5.2. Information on Orders, Vehicles, and Distribution Centers
This paper adopts the customer order information from a certain cold chain logistics enterprise on a specific day, as shown in
Table 3.
The service time
for all customer points is set to 0.5 (30 min). The vehicle identification numbers and other relevant data for the cold chain logistics distribution center are shown in
Table 4. Here, N represents the vehicle number, k represents the vehicle type (the paper considers three types of vehicles: small, medium, and large),
represents the maximum Travel Distance of Vehicle k,
represents the average travel speed of vehicle type k in each sub-region when the congestion index is 1 (i.e., smooth traffic),
represents the maximum travel distance of vehicle type k, and
represents the refrigeration fuel consumption coefficient of vehicle n (unit: L/(h ∗ kg)).
As shown in the above table, there are three types of vehicles: Small, Medium, and Large. The carbon emission correlation coefficients for different vehicle types are presented in
Table 5.
The coordinates of the distribution center are (116.3400, 40.1100). The fixed costs per unit , the unit fuel cost C2 is 7.5 yuan/L, the unit carbon emission cost C3 is 0.1528 yuan/kg, and the unit overtime penalty C4 is 500 yuan/h. The average ambient temperature is T* = 15 °C, the enterprise sets the refrigeration temperature of the vehicle compartment to T0 = 15 °C, the initial freshness of fresh products is q0 = 1, the reaction rate is v = 0.9, the activation energy of transported fresh products is E = 1200 J, and the molar gas constant is B = 22.4. The distribution center’s service start time is set to 5:00, and the service end time is 20:00.
5.3. Comparison of Solving Effects of Different Algorithms
To more conveniently demonstrate the superiority of the algorithm in this paper, the NSGA-III, NSGA-II, and MOEA/D algorithms are also employed for comparison. MOEA/D decomposes multi-objective problems into multiple single-objective optimization problems and solves them through collaborative optimization. The experimental parameters are as follows: crossover probability is set to 80%, mutation probability is 5%, maximum iteration count is 300, population size is set to 100, and the algorithm is programmed using Matlab R2016b, running on a computer with an 11th Gen Intel® Core™ i7-1165G7 @ 2.80 GHz processor and 16.0 GB of RAM.
As indicated,
Figure 9 shows the Pareto solution set front surfaces of the four algorithms after 300 iterations, presenting the two-dimensional solution sets for the optimization objectives of cost and carbon emissions. F1 represents the cost, F2 represents the carbon emissions, and F3 represents the average cargo freshness. As can be clearly seen from the figure, in terms of finding the optimal solution, the LNSNSGA3 algorithm performs the best, followed by the NSGA3 algorithm, while the NSGA2 and MOEAD algorithms perform the worst. This demonstrates that the NSGA3 algorithm applied in this paper is optimal in terms of solving performance. Additionally, by observing the two-dimensional Pareto solution set front surfaces of the four algorithms, it can be found that the solution set surface area of NSGA2 is the largest, followed by the LNSNSGA3 algorithm, and then the NSGA algorithm and the MOEAD algorithm, with the smallest solution set surface area. This indicates that the LNSNSGA3 algorithm’s solving performance is superior, or at least not inferior, to that of other algorithms in terms of both depth and breadth.
