Abstract
The purpose of this paper is to find a common element of the fixed point set of a nonexpansive mapping and the set of solutions of the general split variational inclusion problem in symmetric Hilbert spaces by using the inertial viscosity iterative method. Some strong convergence theorems of the proposed algorithm are demonstrated. As applications, we use our results to study the split feasibility problem and the split minimization problem. Finally, the numerical experiments are presented to illustrate the feasibility and effectiveness of our theoretical findings, and our results extend and improve many recent ones.
Keywords:
inertial viscosity method; split variational inclusion problem; fixed point; strong convergence; Hilbert spaces MSC:
47H10; 49H09; 47J25
1. Introduction
The Hilbert space theory and the nonlinear fixed point problem are an important field in mathematics and optimization. Symmetry is closely related to the fixed point problem. And Hilbert space is one kind of reflexive space, and a reflexive Hilbert space is called a symmetric space. Let be a real symmetric Hilbert space and be a mapping. The set of fixed points of S is denoted by . It is known that S is a contraction if there exists a constant such that .
Let be a set valued mapping. Then, T is said to be monotone if for all with and . A monotone mapping T is maximal monotone if its graph is not properly contained in the graph of any other monotone mapping. The resolvent operator of mapping T defined by for each .
It is worth noting that the split variational inclusion problem serves as a model in image reconstruction, radiation therapy and sensor networks [1,2,3]. There are many other special cases of split variational inclusion problem, such as split feasibility problem, variational inclusion problem, fixed point problem, split equilibrium problem and split minimization problem; see [4,5,6,7,8,9,10] and the references therein. Let and be two real Hilbert spaces, and let and be maximal monotone mappings. In fact, the following is a split variational inclusion problem: to find a point such that
where is a bounded linear operator. Several iterative algorithms for finding the set of solutions of the split variational inclusion problem have been studied by many authors [11,12,13]. Particularly, in 2012, Byrne et al. [14] introduced the following iteration process for given :
where . They established the weak and strong convergence of the algorithm to solve the split variational inclusion problem. In 2014, Kazmi and Rivi [13] proved a strong convergence result of the following algorithm to a solution of the split variational inclusion problem and the fixed point problem of a nonexpansive mapping in Hilbert space:
On the other hand, many authors are increasingly interested in using inertial techniques to build efficient iterative algorithms due to the effect that inertial techniques have to speed up convergence, see [15,16,17,18,19,20,21] and references therein. In 2001, Alvarez and Attouch [22] introduced the following inertial proximal point method to solve the variational inclusion problem:
where , . They proved that the sequence converges weakly to a zero of the maximal monotone operator B. Thenceforward, in 2017, Chuang et al. [23] extended this method to the hybrid inertial proximal algorithm in Hilbert spaces. They proved that their iterative sequence converges weakly to the solution of the split variational inclusion problem. In 2018, Cholamjiak et al. [20] obtained strong convergence results by combining the inertial technique of the Halpern iteration method. Moreover, in 2020, Pham et al. [24] proposed an algorithm which is a combination of Mann method and inertial method for solving the split variational inclusion problem in real Hilbert spaces:
They proved that the sequence converges strongly to a solution of the split variational inclusion problem with two set-valued maximal monotone mappings.
Motivated and inspired by the above work, we consider the following general split variational inclusion problem of finding a point such that
where are two families of maximal monotone mappings. The solution set of the general split variational inclusion problem is denoted by . We present an inertial viscosity iterative algorithm for the general split variational inclusion problem and the fixed point problem of a nonexpansive mapping:
Then, the strong convergence theorem of this algorithm is proved. We apply this iterative scheme to studying the split feasibility problem and the split minimization problem. Finally, we give the numerical experiments to illustrate the feasibility and effectiveness of our main theorem. Our results extend and improve many recent ones [12,13,14,20,23,24].
2. Preliminaries
Let be a nonempty closed convex subset of a real symmetric Hilbert space with inner product of regularity and symmetry and norm . and denote the weak convergence and strong convergence of the sequence to a point x, respectively. A mapping is called the metric projection if . It is known that is nonexpansive and
The following lemmas and concepts will be needed to prove our main results.
Definition 1.
Suppose is a mapping. Then, S is called nonexpansive if
S is said to be firmly nonexpansive if
Lemma 1
([11]). Suppose is a real Hilbert space. Then, for all , the following statements are hold:
- (i)
- ;
- (ii)
- .
Lemma 2
([17]). Assume is a sequence of nonnegative real numbers satisfying:
where and such that:
- (i)
- and
- (ii)
- either or
Then .
Lemma 3
([25]). Suppose is a nonexpansive mapping, and is a sequence in . If and , then .
