1. Introduction
With increases in the service life of bridges, more and more bridges have been damaged to varying degrees. In order to ensure the safety of the structure and the operation of the bridge, it is very important to monitor or detect the health of the bridge. The early detection of damage to a bridge and emergency repair can effectively improve the service life of the bridge [
1,
2,
3,
4,
5]. In order to obtain the modal characteristics of a bridge, the direct measurement method is widely used, but this method needs sensors installed on the bridge, which not only interrupts traffic but is also time-consuming and laborious.
Yang et al. [
6] first proposed the “indirect measurement method” based on a vehicle’s response to identify the dynamic characteristics of bridges in 2004. Subsequently, Lin et al. [
7] verified the effectiveness of the method through field tests in 2005, and scholars from various places have successively carried out related studies. The basic idea is that after the vehicle passes the bridge, at each point of the bridge, the vertical vibration of the vehicle causes the vertical vibration of the bridge. Due to the coupling between the vehicle and the bridge, the vertical vibration of the bridge reacts to the vehicle and acts as the main vehicle. The vertical excitation source, through the relevant signal processing of the vertical vibration acceleration of the vehicle, further obtains the relevant dynamic characteristic information of the bridge. Since the method was proposed, it has received extensive attention from many scholars at home and abroad, and a series of innovative research results has been achieved and is expected to provide new ideas for the rapid testing and safety diagnosis of the health status of small- and medium-span bridges [
8,
9,
10].
Since the “indirect measurement method” came out more than 10 years ago, scholars from all over the world have applied it to the field of bridge modal parameter identification and bridge health monitoring. The corresponding research has mainly gone through the following stages: the indirect measurement method is proposed; identification of bridge frequency; identification of bridge mode; identification of bridge damping; identification of bridge damage. The modal shape of a bridge, which has been extensively investigated by scholars, is an essential parameter that reflects the structural characteristics of the bridge. Using the indirect measurement method to identify the analytical solution formula of bridge frequency through band-pass filtering, Hilbert–Huang transform, and other signal processing techniques, Yang et al. [
11,
12] identified the mode shape of a simply supported girder bridge from the vertical acceleration time history response of vehicles, derived an analytical solution to identify the mode shape of the bridge, and roughly discussed the influence of bridge deck unevenness, traffic flow, and vehicle speed on the first-order vibration shape of the bridge. Yang et al. [
13] used the vertical acceleration signals collected by two stationary vehicles on a bridge to calculate the vertical displacement of the contact point between the vehicle and the bridge, then changed the position of the vehicle, collected signals repeatedly, and constructed a matrix combined with the SVD method to extract the mode shape of the bridge. Qi et al. [
14] proposed a method of impacting the vehicle body to identify the mode shape of a three-span continuous girder bridge by increasing the excitation of the bridge and overcoming the interference of white noise and bridge deck unevenness on mode shape identification and identified the first three modes of the continuous girder bridge. In addition, the short-time frequency decomposition technology proposed by scholars has improved the accuracy of the modal shape identification of bridges [
15,
16]. In addition, the combination of band-pass filtering and hanning window technology has solved the limitation of the low-speed driving of vehicles [
17], and the tractor trailer system combines the short-time Fourier transform (STFT) method to eliminate the interference caused by vehicle frequency and road roughness [
18,
19,
20,
21]. Yang et al. [
9] summarized the indirect measurement method, clarifying the convenience of the indirect measurement method in practical engineering applications and the insufficiency of research, especially in the limitations of vehicle models.
Bridge damage location is the ultimate goal of the research. Based on the vehicle–bridge interaction, the researchers used the reconstructed first-order bridge mode shape, combined with the curvature mode method [
22] and the improved direct stiffness method [
23,
24,
25], to determine the damage location of the bridge. In addition, using the signals collected by the measuring vehicle, combined with the element stiffness index (ESI) [
26], empirical mode decomposition (EMD) [
27], genetic algorithm (GA) [
28], wavelet transform [
29], bridge displacement profile difference [
30,
31], global filtering method (GFM) [
32], instantaneous curvature (IC) [
33], vehicle transmissibility [
18], wavelength characteristics [
34], approximate Metropolis–Hastings (AMH) algorithm and the probability density evolution method [
35], instantaneous amplitude square (IAS) [
36,
37,
38], and other indicators and techniques have achieved fruitful results in the field of bridge damage identification.
Bridge damage identification based on vehicle response does not require on-site installation of detection instruments and has the advantages of high efficiency, convenient operation, and cost savings. In view of the superiority of the IAS method in [
38], this paper further expands the application scope of the IAS method in different structural forms of girder bridges; this paper takes the simply supported beam bridge, continuous beam bridge, and skew beam bridge as the research objects and accurately locates the damage location of the beam bridge through numerical simulation. The parameters, such as vehicle speed, social vehicle, damage degree, vehicle damping, and bridge damping, are analyzed in detail, which provides a reference for the application of the IAS method in practical engineering.
2. Indirect Measurement Theory
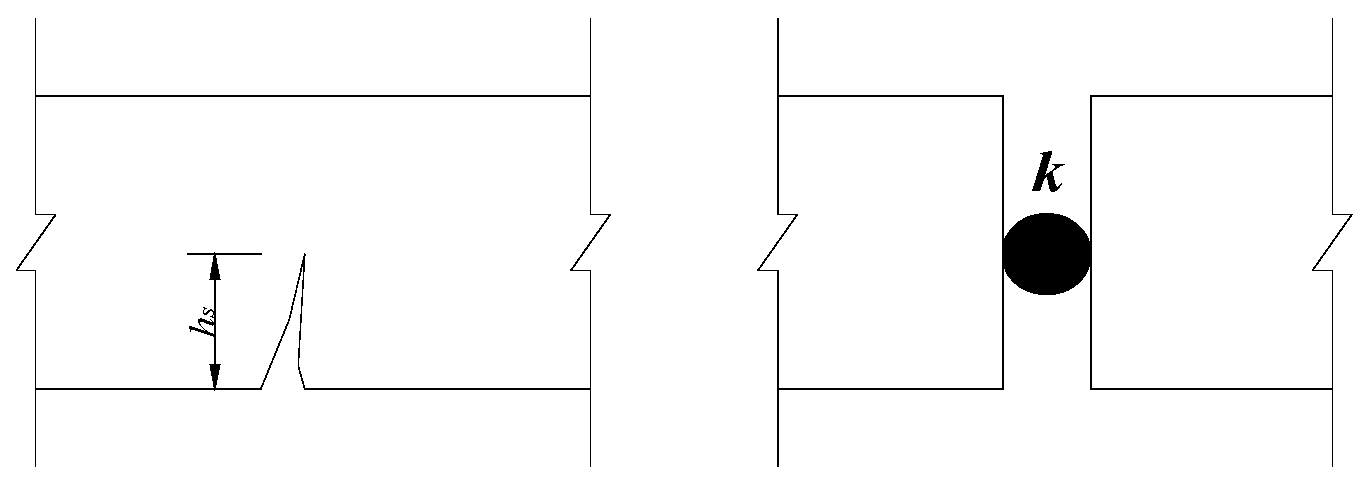
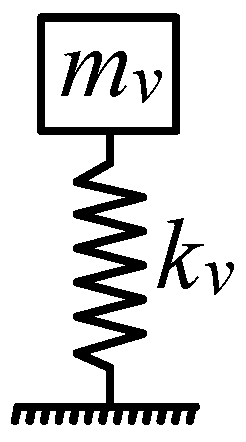
As shown in
Figure 1, a single-degree-of-freedom vehicle is used to pass a simply supported beam bridge, and the theoretical solution of the vehicle is derived based on this model. It is worth noting that this theory is also applicable to other beam bridge forms.
The single-axle 1/4 vehicle is modeled into a sprung mass with a mass of
, and the spring stiffness is
. The mass per unit length of the bridge is taken as
, the bending stiffness of the section is
EI, and the deflection at the coordinate
x of the bridge is
; the derivation process of the formula is referred to in [
37].