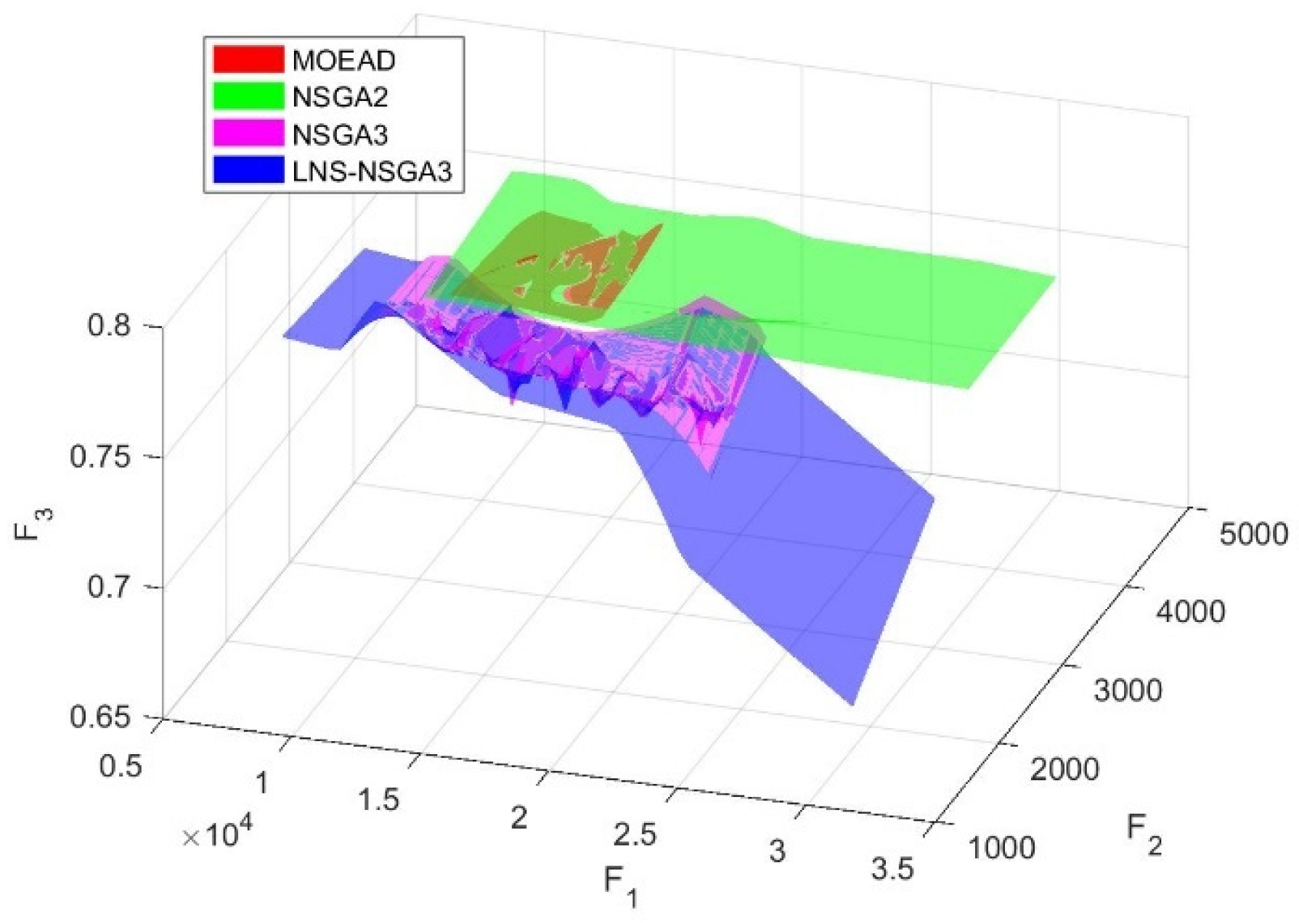
Furthermore, as shown in
Figure 10, we compare the solution set surfaces of the four algorithms on a three-dimensional plane (each dimension representing an optimization objective). It can be seen that in three-dimensional space, the solution set surfaces of the MOEAD algorithm and the NSGA2 algorithm overlap significantly, indicating that there is not much difference between the two algorithms in terms of the freshness optimization objective. The NSGA3 and LNSNSGA3 algorithms, on the other hand, have a steeper position in the three-dimensional space, indicating that these two algorithms have stronger local search capabilities.
By comparing
Table 6, we extract the best solutions after 300 iterations for the four algorithms, specifically the optimal solutions for the lowest cost, the lowest carbon emissions, and the highest freshness. From the data in the table, it can be seen that for the optimal solution targeting the lowest cost, the LNSNSGA3 algorithm is superior to the NSGA3, NSGA2, and MOEAD algorithms by 28.5%, 41.19%, and 49.79%, respectively. For the optimal solution targeting the lowest carbon emissions, it is superior by 29.3%, 53.6%, and 61.19%, respectively. For the optimal solution targeting the highest average freshness, it is superior by 5.25%, 5.48%, and 5.55%, respectively. In terms of solving time (Cput), it is superior by −16.67%, −31.25%, and −40%, respectively. In solving the three objectives, the LNSNSGA3 algorithm outperforms the other algorithms; although the solving time is higher, it amply demonstrates the superiority of the LNSNSGA3 algorithm’s solving performance.
