
Offloading Strategy for Forest Monitoring Network Based on Improved Beetle Optimization Algorithm
 and
and
Abstract
1. Introduction
- A forest monitoring network task offloading model was designed to study the decision-making problem of sensor task offloading in the monitoring network. A method was proposed to simulate the impact of complex underground environments in mountainous forests on communication rates by incorporating path loss and multipath fading effects. The offloading decision problem of rational resource allocation is formulated as a multi-constraint minimum cost (consisting of latency and energy consumption) optimization problem to be solved.
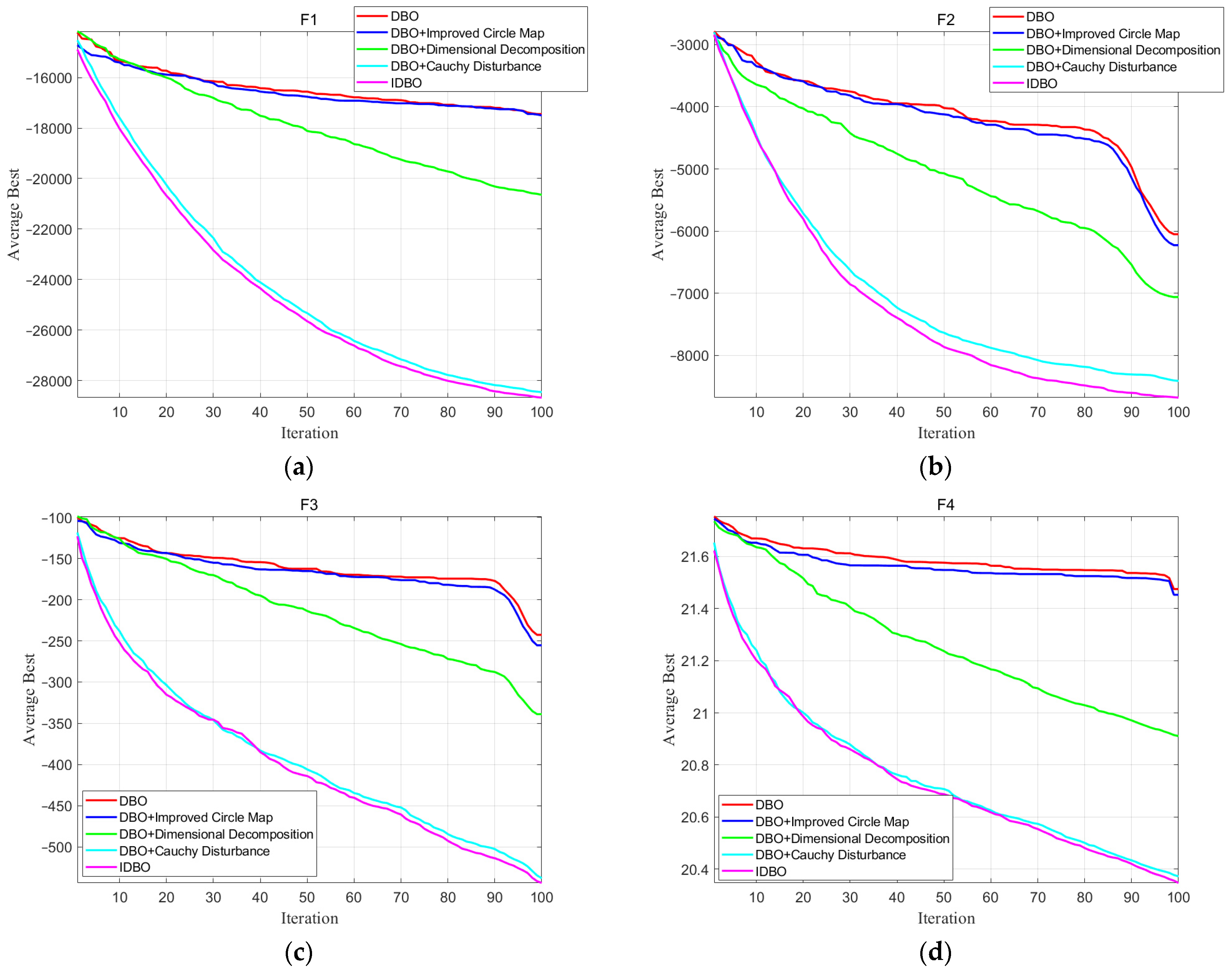
- The cost optimization problem with multiple constraints is an NP-hard problem, and we propose the DBO algorithm to solve it. We improve the algorithm using an improved circle chaotic map, dimension decomposition strategy, and Cauchy perturbation strategy and demonstrate the effectiveness of the improvement measures using test functions.