Discretize the bridge, and the equation of motion of the bridge is listed as follows:
The equation of motion of the vehicle is listed as follows:
Omitting the intermediate process of formula derivation, the acceleration response of the vehicle is:
where
where
is the nth-order natural frequency of the bridge;
is the vertical vibration frequency of the vehicle;
is the static displacement of the nth-order mode of the bridge under the action of the vehicle, and
is the dimensionless velocity parameter;
L is the total length of the bridge;
v is the moving speed of the vehicle;
is the mass of the moving vehicle;
EI is the bending stiffness of the bridge.
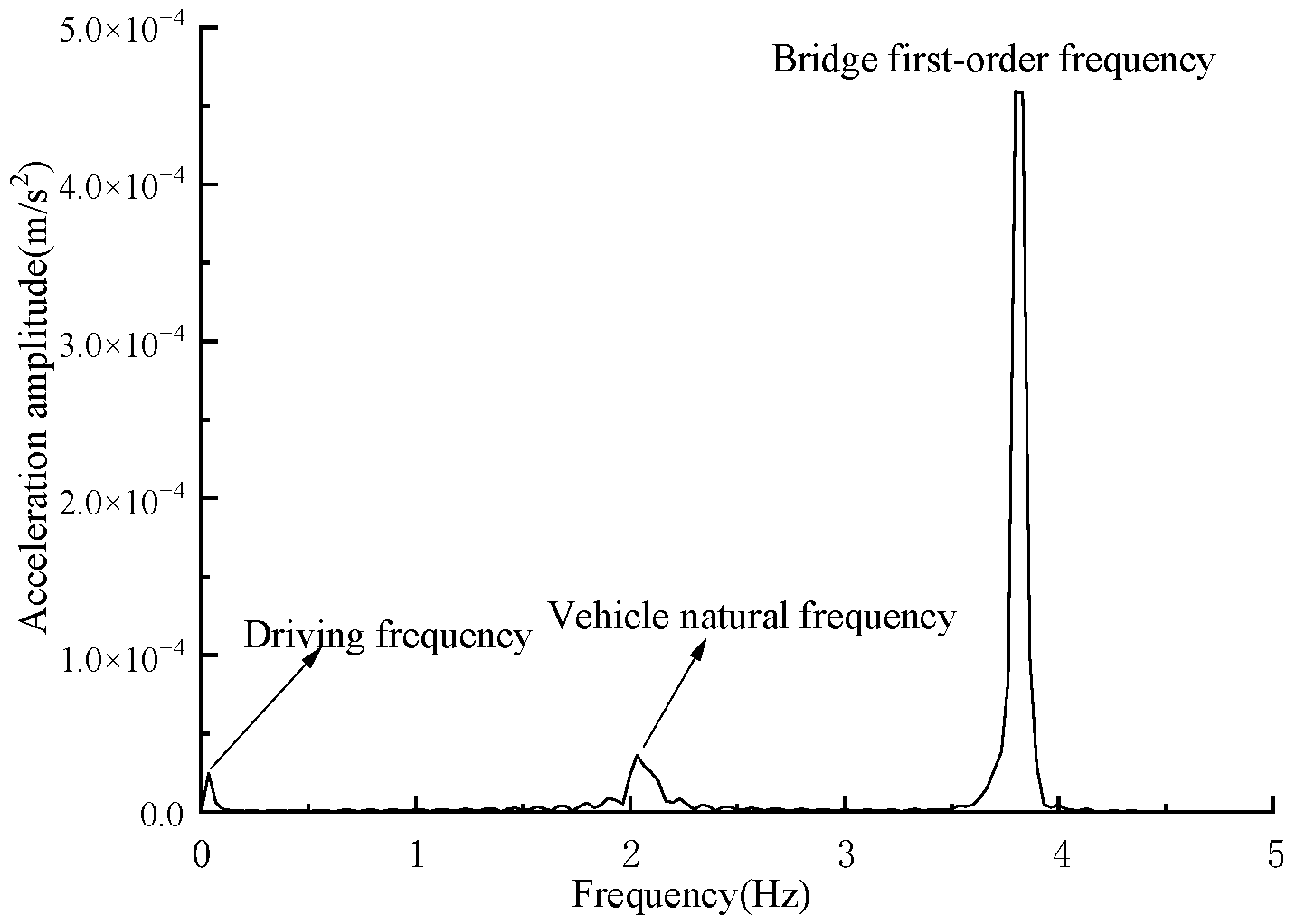
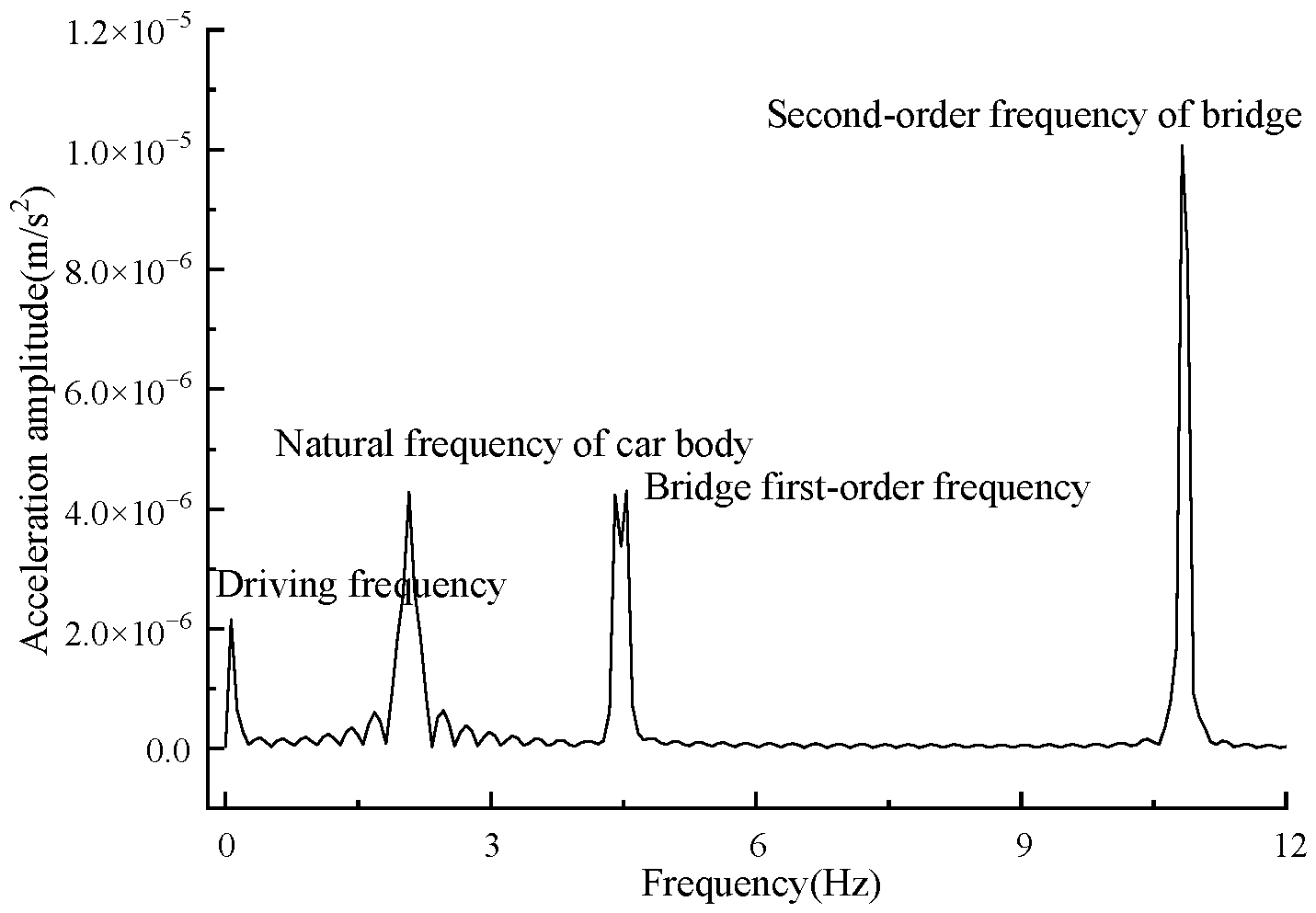
The analytical solution of the vehicle acceleration time history response is composed of three different types of frequency superposition, which are the natural frequency of the vehicle , the driving frequency , the left-shift frequency , and the right-shift frequency of the bridge .