5.4. Analysis of Vehicle Routing Optimization Results
In this section, firstly, this paper compares the vehicle routing distribution schemes before and after optimization, as shown in
Figure 11.
Figure 11 (left) shows the optimal delivery routes obtained before the optimization. It can be seen that the vehicle delivery routes before optimization are quite disordered and difficult to observe, with many intersections between different vehicle delivery routes. In contrast, the vehicle routing distribution scheme after optimization, as shown in
Figure 11 (right), clearly shows the delivery routes of different vehicles, with fewer intersections between the delivery routes of different vehicles.
Additionally, by comparing the optimization objectives before and after optimization, as shown in
Table 7, it can be seen that all the optimization objectives after optimization have been improved to some extent compared to those before optimization, indicating that the optimization method used in this paper is better in solving this problem.
Taking the optimized delivery scheme as the control group, the following text will verify the experimental conclusions of this paper through different experiments. Since this paper considers the multi-vehicle type, multi-objective vehicle delivery path optimization problem under traffic congestion, the traffic congestion coefficient (TCC) is divided into the overall traffic congestion coefficient (OTCC) and regional traffic congestion coefficient (TCC-S) for research. Among them, TCC-S has a corresponding TCC for each region, which affects the average delivery speed of vehicles, thereby affecting the delivery cost, carbon emissions, and freshness of goods. As shown in
Table 8, this paper considers the impact of OTCC on the optimization objectives, using the control group (TCC-S) vehicle delivery path scheme unchanged, adjusting OTCC from 1 to 3 with a step of 0.1, representing the transition from smooth traffic to traffic congestion.
By comparing the results in the table, it can be seen that when the OTCC is less than 1.4, the optimization objectives F1 and F2 of the experimental group are superior to the results of the control group. When the OTCC is less than 2.0, the optimization objective F3 of the experimental group is superior to the results of the control group. This indicates that compared to F3, F1 and F2 are more significantly influenced by OTCC. Meanwhile, F1 and F2 perform better within the range of 1.0 to 1.3, which might be because, in the case of low congestion, the overall traffic conditions across the network are relatively favorable, and the OTCC is more conducive to global route optimization, as it allows the utilization of a wider range of road resources. In contrast, the TCC-S might focus more on local optimization, potentially neglecting the possibility of achieving global optimization. However, within the service time window of the distribution center, the average value of TCC is obviously greater than 1.4, indicating that the TCC-S considered in this paper is more practical.
