
A Symmetry-Inspired Hierarchical Control Strategy for Preventing Rollover in Articulated Rollers


Abstract
1. Introduction
- Modeling: We develop a six-degree-of-freedom dynamic model to capture the vehicle’s roll behavior on uneven terrains. This model also incorporates roll coupling characteristics to accurately describe the articulated compactor’s dynamic interaction between front and rear bodies.
- Rollover stability Index: This study introduces the rollover energy barrier (REB) as the key risk assessment index, quantifying the critical rollover energy from the current state, overcoming the limitation of traditional indices, such as non-additivity across front and rear bodies and lack of precision.
- Control Strategy: A hierarchical stability controller (HSC) based on NMPC and ADRC is proposed. By employing limited model prediction, the computational burden of NMPC is reduced, while ADRC is utilized for vehicle motion control, enhancing system response speed and disturbance rejection capability.
2. Experimental Platforms
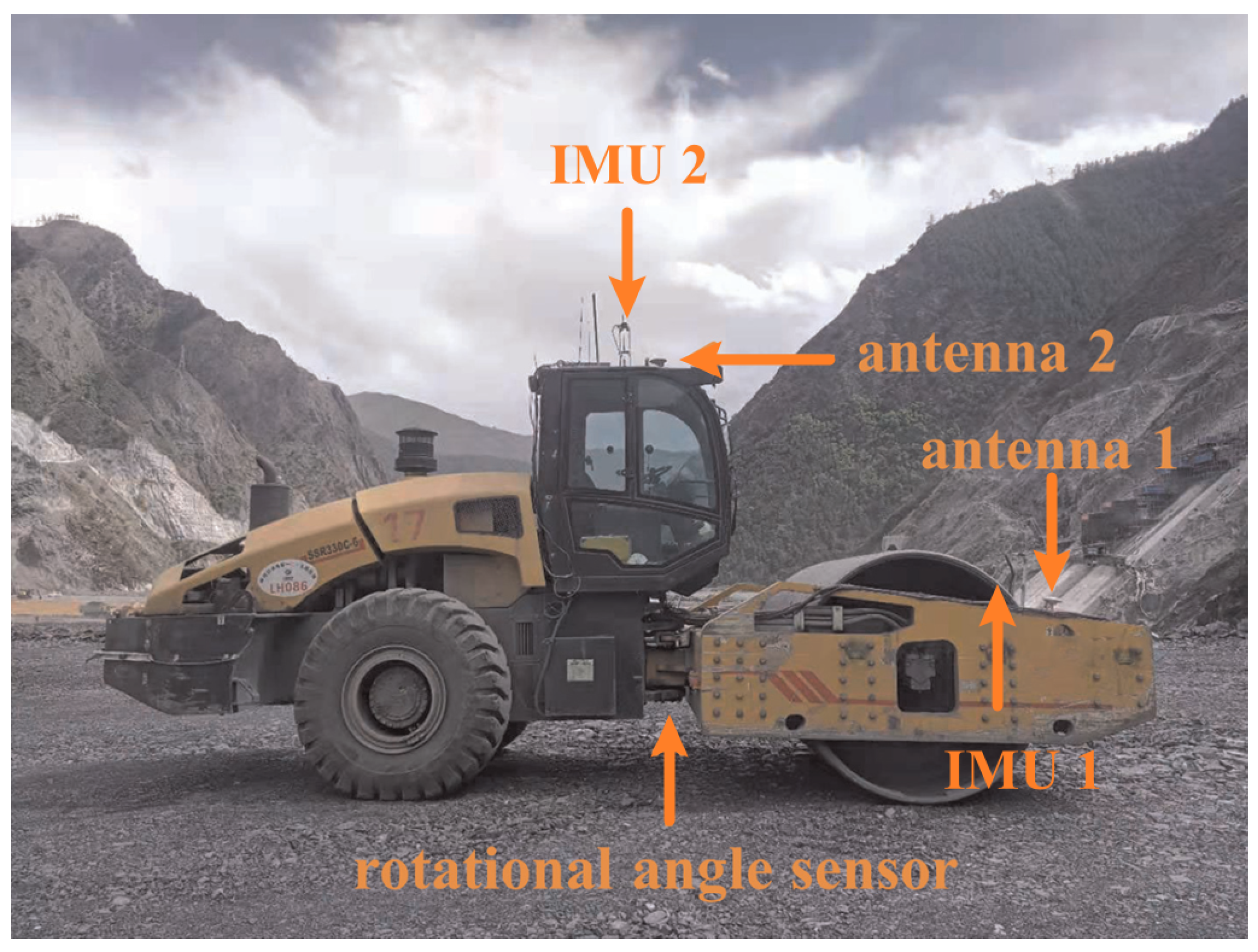
2.1. Real UR Platform
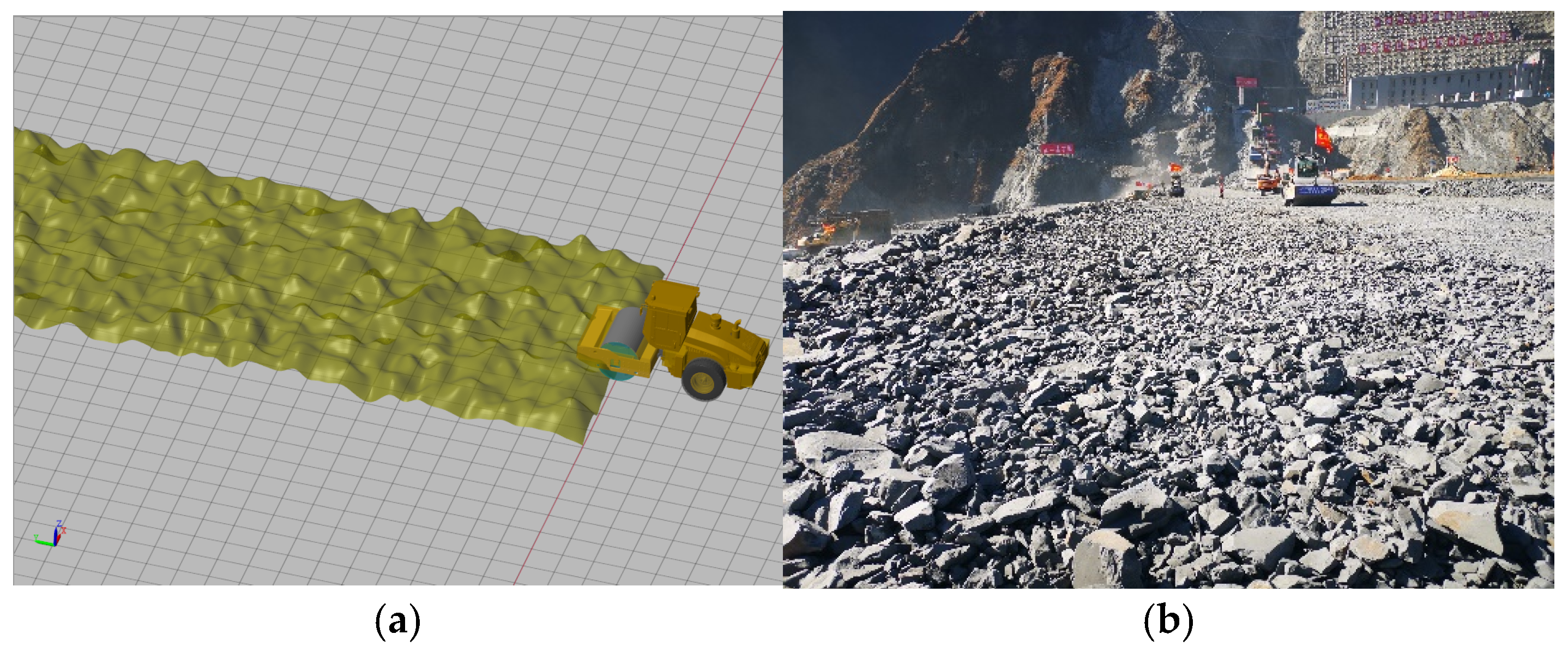
2.2. Simulation Platform
3. Control-Oriented Modeling
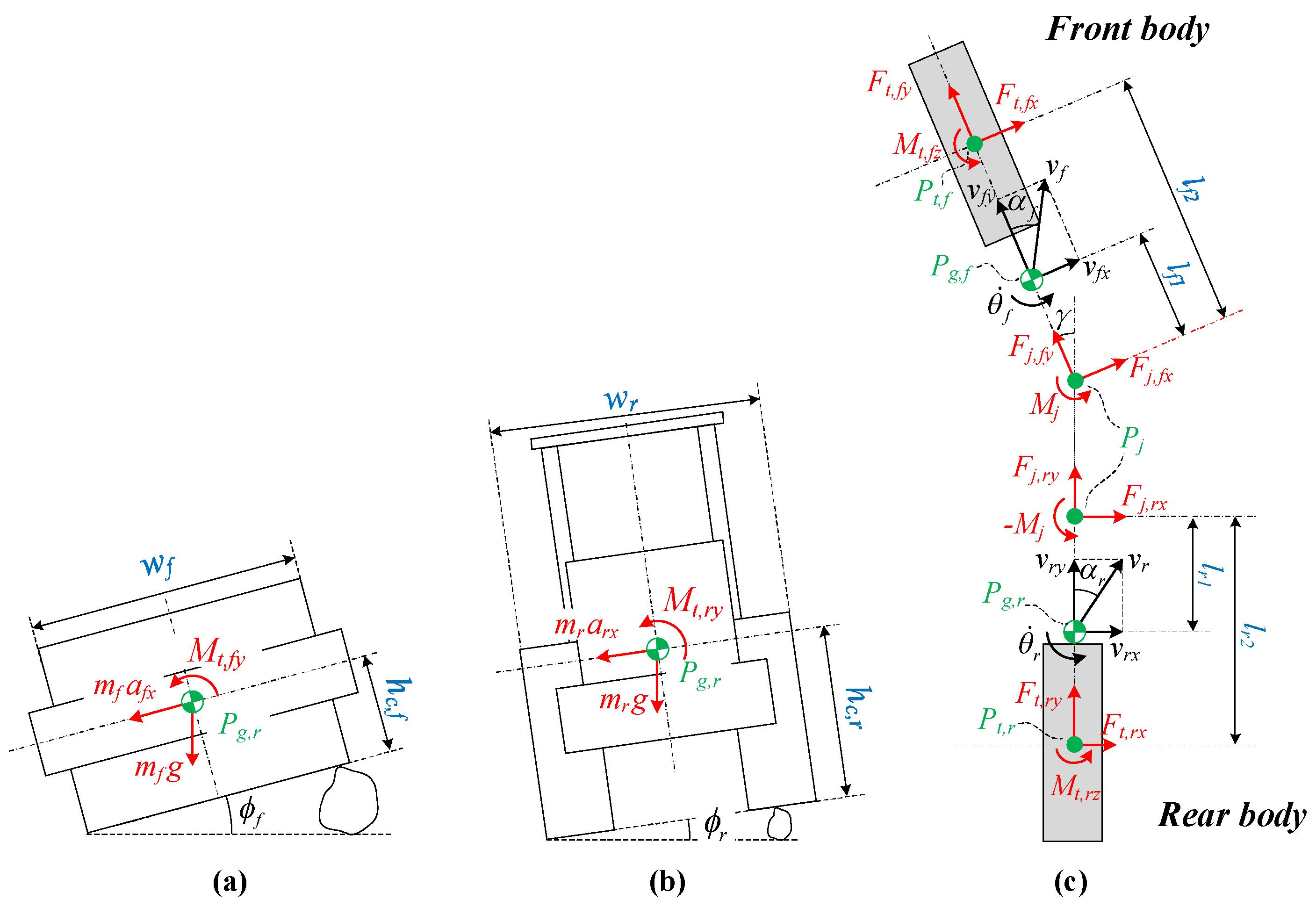
3.1. 6-DOF Dynamic Model
- Rigid suspension hypothesis: The suspension system is assumed to have a negligible effect on vehicle dynamics. This simplification is justified by the UR’s primary application in compaction work, where a stiffer suspension is necessary to transmit larger instantaneous impact forces to the ground.
