1. Introduction
The safe operation of trains is the prerequisite for the continuous development of high-speed railways. Therefore, it is essential to study the operation control of high-speed trains and ensure the safe operation of trains. Trains are automatically monitored and adjusted through the train operation control system, which is the core technology to ensure the safe and efficient operation of high-speed trains. With the continuous improvement of the running speed of high-speed trains, it has become increasingly difficult for train drivers to cope with various complicated situations in the process of train operation. So, the automatic train control system (ATC) has been developed accordingly [
1].
In the past few years, many train operation control methods have been studied, most of which have focused on single high-speed trains. These have included but are not limited to fault-tolerant control [
2], neural network control [
3], sliding mode control [
4], fuzzy control [
5], and robust control [
6]. In [
7], a self-organizing radial basis function neural network (RBFNN) was adopted to approximate the nonlinear factors of the train, and the non-singular terminal sliding mode control strategy was designed to control the train. Based on the high-speed train model, Yao et al. [
8] discussed the fault-tolerant control problem of high-speed train in the case of multiple faults. In this paper, the author adopted the Markov jump system model method and proposed the active fault-tolerant composite layered anti-interference strategy, which achieved the purpose of making the system stable and met the desired performance. Zhai et al. [
9], based on the guidance system of the high-speed maglev train, designed a controller using
robust control theory to achieve the stable operation of the system under different conditions.
Due to the rapid development of the multi-agent technology in recent years [
10], a large number of related studies based on the multi-agent system (MAS) model have emerged, and their applications in the control field have become increasingly extensive, such as intelligent robot control [
11] and traffic control [
12]. Multi-agent cooperative control includes consensus, formation, and flocking [
13,
14,
15,
16]. As a typical problem in the field of multi-agent cooperative control, multi-agent consensus control has attracted significant attention [
17,
18,
19]. The linear multi-agent consensus control strategy has been the main research goal of researchers. In [
20], an optimal control strategy for linear multi-agent consensus was proposed, which optimized the global cost function to achieve multi-agent consensus. Li et al. [
21] proposed a distributed consensus control protocol for linear multi-agent systems with input delay and discontinuous communication. Due to the influence of the system itself and external factors, most systems have nonlinear characteristics. Therefore, it is necessary to study the nonlinear system. Liu [
22] studied the problem of adaptive cooperative output regulation based on nonlinear multi-agent systems. In [
23], the double integrator LISIC (DILISIC) was introduced for a nonlinear multi-agent system with uncertain high-order dynamics and external perturbations.
With the rapid development of the railway wireless communication technology, the rapid exchange of information between trains can be realized, which makes the cooperative control of multiple high-speed trains possible [
24]. Based on the multi-agent model and the mature railway communication technology, the research on the consensus control of multiple high-speed trains is a new hotspot in the research on the safe and efficient operation of multiple high-speed trains. Wang et al. [
25] utilized a disturbance observer to approximate disturbance in the process of the train operation and adopted LMI to work out a sufficient condition for the existence of the distributed control strategy and the observer gain parameter. The goal of tracking different expected speeds of multiple high-speed trains and maintaining ideal spacing between two adjacent trains was realized. Based on the railway moving block signal system, Bai et al. [
26] discussed the problem of multiple high-speed trains’ cooperative control under the condition of train actuator saturation. Guo et al. [
27] studied the problem of implementing the consensus control of high-speed trains by adopting the adaptive fuzzy fault-tolerant control method under the condition of actuator failure, external disturbance, and unknown nonlinear dynamics on the basis of multiple high-speed trains.
In the past, most control problems were solved by the Riccati equation or its inequality [
28]. However, when solving the Riccati equation or its inequality, a large number of parameters needed to be adjusted in advance. So, it is difficult to find the solution to the problem. Therefore, the proposal of LMI and the interior point method for solving convex optimization problems provides effective tools for the analysis and solution of many control problems, which have been widely used in the analysis and design of control systems [
29]. In [
30], a stable controller was designed for a nonlinear fractional system with time-varying delay, and LMI was used to provide the sufficient stability condition of the delay system and solve the controller gain matrix. Ali et al. [
31] proposed a compensator based on LMI to ensure the robustness of the control system.
The traditional time-triggered method is still the first choice of many researchers, but the sampling period is designed based on the worst-case scenario in the time-trigger method. Taking the minimum time interval to meet the control requirements, this method occupies a large number of limited network resources. Under the background of limited railway communication network and advocating energy conservation and emission reduction, the event-triggered mechanism [
32] has been applied increasingly widely. Event-triggered mechanism is based on the current system status and certain rules (trigger conditions) to determine whether trigger conditions are met. When the current state information of the system meets certain rules, the train information exchange and controller update can be carried out. Therefore, this method can fundamentally reduce the transmission times of information and energy consumption. Event-triggered sampling was initially proposed for a single agent [
33,
34]. Then, it was extended to the multi-agent system in [
35]. In recent years, a large number of scholars have studied the event-triggered control of multi-agents [
36,
37,
38]. Postoyan et al. [
39] proposed a framework for the event-triggered stabilization of nonlinear systems using hybrid systems tools. Wang et al. [
40] studied the second-order consensus problem of a single high-speed train with time-varying actuator faults under an event-triggered mechanism. Shi et al. [
41] studied the wireless sensor routing protocol based on event-triggered mechanism in high-speed railways and verified that the system can reduce the data number of nodes and the energy consumption of nodes under this mechanism.
On the basis of the continuous development of the event-triggered mechanism, the event-triggered consensus control was widely applied in different systems. In order to reduce the communication load of the multi-agent network and the update frequency of the controller, the event-triggered mechanism has been applied in the consensus control protocol [
42,
43]. Guo et al. [
44] proposed a sampled data consensus control protocol based on the event-triggered mechanism, which transformed the consensus problem of distributed multi-agent systems into the stability problem of distributed multi-agent systems. Liu et al. [
45] studied the event-triggered consensus control problem of multi-agents with general linear dynamics. Li et al. [
46] studied the consensus control and fault estimation of a class of time-delay multi-agent systems with Markov switching topology based on the event-triggered mechanism, which alleviated the network load of the system to a certain extent. In [
47], the output consensus problem of the linear heterogeneous multi-agent was studied, and a new adaptive dynamic event-triggered mechanism was proposed, which reduced the resources consumed by the communication between agents to a certain extent and the update frequency of the controller.