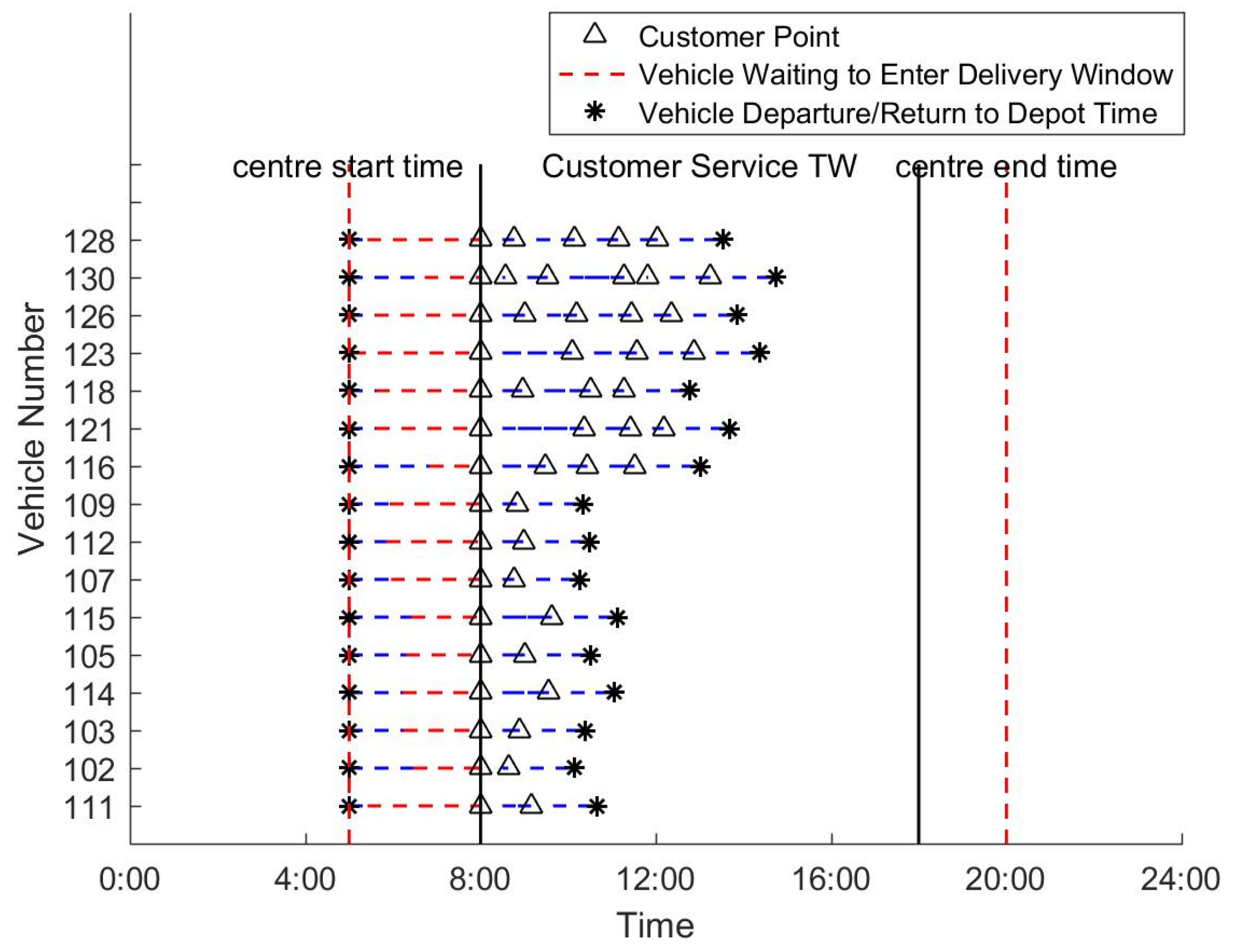
Meanwhile, according to the provisions in this paper, the time when the vehicle leaves the distribution center is the earliest service time of the distribution center, and it is required that the vehicle must serve within the customer service time window. Taking the control group as the benchmark, a time schedule diagram of the vehicle delivery path scheme is drawn.
From
Figure 12, it can be seen that after leaving the distribution center, each vehicle needs to wait for a period of time to enter the initial service time window of the customer before starting to execute the delivery task. This will lead to a decrease in the freshness of goods when delivered to customers because the freshness of goods will decrease with the length of time after leaving the distribution center and the influence of refrigeration temperature. Therefore, under the condition of a constant refrigeration temperature, a longer waiting time is not conducive to optimizing objective F3. Therefore, in order to effectively improve the result of optimization objective F3, it is assumed that the waiting time for vehicles to enter the customer service time window will be minimized, and the vehicle departure time will be dynamically adjusted. The adjusted vehicle delivery time scheme is shown in
Figure 13.
As shown in
Figure 13, after adjusting the departure time of the vehicles, each vehicle has a certain delay in leaving the distribution center, ensuring the earliest service window for customers. Meanwhile, as shown in
Table 9, the optimization results for objectives F1 and F2 slightly increased. This might be due to the fact that after the vehicles’ departure time was delayed, their departure times fell within the ‘morning rush hour,’ during which the average congestion index increased. In contrast to optimization objective F3, the optimized result improved by 5% compared to before, effectively enhancing the average freshness of goods delivered to customers, which aligned with the goal of adjusting the departure time, as mentioned earlier.
