

Improvement and Application of Hale’s Dynamic Time Warping Algorithm
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. DTW Algorithm
2.1. Principles of Algorithm
2.1.1. The Matching Process of DTW Algorithm
- 1.
- Alignment errors: The distance matrix between different features is calculated based on the features of the two sequences, and the equation is as follows:Here, the alignment error e is an matrix, represents the distance between the i-th feature of the template sequence A and the j-th feature of the sequence B to be matched. The larger the difference between the two features, the larger the distance, and conversely, the smaller the distance. Note that the alignment error here can be changed to other non-negative functions; just make sure that each term of the alignment error e is non-negative.
- 2.
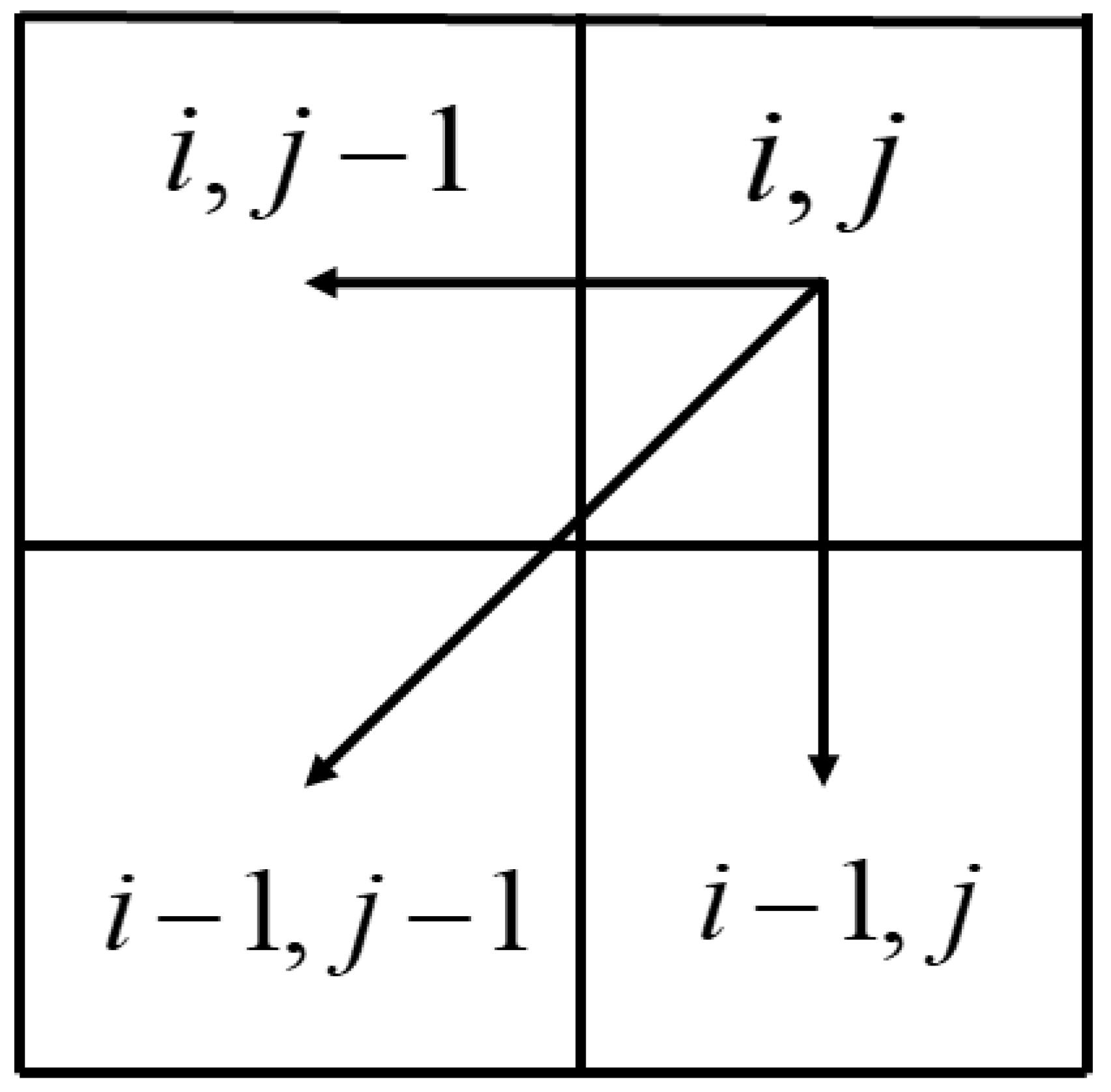
- Accumulation: The global distance matrix is obtained by recursive computation from the alignment error array , and the equation is as follows:Here, the accumulation d is an matrix, the visualization of the formula process is shown in Figure 1, accumulation is the minimum value obtained by summing the alignment errors with , , and , respectively, where 2 is the weight coefficient, which is used to compensate for the displacement from to in the diagonal directions, and can be adjusted appropriately. The essential feature of the algorithm is to decompose a problem into a series of nested subproblems, so each here is recorded as the minimum distance from the initial points to , and similarly, d is the global minimum distance between the template sequence A and the sequence B to be matched.
