
A Numerical Approach for Analysing the Moving Sofa Problem


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
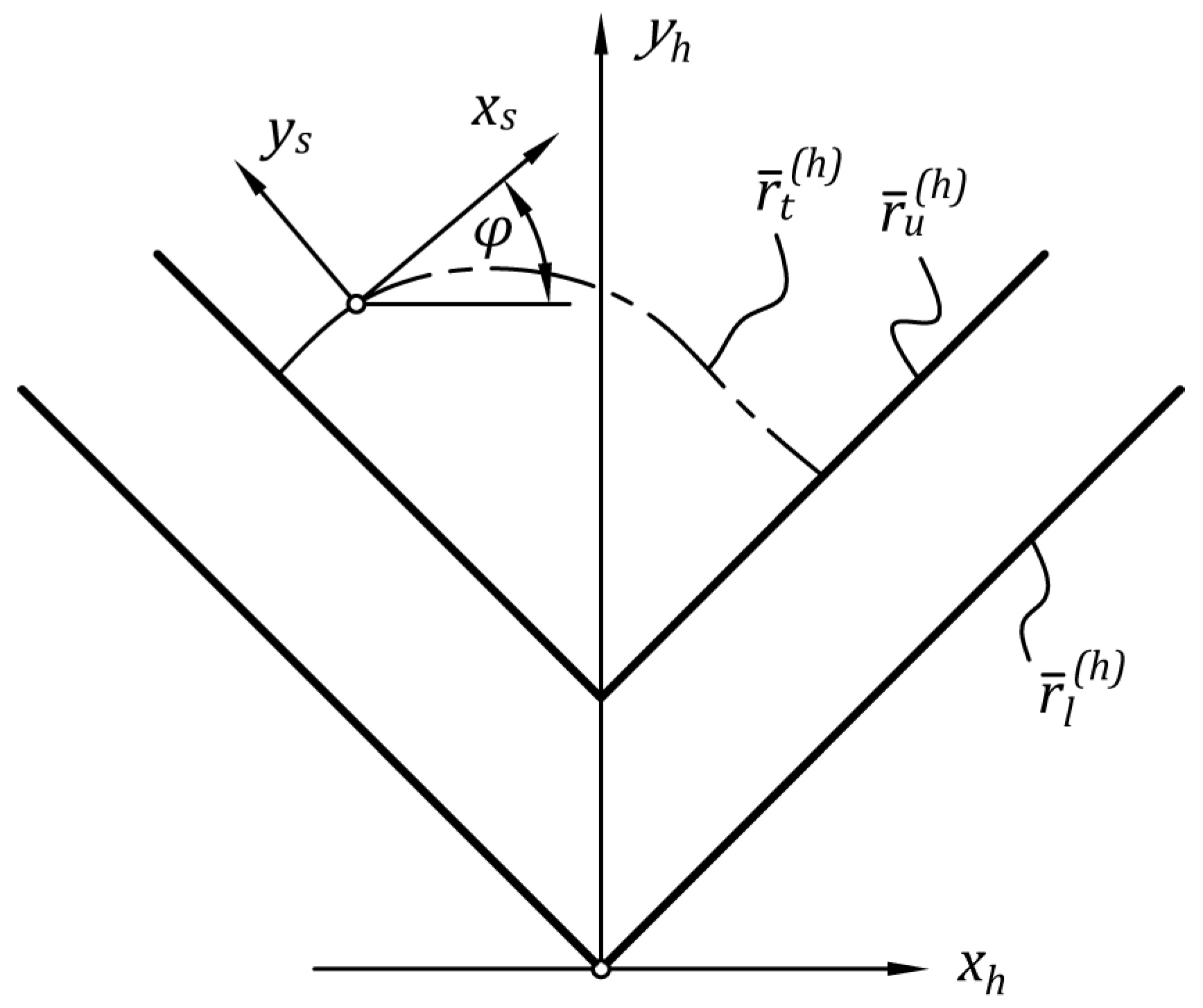
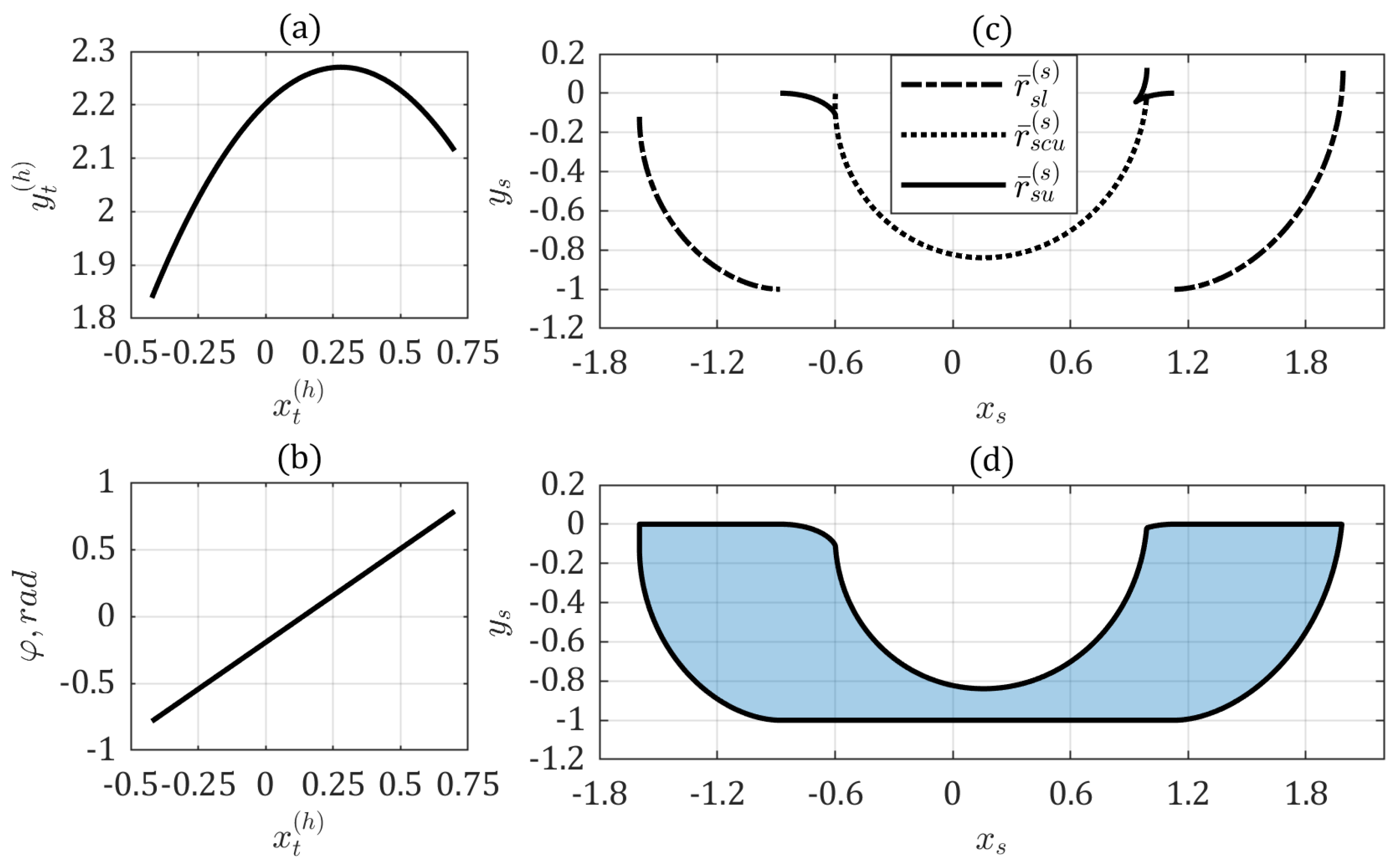
