1. Introduction
The linear complementarity problem (LCP) is to search for a real column vector
z such that
where
,
is known, and the superscript “
” stands for the transpose of a vector. The applications of the LCP(
) involve the scientific calculation (linear and quadratic programming problems), the engineering (journal bearing free boundary problems), and the economic field (market equilibrium problems), etc.; see [
1,
2,
3,
4,
5,
6,
7].
To compute the numerical solution of a large and sparse LCP(
), various kinds of iterative solving methods have been proposed recently. One of these methods is the modulus-based matrix splitting (MMS) class iteration method, and the relevant research results are abundant. This method includes the modulus-based matrix splitting (MMS) iteration method [
8], the general modulus-based matrix splitting (GMMS) iteration method [
9], the accelerated modulus-based matrix splitting (AMMS) iteration method [
10], and so on. The characteristics of this kind of method are mainly reflected in two aspects; one is to reformulate the LCP as a fixed-point equation by introducing a parameter matrix and a new vector
x, and the other is to develop an iterative method by combining it with matrix splitting [
8,
9,
10,
11,
12,
13]. At present, this kind of MMS iteration method has been used to solve other complementary problems, such as implicit complementarity problems [
14,
15], horizontal complementarity problems [
16,
17,
18], vertical linear complementarity problems [
19,
20,
21], and nonlinear complementarity problems [
22,
23,
24,
25]. There are other efficient iteration methods for solving the LCP(
), such as the fixed-point method [
5], the projection algorithm [
26], and the modulus-based, nonsmooth Newton method [
27].
In [
2], the authors proposed a new modulus-based matrix splitting (NMMS) iteration method for solving the LCP(
) based on a fixed-point equation. The major feature of this method is that no new vector
x is introduced in the iterative procession. Compared with the existing original MMS iteration method [
8], the NMMS iteration method has a simpler pattern. Numerical experiments show that the NMMS iteration method sometimes has some advantages over the MMS iteration methods. In view of these characteristics and advantages, the NMMS iteration method has been used to deal with implicit complementarity problems [
15] and nonlinear complementarity problems [
28]. In this paper, we further study the numerical method for solving the LCP(
) based on the NMMS iteration method. The contributions of this paper manifest in three aspects. First, the two-step simplified modulus-based matrix splitting (TSMMS) iteration method is proposed; it is a novel method. Additionally, the convergence conditions are presented from the spectral radius
and the 2-norm
of the matrix. Second, some specific convergence conditions related to the special matrix splitting are also provided. Third, numerical experiments are illustrated to verify the TSMMS iteration method and convergence theory. The NMMS iteration method involves one instance of matrix splitting, while the TSMMS iteration method involves two instances of matrix splitting; the latter method constitutes a generalization of the former and is used in a wider application field.
The rest of this article is arranged as follows. Some preliminaries are introduced in
Section 2, and the NMMS iteration method, as well as the convergence analysis, are presented in
Section 3. The corresponding numerical experiments are described in
Section 4. Finally, concluding remarks are provided in
Section 5.
2. Preliminaries
Some definitions and denotations are involved in our discussion, such as the
P-matrix, the
Z-matrix, the
M-matrix, the
-matrix, and the comparison matrix
of
A,
H-splitting and
H-compatible splitting. Most of them can been seen in many works within the literature, such as [
2,
8,
29]. In the following passages, we briefly review some lemmas and the modulus-based matrix splitting iteration method [
2].
Lemma 1 ([
30])
. Let be an H-matrix, let D be the diagonal part of the A, and let . Then, A and are nonsingular, , and , where “” represents the absolute value taken by element. Lemma 2 ([
30])
. Let be an M-matrix, and let be a Z-matrix with . Then, B is an M-matrix. Lemma 3 ([
2])
. Let with . If there exists with such that , then . For any positive diagonal matrix
, the LCP (
1) is equivalent to the LCP
It follows that the LCP (
2) can be reformulated as a fixed-point equation:
Set
; then, Equation (
3) can be rewritten as
Additionally, Wu and Li presented the new modulus-based matrix splitting (NMMS) iteration method for solving the LCP (
1) in [
2]. The iterative pattern of this method is described below.