- Idealized tire-ground roll moment model: The tire-ground interaction is represented by a rotational spring-damper system to simulate the tire’s mechanical response in roll rotational directions, ignoring plastic deformation.
- Neglecting pitch dynamics: Pitch dynamics are excluded from the analysis under the assumption that their effect on overall stability is minimal. This simplification allows the model to focus on roll dynamics and reduces computational complexity.
- Single-track model assumption: The left and right wheels of each axle are simplified as a single, centralized wheel, ignoring the lateral load transfer and side force differences between them. This assumption applies exclusively to in-plane dynamics analysis.
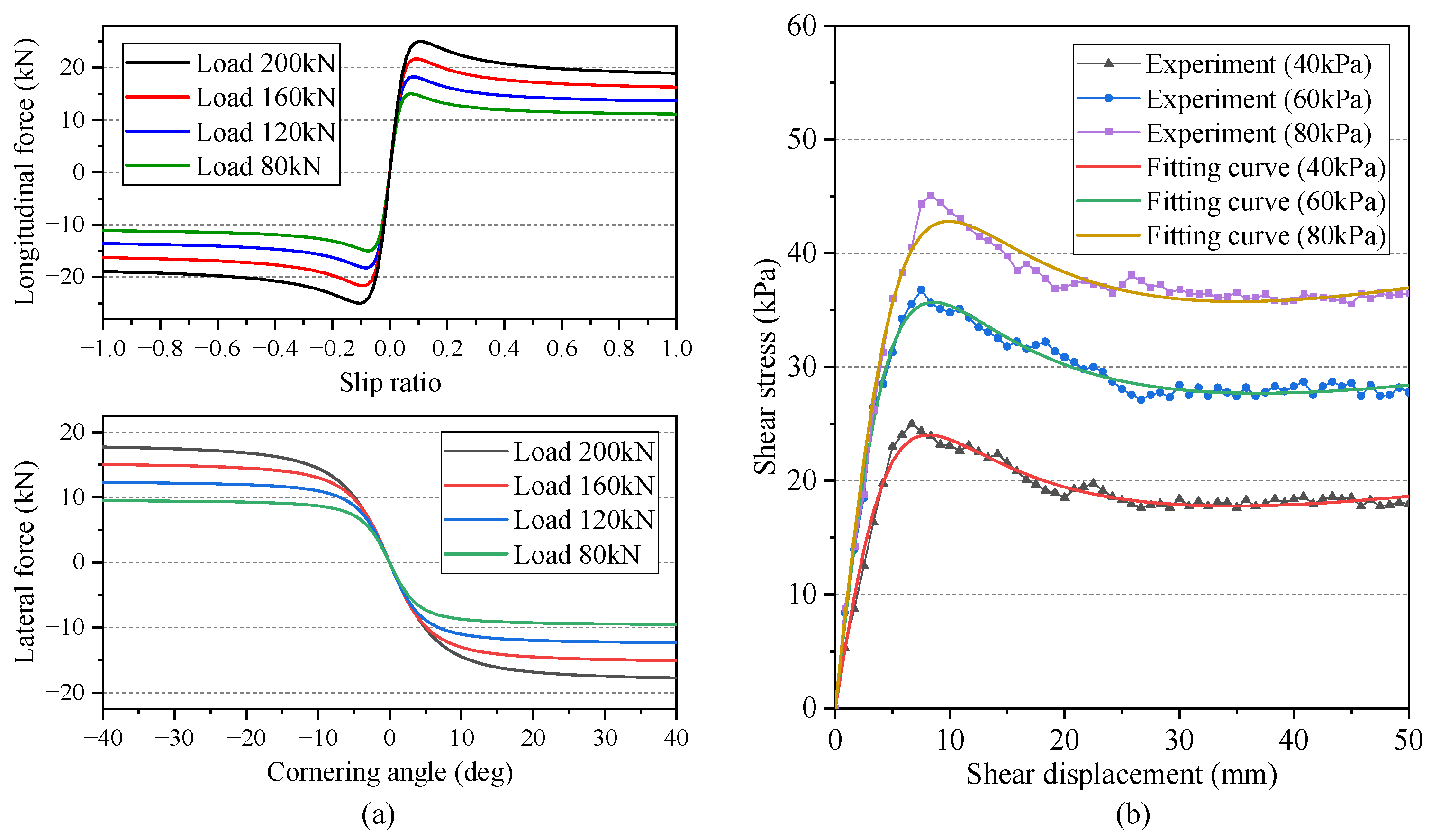
3.2. Rear Tires and Front Drum Model
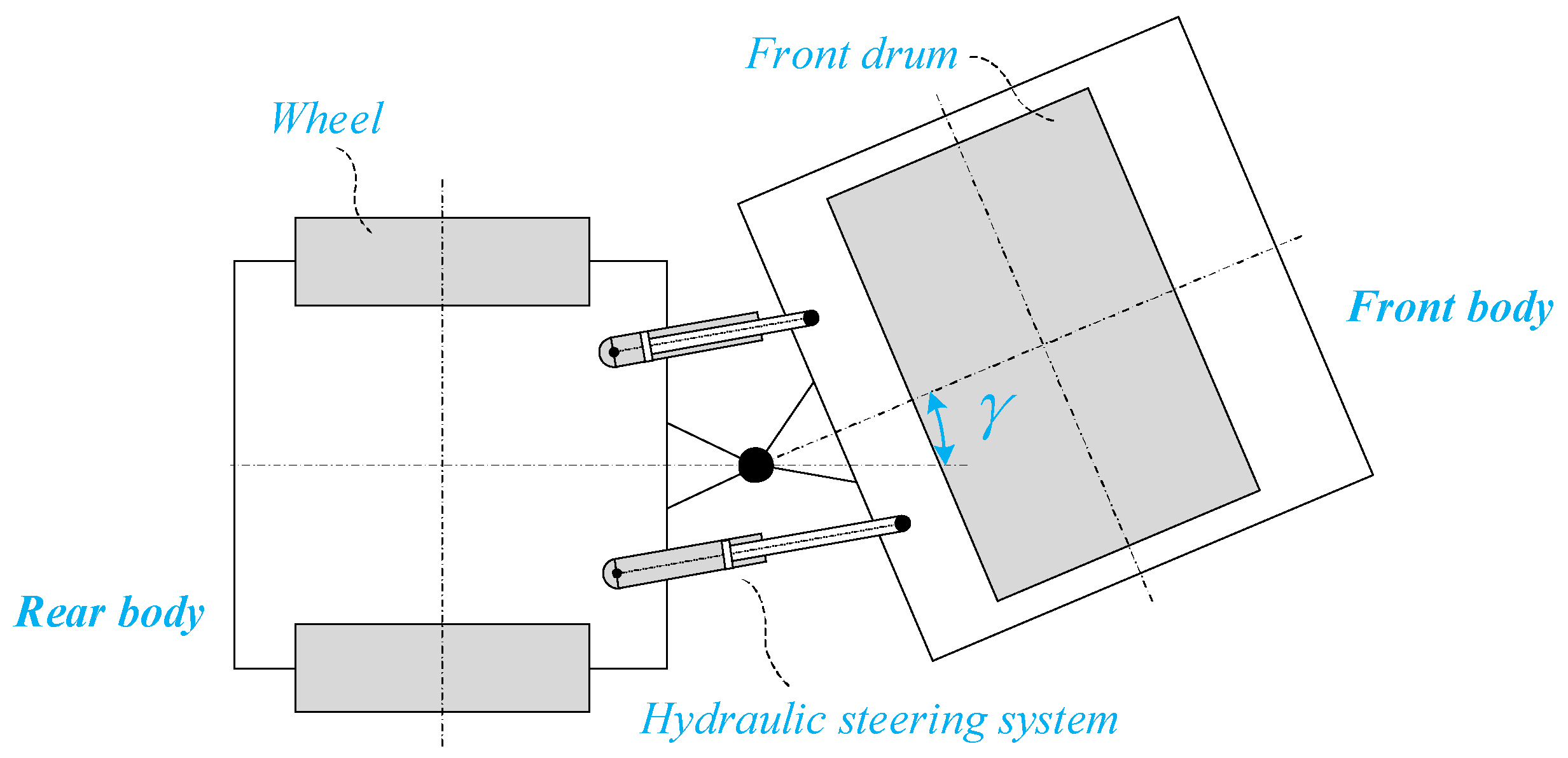
3.3. Hydraulic Steering Model
4. Rollover Energy Barrier
4.1. The Critical Rollover Energy
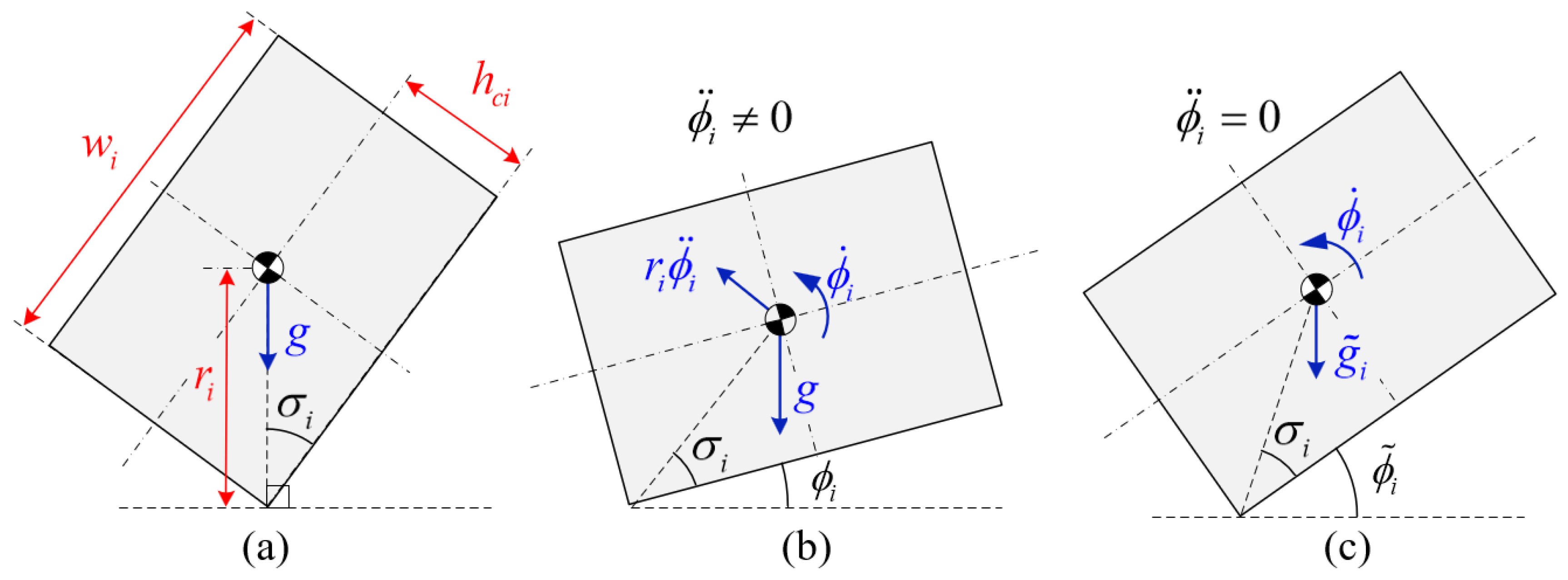
4.2. Generalized Potential Energy
4.3. Roll Kinetic Energy
5. Hierarchical Controller Design
5.1. High-Level NMPC
5.2. Low-Level CDRC
6. Experimental Verification
6.1. Validation of REB
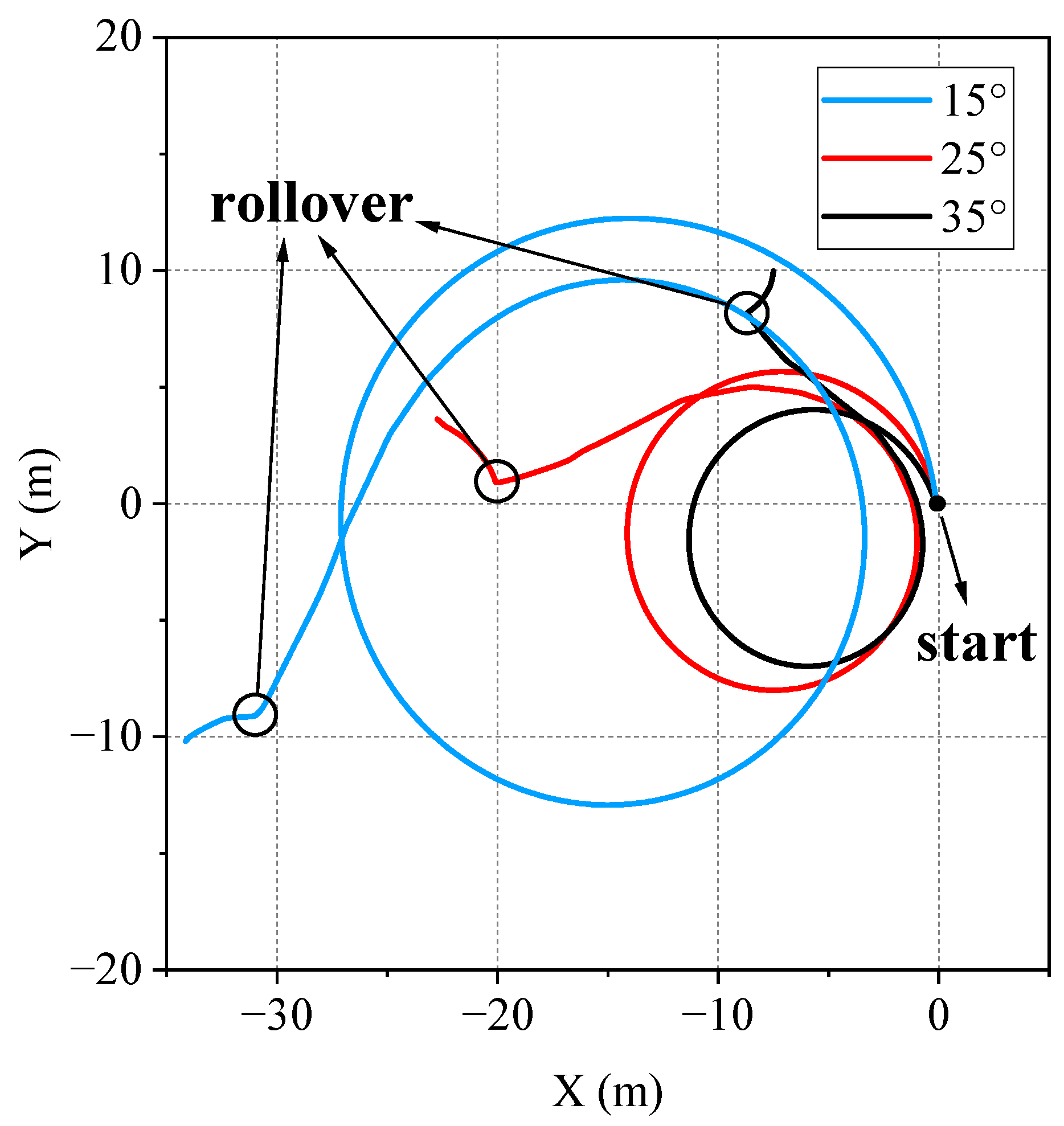
- Untripped Rollover: This scenario simulates the lateral moment imbalance caused by improper operations. In the experiment, a non-zero articulated angle remains constant, while the UR’s longitudinal speed increases linearly, ultimately leading to rollover.
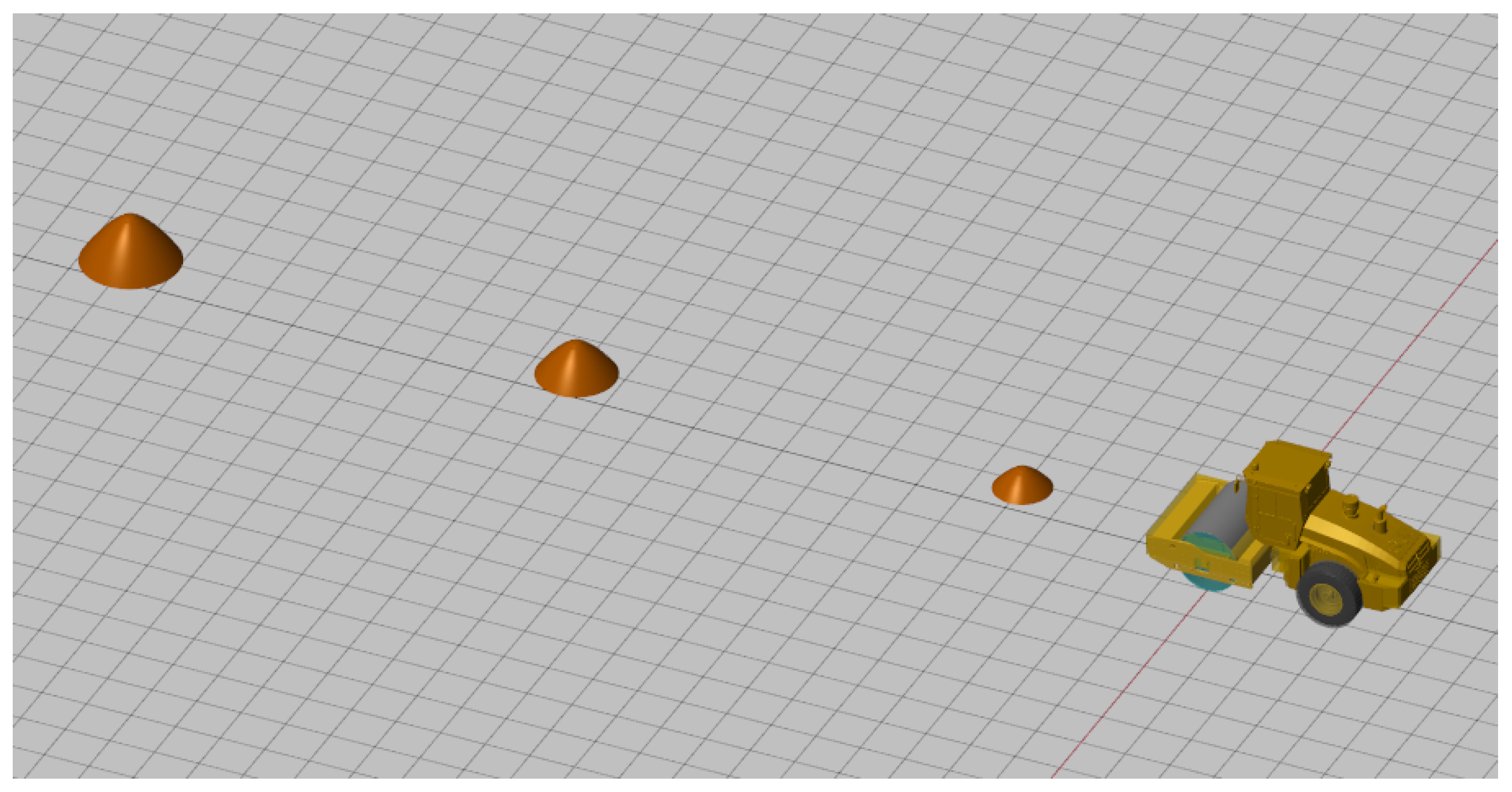
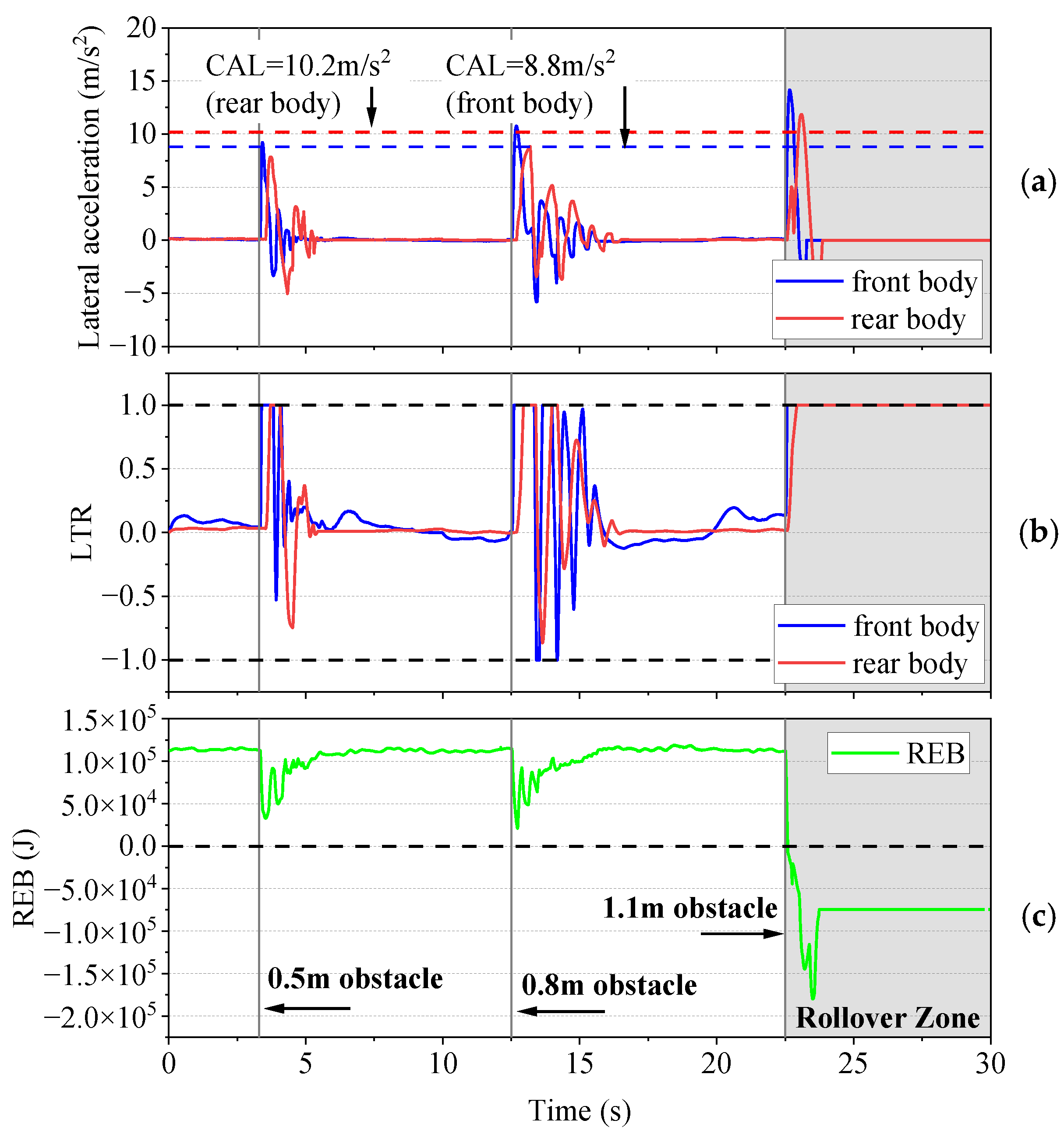
- Tripped rollover: This scenario simulates sudden vertical disturbances to the front drum and rear tires caused by ground irregularities, represented as three predefined obstacle heights within the simulation environment.