Based on event-triggered consensus control strategy and nonlinear multi-agent model, this paper studies the consensus control of multiple high-speed trains. The main contributions of this paper are as follows:
- (1)
Based on the communication system of multiple high-speed trains, the consensus control problem of multiple high-speed trains is transformed into the cooperative problem of the multi-agent system with leader–follower.
- (2)
The event-driven cooperative control of the multi-agent system with unknown input is studied, an event-triggered strategy is proposed, and a distributed event-driven controller based on an observer is designed to realize the consensus control of multiple high-speed trains system with nonlinear dynamics.
- (3)
The event-triggered control strategy adopted reduces the information transmission between trains and the update times of controllers, saving the bandwidth of the railway communication network to a certain extent.
This paper adopts standard notation: denotes the set of dimensional matrices. means that is a positive definite (positive semidefinite) symmetric matrix. denotes the n-dimensional unit vector. denotes diagonal matrix or diagonal block matrix. represents the smallest eigenvalue of matrix . means the transpose matrices of , and means the inverse matrices of . The Kronecker product of a matrix and is denoted by .
2. Preliminaries and Problem Description
2.1. Preliminaries
Based on the theory of graph theory and multi-agent model, this paper establishes a train communication model.
The information exchange of a multi-agent system is represented by a weighted directed graph. A weighted directed graph can be expressed as . denotes a set of nodes. represents an edge set, which can be regarded as the connection channel of nodes in set . Edges can be represented by , which means that the information transmission direction is from node to node . denotes the adjacency matrix, whose constituent elements represent the weights between any pair of nodes. For any , . If , which means that node can obtain its relative state information from its neighboring node j, then ; otherwise, . The set of neighboring nodes of node can be denoted by . The Laplace matrix of the graph can be defined as where . is an in-degree matrix of and .
For the motion of
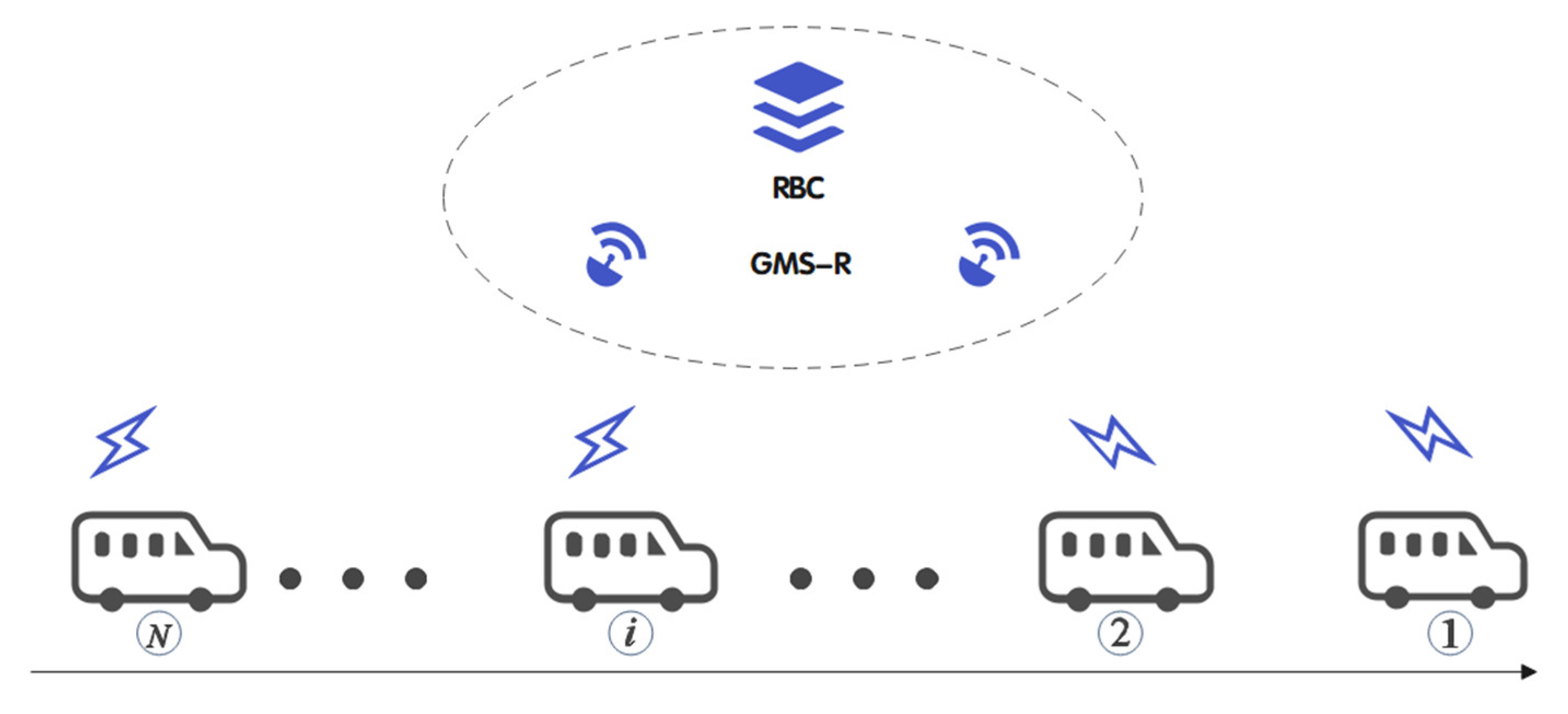
high-speed trains, each train can be regarded as a node in the graph, and its topology can be represented by a simple graph. Suppose
is the adjacency matrix of the communication relation between trains. When
,
; otherwise,
. Considering the communication between train
and neighboring trains, the first train only communicates with the second train, and the last train only communicates with the penultimate train. Assume that the leader train of a multiple high-speed trains system is labeled 1, and the follower train is labeled
, respectively. In this paper, it is considered that the leader train can only transmit information and does not accept information from other tracking trains. So, the Laplace matrix can be represented as
where
and
are symmetric matrices.
