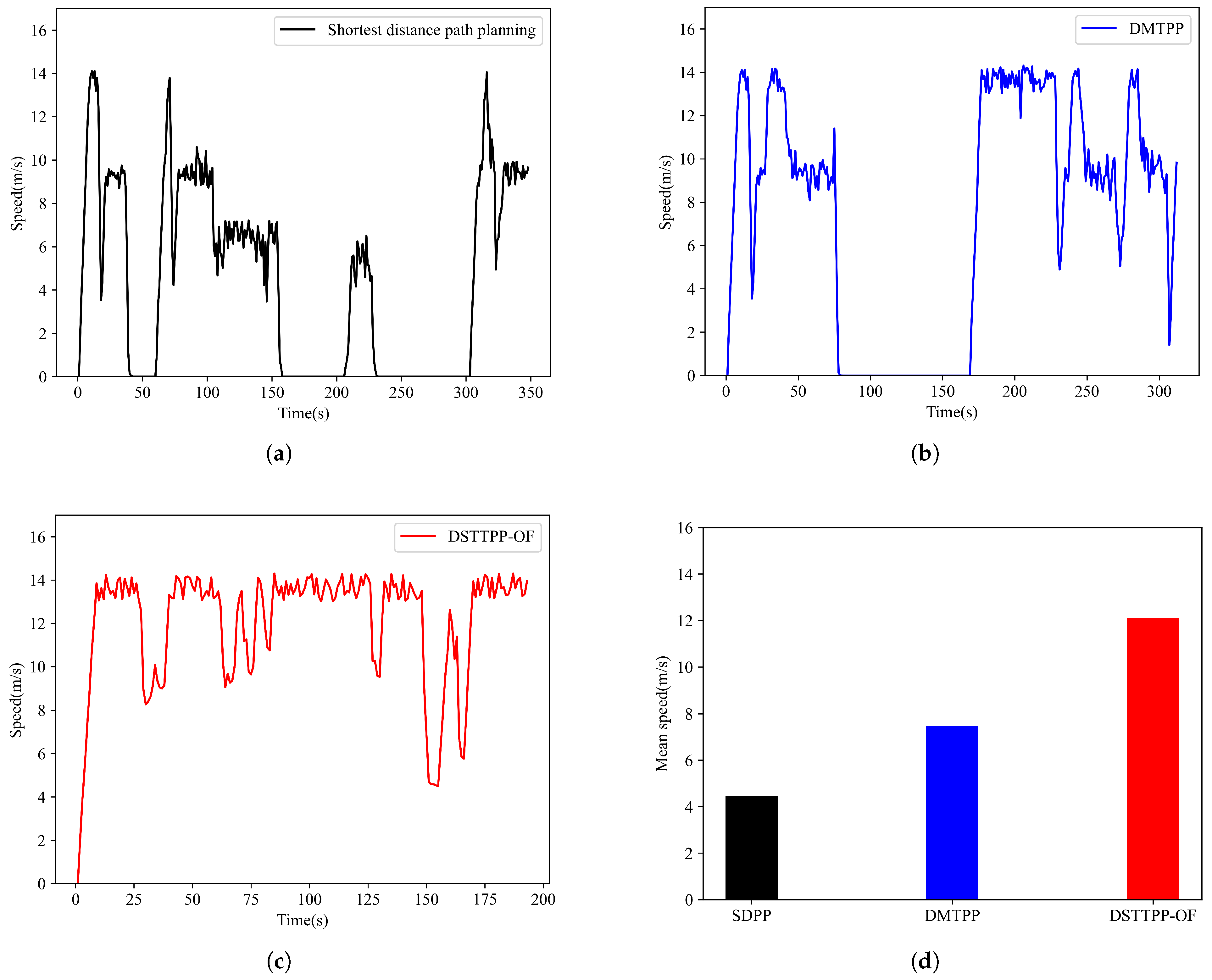
- Considering the influence of surrounding vehicles, we propose a dynamic shortest travel time path planning algorithm with an overtaking function (DSTTPP-OF). The onboard terminal of the target vehicle obtains estimated travel times for each road segment and, prior to reaching each intersection, employs the Dijkstra algorithm to compute shorter travel time routes to the destination. The proposed DSTTPP-OF performs much better than the other algorithms, ensuring that the target vehicle arrives at its destination in the shortest possible time through a smoother driving journey.