6.1.1. Untripped Rollover Scenario
6.1.2. Tripped Rollover Scenario
6.2. Validation of HSC
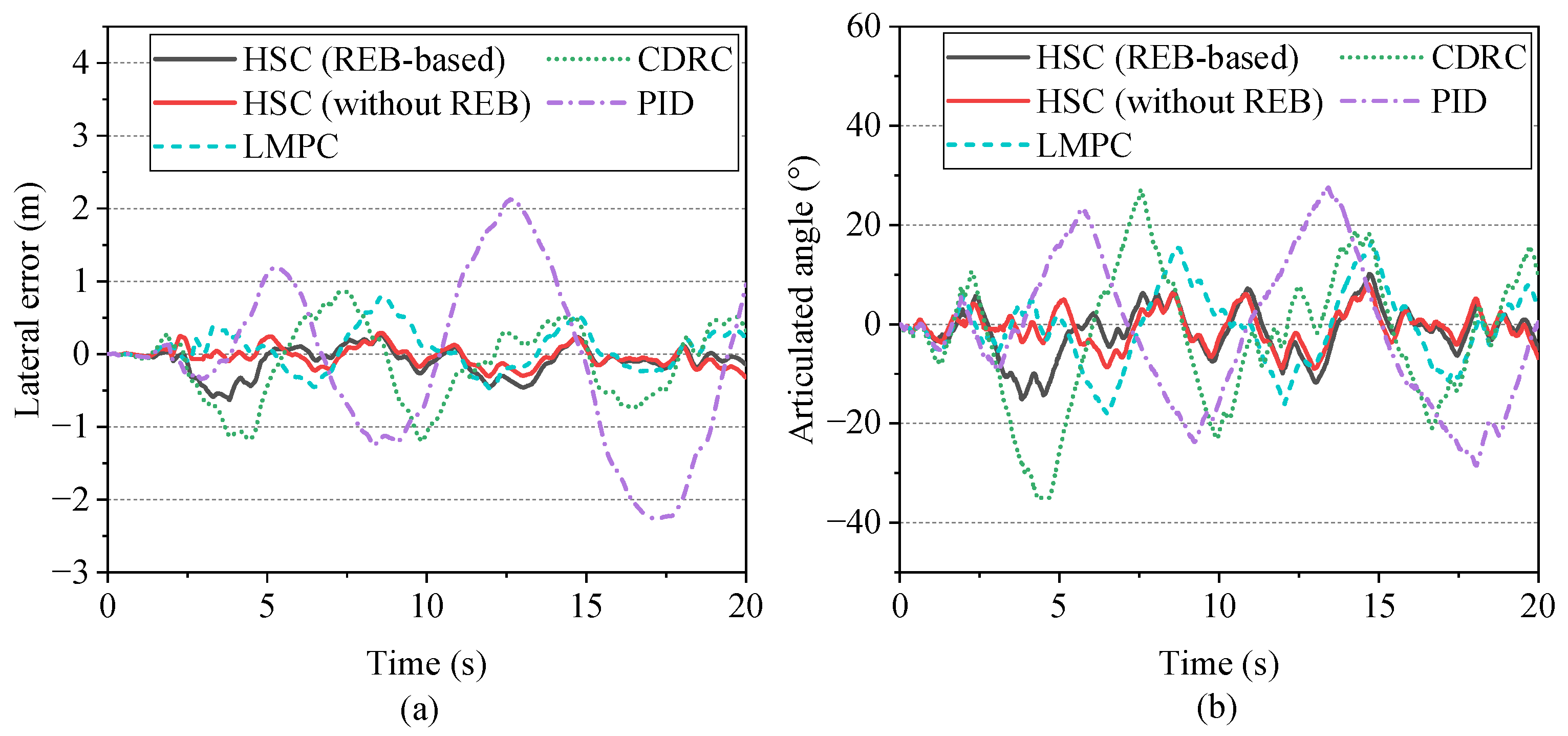
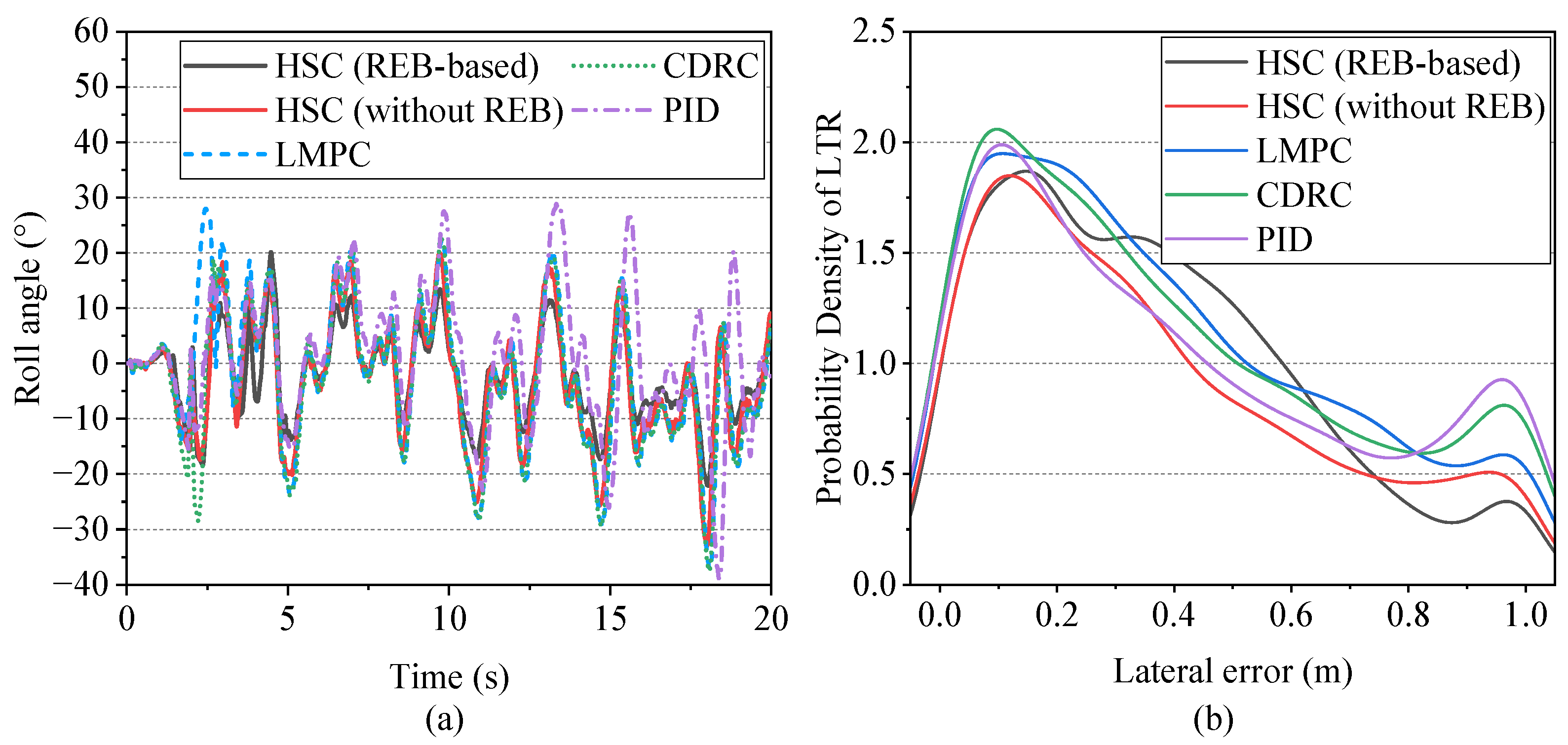
6.2.1. Simulation Experiment
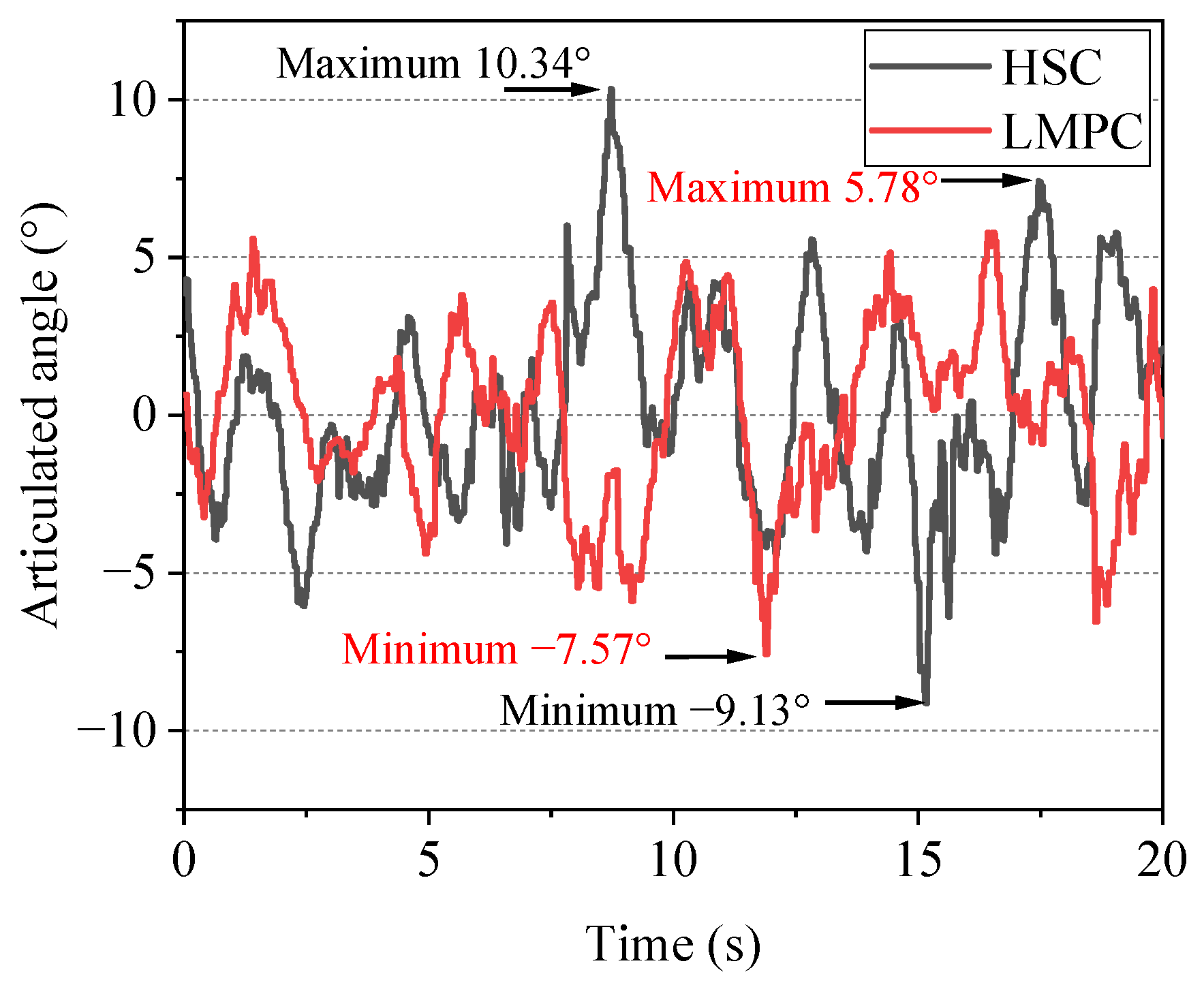
6.2.2. Real UR Experiment
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description |
|---|---|
| The x-axis acceleration (front body) | |
| The x-axis acceleration (rear body) | |
| The y-axis acceleration (front body) | |
| The y-axis acceleration (rear body) | |
| The x-axis velocity (front body) | |
| The x-axis velocity (rear body) | |
| The y-axis velocity (front body) | |
| The y-axis velocity (rear body) | |
| The orientation angle (front body) | |
| The orientation angle (rear body) | |
| The yaw angle (front body) | |
| The yaw angle (rear body) | |
| The articulated angle of the front and rear bodies | |
| The roll angle (front body) | |
| The roll angle (rear body) | |
| The lateral force applied by the tire (front body) | |
| The longitudinal force applied by the tire (front body) | |
| The lateral force applied by the tire (front body) | |
| The longitudinal force applied by the tire (front body) | |
| The aligning torque applied by the tire (front body) | |
| The aligning torque applied by the tire (rear body) | |
| The steering torque applied by the hydraulic system |
Appendix A.2
| Parameter | Description | Value | Unit |
|---|---|---|---|
| The front body mass | 22,500 | kg | |
| The rear body mass | 11,000 | kg | |
| The distance from the joint point to the front CG | 1.45 | m | |
| The distance from the joint point to the front axle | 1.58 | m | |
| The distance from the joint point to the rear CG | 1.52 | m | |