Related definitions and lemmas:
Definition 1 ([
48], one-sided Lipschitz condition).
Suppose there exists a constant value , a vector , and a nonlinear functionsatisfies:
Definition 2 ([
48], quadratic inner-boundedness constraint).
Assumes constant value , existing vector , nonlinear function
satisfies:
Lemma 1. (Young’s inequality) for any vector , the following inequality holds:
For the convenience of the following content description, the following hypotheses are proposed:
Assumption 1. The nonlinear function in the system satisfies the conditions in Definitions 1 and 2.
Assumption 2 ([
49]).
The matrix pair is controllable and is observable. Assumption 3. The communication topology graph has a spanning tree with a leader as a root.
2.2. Problem Description
In this paper, multiple high-speed trains are taken as the research object, and the trains dynamics model is established through Newton’s second law.
The communication system of the high-speed trains are shown in the
Figure 1.
Let
and
be the position and speed of train
and
be the expected distance of any two consecutive trains. Then, the dynamic model of the trains can be described as follows:
where
is the driving or braking force, and
and
are the basic running resistance, including aerodynamic resistance; rolling mechanical resistance; and the additional drag caused by ramps, curves, and tunnels, respectively [
50].
represents the total mass of train
.
where
,
,
are the resistive coefficients.
,
are the drag caused by ramps, curves, and tunnels, respectively.
is the acceleration due to gravity.
is the gradient of the ramp.
The additional resistance can be modeled as an external disturbance and represented by a nonlinear function , . Define the new control input as .
Further, the model becomes
The dynamic model of the leader train can be expressed as
where
and
represent the position and speed of the leader train, respectively. In this paper,
is set as the acceleration of the leader train.
Taking , where denotes the distance between train and the leader train. The external interference can be expressed as a nonlinear function , and it is assumed that the nonlinear function satisfies Definitions 1 and 2.
To sum up, the dynamic model of the train can be expressed as follows:
Meanwhile, it can be obtained that the model of the leader train can be expressed as
Remark 1. The consensus problem of multi-agent systems with nonlinear leader–follower was studied, and a distributed consensus controller was designed in [
51,
52]
. The above literature results are all based on the assumption that the leader’s control input is zero. It is obviously not applicable for the leader train control input to be zero. Therefore, this paper studies a class of multi-agent consensus control in which the leader has unknown input. In this article, the ultimate goal to be achieved is . Therefore, the multiple high-speed trains system can be transformed into a specific multi-agent model, so the consensus control problem of multiple high-speed trains is solved.
In the actual operation process of multiple trains, in order to prevent the collision between trains and maintain the safe distance between trains, we set the upper limit of the position error and speed error of trains in advance.
Set the maximum value of position tracking error to
.
Set the maximum value of speed tracking error to
.
3. Distributed Multiple High-Speed Trains Consensus Control Algorithm Based on Event-Triggered Strategy
In this section, the leader train in the multi-train system is labeled as train 1, and the control input of the leader train
is assumed to be an unknown constant value. Therefore, the following control protocols can be proposed to achieve the consensus control of multiple high-speed trains:
where
is the coupling weight satisfying
and
is the feedback gain matrix to be determined.
The state observer of the following form is given:
where
denotes the observed state of the agent
and
is the observer gain matrix.
Theorem 1. Considering the Lipschitz nonlinear system, is observable. If and satisfy the linear matrix inequality , is an asymptotically stable full-dimensional observer, where , , and represents the Lipschitz constants. In this paper, the distributed event-triggered consensus control algorithm is adopted to change the traditional time-trigger mode and reduce the communication frequency between trains and the computation of the controller, to save the communication resources to a certain extent.
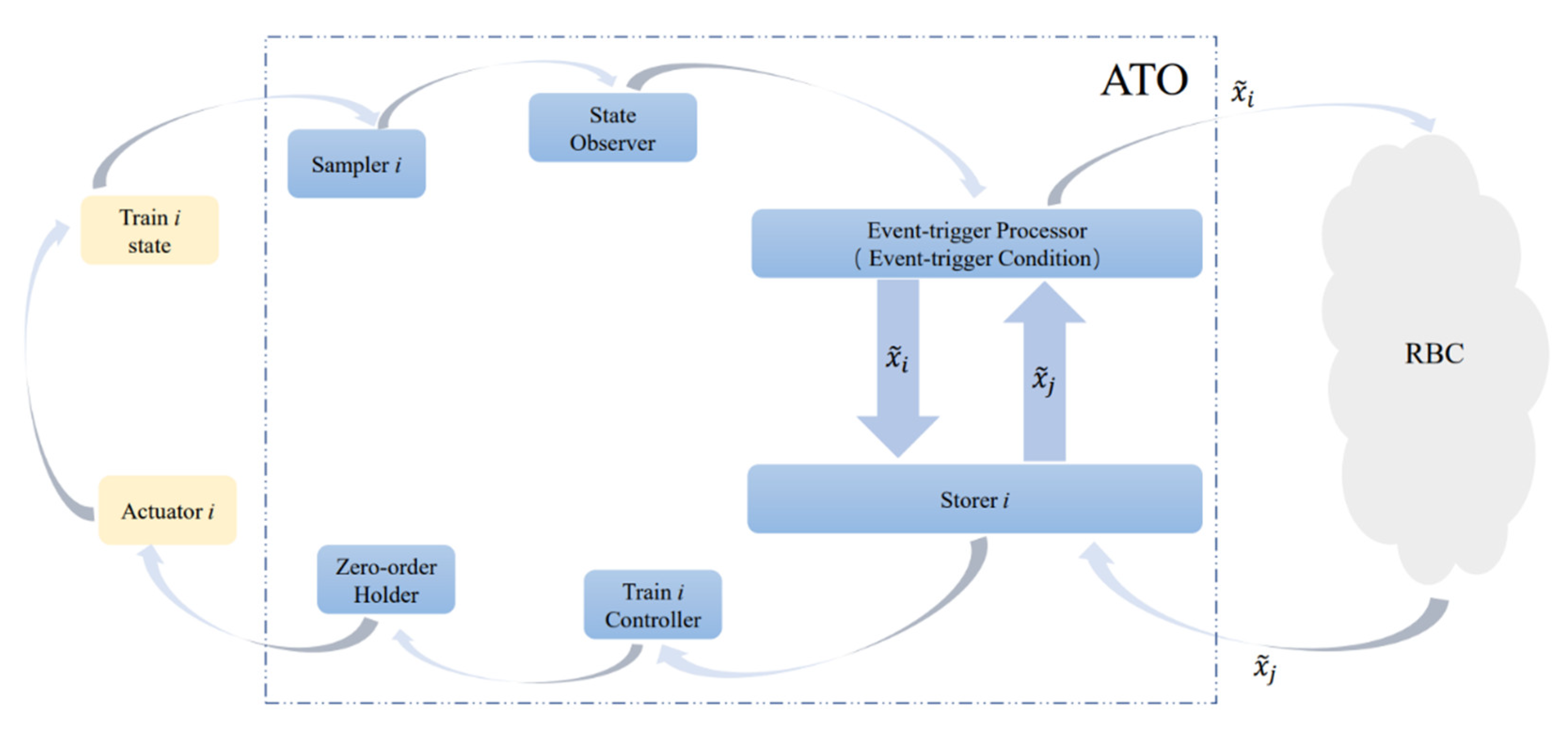
The event-triggered strategy adopted in this paper is shown in
Figure 2.