Lemma 4
([26]). Suppose that is a sequence of nonnegative real numbers satisfying for all , where is a subsequence of . Then, there exists a nondecreasing sequence such that and , we have
In fact, .
Lemma 5
([27]). Let be a set-valued maximal monotone mapping and , the following relations hold:
- (i)
- For each , the resolvent mapping is is a single-valued and firmly nonexpansive mapping;
- (ii)
- ;
- (iii)
- is a firmly nonexpansive mapping;
- (iv)
- Suppose that , then for all , and ;
- (v)
- Suppose that , then for all , and .
Lemma 6.
Assume that and are two real Hilbert spaces. Let be a linear and bounded operator with its adjoint . Let are two families of maximal monotone mappings. Let and be the resolvent mapping of and , respectively. Suppose that the solution set of the the solution set Γ is nonempty and . Then, for any , z is a solution of general split variational inclusion problem if and only if .
Proof.
⇒ Let , then and . From Lemma 5(ii), we have that
⇐ Let and . From Lemma 5(v), for any , we get
which implies that , then . For any , we also use Lemma 5(v) to obtain
Thus, we observe that
which means for any and , we have
Since , then and , we get , then , so . It follows that
which implies , so . Therefore . □
3. Main Results
Theorem 1.
Let and be two real Hilbert spaces. Let be a bounded linear operator and be the adjoint operator of A. Suppose that are two families of maximal monotone mappings. Let be a contraction with coefficient and be a nonexpansive mapping such that . Suppose . Assume that are sequences of positive real numbers and . If the sequence defined by (1) satisfies the following conditions:
- (i)
- Let the parameter chosen aswhere , is a positive real sequence such that ;
- (ii)
- , , ;
- (iii)
- , , ,
then converges strongly to an element , where .
Proof.
Let , then we have , and . By the convexity of , we obtain
It follows from Lemma 5 that are nonexpansive. Then, we get
which means
From condition (i), we have
is a constant. Define , then we have
We compute that:
which implies that is bounded; hence, , , and is also bounded.
Since is bounded and , there exists a constant , we have
Therefore, using (3), we observe that
Furthermore,
which indicates that
Moreover, for some ,
Next, we consider the convergence of the sequence in two cases.
Case 1: There exists a such that for each . This indicates that is convergent. Thus, from (11), (13) and (14), we have
Then, by the restriction conditions, we can get
From (12), we have
Then, we obtain
From the definition of , we obtain
From (ii) and (18), we have
Suppose that is a subsequence of such that . From (17) and (18), there exist subsequences of and satisfying and , respectively. Since A is a bounded linear operator, then . Moreover, we know that , which implies that , by Lemma 6, we get . From and Lemma 3, we deduce . Hence . Then, it follows that
Apply Lemma 2 to (10), we have .
Case 2: Suppose that the sequence is not monotonically decreasing. Then, there exists a subsequence such that
By Lemma 4, there exists a nondecreasing sequence such that :
Similar to the proof in Case 1, we have
and
which implies
then using , we get
By (20), we obtain . It follows from for all that , by using Lemma 4, we deduce . Therefore, the sequence . This completes the proof. □
In Theorem 1, we put ; then, we have the following result.
Corollary 1.
Let and be two real Hilbert spaces. Let be a bounded linear operator and be the adjoint operator of A. Suppose that , are two families of maximal monotone mappings. Let be fixed and be a nonexpansive mapping such that . For , the sequence defined by:
where , are sequences of positive real numbers satisfying the following conditions:
- (i)
- Let the parameter chosen aswhere , is a positive real sequence such that ;
- (ii)
- , , ;
- (iii)
- , , .
Then converges strongly to an element , where .
In Theorem 1, we set . Then, we obtain the following result.
Corollary 2.
Let and be two real Hilbert spaces. Let be a bounded linear operator and be the adjoint operator of A. Suppose that are two maximal monotone mappings. Let be a contraction with coefficient and be a nonexpansive mapping such that . For , the sequence defined by:
where , are sequences of positive real numbers satisfying the following conditions:
- (i)
- Let the parameter chosen aswhere , is a positive real sequence such that ;
- (ii)
- , , ;
- (iii)
- .
Then, converges strongly to an element , where .
Let and be two nonempty closed convex subsets. Now, we recall that the following split feasibility problem is to find
The solution set of the split feasibility problem is denoted by . In Corollary 2, if and , we obtain the following result.
Corollary 3.
Let and be nonempty closed convex subsets of Hilbert spaces and , respectively. Let be a bounded linear operator and be the adjoint operator of A. Let be a contraction with coefficient and be a nonexpansive mapping such that . For , the sequence defined by:
where , are sequences of positive real numbers satisfying the following conditions:
- (i)
- Let the parameter chosen aswhere , is a positive real sequence such that ;
- (ii)
- , , ;
- (iii)
- .