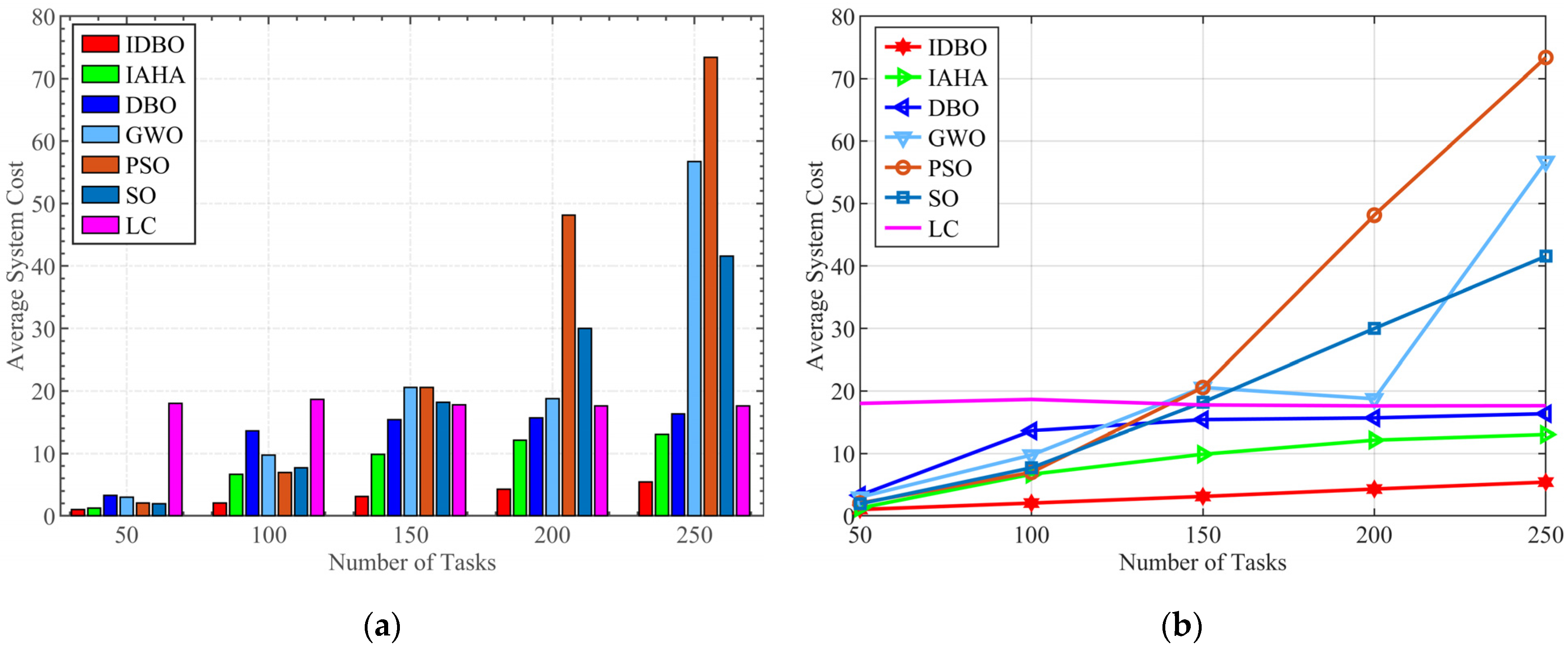
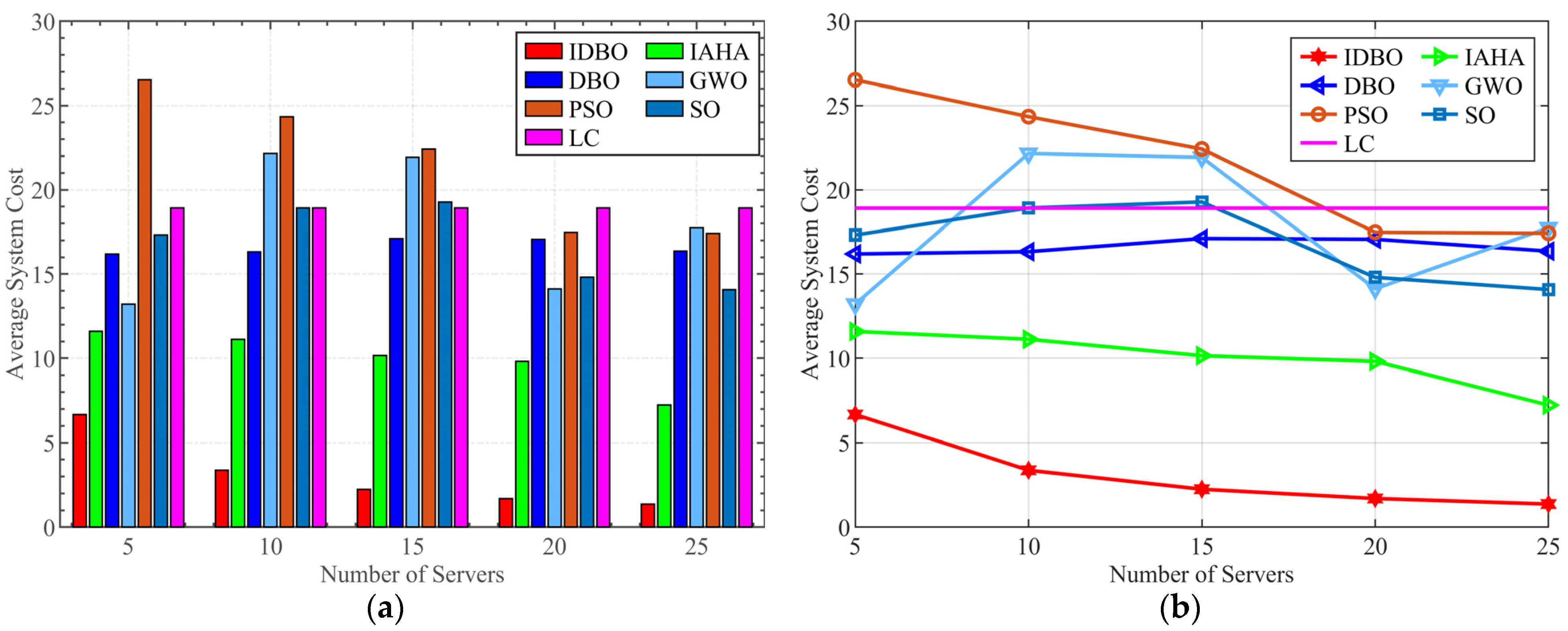
- Design simulation experiments to showcase the effectiveness of the IDBO algorithm in offloading tasks in forest monitoring networks. The experimental results show that, compared with local computing and other heuristic algorithms, the IDBO algorithm has excellent performance in offloading tasks in forest monitoring networks and can make better decisions. Finally, we discussed the limitations of IDBO and future work.
