4.1. Basic HHO Algorithm
The basic HHO algorithm consists of two phases, which are a global exploration phase and a local development phase. As for the HHO algorithm, the Harris hawk is the candidate solution, and the best candidate solution in each step is considered as the target prey or near-optimal solution.
Harris hawks randomly perch at specific locations in the global exploration phase and wait for prey discovery according to strategies. During the operation for the HHO algorithm, the prey is a rabbit. The calculation equation is as follows:
where
Xrand is a randomly selected hawk from the current population,
Xrabbit is the location of the rabbit,
Xm is the average location of the current population,
r1,
r2,
r3,
r4 and
q are random numbers in the interval (0,1),
LB and
UB are the upper and lower bounds of the population and
N is the total number of the population.
The HHO algorithm switches the global exploration and local exploitation phases according to the magnitude of the energy
E of prey escape, with the calculation equation as follows:
where
t is the current number of iterations, T is the maximum number of iterations and
E0 is the random number on the interval (−1,1).
In the local development phase, the HHO algorithm is updated using four strategies, of which the decision to adopt is made by the parameter E and a random number from 0 to 1. Since this paper does not cover the improvements in the local development phase, this phase will not be presented in further detail.
4.2. Proposed Improvements of the HHO Algorithm
The CPP solved in this paper is an NP-Hard problem, which cannot be solved in polynomial time with an exact optimal solution but can be solved by approximating the optimum. The CPP solution designed based on the swarm intelligence algorithm usually models the coordinates of the controllers to be placed in SDN as multidimensional physical objects in the swarm intelligence algorithm, sets the objective function and uses the location update strategy to solve the CPP iteratively. Therefore, it is crucial to select a good swarm intelligence algorithm for the CPP solutions.
Similar to other swarm intelligence optimization algorithms, the HHO algorithm suffers from slow convergence speed, low convergence accuracy and falling into local optimum prematurely when solving complex optimization problems [
35]. To obtain a better approximate optimal solution, this paper refers to the hypercube mechanism used in MOPSOs proposed by Coello et al. [
36], so that each individual can choose a different guide and the individual uses the idea of a global repository to identify a guide [
