
Parameter Identification of Synchronous Condenser and Its Excitation System Considering Multivariate Coupling and Symmetry Characteristic



Abstract
1. Introduction
2. Coupling Variable Set of SCES
2.1. Analysis of Multi-Time-Scale Key Parameters
2.2. Introduction to the Algorithm
3. Parameter Identification Model and Data Preprocess
3.1. Parameter Identification Model at Multiple Time Scales
3.2. Data Noise Preprocessing Method
4. Solution Method Based on Improved SO Method
4.1. Parameter Identification Based on Coupling Variable Set
4.2. Improved SO Method Based on Tent Chaotic Mapping
5. Case Studies
5.1. Parameter Classification and Data Preprocessing
5.2. Comparative Analysis of Parameter Identification Error
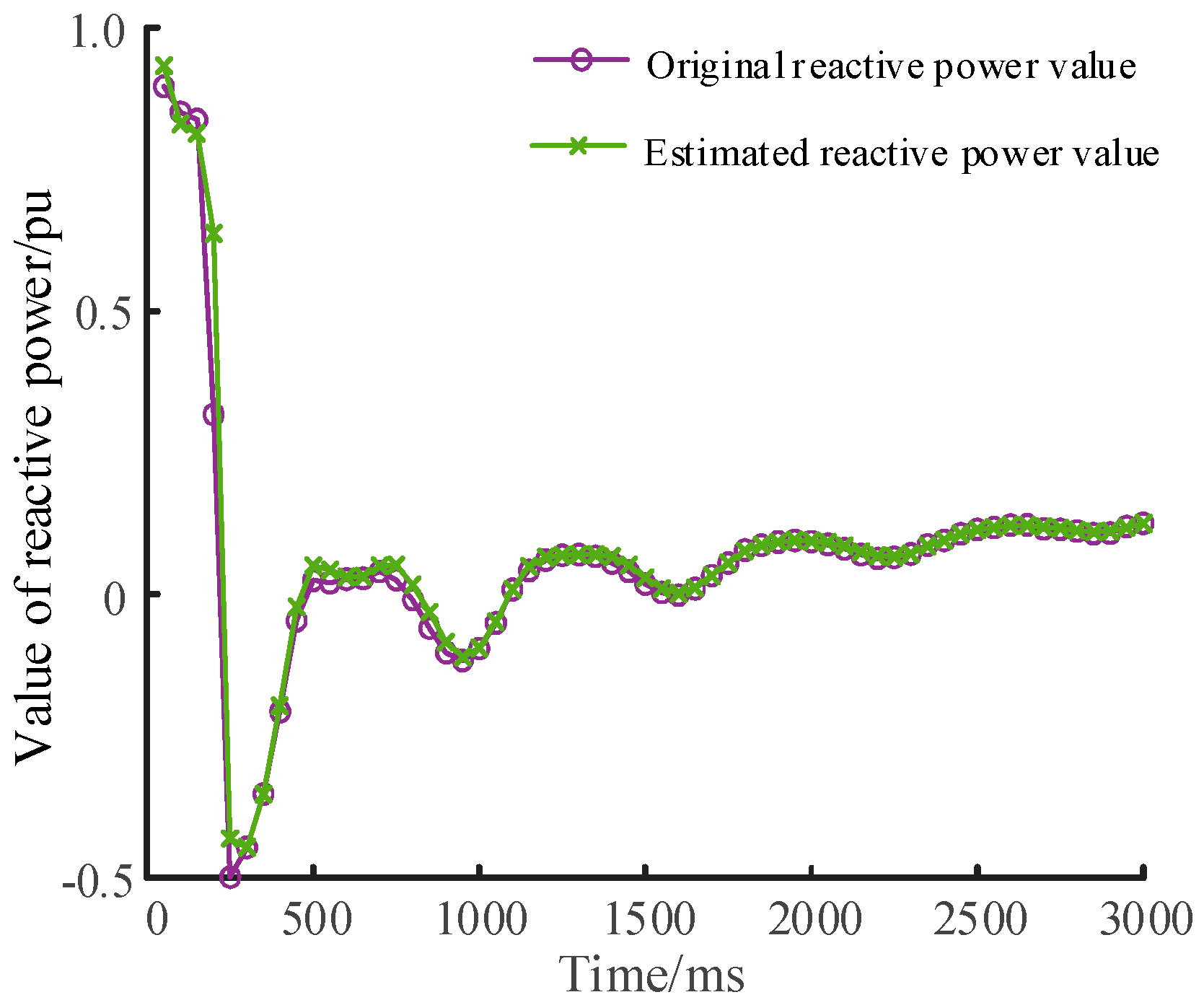
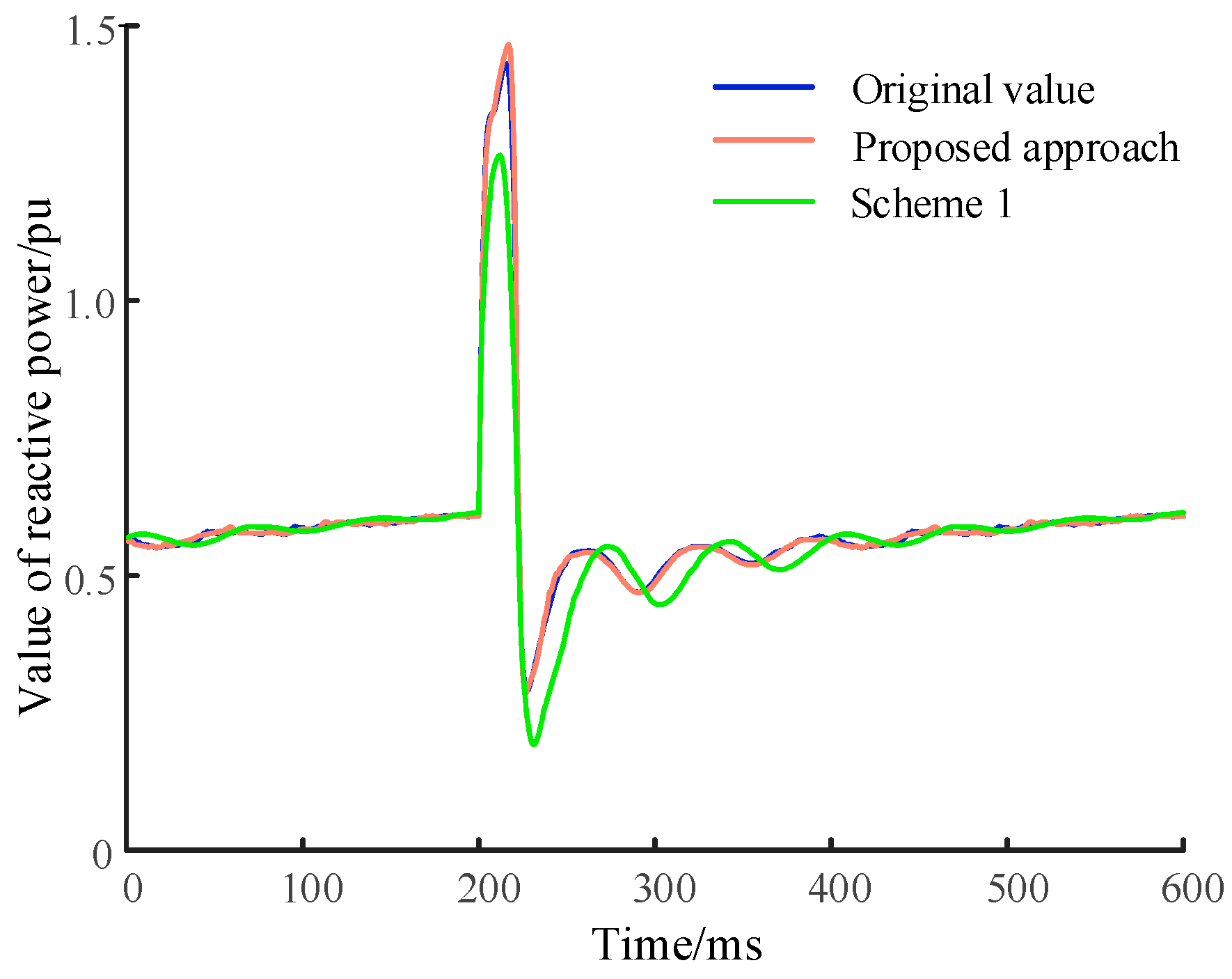
5.3. Comparative Analysis of Reactive Power and Voltage Response
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Q | reactive power output | ω | rotor angular velocity |
| vq | q-axis voltage component | δ | power angle |
| vd | d-axis voltage component | rs | stator resistance |
| iq | d-axis current component | Xad | d-axis armature reaction reactance |
| id | q-axis current component | if0 | excitation current |
| ∆Q | reactive power change | Ψd | real-time d-axis magnetic flux |
| Q0 | initial reactive power | Ψd0 | initial d-axis magnetic flux |
| v | real-time voltage | Ψq | real-time q-axis magnetic flux |
| v0 | initial voltage | Ψq0 | initial q-axis magnetic flux |
| ∆v | voltage change | Tʹd | d-axis time constant |
| id0 | initial d-axis current | E0 | no-load electromotive force |
| Kc | amplification factor of excitation voltage | IS | vector of the steady-state data |
| h(·) | equality constraint equation | E′q | q-axis transient electric force |
| E”q | q-axis sub-transient electric force | E″d | d-axis sub-transient electric force |
| VF | negative feedback voltage | Vref | reference voltage |
| Ka | amplification factor of voltage regulator | Ta | time constant of voltage regulator |
| Ke | amplification factor of excitation winding | Te | time constant of excitation winding |
| Kf | amplification factor of negative feedback loop | Tf | time constant of negative feedback loop |
| Ef | excitation electromotive force | Qe | reactive power output |
| VPSS | supplementary control signal | VR | voltage regulator output |
| ∆id | d-axis current change | Ta | armature time constant |
| Xk | equivalent reactance | y | system output variable |