2. Related Work
3. System Model
3.1. Scenario Desccription
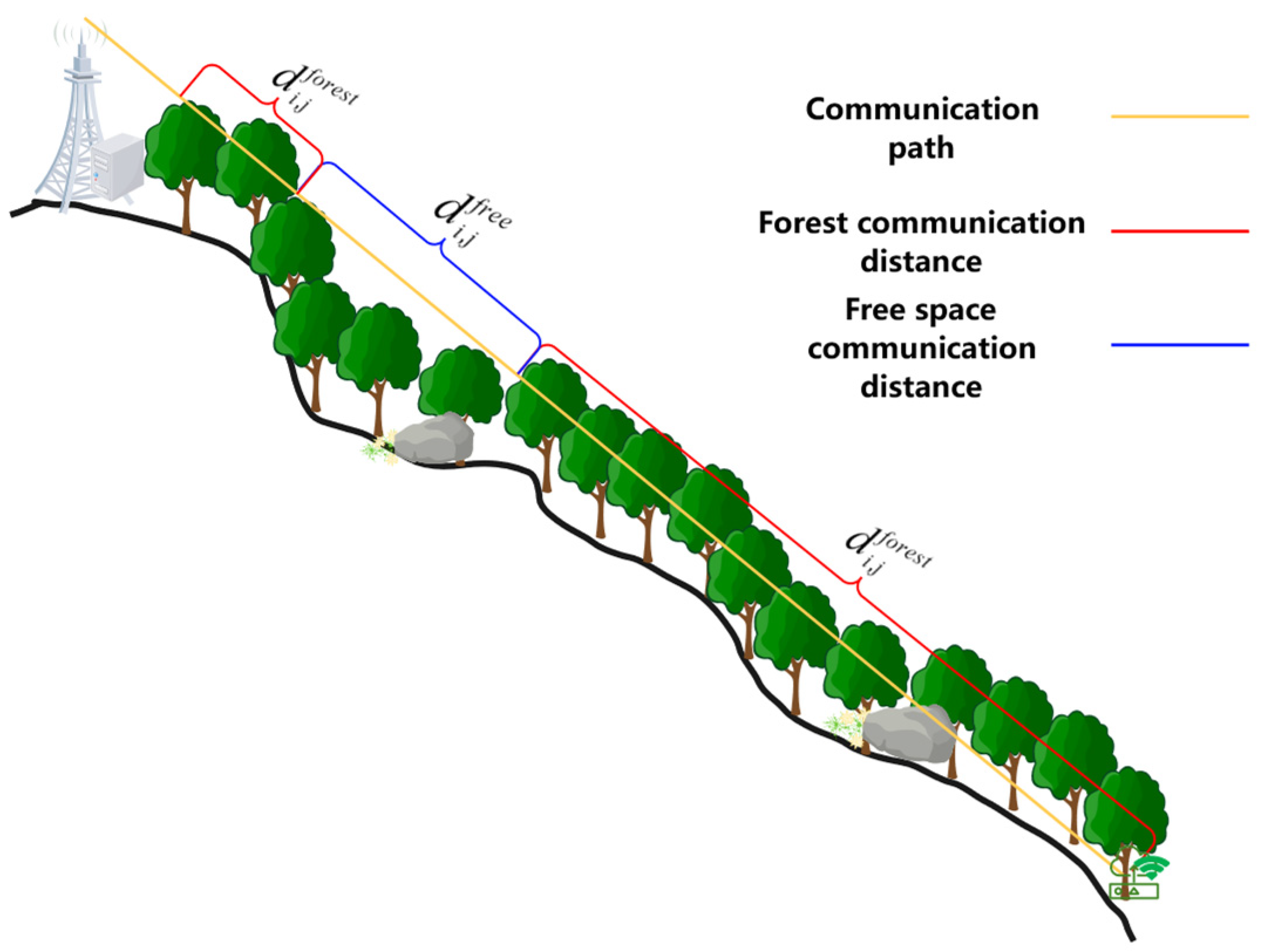
3.2. Communication Model
3.3. Delay Model
3.4. Energy Consumption Model
4. Problem Formulation and Solution
4.1. Problem Formulation
4.2. Problem Analysis
4.3. Computing Offloading Strategy Based on DBO