- 3.
- Backtracking: The path is obtained from the overall distance matrix inversion.Through accumulation , the corresponding temporal relationship between the features of the template sequence A and sequence B to be matched can be inverted step by step, then the matching result can be obtained.
2.1.2. Ricker Wavelet Principle
2.2. Hale’s DTW Algorithm Analysis and Improvement Strategy
- 1.
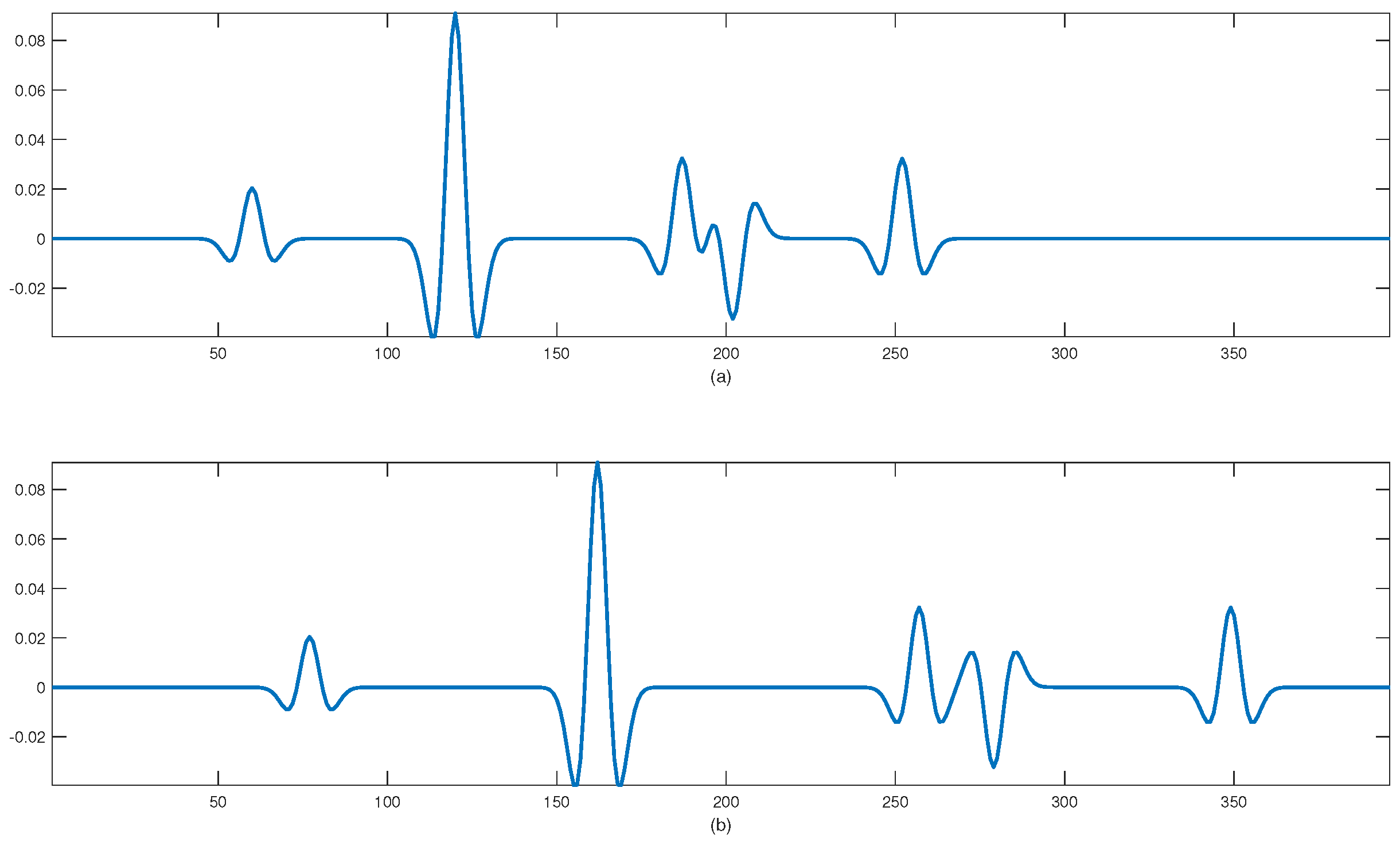
- The synthetic S-wave lost some data after registration.