Secondly, using the control group as a reference, we analyze the impact of multi-vehicle models on vehicle distribution. First, as shown in
Table 10 below, it can be seen that the fixed cost (f1), fuel cost (f2), carbon emission cost (f3), and time penalty cost (f4) of this distribution plan are 2100, 5587.18, 261.81, and 0 yuan respectively, with a total cost (F1) of 7948.99 yuan. The total carbon emissions (F2) are 1713.40 kg, the average freshness for customers delivered by Small vehicles is approximately 0.8400, by Medium vehicles is approximately 0.8100, by Large vehicles is approximately 0.8000, and the total average freshness (F3) is 0.8315.
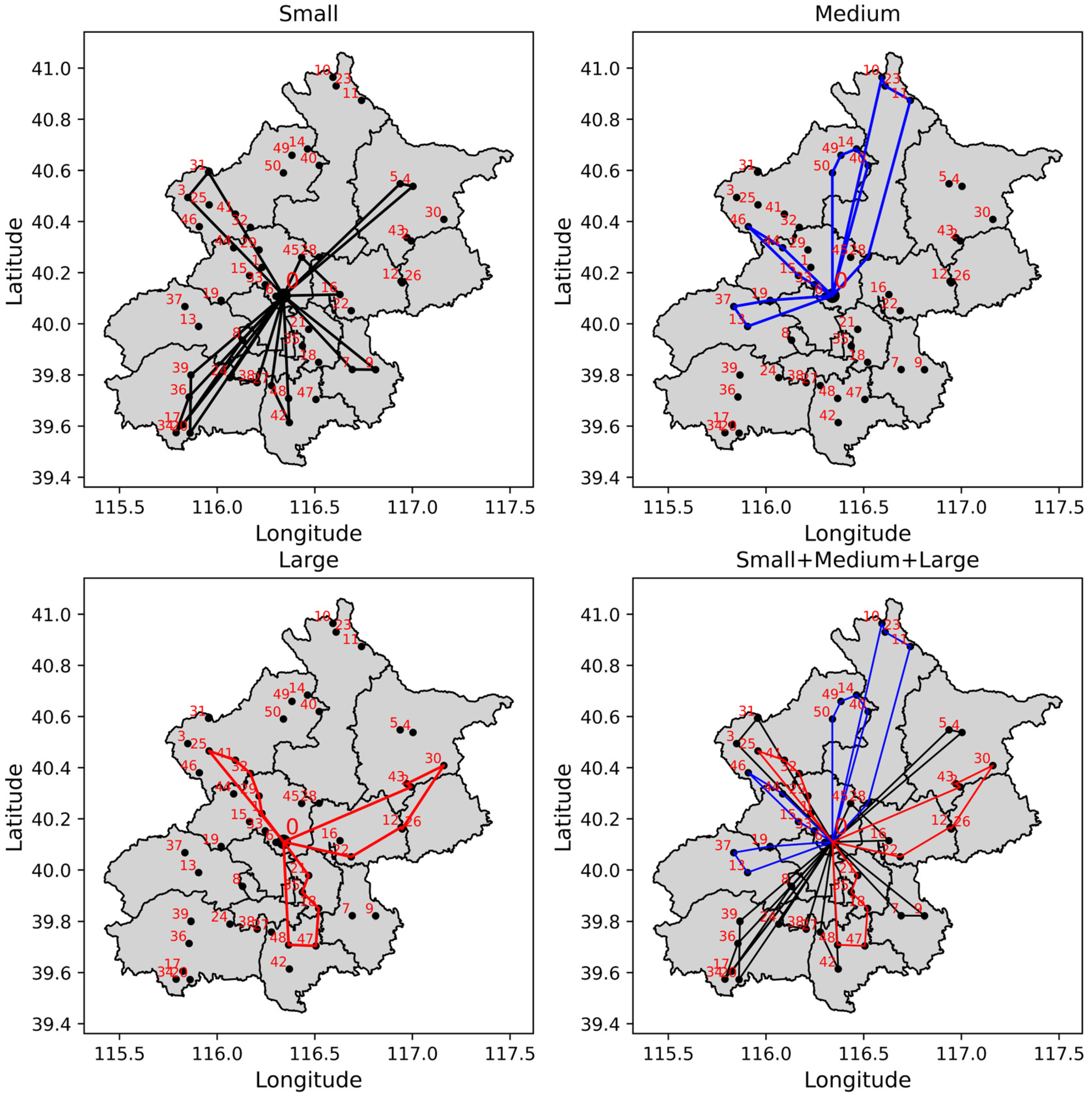
Drawing four delivery route maps for Small, Medium, Large, and Small + Medium + Large vehicles, as shown in
Figure 14, we can see that this distribution plan uses Small, Medium, and Large vehicles, with nine Small vehicles, four Medium vehicles, and three Large vehicles used.