| The distance from the joint point to the rear axle | 1.69 | m | |
| The width of the front body | 2.02 | m | |
| The width of the rear body | 1.85 | m | |
| The height of the front body CG | 0.85 | m | |
| The height of the rear body CG | 1.02 | m | |
| The rotational inertia around the z-axis (front body) | 15,630 | kg·m2 | |
| The rotational inertia around the z-axis (rear body) | 11,792 | kg·m2 | |
| The rotational inertia around the y-axis (front body) | 8515 | kg·m2 | |
| The rotational inertia around the y-axis (rear body) | 7332 | kg·m2 | |
| The acceleration of gravity | 9.81 | m/s2 |
Appendix B
References
- Yang, M.; Bian, Y.; Liu, G.; Zhang, H. Path Tracking Control of an Articulated Road Roller with Sideslip Compensation. IEEE Access 2020, 8, 127981–127992. [Google Scholar] [CrossRef]
- Yu, S.; Hirche, M.; Huang, Y.; Chen, H.; Allgöwer, F. Model predictive control for autonomous ground vehicles: A review. Auton. Intell. Syst. 2021, 1, 4. [Google Scholar] [CrossRef]
- Zhang, C.; Wu, J.; Li, C. Recent Progress in Robot Control Systems: Theory and Applications. Symmetry 2024, 16, 43. [Google Scholar] [CrossRef]
- Carabin, G.; Gasparetto, A.; Mazzetto, F.; Vidoni, R. Design, implementation and validation of a stability model for articulated autonomous robotic systems. Robot. Auton. Syst. 2016, 83, 158–168. [Google Scholar] [CrossRef]
- Reński, A. Investigation of the Influence of the Centre of Gravity Position on the Course of Vehicle Rollover. In Proceedings of the 24th International Technical Conference on the Enhanced Safety of Vehicles (ESV) National Highway Traffic Safety Administration, Gothenburg, Sweden, 8–11 June 2015. [Google Scholar]