4.3.1. Algorithm Coding
4.3.2. Algorithm Fitness
4.3.3. Offloading Strategy Based on Dung Beetle Optimization
4.4. Improved Beetle Swarm Optimization Algorithm
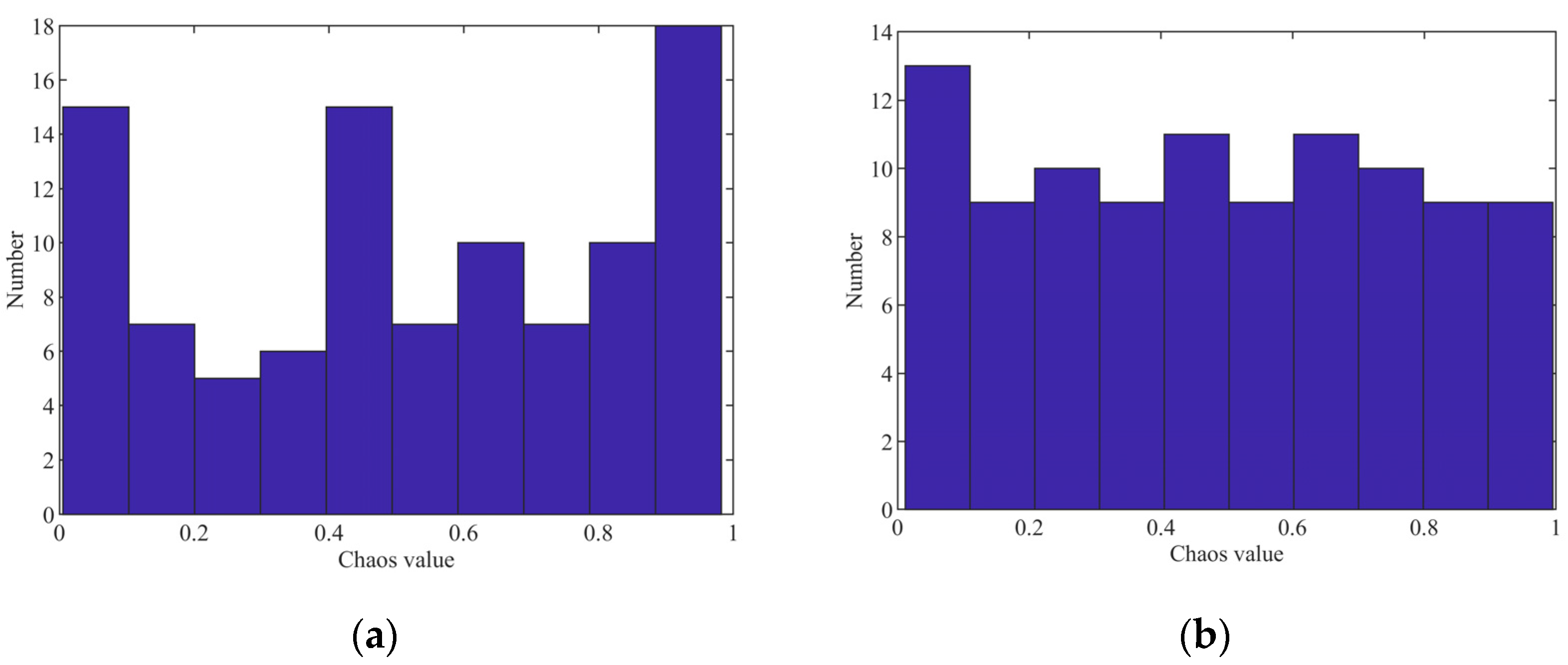
4.4.1. IDBO Population Initialization
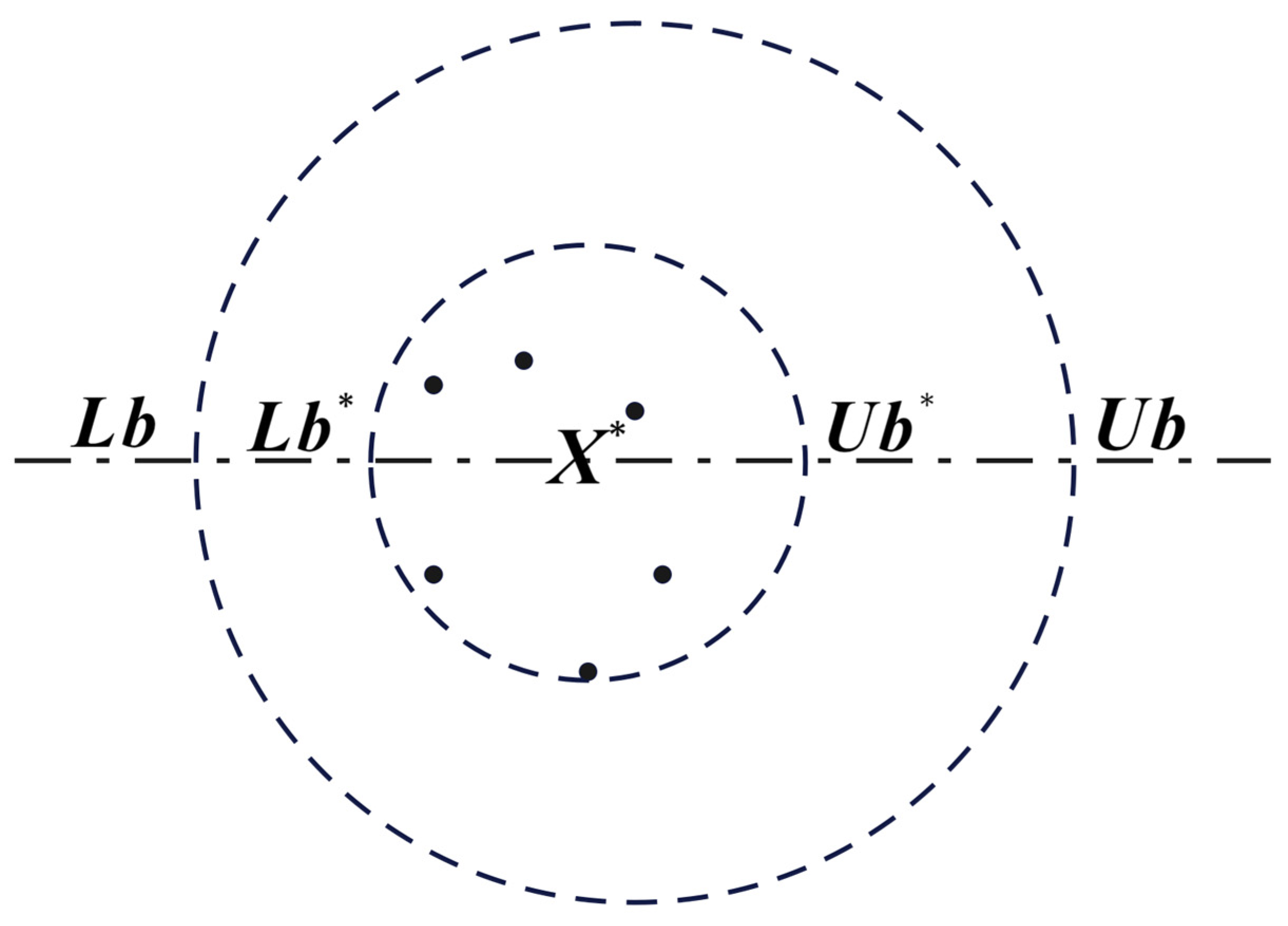
4.4.2. Dimensional Decomposition