As can be seen from
Figure 2, for the multiple high-speed trains control system, we first sample the state of train
at a fixed time interval to obtain the state quantity
. Then,
is obtained through the state observer, and the state transition matrix is introduced, which can obtain
. Set the specific triggering function in advance at the event-triggered processor.
is transmitted to the event-triggered processor. If the data
satisfy the event-triggered conditions, the sampled data will be transmitted to the other trains through the radio block center (RBC), and it will also be transmitted to the data store of the train to update the information. In contrast, if the data
do not satisfy the trigger conditions, then the data will not be transmitted. The data store also received data from the other trains all of the time, referred to in the paper as
. After receiving data from other trains, the data store sends the data to the event-triggered processor. It can be seen that the data of the other train
and the data of train
are used to determine the trigger conditions. Since the data of the train
can be transmitted to the controller only when triggering conditions are met, the update of controller is also triggered by “events”. During the time interval between triggers, the input to the control remains constant and so does the control output.
The blue rectangular unit in
Figure 2 is implemented in the automatic train operation system (ATO). The event-triggered algorithm and the control quantity designed in this paper are automatically calculated and completed by the software embedded in ATO and then transmitted to the traction braking system to execute periodically through the multifunction vehicle bus (MVB) and wire train bus (WTB). ATO systems from different manufacturers have different hardware and software, but they must be able to achieve speed control, accurate parking, energy saving, and other functions, to provide a guarantee for the safe and comfortable operation of trains.
The event-triggered mechanism and state transition matrix are introduced in the control protocol. With the state observer, the control protocol can be rewritten as the following form:
where
and
.
is the last time that train
satisfies the event condition, and
is the output of the state observer of train
when it was triggered last time. The next trigger time is determined by (17).
Define as the event-triggered function, which will be explained below. indicates that an event is triggered.
The measurement error, the error between the observed value and the actual value, and the tracking error are defined as follows:
In [
35], a centralized event-triggered consensus control scheme was proposed. Based on this scheme, all agents have a common trigger function, and the trigger time of all agents is unified. The consensus of multi-agent systems in centralized and distributed event-driven schemes was studied in [
53]. Considering the characteristics and practical application conditions of multiple high-speed trains, a distributed event-triggered consensus control scheme is adopted in this paper. The judgment of the event-triggered conditions of each agent depends only on the local information of itself and its neighbors, without considering the global information of the system. Therefore, define the event-triggered conditions as (21).
where
and
are positive constants,
is the feedback matrix, and
.
By the event-triggered function (21) and the update rule (17), the next trigger moment can be determined.
Theorem 2. Considering the nonlinear system (9), there exists a feedback gain matrix , take , the matrix is a solution to the inequality (22), and there exists a scalar , , satisfying the following linear matrix inequality.
where
,
and
are the constants in Definitions 1 and 2. The system realizes the consensus control of multiple high-speed trains under the control protocol (16) and the event-triggered function (21).
Proof of Theorem 2. Since
is Hurwitz matrix, there exists a positive definite matrix
such that .
Consider the Lyapunov candidate function as
where
,
.
If
, there is
.
The derivative of
is
So, as . □
Remark 2. Since the matrix is observable, there exists a matrix such that . Choosing provide , so is a Hurwitz matrix. The derivative of
is
According to (18) and (20), the results that can be obtained are
,
. Assigning
,
, it is easy to obtain
It can be obtained from (1) and (2) that
Combined with (28), (29), and (30), we can obtain
It can be obtained by inequality (3)
Additionally, since
as
, we can obtain
Then,
where
,
,
.
Since
, there is an orthogonal matrix
that satisfies
. Set
,
, and
. Then, we can obtain
Assigning , it is easy to verify that when .
In other words, the linear matrix inequality (36) can be obtained if
is satisfied:
It can be obtained by simple form (37).
The proof is completed.
4. Simulation and Analysis
This section mainly verifies the effectiveness of the proposed event-triggered strategy and controller for multiple high-speed trains system through numerical simulation. Considering the actual situation of train operation, four trains on the same railway line are taken as the research object. The topological structure of train communication is shown in
Figure 3.
This section uses MATLAB software for simulation verification. The relevant parameters of the multiple high-speed trains system are set as follows [
54]. According to the system model,
,
, and
. The mass of each train is
. Set
,
, and
. In the operation of the train by the additional resistance
. In the simulation verification process, the acceleration of the leader train is set to
According to , the average speed of the leader train is approximately 70 m/s.