- 2.
- The synthetic S-wave after registration and the synthetic P-wave were nonmonotonic in the corresponding time sequence.
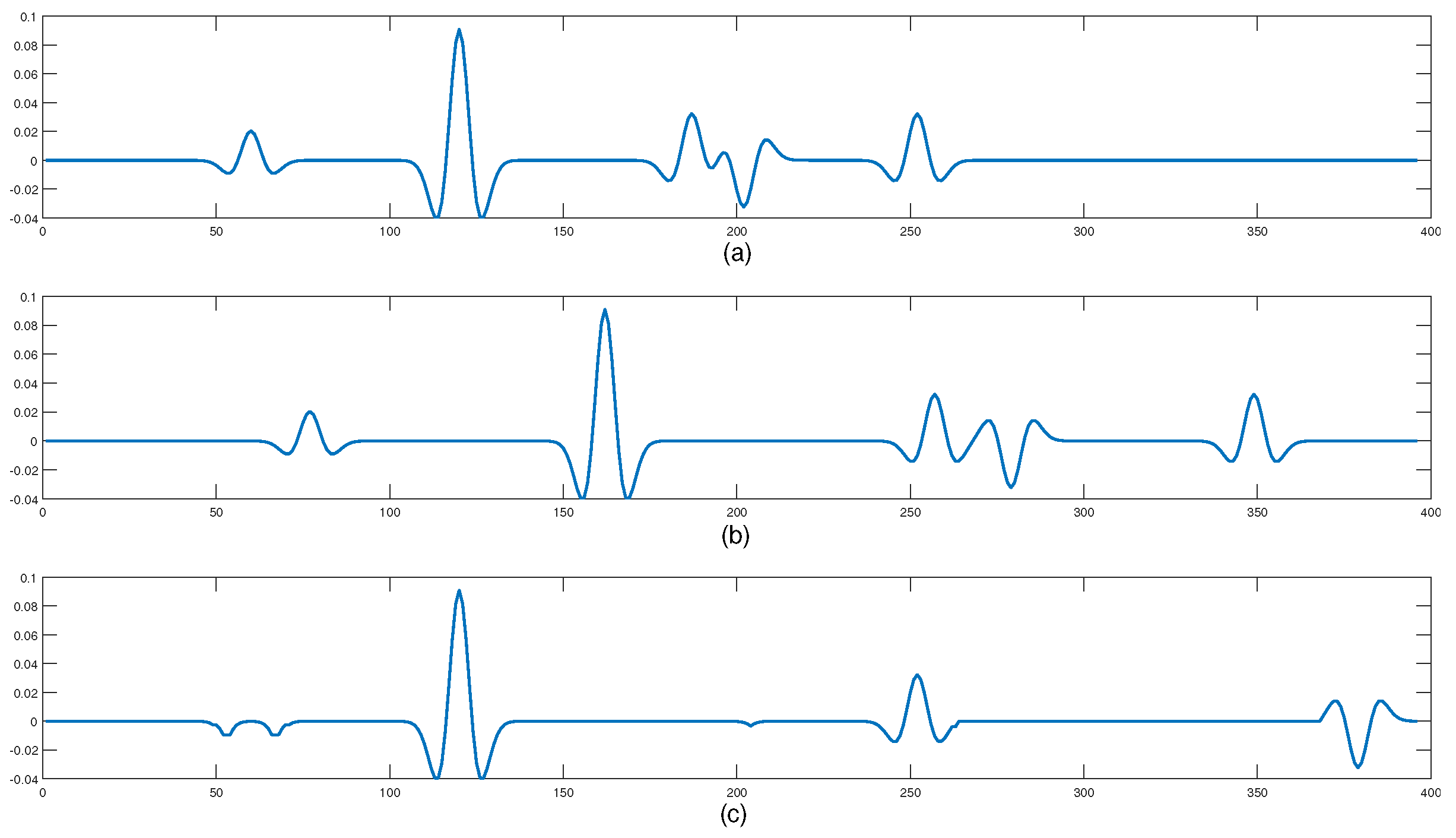
- 3.