3. Dynamic Shortest Travel Time Path Planning Algorithm with an Overtaking Function
3.1. Road Network Model
3.2. Estimation of Travel Time
3.3. Dynamic Shortest Travel Time Path Planning with an Overtaking Function
| Algorithm 1 Dynamic shortest travel time route based on the improved Dijkstra |
|
3.4. Overtaking Planning
| Algorithm 2 Obtain IDs of surrounding vehicles |
|
| Algorithm 3 Overtaking data for a 3-lane case |
|
4. Simulation Results and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| VANET | vehicular ad hoc network |
| V2V | vehicle-to-vehicle |
| V2I | vehicle-to-infrastructure |
| I2I | infrastructure-to-infrastructure |
| OBU | on board unit |
| RSU | roadside unit |
| ITS | intelligent transportation system |
| SDPP | shortest distance path planning |
| DMTPP | dynamic minimum time path planning |
| DSTTPP-OF | dynamic shortest travel time path planning algorithm with an overtaking function |
References
- National Bureau of Statistics of China. Available online: https://data.stats.gov.cn/easyquery.htm?cn=C01 (accessed on 13 January 2025).
- Cao, Z.; Guo, H.; Zhang, J.; Niyato, D.; Fastenrath, U. Finding the Shortest Path in Stochastic Vehicle Routing: A Cardinality Minimization Approach. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1688–1702. [Google Scholar] [CrossRef]
- Wu, G.; Dong, C.; Li, A.; Zhang, L. A Review on Multi-Channel MAC Mechanism in Vehicular Ad Hoc Networks. Commun. Technol. 2018, 51, 1491–1496. [Google Scholar]
- Benkirane, S.; Guezzaz, A.; Azrour, M.; Gardezi, A.A.; Ahmad, S.; Sayed, A.E.; Naseer, S.; Shafiq, M. Adapted Speed System in a Road Bend Situation in VANET Environment. Comput. Mater. Contin. 2022, 74, 3781–3794. [Google Scholar] [CrossRef]
- Xu, L.; Duan, Z.; Zhang, Q. Matrix Solution for the Shortest Path Problem. Math. Pract. Theory 2018, 48, 178–183. [Google Scholar]
- Guo, C.; Li, D.; Zhang, G.; Zhai, M. Real-Time Path Planning in Urban Area via VANET-Assisted Traffic Information Sharing. IEEE Trans. Veh. Technol. 2018, 67, 5635–5649. [Google Scholar] [CrossRef]
- Yu, L.; Jiang, H.; Hua, L. Anti-congestion route planning scheme based on Dijkstra algorithm for automatic valet parking system. Appl. Sci. 2019, 9, 5016. [Google Scholar] [CrossRef]
- Typaldos, P.; Papamichail, I.; Papageorgiou, M. Minimization of Fuel Consumption for Vehicle Trajectories. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1716–1727. [Google Scholar] [CrossRef]
- Wen, L.; Çatay, B.; Eglese, R. Finding a minimum cost path between a pair of nodes in a time-varying road network with a congestion charge. Eur. J. Oper. Res. 2014, 236, 915–923. [Google Scholar] [CrossRef]
- Hu, L.; Zhong, Y.; Hao, W.; Moghimi, B.; Huang, J.; Zhang, X. Optimal Route Algorithm Considering Traffic Light and Energy Consumption. IEEE Access 2018, 6, 59695–59704. [Google Scholar] [CrossRef]
- Schoenberg, S.; Dressler, F. Reducing Waiting Times at Charging Stations with Adaptive Electric Vehicle Route Planning. IEEE Trans. Veh. Technol. 2023, 8, 95–107. [Google Scholar] [CrossRef]