| T″ds | sub-transient short-circuit time constant | xi | system parameter |
| T′ds | transient short-circuit time constant | Vt | terminal voltage |
| Tas | stator transient time constant | ∆xi | perturbation magnitude |
| Xd | d-axis reactance | y(·) | transfer function |
| X′d | transient reactance | rs | stator resistance |
| X″d | sub-transient reactance | Vt,i | original terminal voltage |
| ∆vq | q-axis voltage change | V’t,i | changed terminal voltage |
| Qe,i | original reactive power | N | the number of sampling points |
| Q′e,i | changed reactive power | SV,i | voltage sensitivity of parameter i |
| EV | voltage error | SQ,i | reactive power sensitivity of parameter i |
| EQ | reactive power error | EV,i,m | voltage error of parameter i at the m-th step change |
| M | the number of steps | EQ,i,m | reactive power error of parameter i at the m-th step change |
| ST | sensitivity deviation threshold | vq0 | steady-state q-axis voltage |
| id0 | steady-state d-axis current | vf0 | excitation voltage |
| if0 | excitation current | XS | vector of the steady-state parameters |
| Vt_est,i | estimated terminal voltage | x | vector corresponding to the state variables in (16) |
| g(·) | algebraic equations in (16) | IZ | vector of the transient data |
| XV | vector corresponding to the voltage-independent parameters in (16) | f(·) | differential equations in (16) |
| XQ | vector of reactive power-independent parameters in (16) | Qe_est,i | estimated reactive power |
| XN | vector of neutral-type parameters in (16) | f(t) | noisy signal |
| x(t) | noise-free signal at time t | n(t) | noise signal at time t |
| j | scaling parameter | k | translation parameter |
| ψ(·) | wavelet basis function | S(·) | scale coefficient |
| W(·) | wavelet coefficient | hr(·) | reconstruction low-pass filter |
| gr(·) | reconstruction high-pass filter | hg(·) | conjugates of hr(·) |
| gg(·) | conjugates of gr(·) | IE | identification accuracy improvement ratio |
| Er,o | relative error of comparison method | Er,n | relative error of proposed approach |
| Z(t) | mapping values at iteration t | µ | chaos parameter |
| Z(j) | mapping value of snake population with sex j | Xi,j | obtained position |
| Xr,j | random position | Aj | hunting ability |
| r | random number between 0 and 1 | fi,j | fitness value corresponding to Xi,j |
| fr,j | fitness value corresponding to Xr,j | c1 | a constant factor |
| Xf | best position of all individuals | c2 | a constant factor |