Method 1. (The new modulus-based matrix splitting (NMMS) iteration method)
Let be a splitting of A, and let matrix be nonsingular, where is a positive diagonal matrix. Given any initial vector , for , compute by solving the linear system
In [
2], the authors explained the difference between the NMMS iteration method and the MMS iteration method [
8], and they compared the two methods through numerical experiments.
3. Main Results
In this section, based on the idea of the NMMS iteration method, that is, Method 1, we consider two splittings of A. First, we propose the two-step simplified modulus-based matrix splitting (TSMMS) iteration method, as well as its particular cases in turn. Then, we analyze the convergence.
The TSMMS iteration method. Let
be two splittings of
A, with
and
being nonsingular, where
are two positive diagonal matrices. Given any initial vector
, for
, compute
by solving the following two linear systems:
Compared with the two-step modulus-based matrix splitting (TMMS) iteration method suggested in [
11], this iteration form is simple. We call it the two-step simplified modulus-based matrix splitting (TSMMS) iteration method.
Accelerated over-relaxation (AOR) splitting is a particular form of matrix splitting, which is defined as
where
and
,
is the diagonal matrix of
A, and
and
are the strictly lower triangular matrix and the strictly upper triangular matrix of
A, respectively. For the TSMMS iteration method (
6), if we consider AOR splitting, that is,
then (
6) supplies the two-step simplified modulus-based accelerated over-relaxation (TSMAOR) iteration method
Specifically, when
for
, when
for
, and when
for
, respectively, the TSMAOR iteration method reduces the two-step simplified modulus-based successive over-relaxation (TSMSOR) iteration method:
TSMAOR also reduces the two-step simplified modulus-based Gauss–Seidel (TSMGS) iteration method:
Finally, TSMAOR also reduces the two-step simplified modulus-based Jacobian (TSMJ) iteration method:
Next, we discuss the general convergence conditions for the TSMMS iteration method, and then we discuss some concrete convergence conditions related to the special matrix splitting in terms of the spectral radius and the two-norm of the matrix.
Theorem 1. Let A be a P-matrix, and let be two instances of splitting A, with and being nonsingular, where are two positive diagonal matrices. If any of the following conditions holds, for any initial vector , the iteration sequence generated using the TSMMS iteration method (6) converges to the unique solution of the LCP(): Proof. Since
A is a
P-matrix, we know that the LCP(
) has a unique solution. Let
be the solution. Then,
Combining the previous equation with (
6), we obtain
Hence,
Then,
So, from the above three inequalities, we know that, if any of the conditions (
12)–(
14) in Theorem 1 hold, the iteration sequence
generated using the TSMMS iteration method converges to
for any initial vector
. □
From the proof of Theorem 1, if we consider the two-norm of the matrix, the following theorem can be obtained easily.
Theorem 2. Let A be a P-matrix, and let be two instances of splitting of A, with and being nonsingular, where are two positive diagonal matrices. If any of the following conditions holds, for any initial vector , the iteration sequence generated using the TSMMS iteration method (6) converges to the unique solution of the LCP(): Based on Lemma 1 and the spectral radius theories of a nonnegative matrix, if
in the splitting
satisfies that condition that
is an
H-matrix for
, since
the second condition (ii) in Theorem 1 can be changed as follows:
For this case, we arrive at the following conclusion.
Corollary 1. Let A be a P-matrix, and let be two instances of the -splitting of A. Ifholds, for any initial vector , the iteration sequence generated using the TSMMS iteration method (6) converges to the unique solution of the LCP(). Proof. Since
is an instance of
H-splitting, we know that
is an
M-matrix. When combining this understanding with the fact that
A has positive diagonal elements, we can easily prove that
has positive diagonal elements. In addition, from
and Lemma 2, we know that
is an
M-matrix and that
is an
M-matrix. It follows that
is an
-matrix. Therefore,
Thus, the second condition (
13) in Theorem 1 can be changed as in (
18). □
Next, we set
in specific cases of the TSMMS iteration method, and we discuss the concrete convergence conditions related to (
17) in Theorem 2.