- Li, Z.; Kolmanovsky, I.V.; Atkins, E.M.; Lu, J.; Filev, D.P.; Bai, Y. Road Disturbance Estimation and Cloud-Aided Comfort-Based Route Planning. IEEE Trans. Cybern. 2017, 47, 3879–3891. [Google Scholar] [CrossRef] [PubMed]
- Zhi, L.; Zhou, X.; Zhao, J. Vehicle Routing for Dynamic Road Network Based on Travel Time Reliability. IEEE Access 2020, 8, 190596–190604. [Google Scholar] [CrossRef]
- Peng, N.; Xi, Y.; Rao, J.; Ma, X.; Ren, F. Urban Multiple Route Planning Model Using Dynamic Programming in Reinforcement Learning. IEEE Trans. Intell. Transp. Syst. 2022, 23, 8037–8047. [Google Scholar] [CrossRef]
- Chavhan, S.; Gupta, D.; Nagaraju, C.; Rammohan, A.; Khanna, A.; Rodrigues, J.J.P.C. An Efficient Context-Aware Vehicle Incidents Route Service Management for Intelligent Transport System. IEEE Syst. J. 2022, 16, 487–498. [Google Scholar] [CrossRef]
- Santamaria, A.F.; Fazio, P.; Raimondo, P.; Tropea, M.; Rango, F.D. A New Distributed Predictive Congestion Aware Re-Routing Algorithm for CO2 Emissions Reduction. IEEE Trans. Veh. Technol. 2019, 68, 4419–4433. [Google Scholar] [CrossRef]
- Liu, C.; Wang, J.; Cai, W.; Zhang, Y. An Energy-Efficient Dynamic Route Optimization Algorithm for Connected and Automated Vehicles Using Velocity-Space-Time Networks. IEEE Access 2019, 7, 108866–108877. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Atiquzzaman, M.; Lorenz, P.; Baz, A.; Alhakami, H. SEARCH: An SDN-Enabled Approach for Vehicle Path-Planning. IEEE Trans. Veh. Technol. 2020, 69, 14523–14536. [Google Scholar] [CrossRef]
- Lin, Z.; Wu, K.; Shen, R.; Yu, X.; Huang, S. An Efficient and Accurate A-Star Algorithm for Autonomous Vehicle Path Planning. IEEE Trans. Veh. Technol. 2024, 73, 9003–9008. [Google Scholar] [CrossRef]
- Zhou, Z.; Kong, H.; Zhang, Q.; Wang, C. Obstacle avoidance path planning for intelligent vehicles based on improved RRT algorithm. In Proceedings of the 2023 7th CAA International Conference on Vehicular Control and Intelligence (CVCI), Changsha, China, 27–29 October 2023. [Google Scholar]
- Jin, H.; Jin, Z.; Kim, Y.G. Deep Reinforcement Learning-Based (DRLB) Optimization for Autonomous Driving Vehicle Path Planning. In Proceedings of the 2024 5th International Conference on Electronics and Sustainable Communication Systems (ICESC), Coimbatore, India, 7–9 August 2024. [Google Scholar]
- Qi, Z.; Wang, T.; Chen, J.; Narang, D.; Wang, Y.; Yang, H. Learning-Based Path Planning and Predictive Control for Autonomous Vehicles with Low-Cost Positioning. IEEE Trans. Veh. Technol. 2023, 8, 1093–1104. [Google Scholar] [CrossRef]
- Ma, Q.; Li, M.; Huang, G.; Ullah, S. Overtaking Path Planning for CAV Based on Improved Artificial Potential Field. IEEE Trans. Veh. Technol. 2024, 73, 1611–1622. [Google Scholar] [CrossRef]
- Li, S.E.; Zheng, Y.; Li, K.; Wang, L.; Zhang, H. Platoon control of connected vehicles from a networked control perspective: Literature review, component modeling, and controller synthesis. IEEE Trans. Veh. Technol. 2017. [Google Scholar] [CrossRef]
- Shi, Y.; Yu, H.; Guo, Y.; Yuan, Z. A Collaborative Merging Strategy with Lane Changing in Multilane Freeway On-Ramp Area with V2X Network. Future Internet 2021, 13, 123. [Google Scholar] [CrossRef]