- The synthetic S-wave after registration lost some of the data before the synthetic S-wave, which is similar to Problem 1, but for different reasons.
- 1.
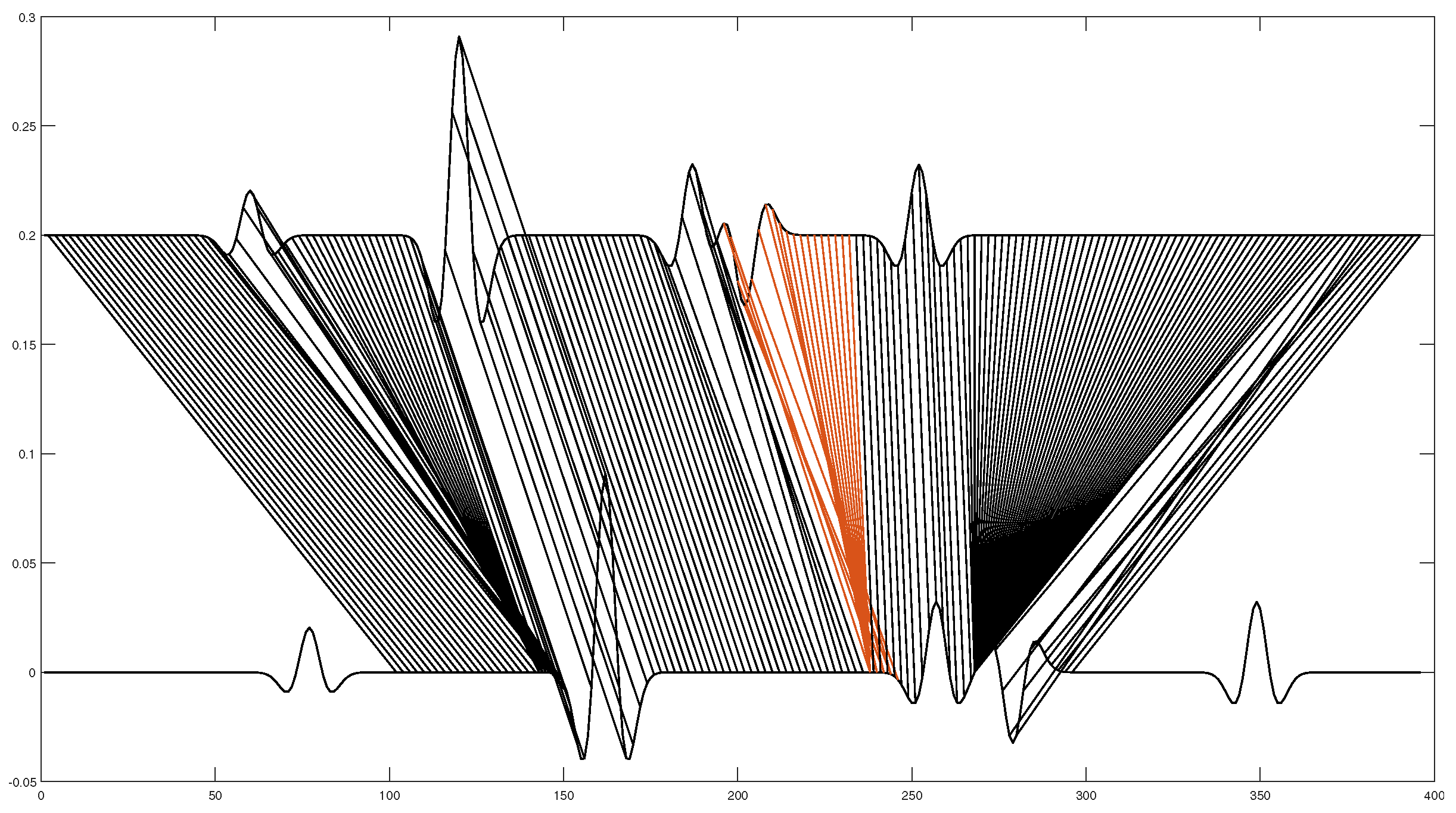
- The time shift u is recorded in the S-wave after registration time point j corresponding to the P-wave time point i.