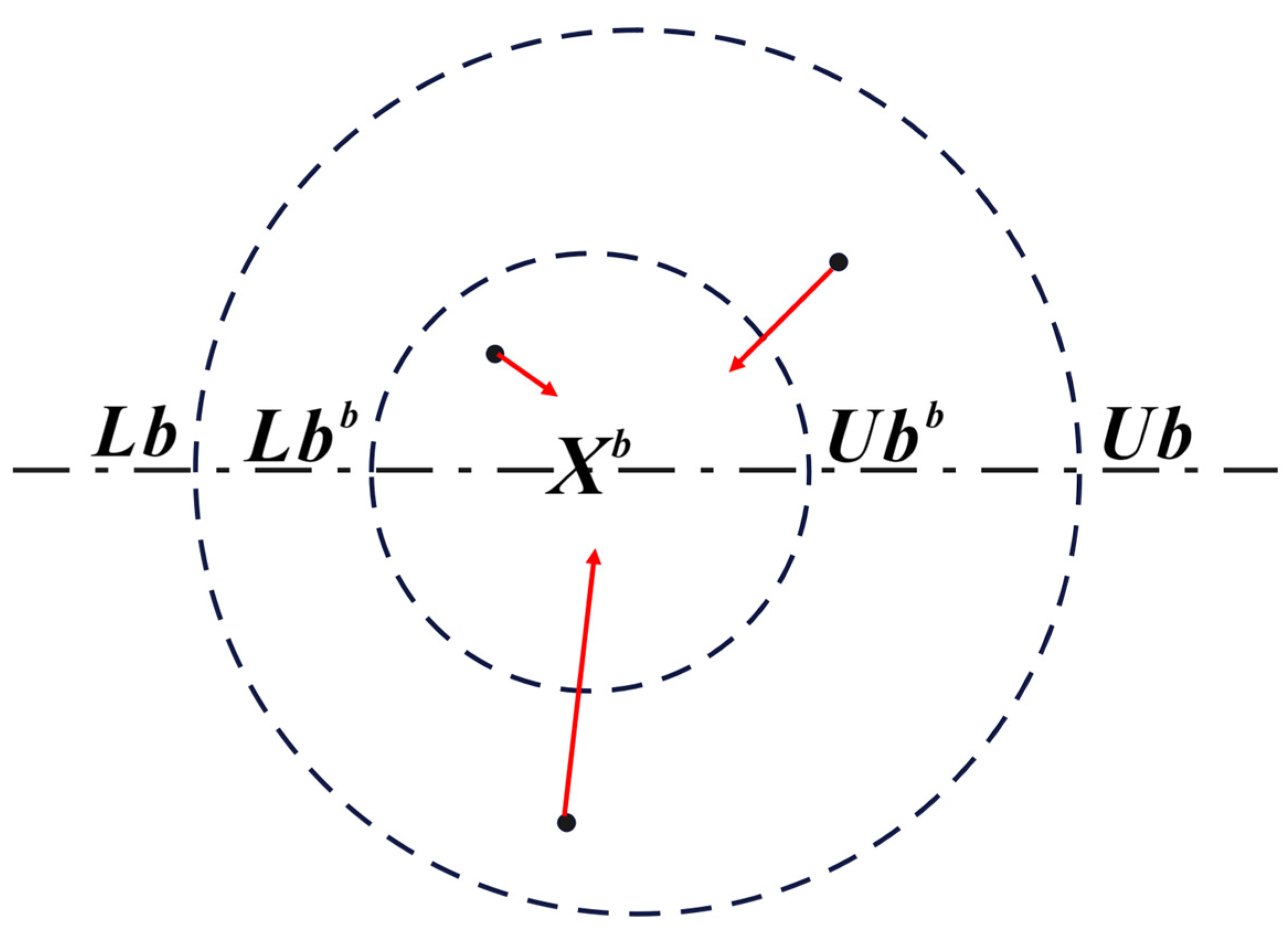
4.4.3. Cauchy Disturbance
4.4.4. Comparative Analysis and Execution Process
| Algorithm 1. The framework of the IDBO algorithm |
| Input: The maximum iteration , the size of the population , the number of tasks , the number of tasks . |
Output: Optimal position and its fitness value .