- Gao, Y.; Shen, Y.; Xu, T.; Zhang, W.; Guvenc, L. Oscillatory Yaw Motion Control for Hydraulic Power Steering Articulated Vehicles Considering the Influence of Varying Bulk Modulus. IEEE Trans. Control Syst. Technol. 2019, 27, 1284–1292. [Google Scholar] [CrossRef]
- Rowduru, S.; Kumar, N.; Kumar, A. A critical review on automation of steering mechanism of load haul dump machine. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2019, 234, 160–182. [Google Scholar] [CrossRef]
- Jin, Z.; Li, B.; Li, J. Dynamic Stability and Control of Tripped and Untripped Vehicle Rollover; Morgan & Claypool Publishers: San Rafael, CA, USA, 2019. [Google Scholar]
- Phanomchoeng, G.; Rajamani, R. New Rollover Index for the Detection of Tripped and Untripped Rollovers. IEEE Trans. Ind. Electron. 2013, 60, 4726–4736. [Google Scholar] [CrossRef]
- Tota, A.; Dimauro, L.; Velardocchia, F.; Paciullo, G.; Velardocchia, M. An intelligent predictive algorithm for the anti-rollover prevention of heavy vehicles for off-road applications. Machines 2022, 10, 835. [Google Scholar] [CrossRef]
- Committee, S.V.D.S. Steady-state directional control test procedures for passenger cars and light trucks. SAE Stand. J. 1996, 266. [Google Scholar]
- Rakheja, S.; Piche, A. Development of directional stability criteria for an early warning safety device. SAE Trans. 1990, 877–889. [Google Scholar]
- Gauchía, A.; Olmeda, E.; Aparicio, F.; Díaz, V. Bus mathematical model of acceleration threshold limit estimation in lateral rollover test. Veh. Syst. Dyn. 2011, 49, 1695–1707. [Google Scholar] [CrossRef]