As shown in
Figure 14, considering the delivery strategy of Small + Medium + Large vehicles, to understand the impact of vehicle models on the optimization results, this article also adopted several delivery strategies such as All-Small, All-Medium, All-Large, Small+Medium, Small+Large, and Medium+Large, and solved the optimization results of these strategies. A comparison of Vnum, f1, f2, f3, f4, F1, F2, and F3 is shown in
Table 11.
From
Table 11, it can be seen that in terms of the number of vehicles used, the All-Large strategy uses the fewest vehicles. In terms of f4 (time penalty cost), only the All-Small, All-Medium, Small+Medium, and Small+Medium+Large strategies did not incur time penalty costs. In the comparison of Vnum, F1, F2, and F3, using the Small+Medium+Large strategy as the control group, the experimental results differences with other strategies are compared, as shown in
Table 12.
From
Table 12, it can be seen that compared to the control group, except for the All-Small and Small+Medium strategies, the Vnum values of the other strategies are all better than that of the control group. In terms of F1 and F2, the results of the control group are superior to those of the other strategies. Regarding F3, only the result of the All-Small strategy is better than that of the control group. This is because, although the All-Small strategy uses more vehicles, the delivery speed is higher than that of the control group; therefore, the result of the optimization objective F3 is better than that of the control group.
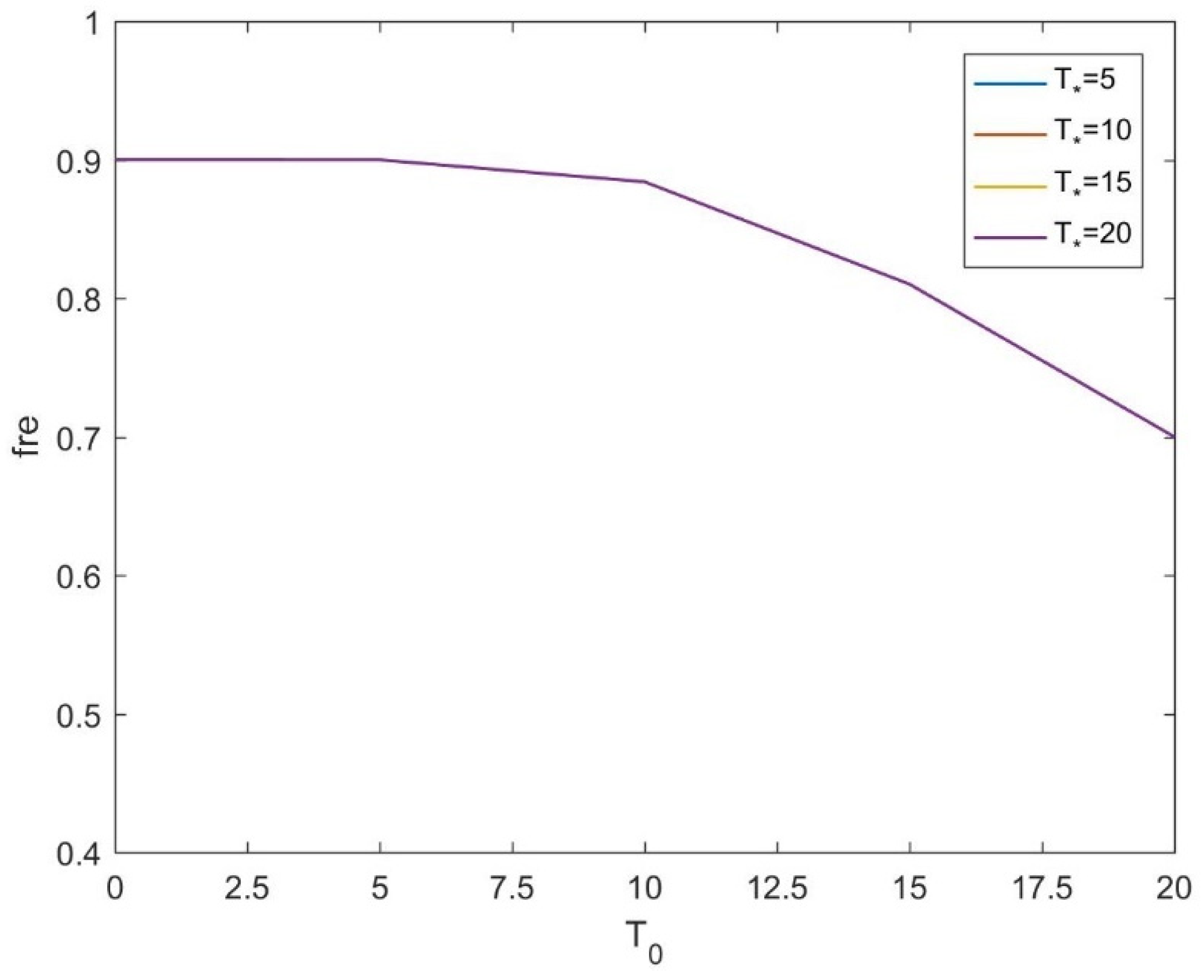
Finally, based on Equations (25) and (26), disregarding the intrinsic properties of goods, we investigated the relationship between the optimization target F3 (average freshness) and the duration of goods leaving the distribution center, environmental temperature, and refrigeration temperature during vehicle transport. Firstly, using the control group from the previous text as a benchmark, we fixed the duration of goods leaving the distribution center and conducted comparative experiments considering different environmental temperatures (
) and different refrigeration temperatures inside the carriage (
). The experimental results are shown in
Figure 15.
From