|
4.5. Time Complexity Analysis of IDBO
5. Simulation Results and Discussion
5.1. Simulation Designs
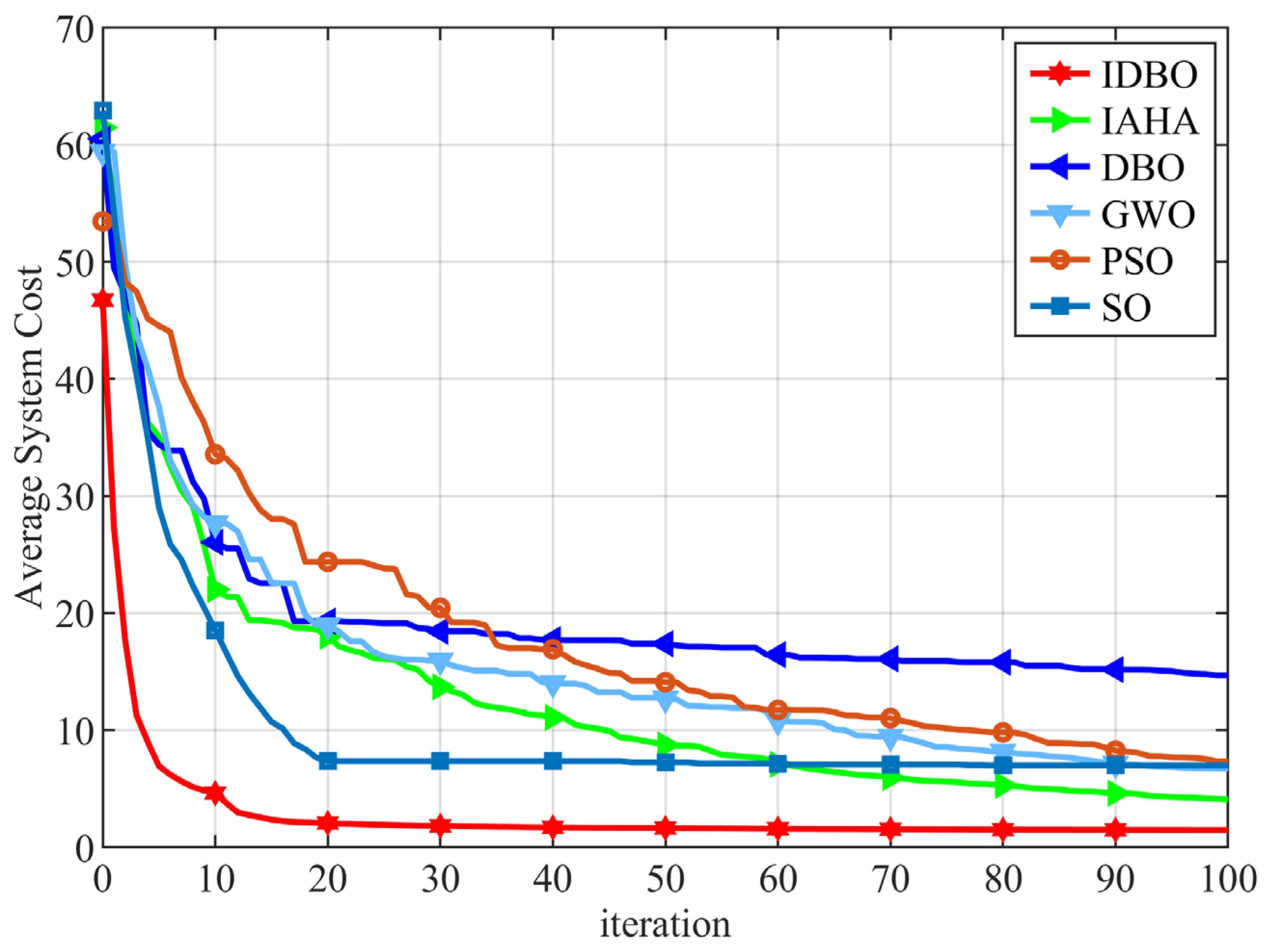
5.2. Convergence Analysis
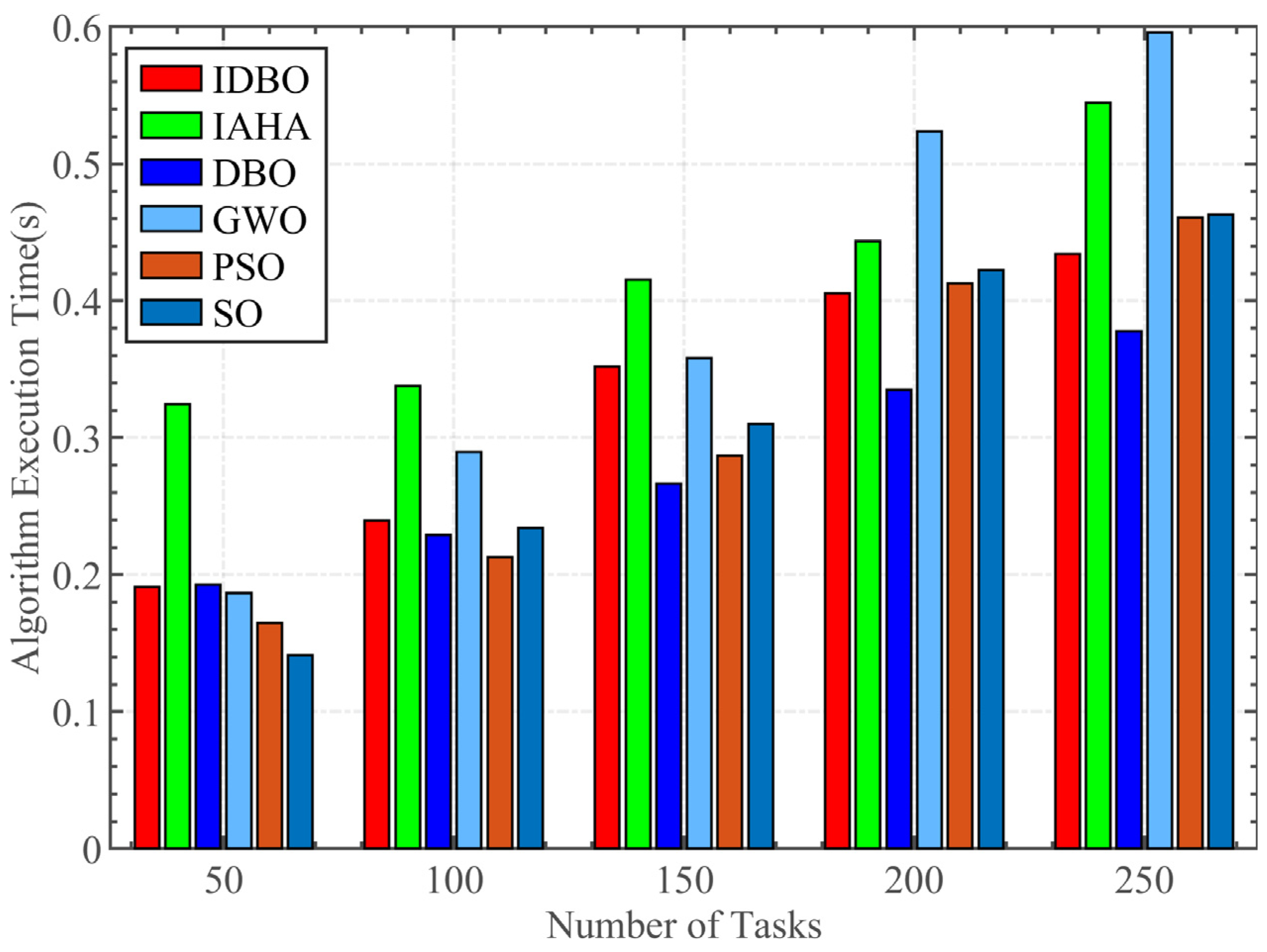
5.3. Execution Time Comparision Analysis
5.4. Comparative Analysis of Offloading Results on Different Task Numbers
5.5. Comparative Analysis of Resource Allocation Capabilities Among Various Algorithms
6. Practical Significance and Limitations of IDBO in Forest Monitoring System
7. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dima, A. Short History of Manufacturing: From Industry 1.0 to Industry 4.0. 2021. Available online: https://kfactory.eu/the-industrial-revolution-short-history-of-manufacturing/ (accessed on 20 December 2023).