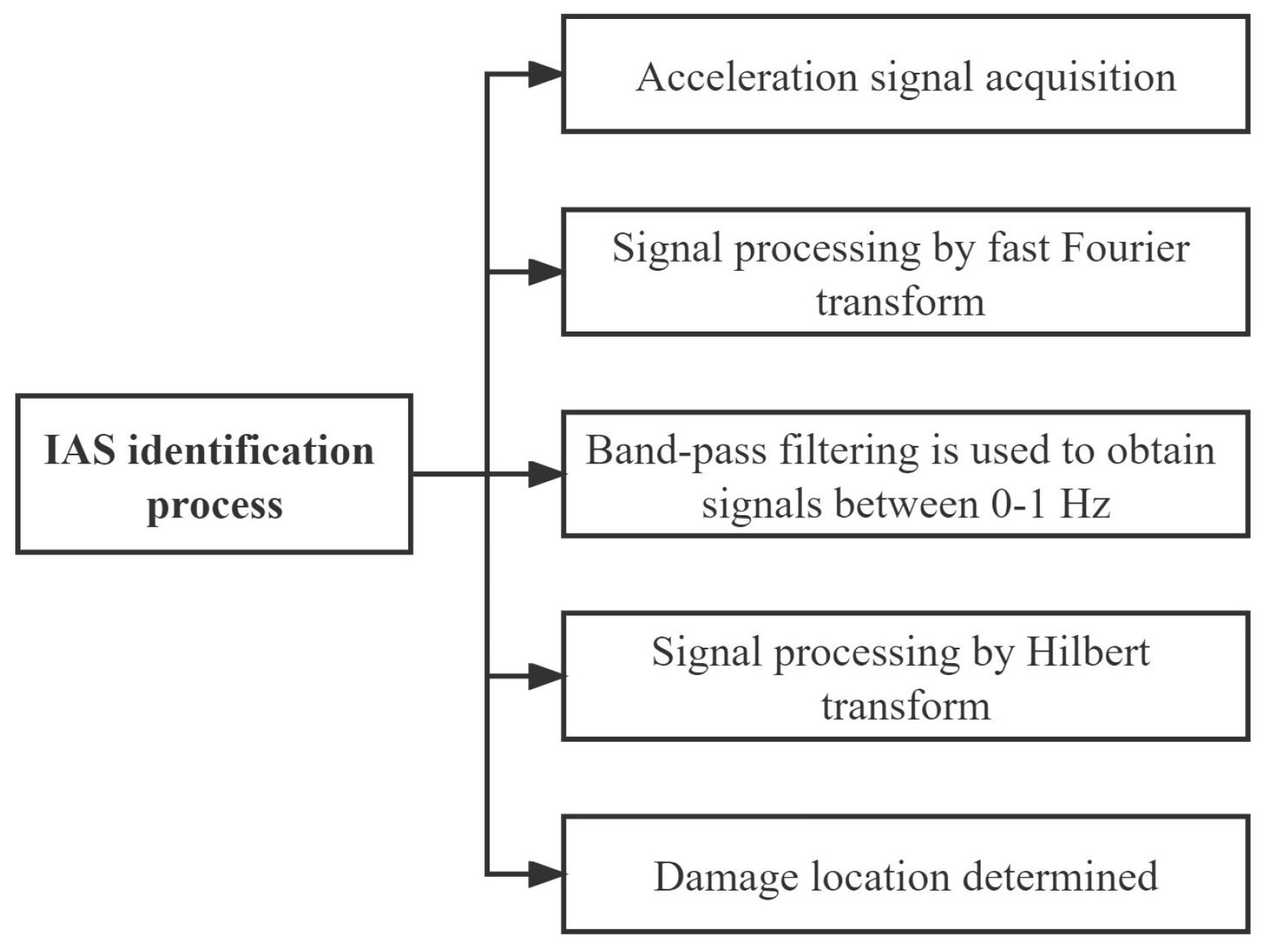
The IAS method is a new bridge damage location identification method based on Hilbert transform. The IAS value is defined as follows:
Rd(x) is the driving component response of vehicle acceleration, where , is a modal function; when the bridge is damaged, the modal function has a sudden change.
4. Effect of Vehicle Speed on IAS Value
The damage identification of the three-span continuous beam bridge in