Figure 15, it can be observed that under different external environmental temperature conditions, the relationship curves between the optimization target F3 and the refrigeration temperature inside the carriage fully overlap, indicating identical experimental results. This suggests that the external environmental temperature during transportation does not affect the freshness of goods, with the refrigeration temperature inside the carriage being the most influential factor. Additionally, the figure shows that as the refrigeration temperature inside the carriage increases, the average freshness of the goods decreases when they reach the customer. This indicates that to optimize F3 and increase freshness, businesses need to maintain a higher refrigeration temperature during transport. Secondly, we studied the relationship between refrigeration temperature and cost and carbon emissions under different external environmental temperatures, with the experimental results shown in
Figure 16.
From
Figure 16, it is evident that under the same refrigeration temperature, as the environmental temperature increases, the distribution cost and carbon emissions also increase. Under the same external environmental temperature, when the refrigeration temperature is higher than the environmental temperature, increasing the carriage refrigeration temperature leads to an increased distribution cost and carbon emissions. Conversely, when the refrigeration temperature is lower than the environmental temperature, increasing the carriage refrigeration temperature reduces the distribution cost and carbon emissions until the refrigeration temperature equals the environmental temperature, where the cost and carbon emissions are at their minimum. This is because when the environmental temperature matches the vehicle refrigeration temperature, the refrigeration engine inside the carriage defaults to stop working, ceasing the fuel consumption associated with it. This indicates that cold chain logistics transportation during high external environmental temperatures results in higher costs and carbon emissions; additionally, the lower the carriage refrigeration temperature, the higher the transportation cost and carbon emissions.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}