- Hac, A.; Brown, T.; Martens, J. Detection of Vehicle Rollover; 2004-01-1757; SAE Technical Paper; SAE: Warrendale, PA, USA, 2004. [Google Scholar] [CrossRef]
- Liu, P.; Rakheja, S.; Ahmed, A. Detection of dynamic roll instability of heavy vehicles for open-loop rollover control. SAE Trans. 1997, 632–639. [Google Scholar]
- Xu, X.; Ai, X.; Chen, R.; Jiang, G.; Hua, X. Research on roll stability of articulated engineering vehicles based on dynamic lateral transfer load. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 2364–2376. [Google Scholar] [CrossRef]
- Ye, Z.; Xie, W.; Yin, Y.; Fu, Z. Dynamic rollover prediction of heavy vehicles considering critical frequency. Automot. Innov. 2020, 3, 158–168. [Google Scholar] [CrossRef]
- Zheng, L.; Lu, Y.; Li, H.; Zhang, J. Anti-Rollover Control and HIL Verification for an Independently Driven Heavy Vehicle Based on Improved LTR. Machines 2023, 11, 117. [Google Scholar] [CrossRef]
- Yang, X.; Wu, C.; He, Y.; Lu, X.-Y.; Chen, T. A dynamic rollover prediction index of heavy-duty vehicles with a real-time parameter estimation algorithm using NLMS method. IEEE Trans. Veh. Technol. 2022, 71, 2734–2748. [Google Scholar] [CrossRef]
- Jeong, Y. Integrated Vehicle Controller for Path Tracking with Rollover Prevention of Autonomous Articulated Electric Vehicle Based on Model Predictive Control. Actuators 2023, 12, 41. [Google Scholar] [CrossRef]
- Xia, G.; Li, J.; Tang, X.; Zhang, Y.; Zhao, L. Anti-Rollover of the Counterbalanced Forklift Truck Based on Zero-Moment Point; 0148-7191; SAE Technical Paper; SAE: Warrendale, PA, USA, 2021. [Google Scholar]
- Hong, H.; Wang, K.; d’Apolito, L.; Quan, K.; Yao, X. Anti-Rollover Control for All-Terrain Vehicle Based on Zero-Moment Point; 0148-7191; SAE Technical Paper; SAE: Warrendale, PA, USA, 2024. [Google Scholar]