Section 3.2.2 is based on the IAS method. In different numerical tests, the vehicle adopts a 1/4 single-degree-of-freedom vehicle model and analyzes the case of continuous beam driving at a constant speed at five different speeds. According to the basic principle of an indirect measurement method, vehicle speed has the same law of action on different beam bridge forms, so this section only selects a continuous beam bridge for vehicle speed discussion.
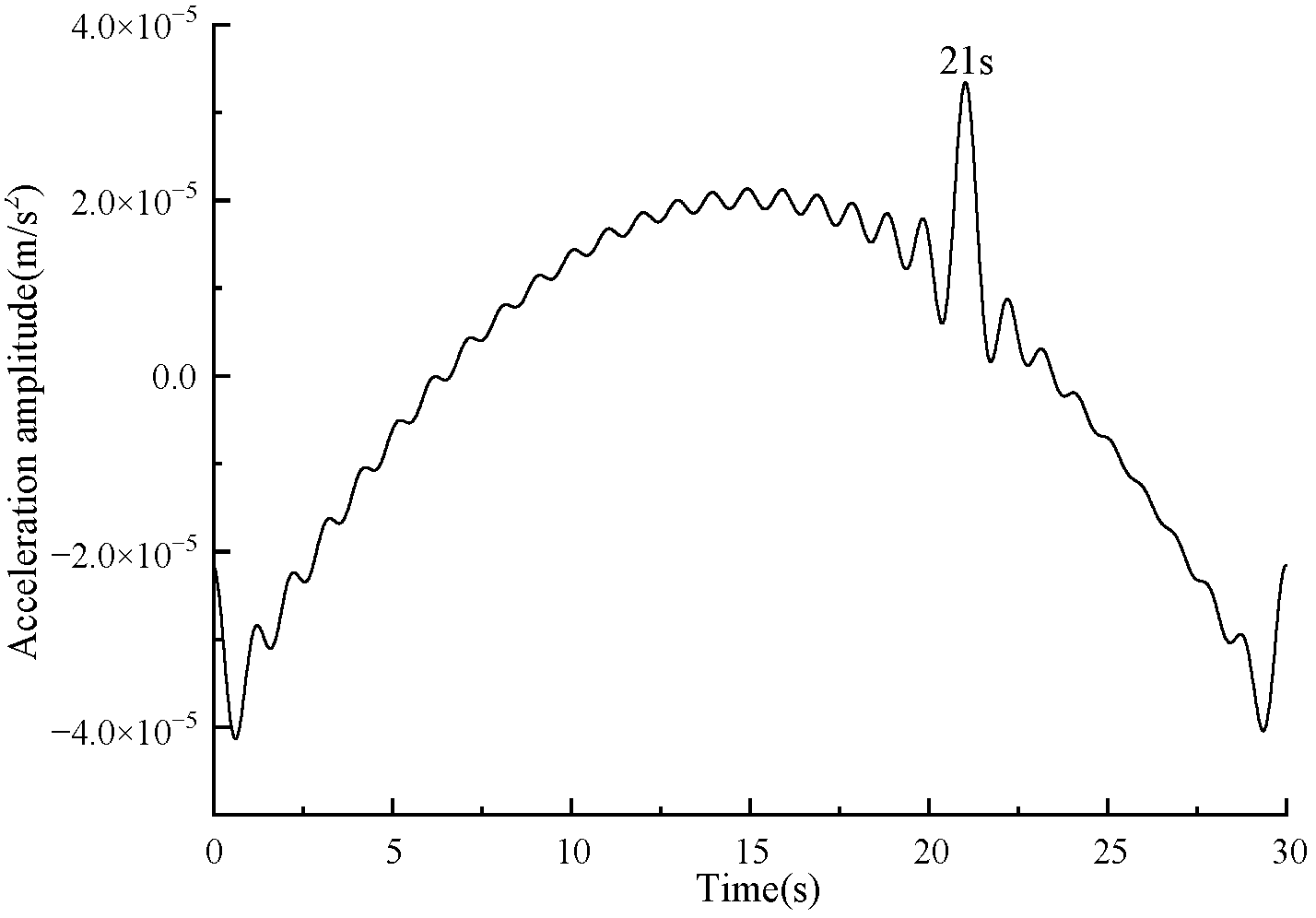
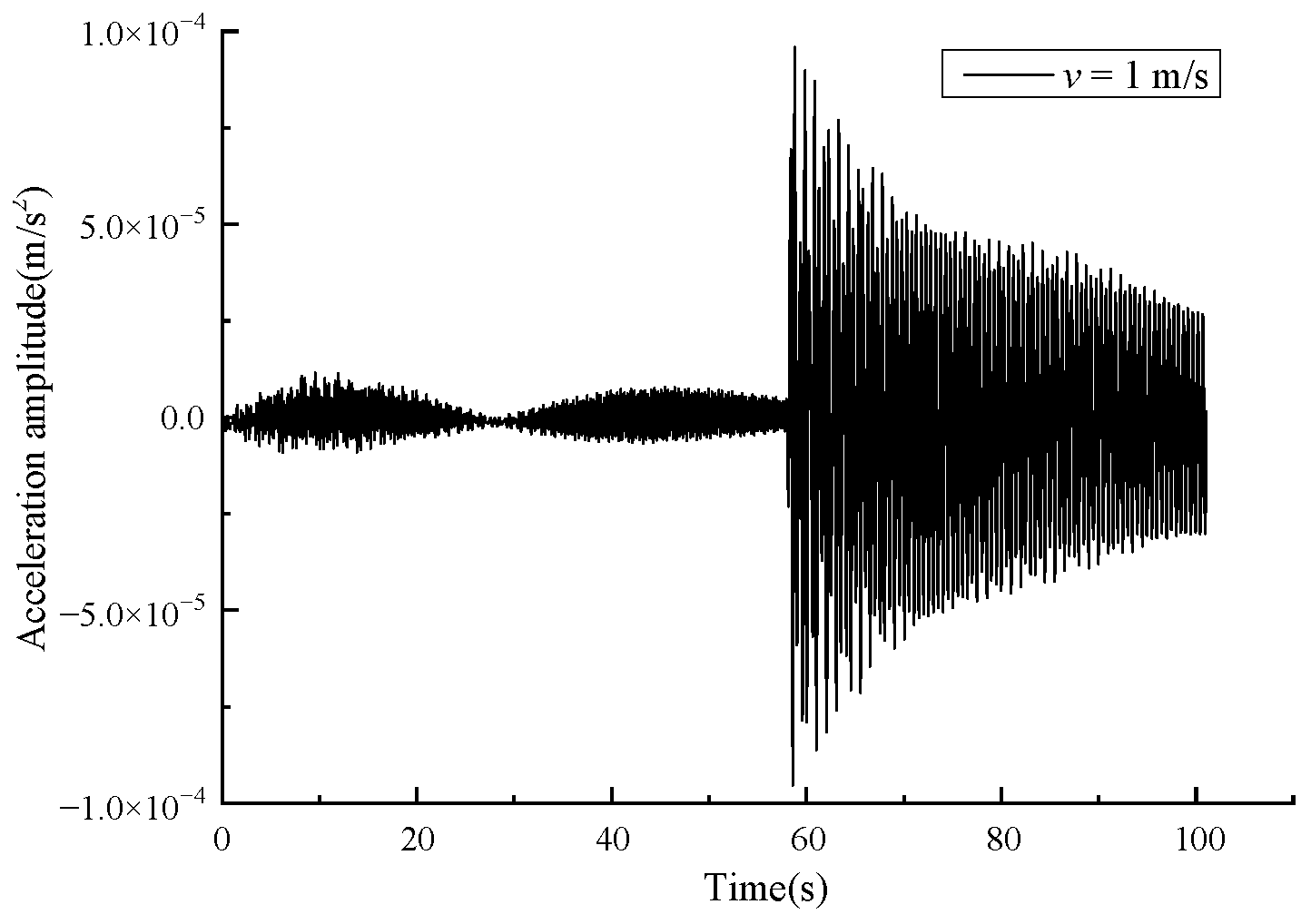
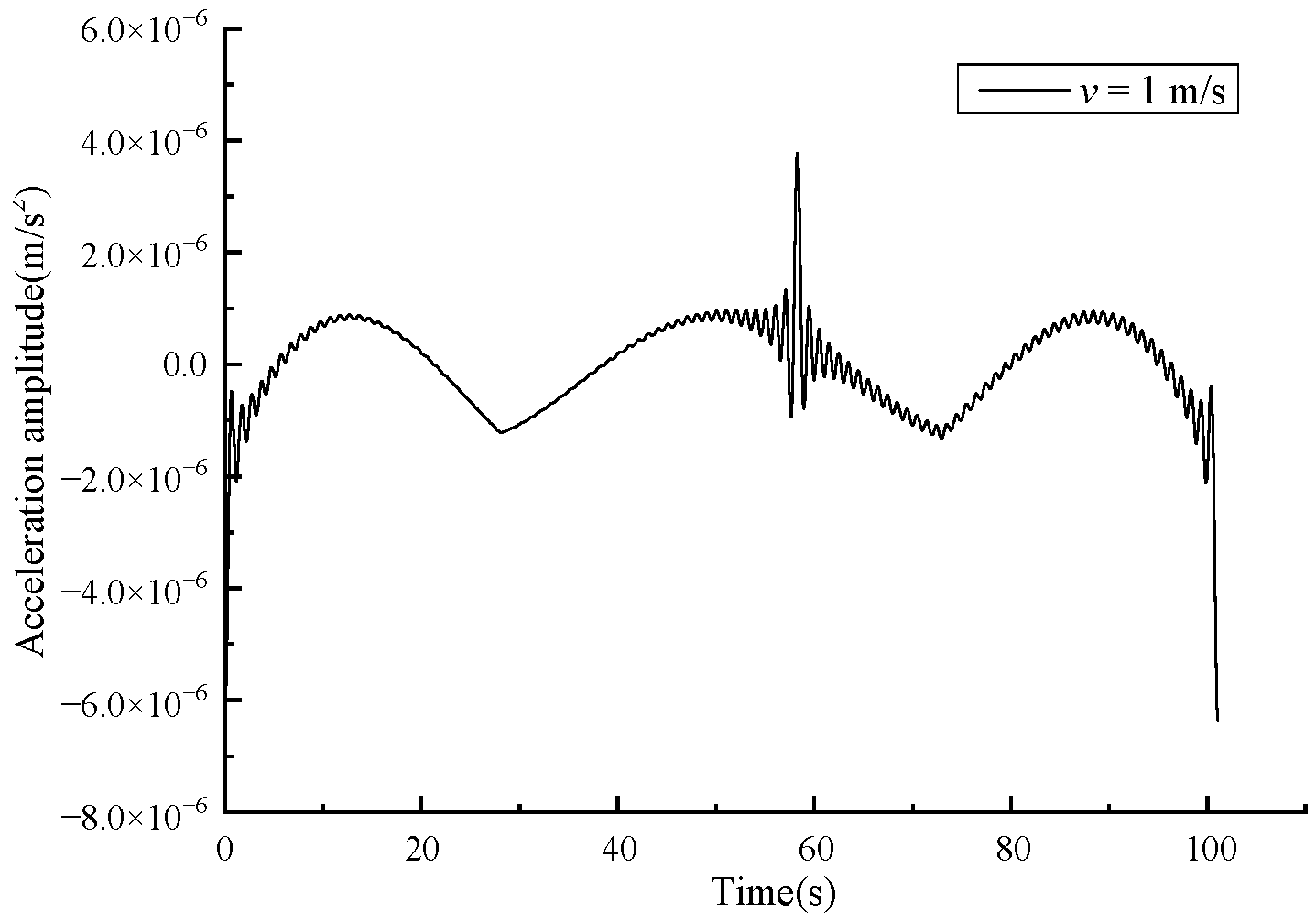
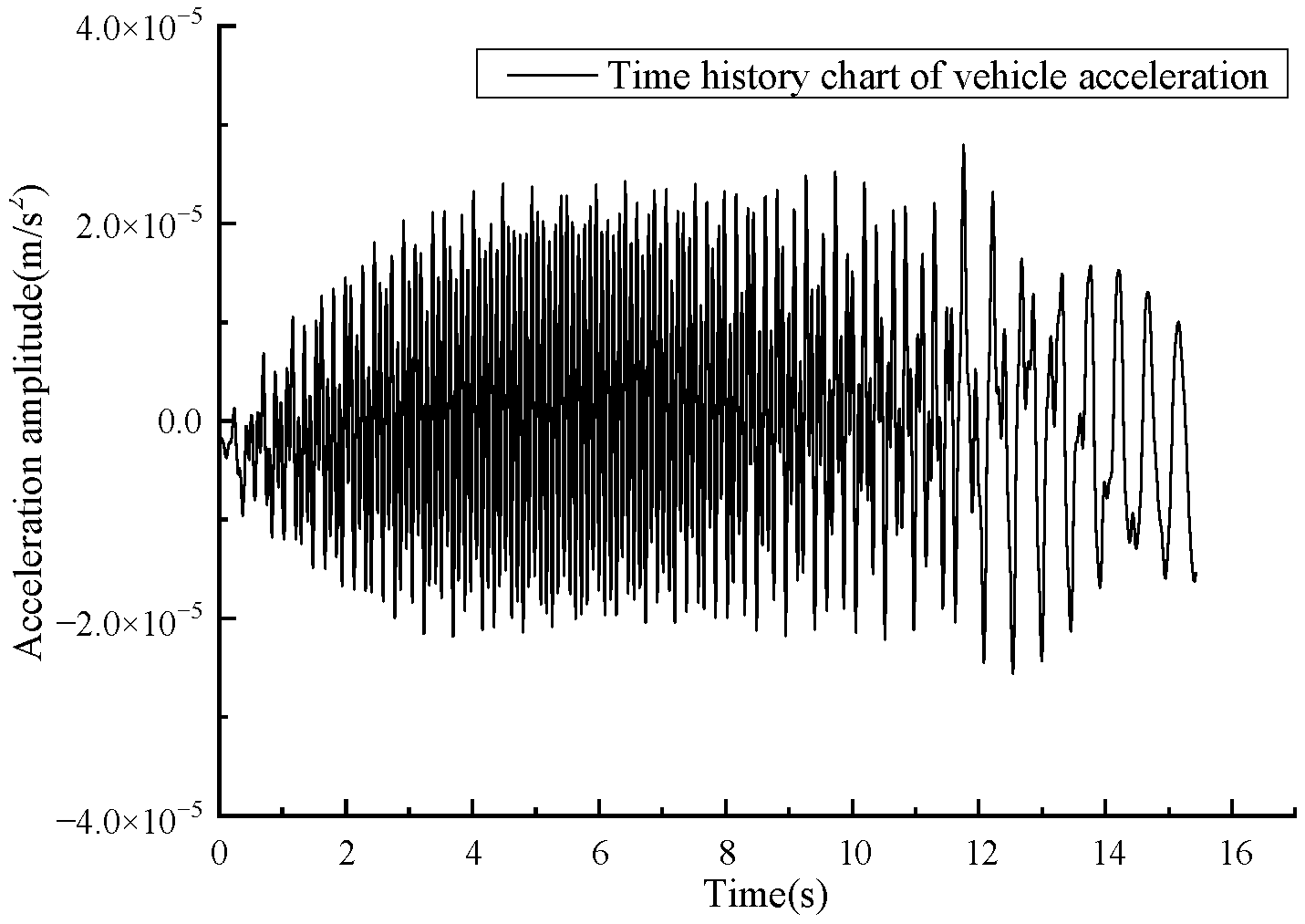
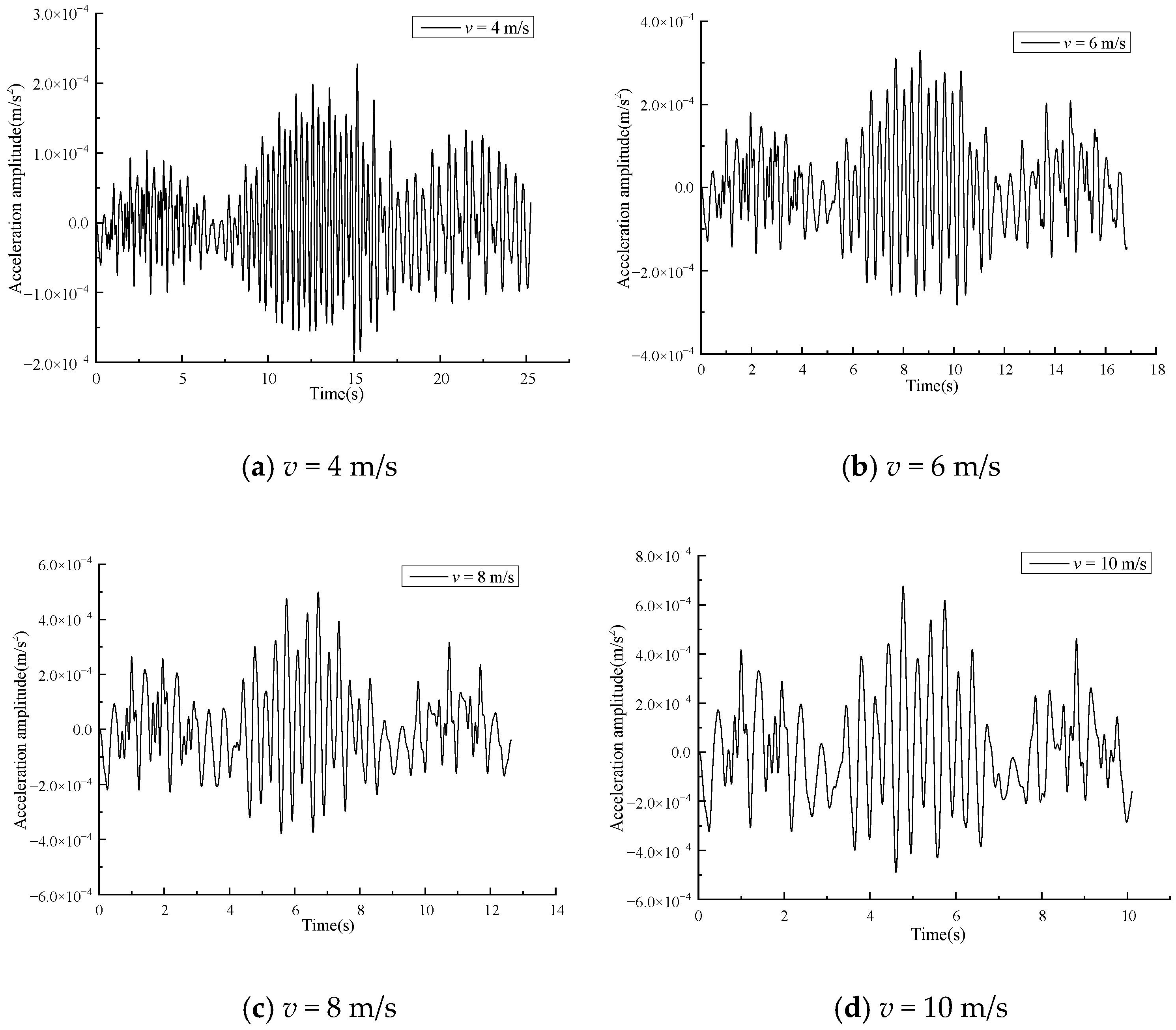
The vertical acceleration time history response of the vehicle driving through the three-span continuous beam bridge is extracted, and the result is shown in
Figure 20, when the vehicle speed is 1m/s, the time history diagram of vehicle acceleration is shown in
Figure 16.