Theorem 3. Let A be a P-matrix, and let in be a symmetric, positive, definite matrix for . Denote and as the smallest and largest eigenvalues of for , respectively. Denote for , and set with . Then, is any of the following conditions holds, for any initial vector , the iteration sequence generated using the TSMMS iteration method (6) converges to the unique solution of the LCP (1): Proof. Since
, the left part of (
17) in Theorem 2 can be reformulated as
Thus, the following equations are solved:
Accordingly, we can obtain the following relations about
:
According to (i)–(iv), when noting that both of the following conditions hold, we know that Theorem 3 is established:
□
We note that there are empty sets in all four conditions of Theorem 3. Moreover, it can be seen from the proof process that, when we solve a set of inequalities, some of them can take an equal sign and some cannot take an equal sign. So, the values at the endpoints should be discussed according to the case. For example, in the first case of condition (ii), when
the domain of
should be modified as
For Theorem 3, there is a particular case, that is, Corollary 2, as follows.
Corollary 2. Let A be a P-matrix, and let in be a positive scalar matrix for . Let , for . Denote for , and set with . Then, if any of the following conditions holds, for any initial vector , the iteration sequence generated using the TSMMS iteration method (6) converges to the unique solution of the LCP(): Proof. Similar to the proof of Theorem 2, the left part of (
17) in Theorem 2 can be reformulated as
Thus, the following equations can be solved:
Accordingly, we can obtain the following relations about
:
From (i)–(iv), we know that Corollary 2 is established. □
Next, we let A be an -matrix, and we let the matrix splitting be the H-splitting. Some convergence conclusions related to Corollary 1 are arrived at below.
Theorem 4. Let A be an -matrix, and let be an H-compatible splitting, with being nonsingular, i.e., , where is a positive diagonal matrix for . Ifthen, for any initial vector , the iteration sequence generated using the TSMMS iteration method (6) converges to the unique solution of the LCP(). Proof. Since
A is an
-matrix, which is also a
P-matrix, we know that the LCP(
) has a unique solution for any
. Since
is an
H-compatible splitting, it is also an
H-splitting due to
being an
M-matrix for
. Thus, the condition
in Corollary 1 can be considered. In the following passages, we will prove that the above condition holds when
for
Since
, we have
Since
is an
M-matrix, there must exist a positive vector,
v, such that
. It follows that
and that
holds since
Thus, Theorem 4 is established. □
It is well known that, if A is an -matrix, when with , then the AOR splitting of A is an H-compatible splitting. So, according to Theorem 4, for the TSMAOR splitting method, we have Corollary 3 as follows.
Corollary 3. Let A be an -matrix, and let be the AOR splitting for . Ifthen, for any initial vector , the iteration sequence generated using the TSMAOR iteration method (8) converges to the unique solution of the LCP(). In fact, ifin Theorem 4, the domain of can be enlarged, that is, Theorem 5 applies as follows. Theorem 5. Let A be an -matrix with , and let be an H-compatible splitting, with being nonsingular, i.e., , where is a positive diagonal matrix for . Ifthen, for any initial vector , the iteration sequence generated using the TSMMS iteration method (6) converges to the unique solution of the LCP(). Proof. Similar to how we proved Theorem 4, we will prove that
holds when
for
if
.
Since
, we have
So, under the condition of Theorem 5, that is,
and
, we know that
and that
is an
-matrix. Thus, there exists a positive vector
v, such that
It follows that
and
holds. Thus, the conclusion is proven. □
Similar to Corollary 3, according to the above theorem, we can easily obtain Corollary 4 as follows.
Corollary 4. Let A be an -matrix with , and let be the AOR splitting for . Ifthen, for any initial vector , the iteration sequence generated using the TSMAOR iteration method (8) converges to the unique solution of the LCP(). Corollaries 3 and 4 apply to the case of for the TSMAOR iteration method (8). In the following, we discuss the case . Theorem 6. Let A be an -matrix, and let be the AOR splitting with , . If either of the following conditions holds, then, for any initial vector , the iteration sequence generated using the TSMAOR iteration method (8) converges to the unique solution of the LCP():
where Φ
1 = Φ
2 = Φ.
Proof. From the proof of Corollary 1, we know that, if
is an
-matrix for
, the condition
can be used. Since
A is an
-matrix, it is easy to observe that
in the AOR splitting is an
-matrix for
. So, the above condition can be considered.