- 2.
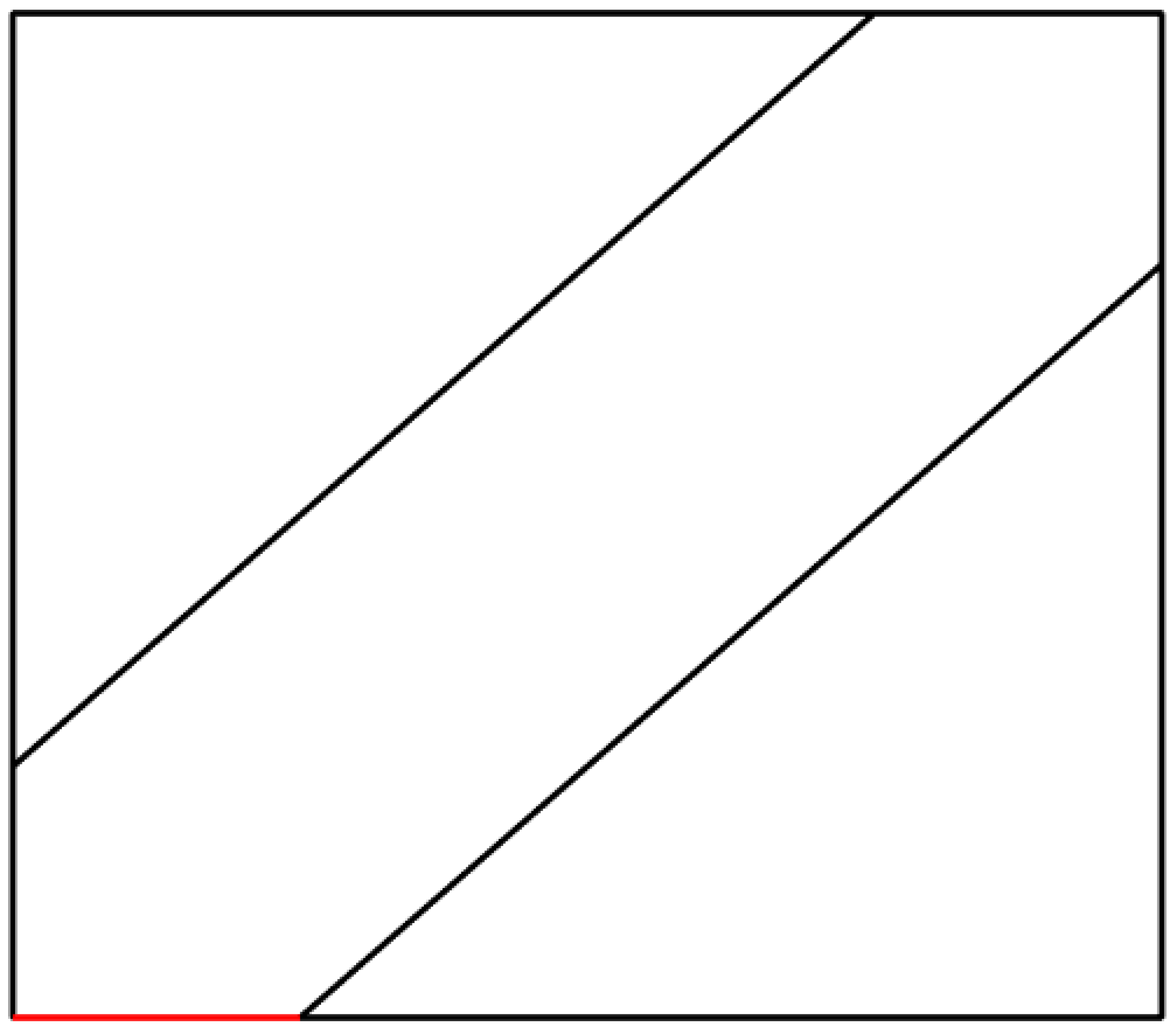
- The slope constraint (Sakoe–Chiba constraint) can limit the registration range of P-wave and S-waves to quasi-diagonal, avoiding extreme situations. Assigning infinite values to areas outside the quasi-diagonal significantly reduces computational complexity and improves registration efficiency. L represents the range of slope constraints, which is the length of the red solid line in Figure 6. The P- and S-wave times between the two parallel lines satisfy .