Then, converges strongly to an element , where .
Let and be proper lower semicontinuous convex functions. The split minimization problem is to find
The solution set of the split minimization problem is denoted by . It is well known that the subdifferential is maximal monotone and is firmly nonexpansive. In Corollary 2, if and , we obtain the following result.
Corollary 4.
Let and be Hilbert spaces and , be proper lower semicontinuous convex functions. Let be a bounded linear operator and be the adjoint operator of A. Let be a contraction with coefficient and be a nonexpansive mapping such that . For , the sequence defined by:
where , are sequences of positive real numbers satisfying the following conditions:
- (i)
- Let the parameter chosen aswhere , is a positive real sequence such that ;
- (ii)
- , , ;
- (iii)
- .
Then, converges strongly to an element , where .
4. Numerical Examples
In this section, we give some numerical experiments to illustrate the feasibility and effectiveness of our proposed algorithm and the main result. All the codes are written in Python 3.7.
Example 1.

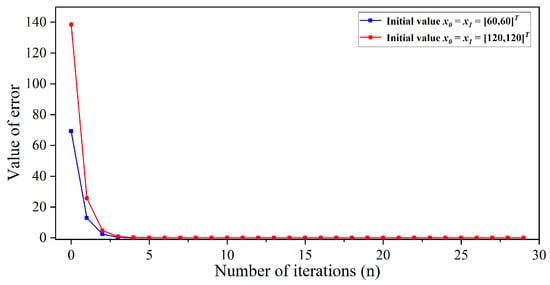
Let , and . Let be defined by , , and . We put , then we can get the resolvent mappings associated with and . Let , , , and for all . We take
Let S and f be defined by , . This implies that . Starting the initial values and in (1), respectively. The numerical results have been shown in Table 1 and Figure 1. We test the convergence behavior of this algorithm under different stopping conditions. The results are shown in Table 2.
Table 1.
The values of error .
Figure 1.
Numerical results for Example 1.
Table 2.
The number of termination iterations and execution time with different stopping conditions.
Remark 1.
The parameters we select satisfy the conditions (i)–(iii) in Theorem 1. We randomly selected initial values to study the convergence of the algorithm. The numerical results we obtained verify the effectiveness and feasibility of our proposed iterative algorithm. In addition, we can observe the convergence rate of the iterative algorithm. The most important thing is that the method we provide converges very quickly in terms of the number of iterations and execution time, and these results are not significantly related to the choice of initial values.
5. Conclusions
In this paper, we have presented and analyzed an inertial viscosity iterative algorithm for general split variational inclusion problems and fixed point problems in Hilbert spaces. The strong convergence of the proposed algorithms is demonstrated, and the numerical experiments are given to illustrate the efficiency of Theorem 1. We give an extension of the inertial viscosity approximation and the common fixed point problems in Hilbert spaces, and we generalize the split variational inclusion problems to the general split variational inclusion problems of Cholamjiak et al. [20] and Chuang [23]. In Corollary 2, if , it is the main result of Pham et al. [24]. In addition, the methods and results also extend and improve some corresponding recent results of [12,13,14,22] as special cases.
Author Contributions
Conceptualization, C.P.; methodology, C.P.; software, C.P. and K.W.; validation, C.P.; formal analysis, C.P.; investigation, C.P. and K.W.; resources, C.P. and K.W.; data curation, C.P. and K.W.; writing—original draft preparation, C.P.; writing—review and editing, C.P.; visualization, C.P. and K.W.; supervision, C.P.; project administration, C.P. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by Research funding (Grant no. 88106003214).