- Wang, H.; Hou, L.; Shangguan, W.-B. Research on vehicle rollover warning and braking control system based on secondary predictive zero-moment point position. SAE Int. J. Adv. Curr. Pract. Mobil. 2022, 4, 1689–1703. [Google Scholar] [CrossRef]
- Chao, P.-P.; Zhang, R.-Y.; Wang, Y.-D.; Tang, H.; Dai, H.-L. Warning model of new energy vehicle under improving time-to-rollover with neural network. Meas. Control 2022, 55, 1004–1015. [Google Scholar] [CrossRef]
- Chen, X.; Chen, W.; Hou, L.; Hu, H.; Bu, X.; Zhu, Q. A novel data-driven rollover risk assessment for articulated steering vehicles using RNN. J. Mech. Sci. Technol. 2020, 34, 2161–2170. [Google Scholar] [CrossRef]
- Zhu, T.; Yin, X.; Na, X.; Li, B. Research on a Novel Vehicle Rollover Risk Warning Algorithm Based on Support Vector Machine Model. IEEE Access 2020, 8, 108324–108334. [Google Scholar] [CrossRef]
- Zhu, T.; Yin, X.; Li, B.; Ma, W. A Reliability Approach to Development of Rollover Prediction for Heavy Vehicles Based on SVM Empirical Model with Multiple Observed Variables. IEEE Access 2020, 8, 89367–89380. [Google Scholar] [CrossRef]
- Mao, Y.; Wu, Y.; Yan, X.; Liu, M.; Xu, L. Simulation and experimental research of electric tractor drive system based on Modelica. PLoS ONE 2022, 17, e0276231. [Google Scholar] [CrossRef] [PubMed]
- Ensbury, T.; Horn, N.; Dempsey, M. Dymola and Simulink in Co-Simulation: A Vehicle Electronic Stability Control Case Study. 2020. Available online: https://www.claytex.com/wp-content/uploads/2021/06/Dymola-and-Simulink-in-Co-Simulation_-a-case-study.pdf (accessed on 2 January 2025).