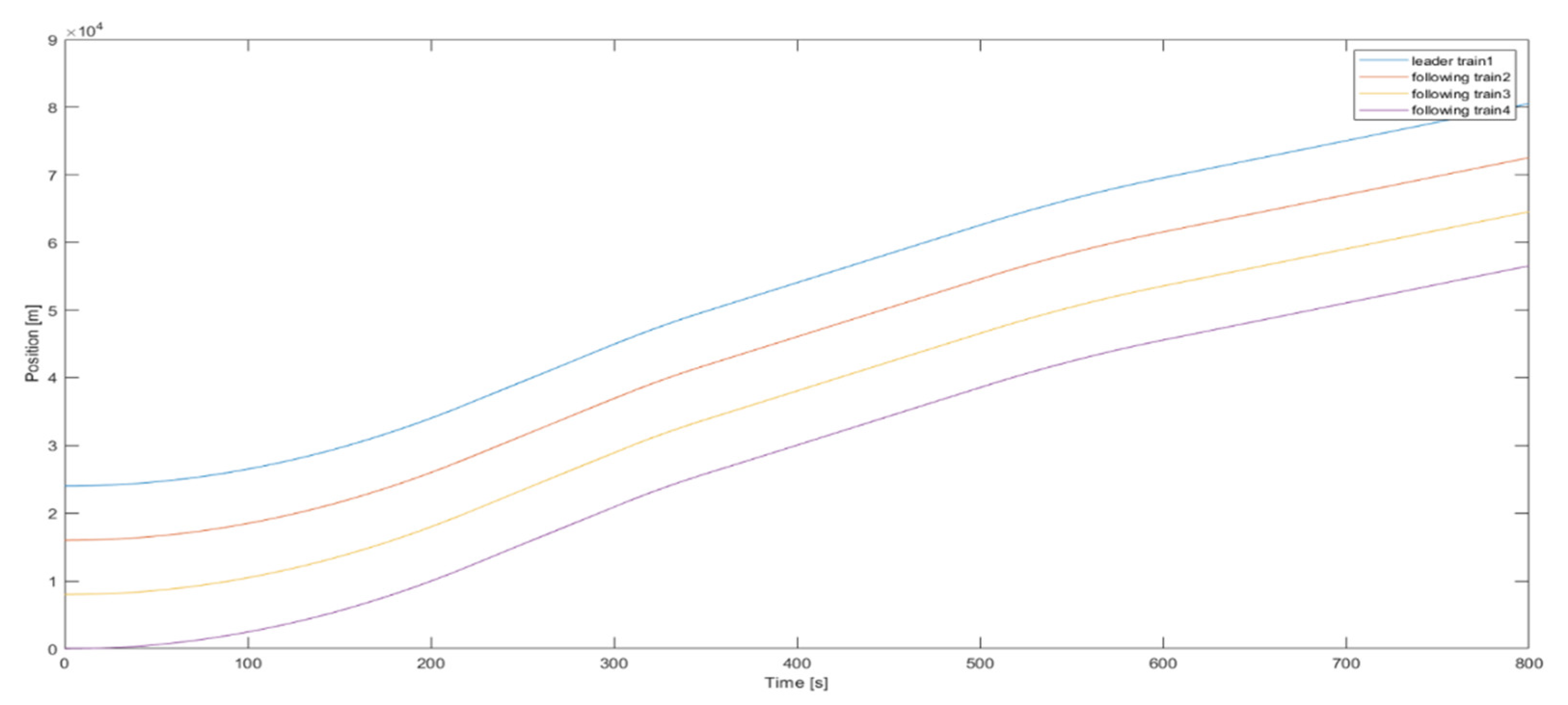
The ideal distance between any two trains is 8000 m. Set ,. The initial states of the leader train and the follower trains are set. The initial state of the leader train is , and the initial states of the follower train is ,, and .
In addition, the sampling interval is set to 0.064 s. Take
and set the parameters in the event-triggered condition as
and
. Take
and set the parameters in Definition 1 and 2
,
. By theorem 2, solving LMI (22) can get
,
. Based on controller (16) and trigger condition (21), the simulation diagram is obtained as shown in
Figure 4,
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9 and
Figure 10.
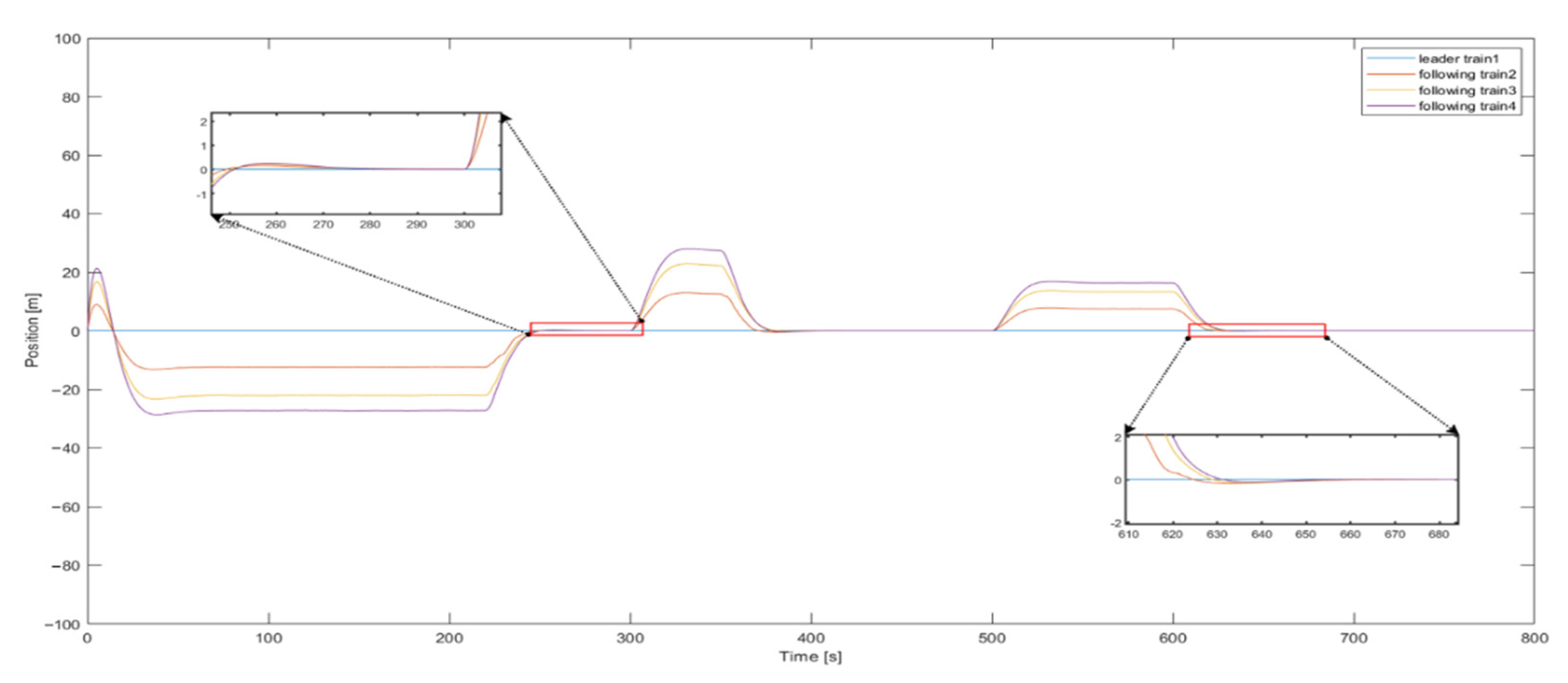
Figure 4 and
Figure 5, respectively, show the results of the trains’ position tracking. According to the picture, the position error of the train is in the range of
, which meets the objective of
.