We consider
and
for
, and we have
From the last relation above, we know that, when
then the matrix
is an
-matrix, and when
i.e.,
, and
, then the matrix
is an
M-matrix. So, when the same proof approach as that of Theorem 4 is used, there are positive vectors,
u and
v, such that
Here, we consider the case of
for the second relationship. Thus, we have
Thus, for the two cases, the condition
always holds, and then Theorem 6 is established. □
For the second condition (
26) in Theorem 6, we note that the domain of
is connected with
, which means that
determines the domain. For example, if
, the domain of
is
. On the contrary, if
, the domain of
is
. In addition, since the TSMSOR iteration method, the TSMGS iteration method, and the TSMJ iteration method are the particular cases of the TSMAOR iteration method, it is easy to know that Corollary 3 and Theorem 6 above are applicable to the three methods. In our above discussion for the TSMAOR iteration method, the cases
and
were studied when
separately, and the case
was not considered. Next, we discuss this case, and we obtain the following conclusion.
Theorem 7. Let A be an -matrix, and let be the AOR splitting of A. Denote and , . If and either of the following conditions holds, then, for any initial vector , the iteration sequence generated using the TSMAOR iteration method (8) converges to the unique solution of the LCP (1): Proof. Similar to the idea of Theorem 6, we will prove that the condition
is satisfied under those conditions.
Since
for
, then, for the TSMAOR iteration method, we can prove that
Now, we discuss the conditions that can guarantee the matrix
to be an
M-matrix.
When
,
which is not connected with
. So, we know that, if
that is,
the matrix
is an
M-matrix.
When
,
So, if
the above involved matrix is an
M-matrix.
Under the conditions proven above, for the matrix that appeared in (
18) of Corollary 1, we have
Thus, since
and
are two
M-matrices, there exist two positive vectors,
and
, such that
and
respectively. It follows that the condition
holds. So, from Lemma 3, we know that
Then, according to the spectral radius theories of a nonnegative matrix, we know that
is established for the TSMAOR iteration method. So, the conclusion is proven. □
4. Numerical Experiments
In this section, we provide some examples related to the convergence conditions. IT represents the number of iteration steps, and CPU (in seconds) represents the elapsed time in our experiments. We denote RES
as the norm of the residual vector, which is defined as
where “
” is taken component-wise, and “
” denotes the second norm of the vector. Since
z is the solution to the LCP if and only if