37]. The following four improvements are made according to the deficiencies of the HHO algorithm, aiming to propose a multi-objective version of the improved HHO algorithm (Multi-Objective Improved HHO, MOIHHO, in short).
Improvement 1. In the initialization method,
r1,
r2,
r3,
r4 and
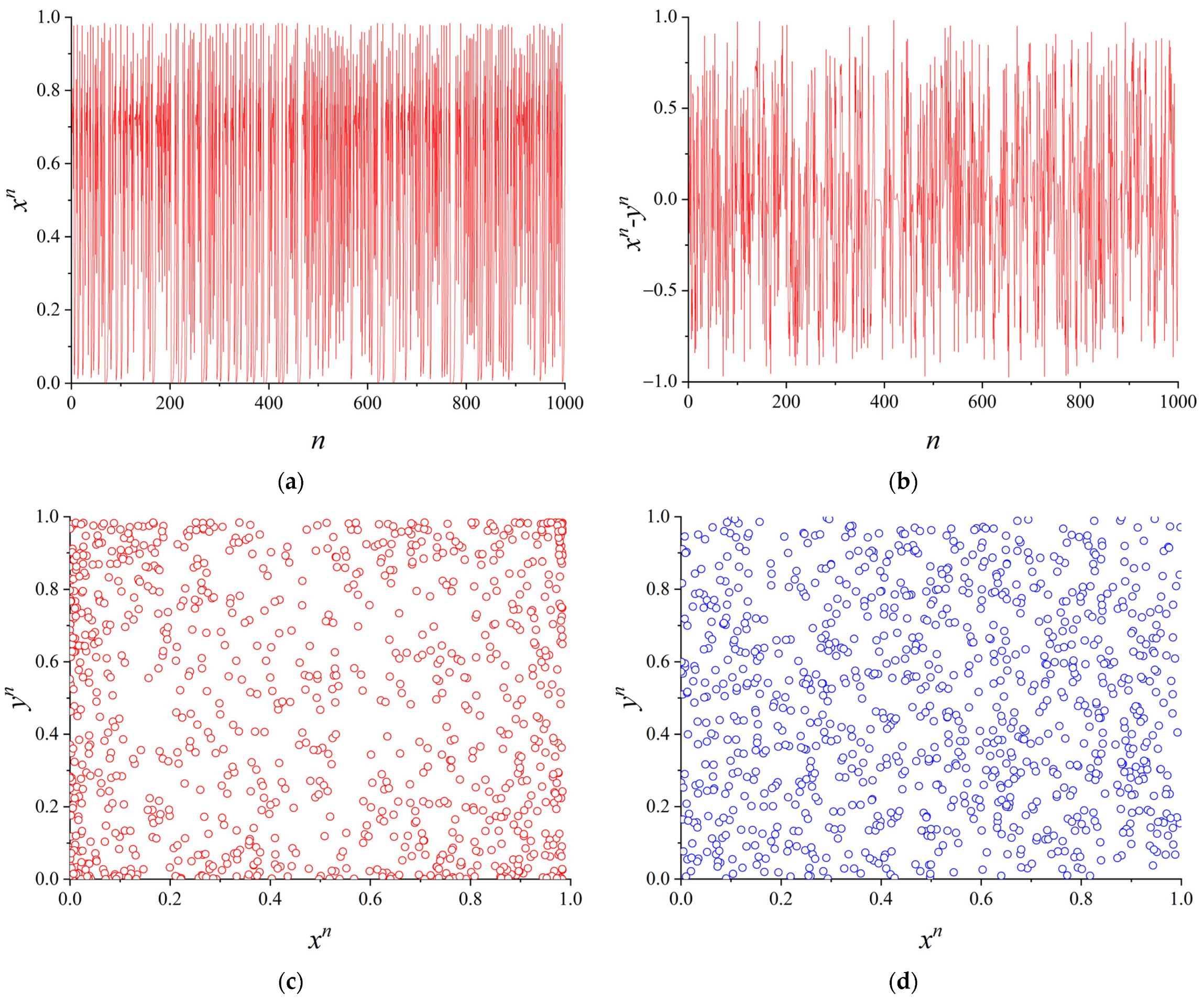
q parameters of the standard HHO algorithm are all random methods, which will lead to the loss of representativeness of the CPP solution and poor network topology applicability. In order to reduce the shortage of small population diversity and slow the rate of convergence caused by the use of random initialization population, a Sin Chaos model with infinite fold times is introduced. Sin Chaos has the advantages of a fast rate of convergence, strong global search ability, and wide adaptability to engineering problems. The use of chaotic sequences for population initialization operation will affect the entire process of the algorithm, making the population more evenly distributed in the search space, enriching the diversity of initial solutions for global optimization, and thus improving the applicability of the solutions obtained from solving CPP. The Sin chaotic one-dimensional mapping equation is as follows:
Figure 2a–c show the randomness, initial value sensitivity and ergodicity of the one-dimensional self-mapping after 1000 runs, and
Figure 2d shows the population distribution using random initialization when
α = 2.9512,
xn = 0.7555,
yn = 0.6555. It is indicated in
Figure 2 that the improved population initialization generates more solution cases to be more conducive to global exploration.
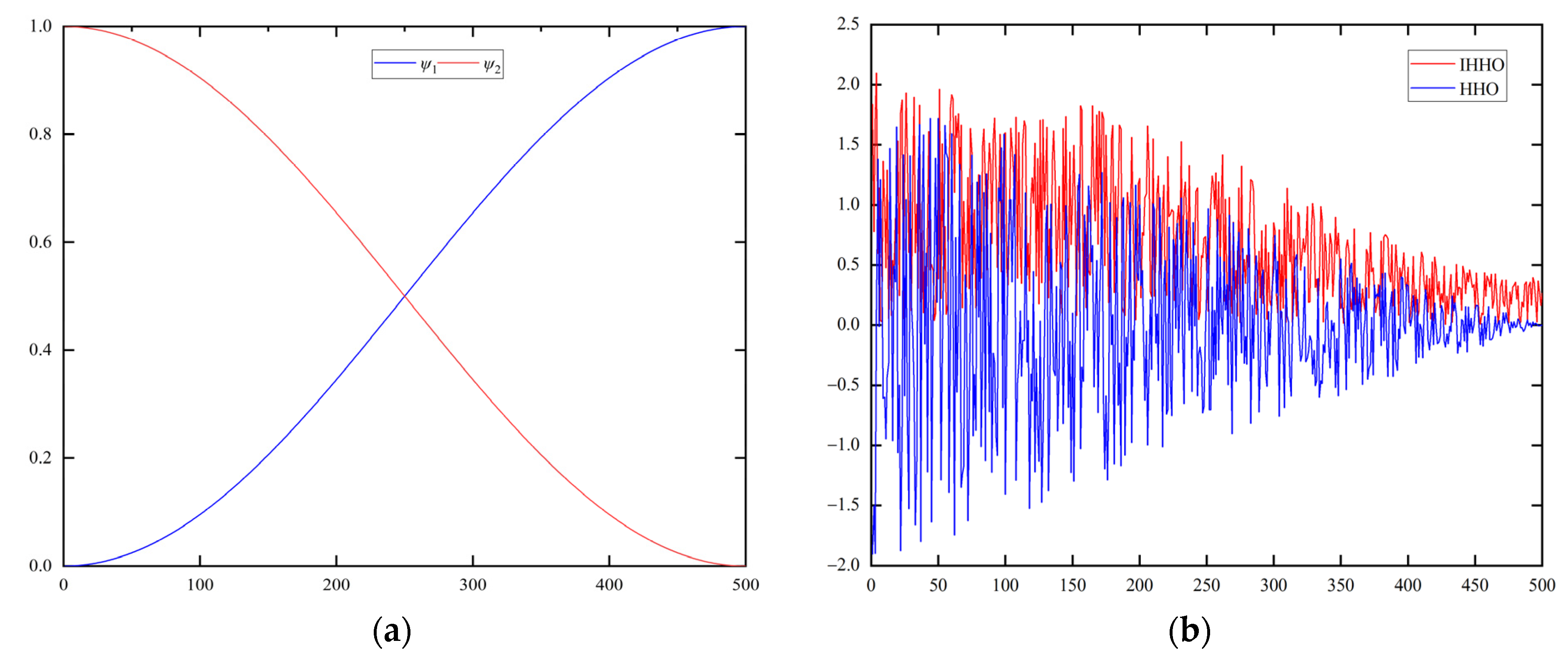
Improvement 2. The standard HHO algorithm only selects the optimal individual during the iteration process and does not communicate with other individuals. However, in order to solve CPP using multi-objective methods, selecting the optimal individual is often not the best choice, which can easily lead to limitations in the placement of the solved controller. The cosine function Cos is an even function that can be incremented or decremented under certain interval constraints and that has symmetry. It is very suitable for specific coefficients in swarm intelligence optimization algorithms for CPP solutions. The original random scaling coefficient
r1 is changed to Cos nonlinearly
increasing to make the hawk swarm move toward the optimal position and achieve a more robust global search performance. As is shown in
Figure 3a, the original scaling factor
r3 is changed to Cos nonlinear
, decreasing to speed up the algorithm’s convergence. To use the hypercube mechanism, replace
Xrabbit(
t), which is the current rabbit’s position, with the part of the guide