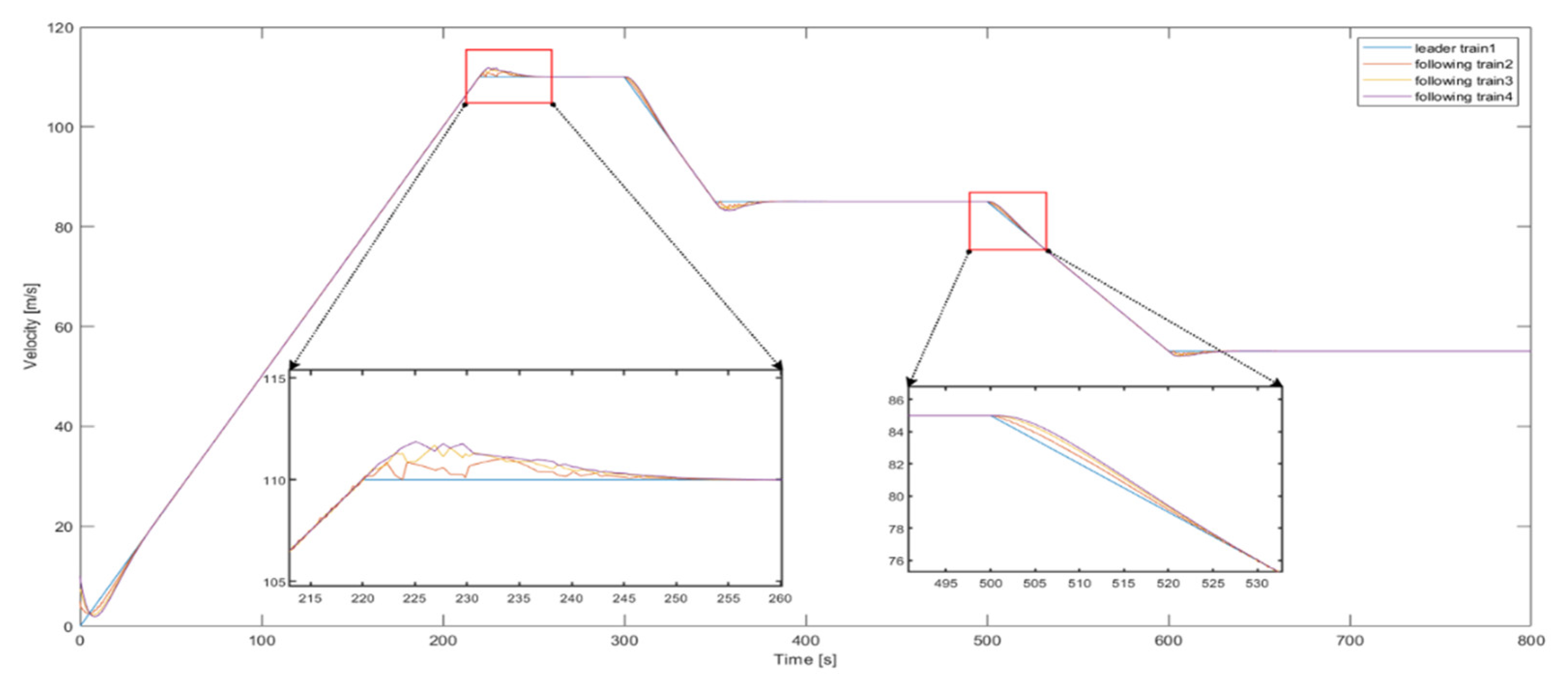
Figure 6 and
Figure 7, respectively, show the result of the speed tracking of the trains. It can be seen that, when the acceleration of the leader train exists or switches, a certain speed tracking error will be generated. The error range of train speed is between
, which meets the target of setting
in advance. The following conclusions can be drawn: in the process of operation, the speed of the tracking train can be consistent with the speed of the leader train, and the position error and speed error can converge to 0 eventually, so that the system can achieve the goal of asymptotic stability.