It can be seen from
Figure 16 and
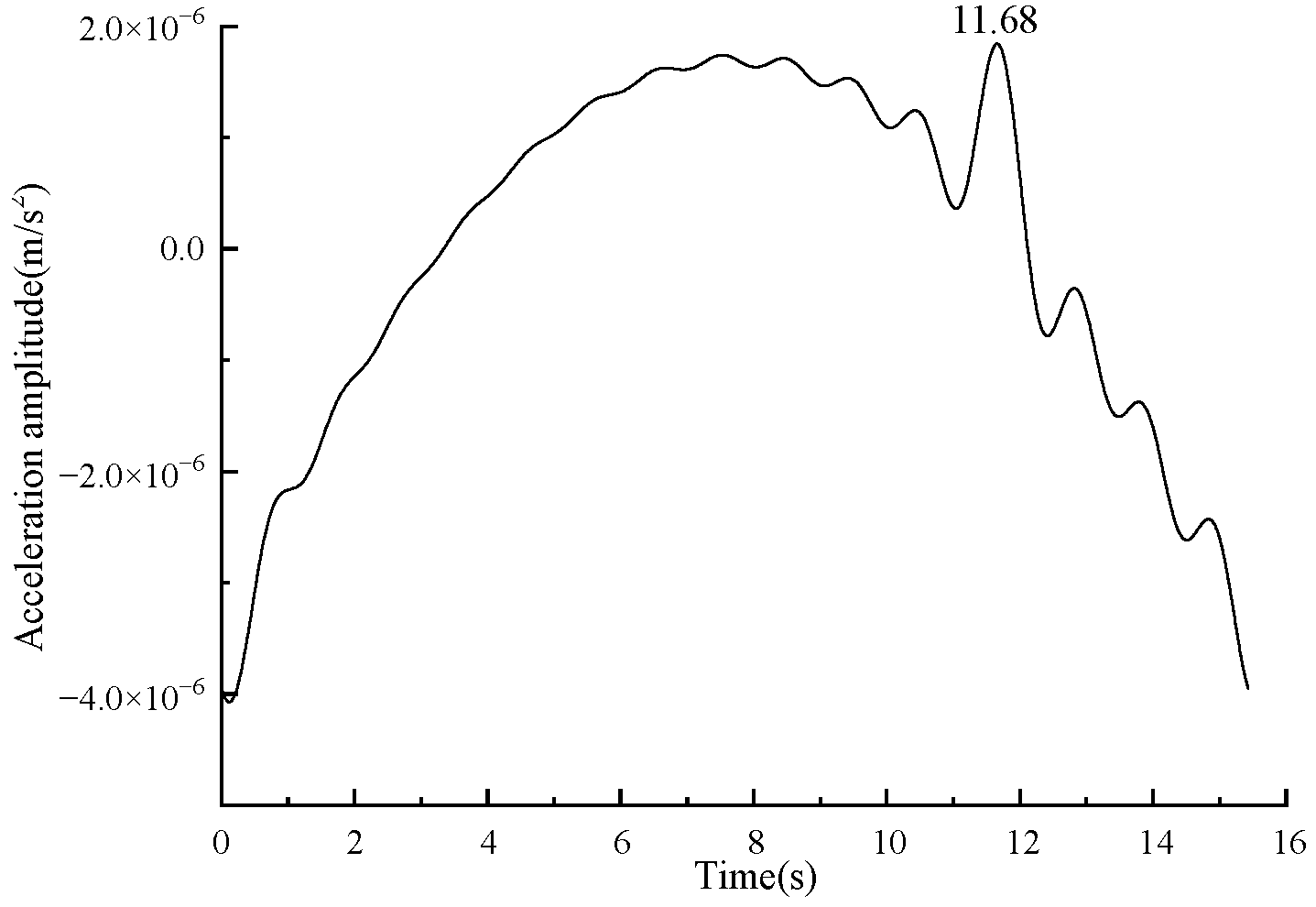
Figure 20 that when the vehicle passes through the bridge crack position, the acceleration value has a slight sudden change. This is because the vehicle vibration is completely generated by the excitation of the bridge, and any slight change in the internal structure of the bridge will have an impact on the acceleration response of the vehicle. Here, the vehicle does not consider the impact of its own damping. As the vehicle speed increases, it can be seen that the sudden change in amplitude at the crack location is gradually insignificant or even difficult to identify. This is because the higher the vehicle speed, the weaker the vehicle’s ability to collect bridge information, especially the microscopic damage. In addition, the filtering range used in this paper is 0–1 Hz. When the vehicle speed increases, the first-order driving frequency increases, the high-order driving frequency in this filtering