- Mach, P.; Becvar, Z. Mobile edge computing: A survey on architecture and computation offloading. IEEE Commun. Surv. Tutor. 2017, 19, 1628–1656. [Google Scholar] [CrossRef]
- Lyu, Y.; Liu, Z.; Fan, R.; Zhan, C.; Hu, H.; An, J. Optimal computation offloading in collaborative LEO-IoT enabled MEC: A multiagent deep reinforcement learning approach. IEEE Trans. Green Commun. Netw. 2022, 7, 996–1011. [Google Scholar] [CrossRef]
- Chen, C.; Li, H.; Li, H.; Fu, R.; Liu, Y.; Wan, S. Efficiency and fairness oriented dynamic task offloading in internet of vehicles. IEEE Trans. Green Commun. Netw. 2022, 6, 1481–1493. [Google Scholar] [CrossRef]
- Postolache, O.; Hemanth, D.J.; Alexandre, R.; Gupta, D.; Geman, O.; Khanna, A. Remote monitoring of physical rehabilitation of stroke patients using IoT and virtual reality. IEEE Trans. Green Commun. Netw. 2020, 39, 562–573. [Google Scholar] [CrossRef]
- Zavalyshyn, I.; Duarte, N.O.; Santos, N. HomePad: A privacy-aware smart hub for home environments. In Proceedings of the 2018 IEEE/ACM Symposium on Edge Computing (SEC), Bellevue, WA, USA, 25–27 October 2018; pp. 58–73. [Google Scholar]
- Tang, H.; Wu, H.; Qu, G.; Li, R. Double deep Q-network based dynamic framing offloading in vehicular edge computing. IEEE Trans. Netw. Sci. Eng. 2022, 10, 1297–1310. [Google Scholar] [CrossRef]
- Hazra, A.; Rana, P.; Adhikari, M.; Amgoth, T. Fog computing for next-generation internet of things: Fundamental, state-of-the-art and research challenges. Comput. Sci. Rev. 2023, 48, 100549. [Google Scholar] [CrossRef]
- Xiao, Z.; Shu, J.; Jiang, H.; Min, G.; Chen, H.; Han, Z. Perception task offloading with collaborative computation for autonomous driving. IEEE J. Sel. Areas Commun. 2022, 41, 457–473. [Google Scholar] [CrossRef]
- Luo, Q.; Hu, S.; Li, C.; Li, G.; Shi, W. Resource scheduling in edge computing: A survey. IEEE Commun. Surv. Tutor. 2021, 23, 2131–2165. [Google Scholar] [CrossRef]
- Sun, L.; Wan, L.; Wang, X. Learning-based resource allocation strategy for industrial IoT in UAV-enabled MEC systems. IEEE Trans. Ind. Inform. 2020, 17, 5031–5040. [Google Scholar] [CrossRef]
- Michael, A.O. Further investigation into VHF radio wave propagation loss over long forest channel. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2013, 2, 705–710. [Google Scholar]
- Akhlaqi, M.Y.; Hanapi, Z.B.M. Task offloading paradigm in mobile edge computing-current issues, adopted approaches, andfuture directions. J. Netw. Comput. Appl. 2023, 212, 103568. [Google Scholar] [CrossRef]
- Feng, C.; Han, P.; Zhang, X.; Yang, B.; Liu, Y.; Guo, L. Computation offloading in mobile edge computing networks: A survey. J. Netw. Comput. Appl. 2022, 202, 103366. [Google Scholar] [CrossRef]
- Tang, S.; Yu, Y.; Wang, H.; Wang, G.; Chen, W.; Xu, Z.; Guo, S.; Gao, W. A survey on scheduling techniques in computing and network convergence. J. Netw. Comput. Appl. 2023, 26, 160–195. [Google Scholar] [CrossRef]
- Yang, G.; Hou, L.; He, X.; He, D.; Chan, S.; Guizani, M. Offloading time optimization via Markov decision process in mobile-edge computing. IEEE Internet Things J. 2020, 8, 2483–2493. [Google Scholar] [CrossRef]
- Huang, L.; Zhang, L.; Yang, S.; Qian, L.P.; Wu, Y. Meta-learning based dynamic computation task offloading for mobile edge computing networks. IEEE Commun. Lett. 2020, 25, 1568–1572. [Google Scholar] [CrossRef]
- Dai, Y.; Zhang, K.; Maharjan, S.; Zhang, Y. Edge intelligence for energy-efficient computation offloading and resource allocation in 5G beyond. IEEE Trans. Veh. Technol. 2020, 69, 12175–12186. [Google Scholar] [CrossRef]
- Guo, H.; Liu, J. Collaborative computation offloading for multiaccess edge computing over fiber–wireless networks. IEEE Trans.Veh. Technol. 2018, 67, 4514–4526. [Google Scholar] [CrossRef]
- Dong, S.; Xia, Y.; Kamruzzaman, J. Quantum particle swarm optimization for task offloading in mobile edge computing. IEEE Trans. Ind. Inform. 2022, 19, 9113–9122. [Google Scholar] [CrossRef]
- Mahenge, M.P.J.; Li, C.; Sanga, C.A. Energy-efficient task offloading strategy in mobile edge computing for resource-intensivemobile applications. Digit. Commun. Netw. 2022, 8, 1048–1058. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, H.; Ji, H.; Li, X.; Leung, V.C. An efficient computation offloading management scheme in the densely deployed small cell networks with mobile edge computing. IEEE-ACM Trans. Netw. 2018, 26, 2651–2664. [Google Scholar] [CrossRef]