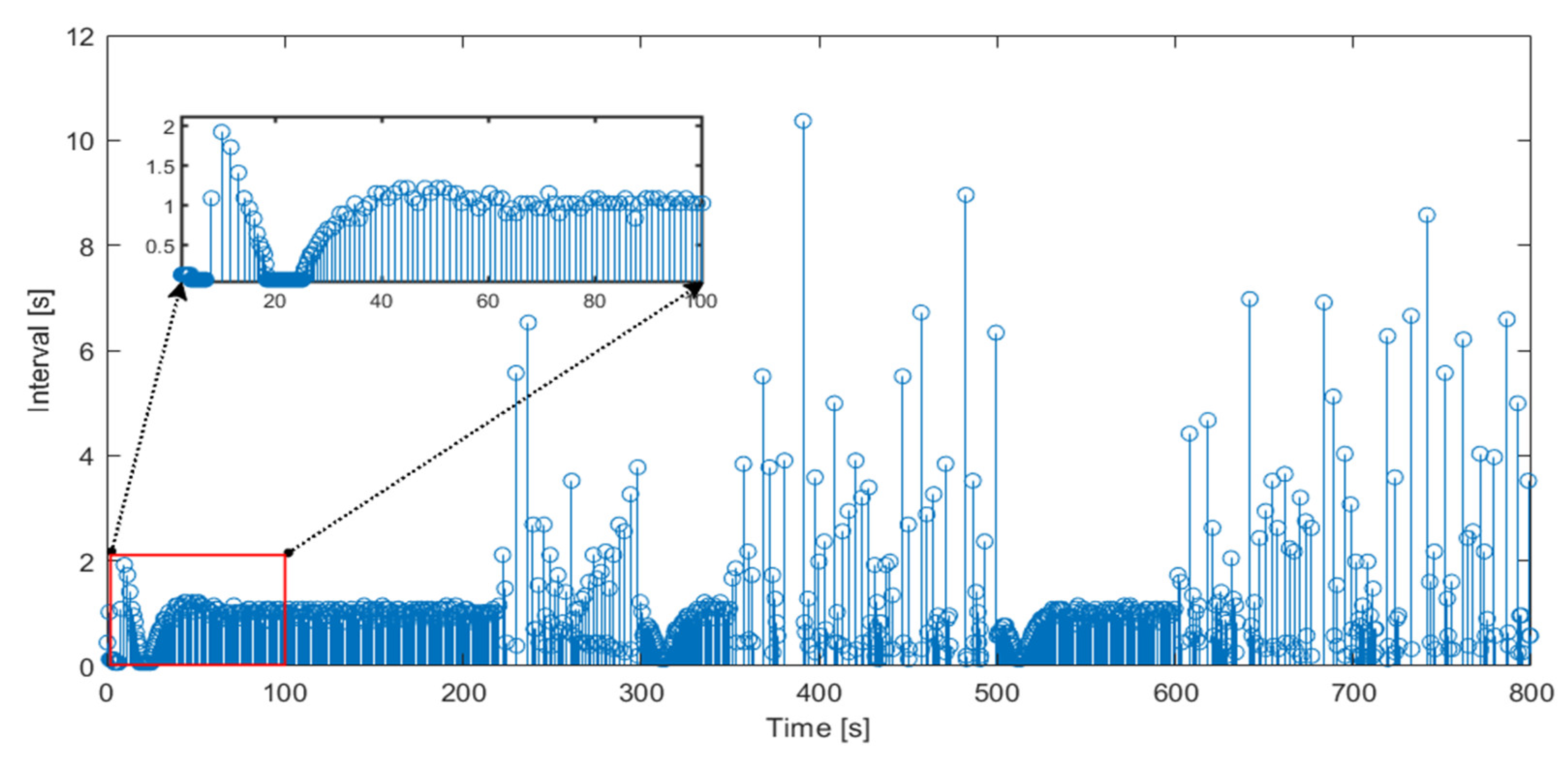
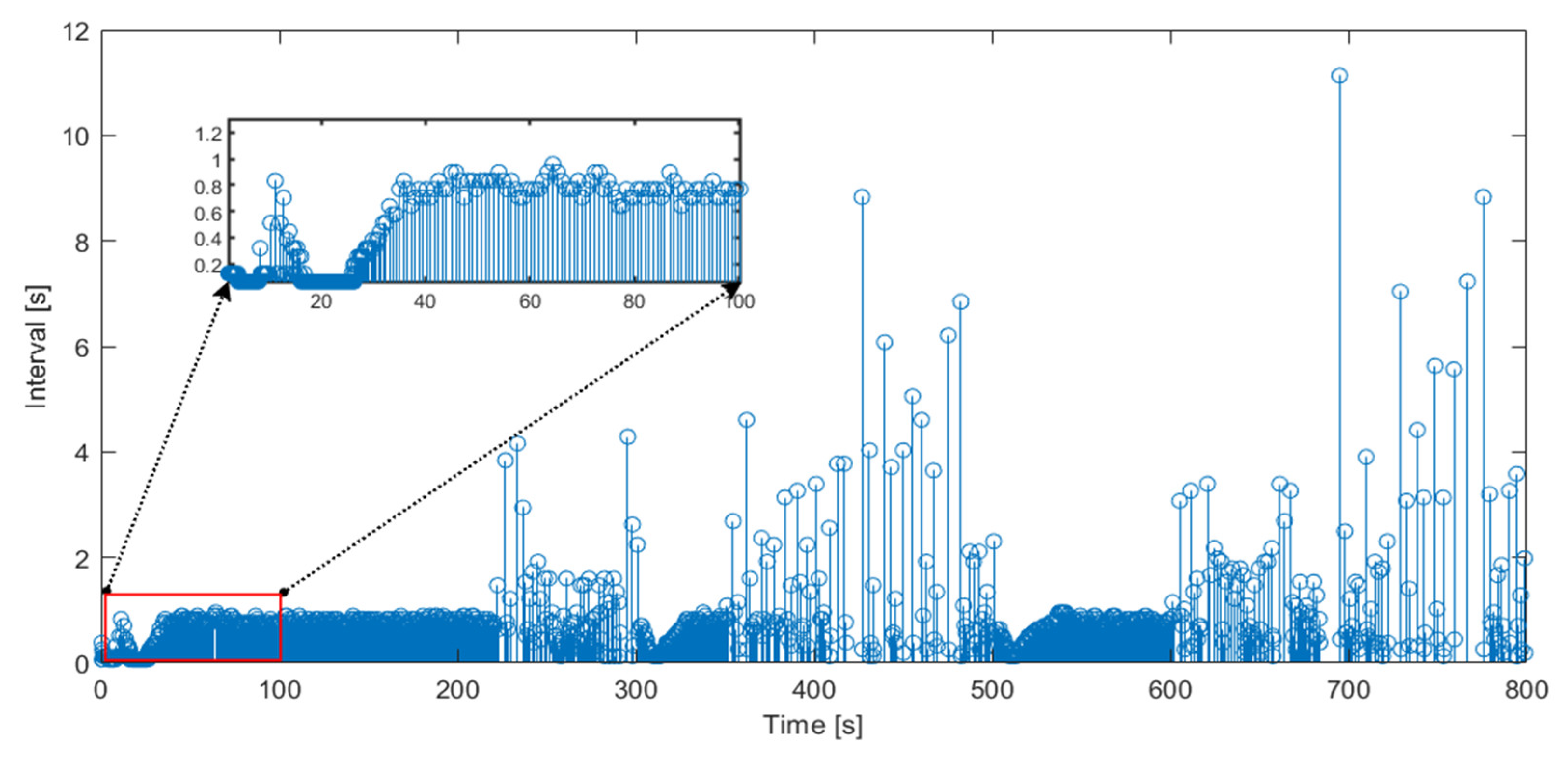
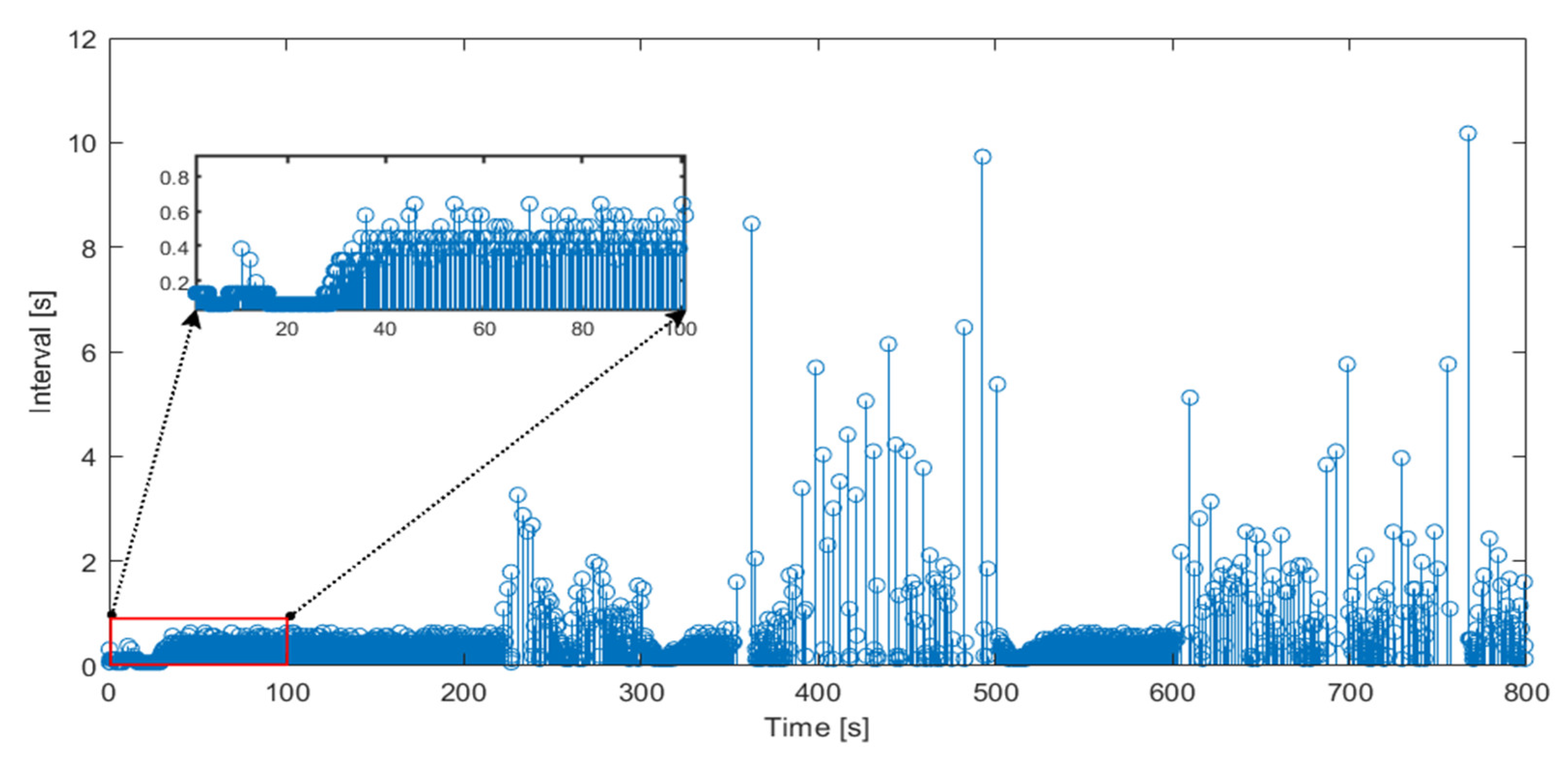
In the simulation process, the sampling interval is set to 0.064 s. If the train status information is transmitted in a time-triggered manner, the information of the follower train will be transmitted for 12,500 times and the same number of controller updates will be completed. After the event-triggered mechanism is introduced, the event-triggered time and trigger interval of the follower train are shown in
Figure 8,
Figure 9 and
Figure 10. According to the simulation results, train 2, train 3, and train 4 are triggered 889, 1192, and 1705 times, respectively, within 800 s. According to the analysis of train 4 with the most times of triggering, under the event-triggered mechanism, the state information transmission and controller update times of train 4 are greatly reduced, which is only 14% of that under the traditional time- trigger mode. It can be seen from the enlarged area in the simulation results that the trigger frequency is high and the interval is small within 30 s after the start of operation. When the train speed tends to be consistent, the trigger frequency will be relatively low, and the interval will become larger.
In event-triggered control, Zeno behavior is the occurrence of an infinite number of triggers in a finite amount of time. The reason is that the trigger conditions are constantly satisfied. When Zeno behavior occurs, the convergence of the system cannot be guaranteed, and the original intention of event-triggered control to reduce information transmission and controller update times is violated. It can be seen from the simulation results that within 800s, the system has been triggered for a limited number of times without Zeno behavior. The effectiveness of the system is further proved.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}