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Byrne, C. Iterative oblique projection onto convex sets and the split feasibility problem. Inverse Probl. 2002, 18, 441–453. [Google Scholar] [CrossRef]
- Rockafellar, R.T. Monotone operator and the proximal point algorithm. SIAM J. Control Optim. 2011, 14, 877–898. [Google Scholar] [CrossRef]
- Combettes, P.L. The convex feasibility problem in image recovery. Adv. Imaging Electron Phys. 1996, 95, 155–270. [Google Scholar]
- Reich, S.; Tuyen, T.M. The split feasibility problem with multiple output sets in Hilbert spaces. Optim. Lett. 2020, 14, 2335–2353. [Google Scholar] [CrossRef]
- Ghasemzadehdibagi, S.; Asadi, M.; Haghayeghi, S.; Khojasteh, F. A new three-step iteration method for α-nonexpansive mappings and variational inequalities. J. Math. Anal. 2018, 9, 38–46. [Google Scholar]
- Qin, X.; Yao, J.C. A viscosity iterative method for a split feasibility problem. J. Nonlinear Convex Anal. 2019, 20, 1497–1506. [Google Scholar]
- Censor, Y.; Gibali, A.; Reich, S. Algorithms for the split variational inequality problem. Numer. Algorithms 2012, 59, 301–323. [Google Scholar] [CrossRef]
- Abbas, M.; Ibrahim, Y.; Khan, A.R.; Sen, D.L. Strong convergence of a system of generalized mixed equilibrium problem, split variational inclusion problem and fixed point problem in Banach spaces. Symmetry 2019, 11, 722. [Google Scholar] [CrossRef]
- Payvand, M.A.; Jahedi, S. System of generalized mixed equilibrium problems, variational inequality, and fixed point problems. Fixed Point Theory Appl. 2016, 2016, 93. [Google Scholar] [CrossRef][Green Version]
- Asadi, M.; Karapnar, E. Coincidence point theorem on hilbert spaces via weak ekeland variational principle and application to boundary value problem. Thai J. Math. 2021, 19, 1–7. [Google Scholar]
- Shehu, Y.; Ogbuisi, F.U. An iterative method for solving split monotone variational inclusion and fixed point problems. Rev. R. Acad. Cienc. Exactas Fís. Nat. Ser. A Mat. 2016, 110, 503–518. [Google Scholar] [CrossRef]
- Chuang, C.S. Strong convergence theorems for the split variational inclusion problem in Hilbert spaces. Fixed Point Theory Appl. 2013, 2013, 350. [Google Scholar] [CrossRef][Green Version]
- Kazmi, K.R.; Rizvi, S.H. An iterative method for split variational inclusion problem and fixed point problem for a nonexpansive mapping. Optim. Lett. 2014, 8, 1113–1124. [Google Scholar] [CrossRef]
- Byrne, C.; Censor, Y.; Gibali, A.; Reich, S. Weak and strong convergence of algorithms for the split common null point problem. J. Nonlinear Convex Anal. 2012, 13, 759–775. [Google Scholar]
- Hammad, H.A.; Rehman, H.U.; Sen, M.D.L. Shrinking projection methods for accelerating relaxed inertial tseng-type algorithm with applications. Math. Probl. Eng. 2020, 2020, 7487383. [Google Scholar] [CrossRef]
- Chuasuk, P.; Ogbuisi, F.; Shehu, Y.; Cholamjiak, P. New inertial method for generalized split variational inclusion problems. J. Ind. Manag. Optim. 2020, 17, 3357–3371. [Google Scholar] [CrossRef]
- Tan, B.; Qin, X.; Yao, J.C. Strong convergence of self-adaptive inertial algorithms for solving split variational inclusion problems with applications. J. Sci. Comput. 2021, 87, 20. [Google Scholar] [CrossRef]
- Shehu, Y.; Gibali, A. New inertial relaxed method for solving split feasibilities. Optim. Lett. 2020, 15, 2109–2126. [Google Scholar] [CrossRef]
- Hammad, H.A.; Tuyen, T.M. Effect of shrinking projection and cq-methods on two inertial forward–backward algorithms for solving variational inclusion problems. Rend. Circ. Mat. Palermo 2021, 70, 1669–1683. [Google Scholar]
- Cholamjiak, W.; Cholamjiak, P.; Suantai, S. An inertial forward-backward splitting method for solving inclusion problems in Hilbert spaces. J. Fixed Point Theory Appl. 2018, 20, 42. [Google Scholar] [CrossRef]
- Suantai, S.; Pholasa, N.; Cholamjiak, P. The modified inertial relaxed cq algorithm for solving the split feasibility problems. J. Ind. Manag. Optim. 2018, 14, 1595–1615. [Google Scholar] [CrossRef]
- Alvarez, F.; Attouch, H. An inertial proximal method for maximal monotone operators via discretization of a nonlinear oscillator with damping. Set Valued Anal. 2001, 9, 3–11. [Google Scholar] [CrossRef]
- Chuang, C.S. Hybrid inertial proximal algorithm for the split variational inclusion problem in Hilbert spaces with applications. Optimization 2017, 66, 777–792. [Google Scholar] [CrossRef]
- Anh, P.K.; Thong, D.V.; Dung, V.T. A strongly convergent mann-type inertial algorithm for solving split variational inclusion problems. Optim. Eng. 2021, 22, 159–185. [Google Scholar] [CrossRef]
- Xu, H.K. Strong convergence of an iterative method for nonexpansive and accretive operators. J. Math. Anal. Appl. 2006, 314, 631–643. [Google Scholar] [CrossRef]
- Maingé, P.E. Strong convergence of projected subgradient methods for nonsmooth and nonstrictly convex minimization. Set-Valued Anal. 2008, 16, 899–912. [Google Scholar] [CrossRef]
- Marino, G.; Xu, H.K. Convergence of generalized proximal point algorithm. Commun. Pure Appl. Anal. 2004, 3, 791–808. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).