| Nm | maximum iteration number | c3 | a constant factor |
| Qa | quantity of food available | Xb,j | best position of sex j |
| fb,j | fitness value corresponding to Xb,j | Mj | mating ability of snakes of sex j |
| Mf | mating capability of female snakes | Mm | mating capability of male snakes |
| fi,f | fitness value corresponding to male snakes | fi,m | fitness value corresponding to female snakes |
| T | environmental temperature | Th | temperature threshold |
References
- Zhang, J.; Wang, J.; Cao, Y.; Li, B.; Li, C. A coordinated control strategy of multi-type flexible resources and under-frequency load shedding for active power balance. Symmetry 2024, 16, 479. [Google Scholar] [CrossRef]
- Cao, Y.; Wu, Q.; Li, C.; Jiao, W.; Tan, J. Chance-constrained optimal sizing of BESS with emergency load shedding for frequency stability. Appl. Energy 2024, 367, 123455. [Google Scholar] [CrossRef]
- Wang, W.; Li, G.; Guo, J. Large-scale renewable energy transmission by HVDC: Challenges and proposals. Engineering 2022, 19, 252–267. [Google Scholar] [CrossRef]
- Chen, X.; Wu, P.; He, H.; Song, B.; Qin, K.; Teng, X.; Yang, F.; Li, D. Optimal flexibility dispatching of multi-pumped hydro storage stations considering the uncertainty of renewable energy. Symmetry 2024, 16, 1404. [Google Scholar] [CrossRef]
- Zhang, J.; Ma, R.; Cao, Y.; Zou, S.; Li, C. Quantitative assessment of static voltage stability for power system with high-penetration wind power based on energy function. Energy Rep. 2024, 12, 699–707. [Google Scholar] [CrossRef]
- Jiang, M.; Ma, H.; Zhang, Y.; Chen, X.; Zhao, X. Reactive power characteristics and vibration properties under SISC in synchronous condensers. Int. J. Electr. Power Energy Syst. 2021, 133, 107318. [Google Scholar] [CrossRef]
- Jawad, A. A systematic approach to estimate the frequency support from large-scale PV plants in a renewable integrated grid. Energy Rep. 2022, 8, 940–954. [Google Scholar] [CrossRef]
- Zimmer, V.; Decker, I.C.; ESilva, A.S. A robust approach for the identification of synchronous machine parameters and dynamic states based on PMU data. Electr. Power Syst. Res. 2018, 165, 167–178. [Google Scholar] [CrossRef]
- Oteafy AM, A.; Chiasson, J.N.; Ahmed-Zaid, S. Development and application of a standstill parameter identification technique for the synchronous generator. Int. J. Electr. Power Energy Syst. 2016, 81, 222–231. [Google Scholar] [CrossRef]