we set the iteration process to cease when
or when IT reaches 300, where
represents the
kth approximate solution produced using the iteration methods. The matrix
A in the LCP is generated via
where
is a block-tridiagonal matrix, with
being a tridiagonal matrix.
is also a tridiagonal matrix, and
C is a given diagonal matrix of order
n with
.
and
are given two numbers to guarantee that
is a
P-matrix. For convenience, we set
to be the initial vector in all of our experiments.
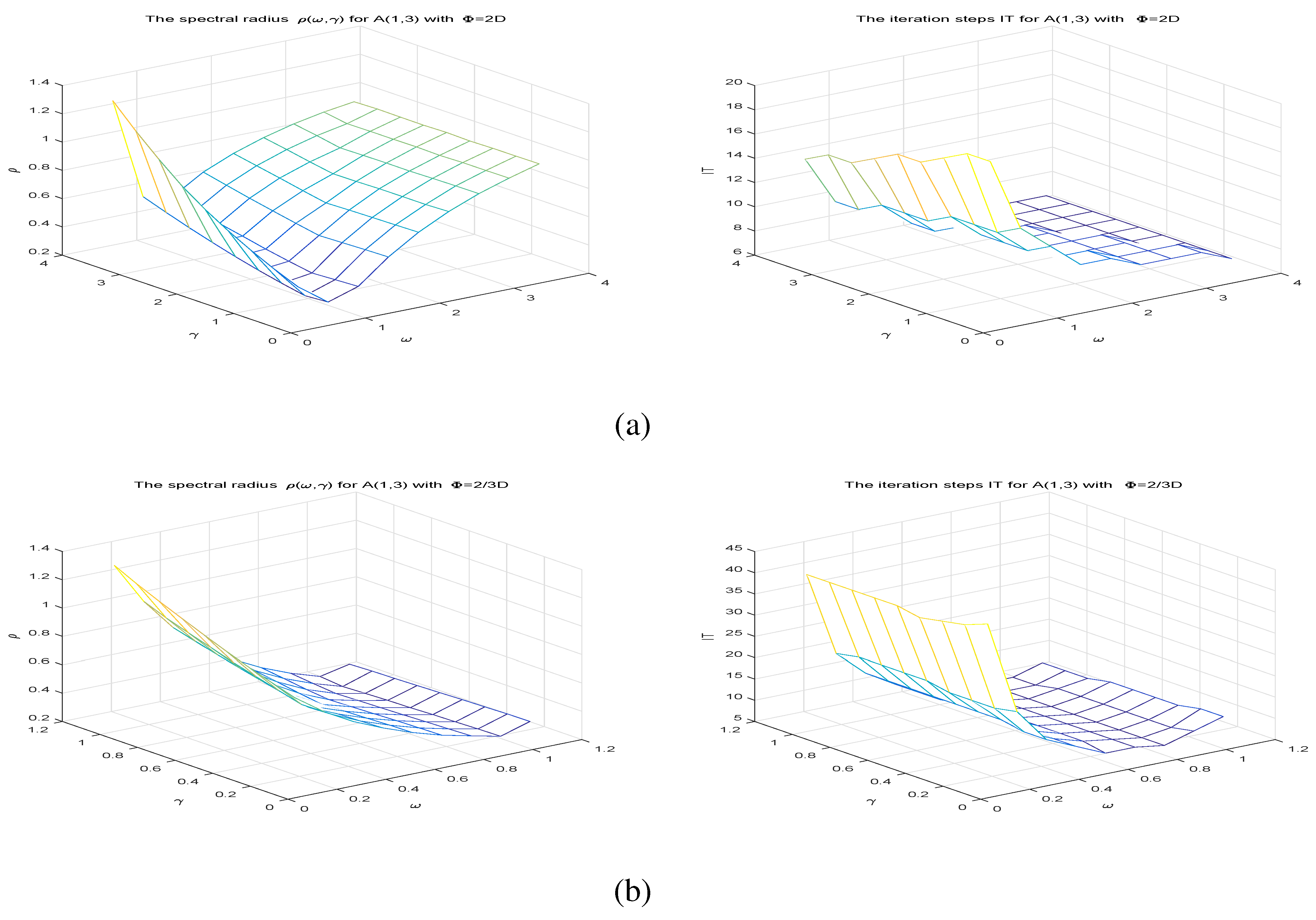
Example 1. In this example, we consider the convergence condition of Theorem 3. We let A in the LCP(1) be , , and with . Then, is a symmetric P-matrix, and is a nonsymmetric P-matrix. We set with in the TSMMS iteration method (6). For , we setandFor , we setandwhere “” is a function in Matlab. Then, we find that both cases satisfy the conditions (19) and (20) in Theorem 3. So, the convergence region of ϕ isTo see the numerical results, we set in the LCP (1), with being the true solution. We select the values of ϕ in the convergence region, and we denote(see Theorem 2) andSetand then the convergence domain of ϕ and the numerical results are shown in Table 1 and Table 2, as well as Figure 1 below, respectively. In
Figure 1, subfigures (a) and (b) are related to the case
; subfigures (c) and (d) are related to the case
. The horizontal axis denotes
, and the vertical axis denotes IT and the function
, respectively.
Example 2. In this example, we consider the convergence of the TSMAOR iteration method. We set A to be with and C to be same as Example 1. Then, A is an -matrix, and Then, from Corollaries 3 and 4 and Theorem 6, we know that, if
, one sufficient region of
is
and if
, the sufficient region of
is
In order to see numerical results, we consider some concrete values of
and
to perform the TSMAOR iteration method. For
, we set
For
, we set
We let
, and we denote the second conditions’ function (
26) in Theorem 6 as
Then, we obtain
Table 3 and
Table 4, as well as
Figure 2, as follows.
In
Figure 2, subfigures (a) and (b) correspond to
Table 3 and
Table 4, respectively, that is, the case
with
and the case
with
. From
Table 3 and
Table 4 and
Figure 2, we can find that, when
, the TSMAOR iteration method is convergent, but when
, there are cases in which the convergent condition
is not satisfied, but the TSMAOR iteration method is also convergent. Moreover, the numerical example also shows that the size of the spectral radius
is not exactly consistent with the number of iterative steps (IT), which is shown in sub-figure (a). Moreover, this example also shows that, when
, the TSMGS iteration method usually performs better.