- Deng, X.; Yin, J.; Guan, P.; Xiong, N.N.; Zhang, L.; Mumtaz, S. Intelligent delay-aware partial computing task offloading formultiuser industrial Internet of Things through edge computing. IEEE Internet Things J. 2021, 10, 2954–2966. [Google Scholar] [CrossRef]
- Chen, C.; Zeng, Y.; Li, H.; Liu, Y.; Wan, S. A multihop task offloading decision model in MEC-enabled internet of vehicles. IEEE Internet Things J. 2022, 10, 3215–3230. [Google Scholar] [CrossRef]
- Yu, Z.; Gong, Y.; Gong, S.; Guo, Y. Joint task offloading and resource allocation in UAV-enabled mobile edge computing. IEEE Internet Things J. 2020, 7, 3147–3159. [Google Scholar] [CrossRef]
- Zhao, J.; Liu, X.; Tian, M. An efficient task offloading method for drip irrigation and fertilization at edge nodes based on quantum chaotic genetic algorithm. AIP Adv. 2024, 14, 015011. [Google Scholar] [CrossRef]
- Goldsmith, A. Wireless Communications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Myagmardulam, B.; Tadachika, N.; Takahashi, K.; Miura, R.; Ono, F.; Kagawa, T.; Shan, L.; Kojima, F. Path loss prediction model development in a mountainous forest environment. IEEE Open J. Commun. Soc. 2021, 2, 2494–2501. [Google Scholar] [CrossRef]
- Fu, Y.; Yang, X.; Yang, P.; Wong, A.K.; Shi, Z.; Wang, H.; Quek, T.Q. Energy-efficient offloading and resource allocation for mobile edge computing enabled mission-critical internet-of-things systems. EURASIP J. Wirel. Commun. Netw. 2021, 2021, 26. [Google Scholar] [CrossRef]
- Zhan, W.; Luo, C.; Min, G.; Wang, C.; Zhu, Q.; Duan, H. Mobility-aware multi-user offloading optimization for mobile edgecomputing. IEEE Trans. Veh. Technol. 2020, 69, 3341–3356. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. Dung beetle optimizer: A new meta-heuristic algorithm for global optimization. J. Supercomput. 2023, 79, 7305–7336. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Hashim, F.A.; Hussien, A.G. Snake Optimizer: A novel meta-heuristic optimization algorithm. Knowl. Based Syst. 2022, 242, 108320. [Google Scholar] [CrossRef]
- Yang, J.; Tang, D.; Li, .J.; Xiao, Y. Task Offloading Strategy of MEC Based on Improved Artificial Humming Bird Algorithm. Comput. Eng. 2024, 50, 291–301. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameters | Value |
|---|---|
| The channel bandwidth | 20 MHz |
| Signal frequency | 2.4 GHz |
| Background noise | |
| Sensor chip structural power coefficient | |
| The transmission power of UEs | 0.1–1 W |
| The number of SBSs | 5–25 |
| The number of Sensors | 50–250 |
| Data size to offload | 500–3000 KB |
| CPU cycles of per bit of offloading task | 400–1200 |
| Free Space Propagation Distance | 0–500 m |
| Forest Propagation Distance | 0–500 m |
| Computation capacity of Sensors | 0.5–1.5 GHz |
| Computation capacity of Edge Servers | 32–48 GHz |
| Energy Penalty Coefficient | 2~12 |
| Delay Penalty Coefficient | 1~8 |
| The expected maximum energy consumption | 5–15 J |
| The expected maximum delay | 1–10 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, X.; Lu, X.; Deng, Y.; Lu, Q.; Kang, Y.; Tang, J.; Shi, Y.; Zhao, J. Offloading Strategy for Forest Monitoring Network Based on Improved Beetle Optimization Algorithm. Symmetry 2024, 16, 1569. https://doi.org/10.3390/sym16121569
Cheng X, Lu X, Deng Y, Lu Q, Kang Y, Tang J, Shi Y, Zhao J. Offloading Strategy for Forest Monitoring Network Based on Improved Beetle Optimization Algorithm. Symmetry. 2024; 16(12):1569. https://doi.org/10.3390/sym16121569
Chicago/Turabian StyleCheng, Xiaohui, Xiangang Lu, Yun Deng, Qiu Lu, Yanping Kang, Jian Tang, Yuanyuan Shi, and Junyu Zhao. 2024. "Offloading Strategy for Forest Monitoring Network Based on Improved Beetle Optimization Algorithm" Symmetry 16, no. 12: 1569. https://doi.org/10.3390/sym16121569
APA StyleCheng, X., Lu, X., Deng, Y., Lu, Q., Kang, Y., Tang, J., Shi, Y., & Zhao, J. (2024). Offloading Strategy for Forest Monitoring Network Based on Improved Beetle Optimization Algorithm. Symmetry, 16(12), 1569. https://doi.org/10.3390/sym16121569