- Xiao, Q.; Liao, K.; Shi, C.; Zhang, Y. Parameter identification of direct-drive permanent magnet synchronous generator based on EDMPSO-EKF. IET Renew. Power Gener. 2022, 16, 1073–1086. [Google Scholar] [CrossRef]
- Arastou, A.; Karrari, M.; Zaker, B. New method for synchronous generator parameters estimation using load rejection tests data considering operational limitations. Electr. Power Syst. Res. 2021, 192, 106999. [Google Scholar] [CrossRef]
- Zaker, B.; Khodadadi, A.; Karrari, M. A new approach to parameter identification of generation unit equipped with brushless exciter using estimated field voltage. Int. J. Electr. Power Energy Syst. 2022, 141, 108122. [Google Scholar] [CrossRef]
- Wang, Z.; Chai, J.; Xiang, X.; Sun, X.; Lu, H. A novel online parameter identification method designed for deadbeat current control of the permanent-magnet synchronous motor. IEEE Trans. Ind. Appl. 2021, 58, 2029–2041. [Google Scholar] [CrossRef]
- Micev, M.; Ćalasan, M.; Aleem, S.H.; Hasanien, H.M.; Petrović, D.S. Two novel approaches for identification of synchronous machine parameters from short-circuit current waveform. IEEE Trans. Ind. Electron. 2021, 69, 5536–5546. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, J. Parameter identification with synchrophasor trajectory fitting technique for sub-/super-synchronous oscillations. IEEE Trans. Power Syst. 2022, 37, 3181–3184. [Google Scholar] [CrossRef]
- Li, X.; Kennel, R. General formulation of Kalman-filter-based online parameter identification methods for VSI-fed PMSM. IEEE Trans. Ind. Electron. 2020, 68, 2856–2864. [Google Scholar] [CrossRef]
- Guo, Q.; Gao, L.; Chu, X.; Sun, H. Parameter identification for static var compensator model using sensitivity analysis and improved whale optimization method. CSEE J. Power Energy Syst. 2022, 8, 535–547. [Google Scholar]
- Chen, C.; Li, C.; Liao, C.; Wang, L. Parameter identification of capacitive power transfer system based on spectrum analysis. CPSS Trans. Power Electron. Appl. 2018, 3, 181–186. [Google Scholar] [CrossRef]
- Guddanti, B.; Orrego, J.R.; Roychowdhury, R.; Illindala, M.S. Sensitivity analysis based identification of key parameters in the dynamic model of a utility-scale solar PV plant. IEEE Trans. Power Syst. 2021, 37, 1340–1350. [Google Scholar] [CrossRef]
- Wang, A.; Zheng, Z.; Zheng, J. Parameter identification of synchronous condenser based on sensitivity analysis of parameters. In Proceedings of the 2017 China International Electrical and Energy Conference (CIEEC), Beijing, China, 25–27 October 2017; pp. 725–730. [Google Scholar]