2.3. Improved DTW Algorithm
- Alignment Errors
- Accumulation
- Backtracking
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| DTW | Dynamic Time Warping |
Appendix A

References
- Gaiser, J.E. Multicomponent vp/vs correlation analysis. Geophysics 1996, 61, 1137–1149. [Google Scholar] [CrossRef]
- Chan, W. Analyzing Converted-Wave Seismic Data: Statics, Interpolation, Imaging, and p-p Correlation. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 1998. [Google Scholar]
- Dok, R.V.; Gaiser, J.E. Stratigraphic description of the morrow formation using mode-converted shear waves: Interpretation tools and techniques for three land surveys. Geophysics 2001, 61, 1042–1047. [Google Scholar]
- Baan, M.V.D.; Kendall, J.M. Estimating anisotropy parameters and traveltimes in the r-p domain. Geophysics 2002, 67, 1076–1086. [Google Scholar] [CrossRef]
- Yuan, J. Analysis of Four-Component Seafloor Seismic Data for Seismic Anisotrophy. Ph.D. Thesis, University of Edinburgh, Edinburgh, UK, 2001. [Google Scholar]
- Garota, R.J. Acquisition/processing—Combined interpretation of pp and ps data provides direct access to elastic rock properties. Geophysics 2002, 21, 532–535. [Google Scholar]
- Deangelo, M. Interpreters’ corner—Depth registration of p-wave and c-wave seismic data for shallow marine sediment characterization, gulf of mexico. Geophysics 2003, 22, 96–105. [Google Scholar]
- Fomel, S.; Backus, M.M. Multicomponent seismic data registration by least squares. In SEG Technical Program Expanded Abstracts; SEG: Houston, TX, USA, 2003; Volume 22, pp. 781–784. [Google Scholar]
- Stewart, R.R.; Gaiser, J.E.; Brown, R.J.; Lawton, D.C. Converted-wave seismic exploration: Applications. Geophysics 2003, 68, 40–57. [Google Scholar] [CrossRef]
- Liner, C.L.; Clapp, R.G. Nonlinear pairwise alignment of seismic traces. Geophysics 2004, 69, 1552–1559. [Google Scholar] [CrossRef]
- Nickel, M.A.; Sonneland, L. Automated ps to pp event regitration and estimation of a high-resolution vp − vs ratio volume. In SEG Technical Program Expanded Abstracts; SEG: Houston, TX, USA, 2004; pp. 869–872. [Google Scholar]
- Fomel, S.; Backus, M.M.; Fouad, K.; Hardage, B.A.; Winters, G. A multistep approach to multicomponent seismic image regitration with application to a west texas carbonate reservoir study. In SEG Technical Program Expanded Abstracts; SEG: Houston, TX, USA, 2005; pp. 1018–1021. [Google Scholar]
- Calert, A.S.; Bloor, R.; Nathan, G.; Yuan, J. Automated C-wave registration by simulated annealing. In SEG Technical Program Expanded Abstracts; SEG: Houston, TX, USA, 2008; Volume 83, pp. 1043–1047. [Google Scholar]
- Fomel, S.; Jin, L. Time-lapse image registration using the local similarity attribute. Geophysics 2009, 74, 2979–2983. [Google Scholar] [CrossRef]
- Wang, H.; Cheng, Y.; Ma, J. Curvelet-based registration of multi-component seismic waves. Geophysics 2014, 104, 90–96. [Google Scholar] [CrossRef]
- Wang, H.; Sacchi, M.D.; Ma, J. Linearized dynamic warping with ll-norm constraint for multi-component registration. Geophysics 2017, 139, 170–176. [Google Scholar]
- Gao, W.; Sacchi, M.D. Multicomponent seismic data registration by nonlinear optimization. Geophysics 2018, 83, V1–V10. [Google Scholar] [CrossRef]