Xleader utilizing the guide. The role of the guide
Xleader is selected in such a way that one of the Harris hawks that is greater than the current mean value in the global repository
REP is chosen as the guide. The average position
Xm of the Harris hawk is improved by adding the part of the best global Harris hawk of the previous generation to reduce the risk that the algorithm is prone to fall into local optima. Related calculation equations are as follows:
Improvement 3. The size of prey energy
E plays a vital role in regulating the global exploration and local exploitation. The smaller the
E is, the more the HHO algorithm performs local exploitation, and the more significant the
E is, the more the algorithm tends to perform global exploration. The basic HHO algorithm is too radical in the design of
E, which does not conform to the way prey avoids pursuit in reality. In order to enhance the global search ability of the HHO algorithm, the prey escape energy
E parameter is added to the dynamic adaptive weight
, which is composed of the cos function and the number of iterations
T. The purpose is to make the switching between global exploration and local development smoother. The parameter design is based on experimental experience estimation. The iteration diagram of
E is shown in
Figure 3b. The
and
E can be calculated as follows:
Improvement 4. The switching between global search and local development in the basic HHO algorithm results in a reduced time sequence, leading to premature entry into local development and deviation from the target value in the early stage. Any local optimization is ineffective, and the global search is insufficient. As a result, the solved controller placement scheme cannot meet expectations, and the search group can randomly jump to a new area far from its current location. To check if there is a better target solution and achieve the effect of global development and reduce the deficiency of the HHO algorithm in the population diversity at the end of the iteration due to the decreasing time series, the Cauchy variation perturbation is added at the location of the optimal solution [
38]. The peak of the Cauchy function is relatively small, and Harris hawk searches more for the global optimum after the Cauchy variation. Generating new solutions enhances the ability of the algorithm to leap out of the local space to check if a better CPP solution exists. The standard Cauchy distribution function is shown in Equation (35). The mathematical model of the Cauchy variation obtains the current global optimal solution, and
Xbest_rabbit updates the optimal solution with Equation (36).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}