- Bhoraskar, A.; Sakthivel, P. A review and a comparison of Dugoff and modified Dugoff formula with Magic formula. In Proceedings of the 2017 International Conference on Nascent Technologies in Engineering (ICNTE), Vashi, Navi Mumbai, India, 27–28 January 2017; pp. 1–4. [Google Scholar]
- Pacejka, H.B.; Bakker, E. The magic formula tyre model. Veh. Syst. Dyn. 1992, 21, 1–18. [Google Scholar] [CrossRef]
- Vafaei, N.; Fakharian, K.; Sadrekarimi, A. Sand-sand and sand-steel interface grain-scale behavior under shearing. Transp. Geotech. 2021, 30, 100636. [Google Scholar] [CrossRef]
- Ziogos, A.; Brown, M.J.; Ivanovic, A.; Morgan, N. Understanding rock–steel interface properties for use in offshore applications. Proc. Inst. Civ. Eng.-Geotech. Eng. 2023, 176, 27–41. [Google Scholar] [CrossRef]
- Zhou, W.; Guo, Z.; Wang, L.; Li, J.; Rui, S. Sand-steel interface behaviour under large-displacement and cyclic shear. Soil Dyn. Earthq. Eng. 2020, 138, 106352. [Google Scholar] [CrossRef]
- Rui, S.; Wang, L.; Guo, Z.; Cheng, X.; Wu, B. Monotonic behavior of interface shear between carbonate sands and steel. Acta Geotech. 2021, 16, 167–187. [Google Scholar] [CrossRef]
- Aksoy, H.S.; Taher, N.R.; Ozpolat, A.; Gör, M.; Edan, O.M. An Experimental Study on Estimation of the Lateral Earth Pressure Coefficient (K) from Shaft Friction Resistance of Model Piles under Axial Load. Appl. Sci. 2023, 13, 9355. [Google Scholar] [CrossRef]
- Mei, Z.; Xiao, A.; Mei, J.; Hu, J.; Zhang, P. Experimental Study on Interface Frictional Characteristics between Sand and Steel Pipe Jacking. Appl. Sci. 2023, 13, 2016. [Google Scholar] [CrossRef]
- Jin, X.; Li, Z.; Opinat Ikiela, N.V.; He, X.; Wang, Z.; Tao, Y.; Lv, H. An Efficient Trajectory Planning Approach for Autonomous Ground Vehicles Using Improved Artificial Potential Field. Symmetry 2024, 16, 106. [Google Scholar] [CrossRef]
- Quanzhi, X.; Hui, X.; Kang, S. The Impact of Control Structure on the Path-Following Control of Unmanned Compaction Rollers. In Proceedings of the SAE 2019 Intelligent and Connected Vehicles Symposium, Shanghai, China, 22–23 September 2020. [Google Scholar]
- Xie, H.; Xu, Q.; Song, K. Layered disturbance rejection path-following control with geometry-based feedforward for unmanned rollers. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2023, 237, 1435–1453. [Google Scholar] [CrossRef]
- Jin, X.; Lv, H.; He, Z.; Li, Z.; Wang, Z.; Ikiela, N.V.O. Design of Active Disturbance Rejection Controller for Trajectory-Following of Autonomous Ground Electric Vehicles. Symmetry 2023, 15, 1786. [Google Scholar] [CrossRef]
- Quirynen, R.; Di Cairano, S. Sequential quadratic programming algorithm for real-time mixed-integer nonlinear MPC. In Proceedings of the 2021 60th IEEE Conference on Decision and Control (CDC), Austin, TX, USA, 13–17 December 2021; pp. 993–999. [Google Scholar]
- Rajkumar, S. Nonlinear Model Predictive Control: An Implementation Using CasADi; The Ohio State University: Columbus, OH, USA, 2024. [Google Scholar]
- Sun, N.; Zhang, W.; Yang, J. Integrated Path Tracking Controller of Underground Articulated Vehicle Based on Nonlinear Model Predictive Control. Appl. Sci. 2023, 13, 5340. [Google Scholar] [CrossRef]
- Jin, Z.; Weng, J.; Hu, H. Rollover stability of a vehicle during critical driving manoeuvres. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2007, 221, 1041–1049. [Google Scholar] [CrossRef]
- Bian, Y.; Yang, M.; Fang, X.; Wang, X. Kinematics and path following control of an articulated drum roller. Chin. J. Mech. Eng. 2017, 30, 888–899. [Google Scholar] [CrossRef]
- Zhang, Z.; Fang, M.; Fei, M.; Li, J. Robust and Exponential Stabilization of a Cart–Pendulum System via Geometric PID Control. Symmetry 2024, 16, 94. [Google Scholar] [CrossRef]
- Zhang, K.; Wang, J.; Xin, X.; Li, X.; Sun, C.; Huang, J.; Kong, W. A Survey on Learning-Based Model Predictive Control: Toward Path Tracking Control of Mobile Platforms. Appl. Sci. 2022, 12, 1995. [Google Scholar] [CrossRef]





| Indicators | Prediction Lead Time (s) | |||
|---|---|---|---|---|
| 15° | 25° | 35° | Average | |
| CLA | -- | 0.21 | 0.35 | 0.280 |
| LTR | 0.36 | 0.46 | 0.53 | 0.450 |
| REB | 0.30 | 0.56 | 0.59 | 0.483 |
| Controllers | Average Lateral Error (m) | Lateral Error Range (m) | Articulated Angle Range (°) | The Standard Deviation of Lateral Error (m) |
|---|---|---|---|---|
| HSC (REB-based) | 0.16 | 0.90 | 25.2 | 0.19 |
| HSC (without REB) | 0.11 | 0.61 | 17.1 | 0.13 |
| LMPC | 0.23 | 1.27 | 34.7 | 0.27 |
| CDRC | 0.43 | 2.06 | 62.2 | 0.52 |
| PID | 0.91 | 4.38 | 56.0 | 1.13 |
| Controllers | Roll Angle Range (°) | Instability Proportion (LTR = 1) (%) | Average REB (J) | The Standard Deviation of REB (J) |
|---|---|---|---|---|
| HSC (REB-based) | 42.3 | 2.5 | 93,481 | 12,125 |
| HSC (without REB) | 53.2 | 3.6 | 72,192 | 16,286 |
| LMPC | 65.2 | 4.3 | 66,069 | 17,627 |
| CDRC | 60.1 | 5.9 | 61,615 | 19,094 |
| PID | 67.7 | 6.9 | 52,275 | 24,420 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Q.; Qiang, W.; Xie, H. A Symmetry-Inspired Hierarchical Control Strategy for Preventing Rollover in Articulated Rollers. Symmetry 2025, 17, 118. https://doi.org/10.3390/sym17010118
Xu Q, Qiang W, Xie H. A Symmetry-Inspired Hierarchical Control Strategy for Preventing Rollover in Articulated Rollers. Symmetry. 2025; 17(1):118. https://doi.org/10.3390/sym17010118
Chicago/Turabian StyleXu, Quanzhi, Wei Qiang, and Hui Xie. 2025. "A Symmetry-Inspired Hierarchical Control Strategy for Preventing Rollover in Articulated Rollers" Symmetry 17, no. 1: 118. https://doi.org/10.3390/sym17010118
APA StyleXu, Q., Qiang, W., & Xie, H. (2025). A Symmetry-Inspired Hierarchical Control Strategy for Preventing Rollover in Articulated Rollers. Symmetry, 17(1), 118. https://doi.org/10.3390/sym17010118