- Sarhan, M.; Hathon, L.A.; Myers, M.; Arad, A. Development of multimodal/multidimensional image registration tools. In Proceedings of the SEG International Meeting for Applied Geoscience & Energy, Houston, TX, USA, 28 August–1 September 2022; pp. 2498–2501. [Google Scholar]
- Mojtabazadeh-Hasanlouei, S.; Panji, M.; Kamalian, M. Attenuated orthotropic time-domain half-space BEM for SH-wave scattering problems. Geophys. J. Int. 2022, 229, 1881–1913. [Google Scholar] [CrossRef]
- Mojtabazadeh-Hasanlouei, S.; Panji, M.; Kamalian, M. Scattering attenuation of transient SH-wave by an orthotropic gaussian-shaped sedimentary basin. Eng. Anal. Bound. Elem. 2022, 140, 186–219. [Google Scholar] [CrossRef]
- Mojtabazadeh-Hasanlouei, S.; Panji, M.; Kamalian, M. A simple TD-BEM model for heterogeneous orthotropic hill-shaped topographies. Discov. Appl. Sci. 2024, 6, 57. [Google Scholar] [CrossRef]
- Caparica, J.F.; de Moraes, F.S. On the use of dynamic time warping for multicomponent seismic data registration. In Proceedings of the 13th International Congress of the Brazilian Geophysical Society, Rio de Janeiro, Brazil, 26–29 August 2013. [Google Scholar]
- Senin, P. Dynamic Time Warping Algorithm Review; Information and Computer Science Department University of Hawaii at Manoa: Honolulu, HI, USA, 2008; Volume 855, pp. 1–23. [Google Scholar]
- Hale, D. Dynamic warping of seismic images. Geophysics 2013, 78, 105–115. [Google Scholar] [CrossRef]
- Complon, S.; Hale, D. Estimating vp/vs ratios using smooth dynamic image warping. Geophysics 2014, 79, 201–215. [Google Scholar] [CrossRef]
- Venstad, J.M. Dynamic time warping—An improved method for 4d and tomography time shift estimation. Geophysics 2014, 79, 209–220. [Google Scholar] [CrossRef]
- Dhara, A.; Bagaini, C. Seismic image registration using multiscale convolutional neural networks. Geophysics 2020, 85, 425–441. [Google Scholar] [CrossRef]
- Sakoe, H.; Chiba, S. Dynamic programming algorithm optimization for spoken word recognition. IEEE Trans. Acoust. Speech Signal Process. 1978, 26, 159–165. [Google Scholar] [CrossRef]
- Geler, Z.; Kurbalia, V.; Ivanović, M.; Radovanović, M. Elastic distances for time-series classification: Itakura versus sakoe-chiba constraints. Knowl. Inf. Syst. 2022, 64, 2797–2832. [Google Scholar] [CrossRef]
- Zhao, Z.; Rao, Y.; Wang, Y. Structure-adapted Multichannel Matching Pursuit for Seismic Trace Decomposition. Geophysics 2023, 180, 851–861. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zheng, Q. Improvement and Application of Hale’s Dynamic Time Warping Algorithm. Symmetry 2024, 16, 645. https://doi.org/10.3390/sym16060645
Wang H, Zheng Q. Improvement and Application of Hale’s Dynamic Time Warping Algorithm. Symmetry. 2024; 16(6):645. https://doi.org/10.3390/sym16060645
Chicago/Turabian StyleWang, Hairong, and Qiufang Zheng. 2024. "Improvement and Application of Hale’s Dynamic Time Warping Algorithm" Symmetry 16, no. 6: 645. https://doi.org/10.3390/sym16060645
APA StyleWang, H., & Zheng, Q. (2024). Improvement and Application of Hale’s Dynamic Time Warping Algorithm. Symmetry, 16(6), 645. https://doi.org/10.3390/sym16060645