- Zaker, B.; Gharehpetian, G.B.; Karrari, M.; Moaddabi, N. Simultaneous parameter identification of synchronous generator and excitation system using online measurements. IEEE Trans. Smart Grid 2015, 7, 1230–1238. [Google Scholar] [CrossRef]
- Kimbark E, W. Power System Stability; John Wiley & Sons: Hoboken, NJ, USA, 1995. [Google Scholar]
- Kyriakides, E.; Heydt, G.T.; Vittal, V. On-line estimation of synchronous generator parameters using a damper current observer and a graphic user interface. IEEE Trans. Energy Convers. 2004, 19, 499–507. [Google Scholar] [CrossRef]
- Mitra, A.; Mohapatra, A.; Chakrabarti, S.; Sarkar, S. Online measurement based joint parameter estimation of synchronous generator and exciter. IEEE Trans. Energy Convers. 2020, 36, 820–830. [Google Scholar] [CrossRef]
- Desai, J.P.; Makwana, V.H. A novel out of step relaying method based on wavelet transform and a deep learning machine model. Prot. Control. Mod. Power Syst. 2021, 6, 1–12. [Google Scholar] [CrossRef]
- Zhao, W.; Shang, L.; Sun, J. Power quality disturbance classification based on time-frequency domain multi-feature and decision tree. Prot. Control. Mod. Power Syst. 2019, 4, 27. [Google Scholar] [CrossRef]
- Hashim, F.A.; Hussien, A.G. Snake Optimizer: A novel meta-heuristic optimization method. Knowl.-Based Syst. 2022, 242, 108320. [Google Scholar] [CrossRef]
- Zhu, C.; Sun, K. Cryptanalyzing and improving a novel color image encryption method using RT-enhanced chaotic tent maps. IEEE Access 2018, 6, 18759–18770. [Google Scholar] [CrossRef]
- He, S.; Fu, L.; Lu, Y.; Wu, X.; Wang, H.; Sun, K. Analog circuit of a simplified Tent map and its application in sensor position optimization. IEEE Trans. Circuits Syst. II Express Briefs 2022, 70, 885–888. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Xd | 1.305 | Xl | 0.18 |
| X′d | 0.296 | T′d | 7.01 |
| X″d | 0.252 | T″d | 0.053 |
| Xq | 1.300 | T″q0 | 0.1 |
| X″q | 0.243 | Rs | 0.002854 |
| Tr | 0.002 | Kf | 0.2 |
| Ka | 300 | Tf | 0.1 |
| Ta | 0.3 | Efmin | −11.5 |
| Ke | 1 | Efmax | 11.5 |
| Te | 0.3 | Kp | 0 |
| Tb | 0 | Vt0 | 1 |
| Tc | 0 | Vf0 | 1.29 |
| Parameter | Voltage Sensitivity SV | Reactive Power Sensitivity SQ | Parameter | Voltage Sensitivity SV | Reactive Power Sensitivity SQ |
|---|---|---|---|---|---|
| X′d | 2.6044 | 7.0363 | Ta | 2.0662 | 2.4714 |
| X″d | 3.7357 | 3.5789 | Kf | 2.6348 | 3.0097 |
| T′d0 | 2.4388 | 2.4798 | Tf | 4.4414 | 3.1904 |