- Ren, Y.; Jiang, S.; Yan, G.; Shan, H.; Lin, H.; Zhang, Z.; Wang, L.; Zheng, X.; Song, J. Analysis of mixed vehicle traffic flow at signalized intersections based on the mixed traffic agent model of autonomous manual driving connected vehicles. Lect. Notes Electr. Eng. 2022, 775, 817–830. [Google Scholar]
- Vinel, A.; Lyamin, N.; Isachenkov, P. Modeling of V2V communications for C-ITS safety applications: A CPS perspective. IEEE Commun. Lett. 2018, 22, 1600–1603. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Taguchi, S.; Yoshimura, T. Effcient Vehicle Driving on Multi-lane Roads Using Model Predictive Control under a Connected Vehicle Environment. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Republic of Korea, 28 June–1 July 2015; pp. 736–741. [Google Scholar]
- Khan, U.; Basaras, P.; Schmidt-Thieme, L.; Nanopoulos, A.; Katsaros, D. Analyzing Cooperative Lane Change Models for Connected Vehicles. In Proceedings of the 2014 International Conference on Connected Vehicles and Expo (ICCVE), Vienna, Austria, 3–7 November 2014. [Google Scholar]
- Li, S.; Song, Z. Research on Dynamic Macroscopic Section Travel Time Model. J. Wuhan Univ. Technol. 2004, 28, 24–29. [Google Scholar]
- Song, B.; Zhang, J.; Li, Q.; Liu, Q. Improved Dynamic Road Impedance Function Based on Traffic Wave Theory. J. Chongqing Jiaotong Univ. Nat. Sci. 2014, 33, 106–110. [Google Scholar]
- Ju, C.; Luo, Q.; Yan, X. Path Planning Using an Improved A-star Algorithm. In Proceedings of the 2020 11th International Conference on Prognostics and System Health Management (PHM-2020 Jinan), Jinan, China, 23–25 October 2020. [Google Scholar]
- Kim, J.; Ahn, C. Real-Time Speed Trajectory Planning for Minimum Fuel Consumption of a Ground Vehicle. IEEE Tran. Intell.Transp. Syst. 2020, 21, 2324–2338. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | Destination | Driving Path | Travel Time | Update Route |
|---|---|---|---|---|
| 170 s | ||||
| 180 s | ||||
| 95 s | none | |||
| The full path: | Total travel time: 265 s | |||
| Parameters | Value |
|---|---|
| 120 m | |
| 105 m | |
| 30 m | |
| 9 m | |
| 9 m | |
| l | 2 m |
| 5 m | |
| Maximum speed | 15 m/s |
| Maximal acceleration | 2.6 m/s2 |
| Maximum deceleration | 4.7 m/s2 |
| Car-following model | Krauss model |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Fan, C.; Wang, M.; Shen, J.; Liu, J. A Dynamic Shortest Travel Time Path Planning Algorithm with an Overtaking Function Based on VANET. Symmetry 2025, 17, 345. https://doi.org/10.3390/sym17030345
Li C, Fan C, Wang M, Shen J, Liu J. A Dynamic Shortest Travel Time Path Planning Algorithm with an Overtaking Function Based on VANET. Symmetry. 2025; 17(3):345. https://doi.org/10.3390/sym17030345
Chicago/Turabian StyleLi, Chunxiao, Changhao Fan, Mu Wang, Jiajun Shen, and Jiang Liu. 2025. "A Dynamic Shortest Travel Time Path Planning Algorithm with an Overtaking Function Based on VANET" Symmetry 17, no. 3: 345. https://doi.org/10.3390/sym17030345
APA StyleLi, C., Fan, C., Wang, M., Shen, J., & Liu, J. (2025). A Dynamic Shortest Travel Time Path Planning Algorithm with an Overtaking Function Based on VANET. Symmetry, 17(3), 345. https://doi.org/10.3390/sym17030345