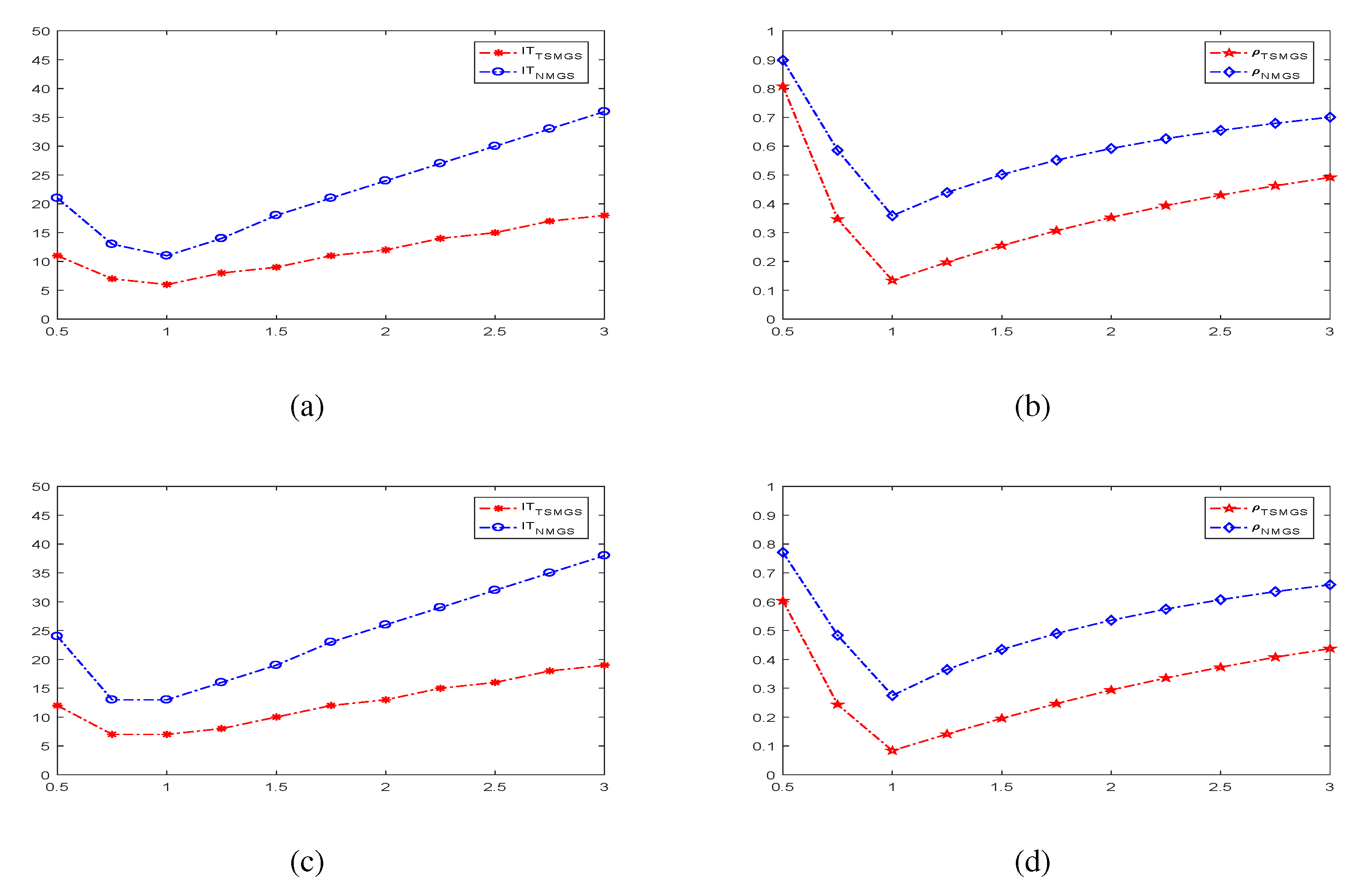
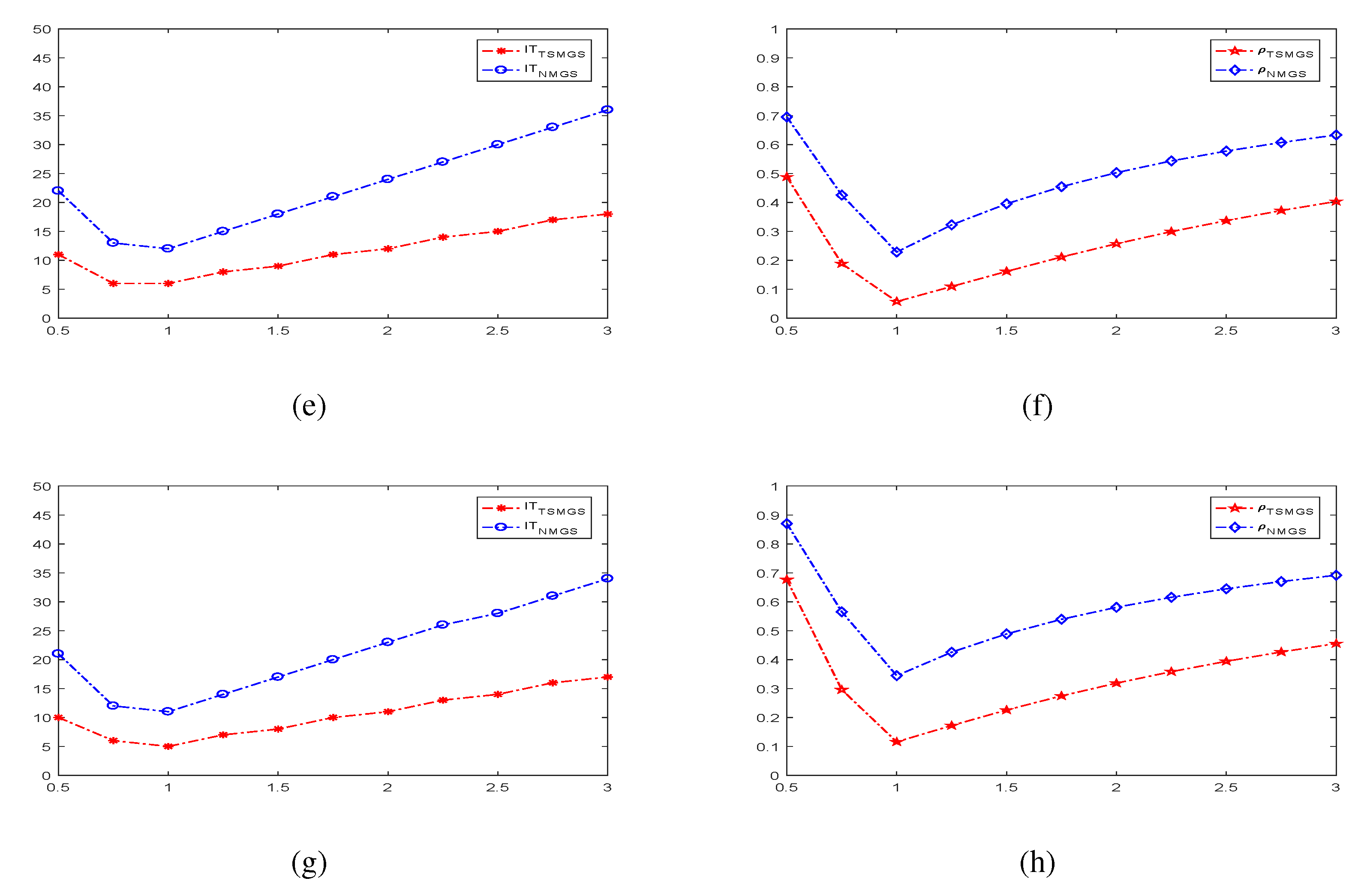
Example 3. In this example, we compare the two-step simplified modulus-based Gauss–Seidel (TSMGS) iteration method with the new modulus-based Gauss–Seidel (NMGS) iteration method in [2]. We consider four cases, , , , and . We set , and then all four cases satisfy the conditionin Corollary 4. Then, the TSMGS iteration method is convergent when We set some concrete value of to perform the two iteration methods, i.e.,We denoteandwhich determine the convergence of the TSMGS iteration method and the NMGS iteration method, respectively. Then, we obtain Figure 3 as follows. In
Figure 3, the horizontal axis denotes
with
, and the vertical axis denotes IT. The sub-figures (a) and (b) are related to
, (c) and (d) are related to
, (e) and (f) are related to
, and (g) and (h) are related to
. This example shows that the TSMGS iteration method is usually better than the NMGS iteration method.




{kind=link}
{kind=link}
{kind=link}
{kind=link}