| T″d0 | 3.3031 | 1.7630 | Ke | 2.5640 | 1.3667 |
| Ka | 3.6715 | 2.0412 | Te | 3.2497 | 1.6479 |
| Parameter | Type | Parameter | Type |
|---|---|---|---|
| X′d | RTPS | Ta | RTPS |
| X″d | VTPS | Kf | RTPS |
| T′d0 | NTPS | Tf | VTPS |
| T″d0 | VTPS | Ke | VTPS |
| Ka | VTPS | Te | VTPS |
| Parameter | Real Value | Identification Result | Identification Error |
|---|---|---|---|
| Xd | 1.305 | 1.3137 | 0.667% |
| K | 0.998 | 1.0012 | 0.321% |
| Type | Parameter | Real Value | Scheme 1 | Identification Error | Proposed Approach | Identification Error |
|---|---|---|---|---|---|---|
| VTPS | X″d | 0.252 | 0.263 | 0.56% | 0.252 | 0.08% |
| T″d0 | 0.053 | 0.064 | 5.66% | 0.053 | 0.76% | |
| Ka | 300 | 293.87 | 2.04% | 296.73 | 1.09% | |
| Tf | 0.1 | 0.090 | 3.90% | 0.108 | 7.80% | |
| Ke | 1 | 0.900 | 9.99% | 1.030 | 3.04% | |
| Te | 0.3 | 0.278 | 7.27% | 0.319 | 6.50% | |
| RTPS | X′d | 0.296 | 0.306 | 3.38% | 0.290 | 1.96% |
| Ta | 0.3 | 0.315 | 5.03% | 0.301 | 0.17% | |
| Kf | 0.2 | 0.204 | 2.15% | 0.196 | 2.25% | |
| NTPS | T′d0 | 7.01 | 6.013 | 14.2% | 6.890 | 1.71% |
| Parameter | Improvement Ratio IE | Parameter | Improvement Ratio IE |
|---|---|---|---|
| X′d | 0.420 | Ta | 0.967 |
| X″d | 0.867 | Kf | −0.047 |
| T′d0 | 0.880 | Tf | −1.000 |
| T″d0 | 0.867 | Ke | 0.696 |
| Ka | 0.467 | Te | 0.106 |
| Method | RMES of Voltage | RMES of Reactive Power |
|---|---|---|
| Scheme 1 | 0.0340 | 0.0510 |
| Proposed approach | 0.0126 | 0.0083 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Song, Y.; Liu, X.; Li, C. Parameter Identification of Synchronous Condenser and Its Excitation System Considering Multivariate Coupling and Symmetry Characteristic. Symmetry 2024, 16, 1596. https://doi.org/10.3390/sym16121596
Cao Y, Song Y, Liu X, Li C. Parameter Identification of Synchronous Condenser and Its Excitation System Considering Multivariate Coupling and Symmetry Characteristic. Symmetry. 2024; 16(12):1596. https://doi.org/10.3390/sym16121596
Chicago/Turabian StyleCao, Yongji, Yuman Song, Xiaoming Liu, and Changgang Li. 2024. "Parameter Identification of Synchronous Condenser and Its Excitation System Considering Multivariate Coupling and Symmetry Characteristic" Symmetry 16, no. 12: 1596. https://doi.org/10.3390/sym16121596
APA StyleCao, Y., Song, Y., Liu, X., & Li, C. (2024). Parameter Identification of Synchronous Condenser and Its Excitation System Considering Multivariate Coupling and Symmetry Characteristic. Symmetry, 16(12), 1596. https://doi.org/10.3390/sym16121596