range decreases, and the damage information contained in the IAS identification diagram lessens. As the filtering range is not unique, the filtering range can be appropriately expanded in the identification process, and attention should be paid to avoiding the interference of the vehicle’s own frequency signal leakage [
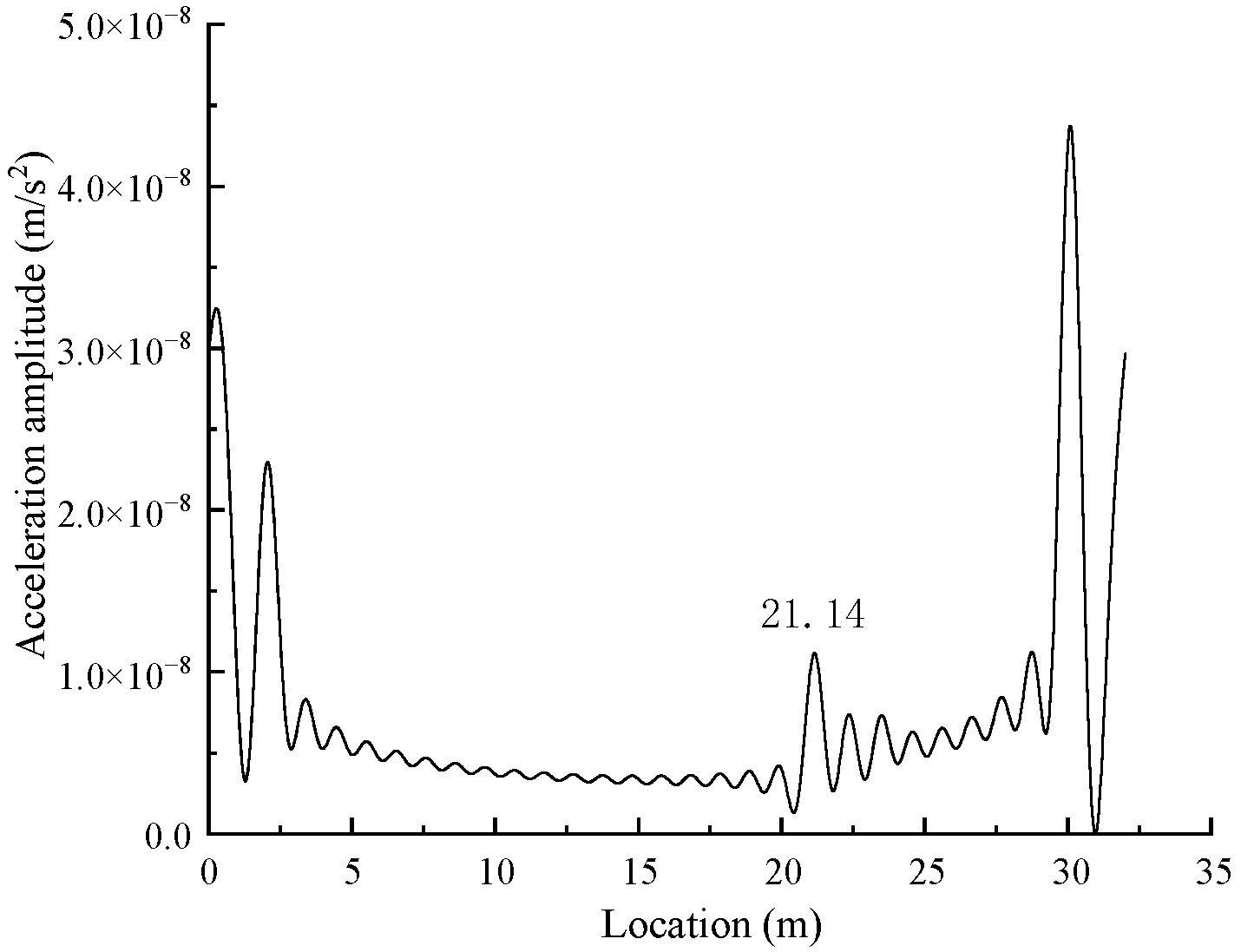
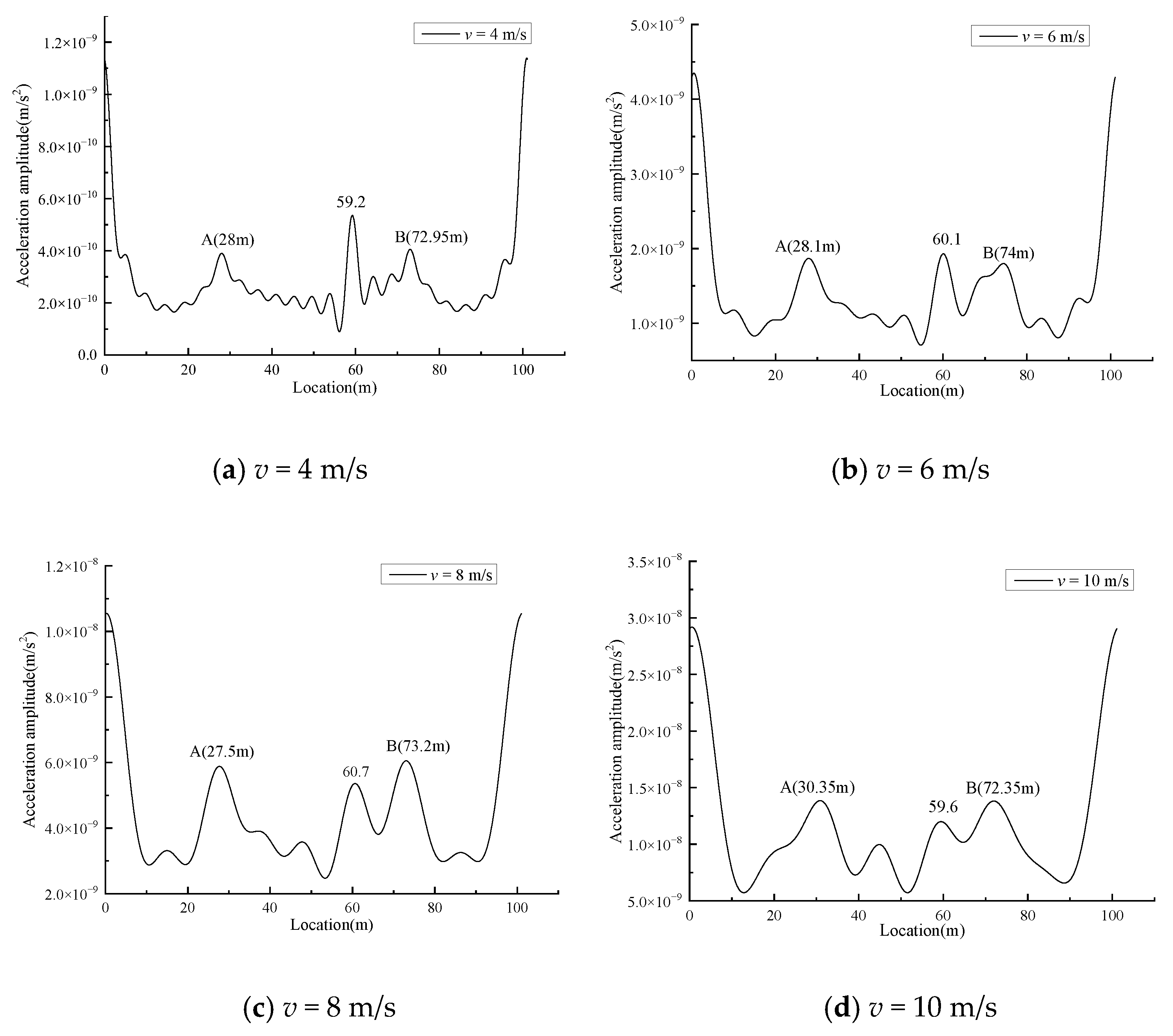
45]. In the process of vehicle design, in order to reduce the influence of vehicle frequency, the stiffness of the vehicle should be increased as much as possible. IAS identification results are shown in
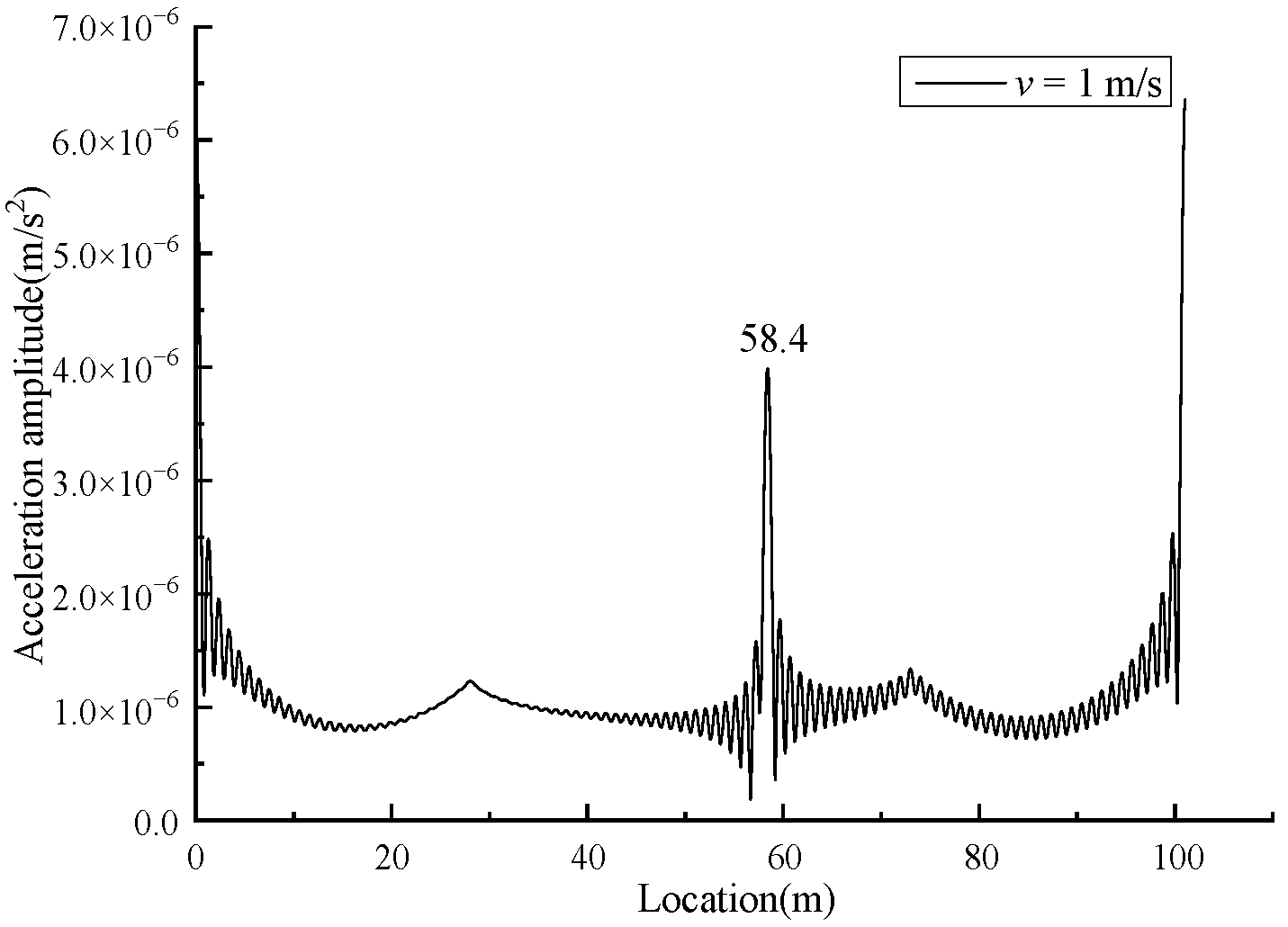
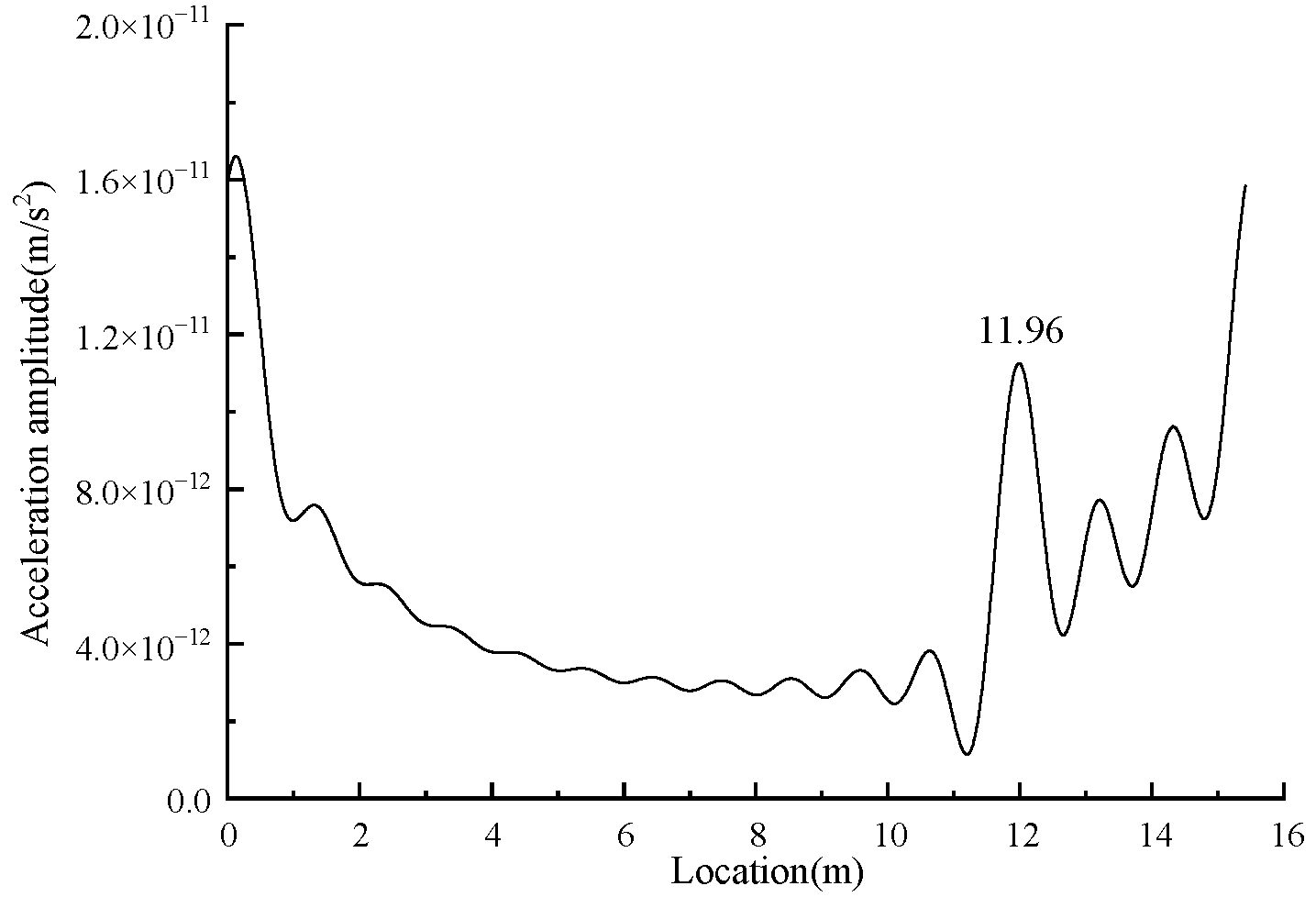
Figure 21, When the speed is 1m/s, IAS recognition results are shown in
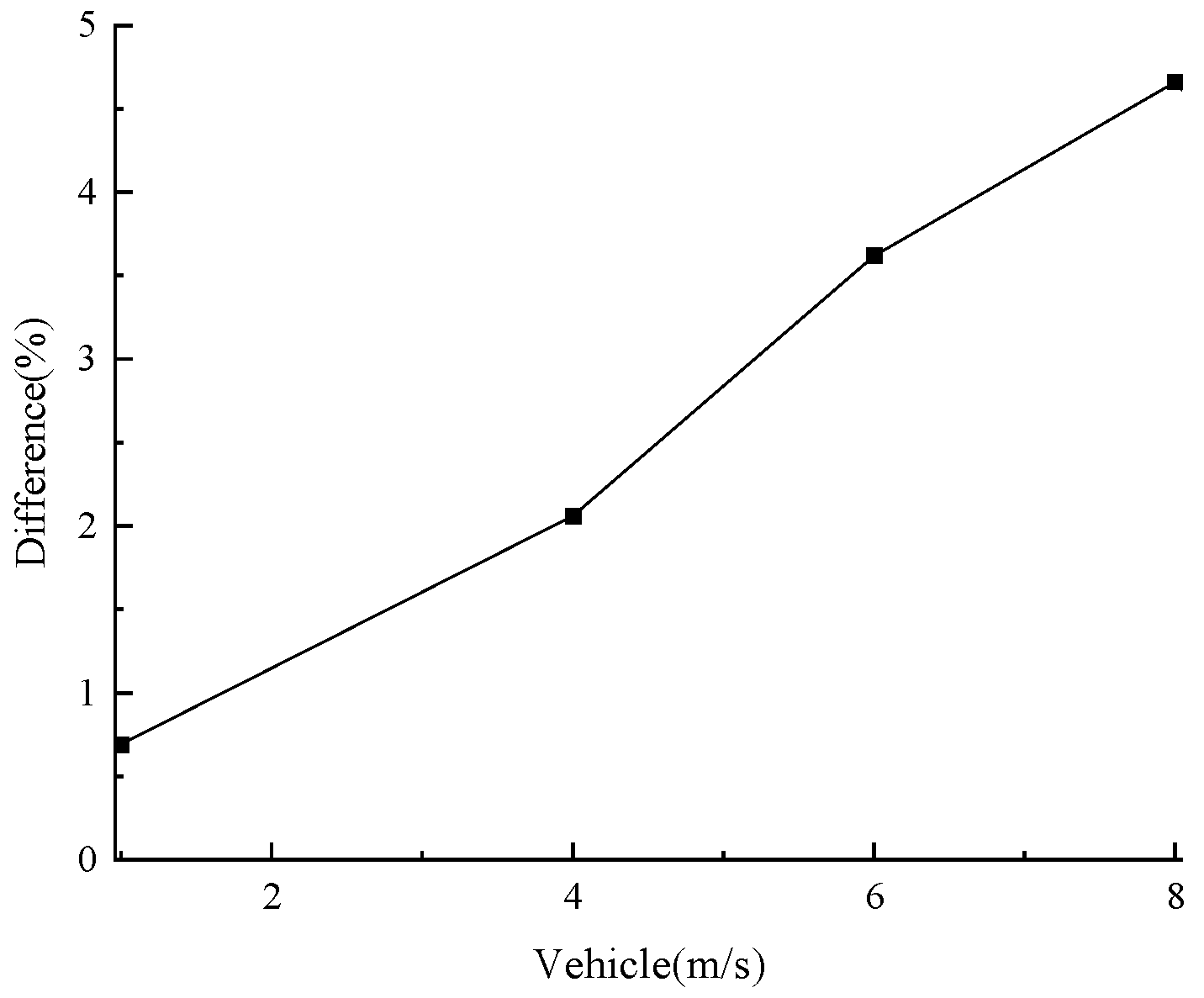
Figure 15. The relationship between bridge damage identification accuracy and vehicle speed is shown in
Figure 22 and
Table 7. It can be seen from
Figure 15 and
Figure 21 that with the increase in vehicle speed, the peak resolution of the damage position in the IAS diagram decreases. Since the IAS method can accurately detect the change in the stiffness of the bridge structure, protrusions will occur at the bridge bearing position, corresponding to points A and B. When the vehicle speed is 4 m/s and below, the IAS method can preferably identify the crack damage location of the bridge. When the vehicle speed is between 4–8 m/s, it is prone to damage misjudgment. At this time, the damage location can be determined by artificially eliminating the protrusions at the bearing position. When the vehicle speed is 10 m/s, the damage location cannot be determined. It can be seen from
Figure 22 that as the vehicle speed increases, the damage location identification error increases. In actual bridge detection, it is recommended that the measuring vehicle travels at a uniform speed of no more than 4 m/s.




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}