2. Sofa Generation
3. Application of the Proposed Method
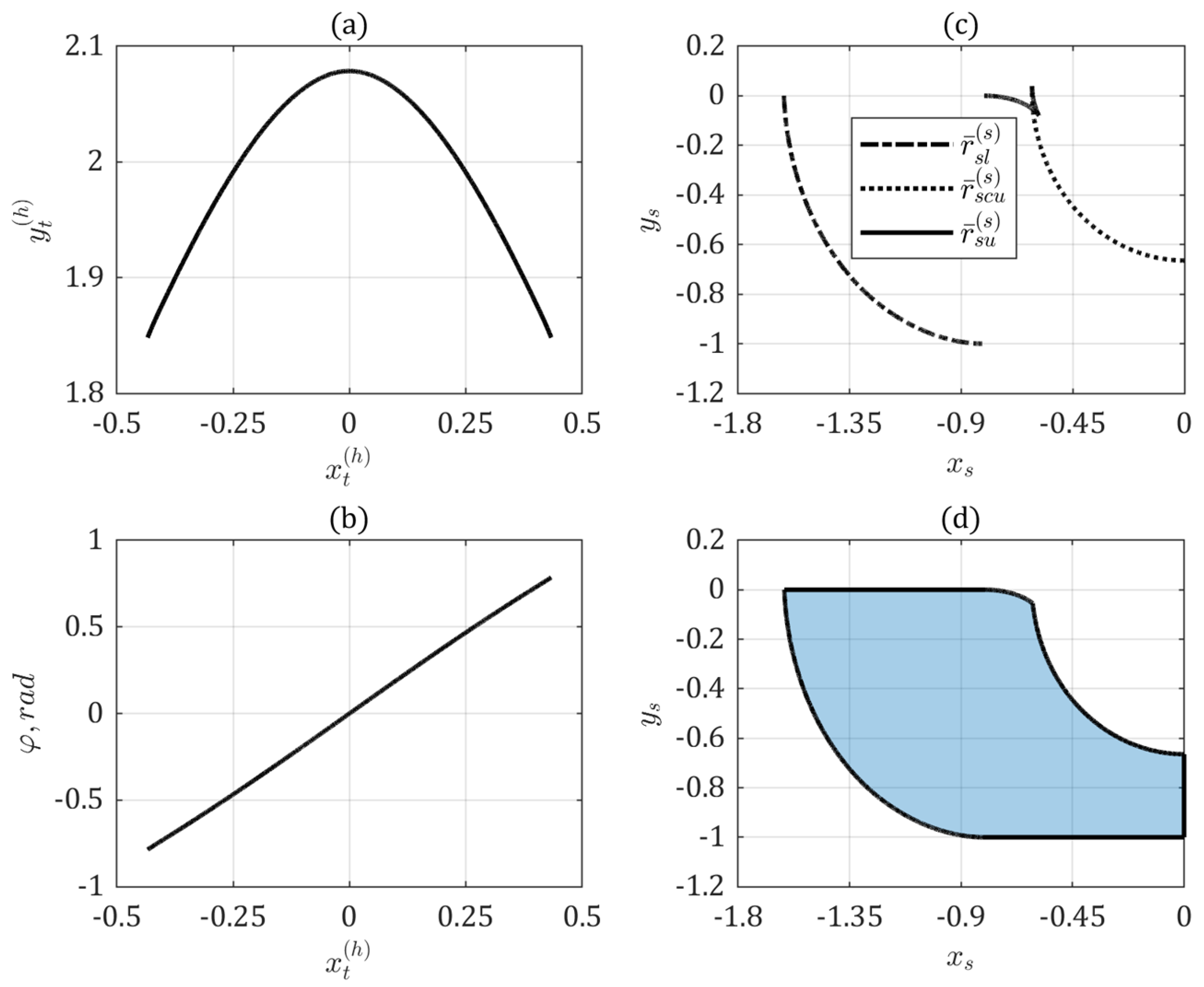
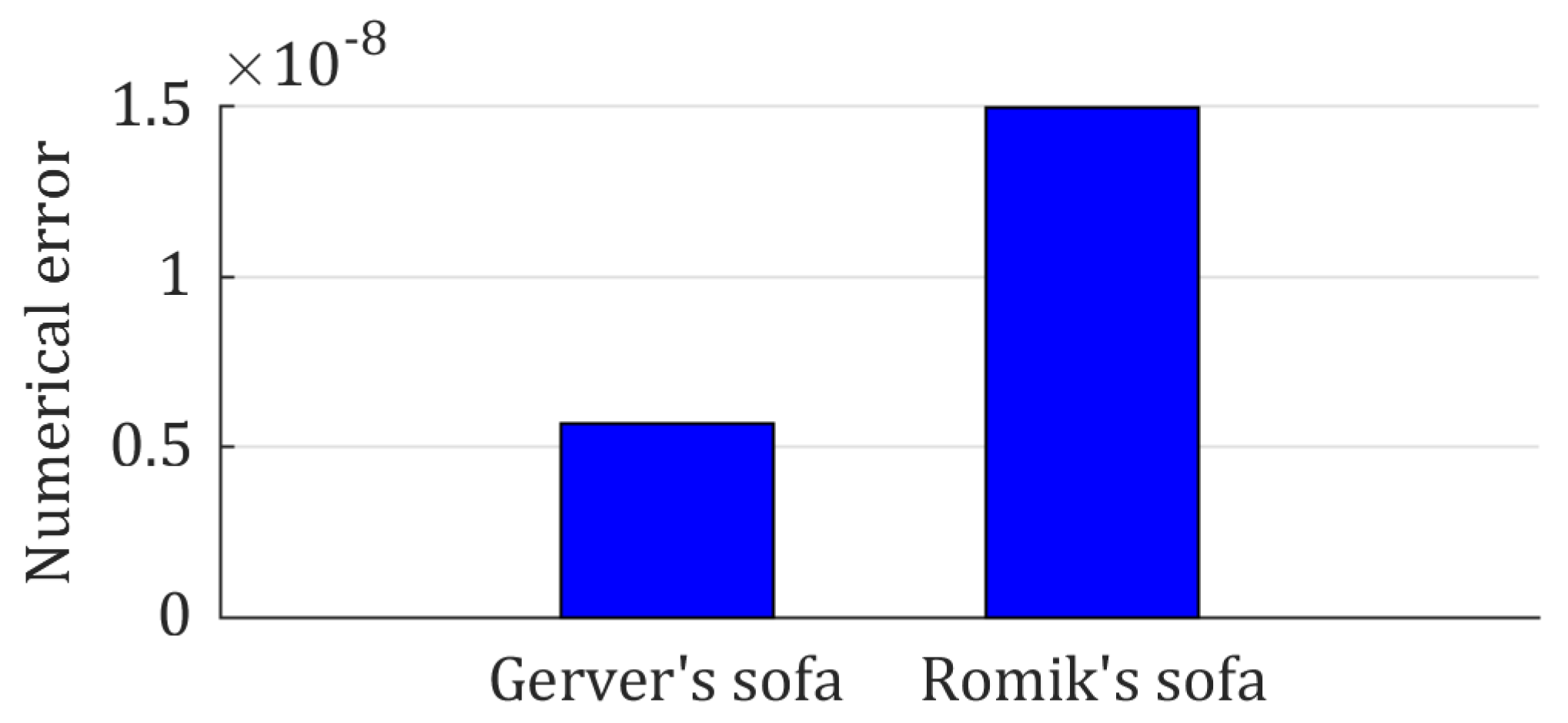
3.1. Gerver’s Solution
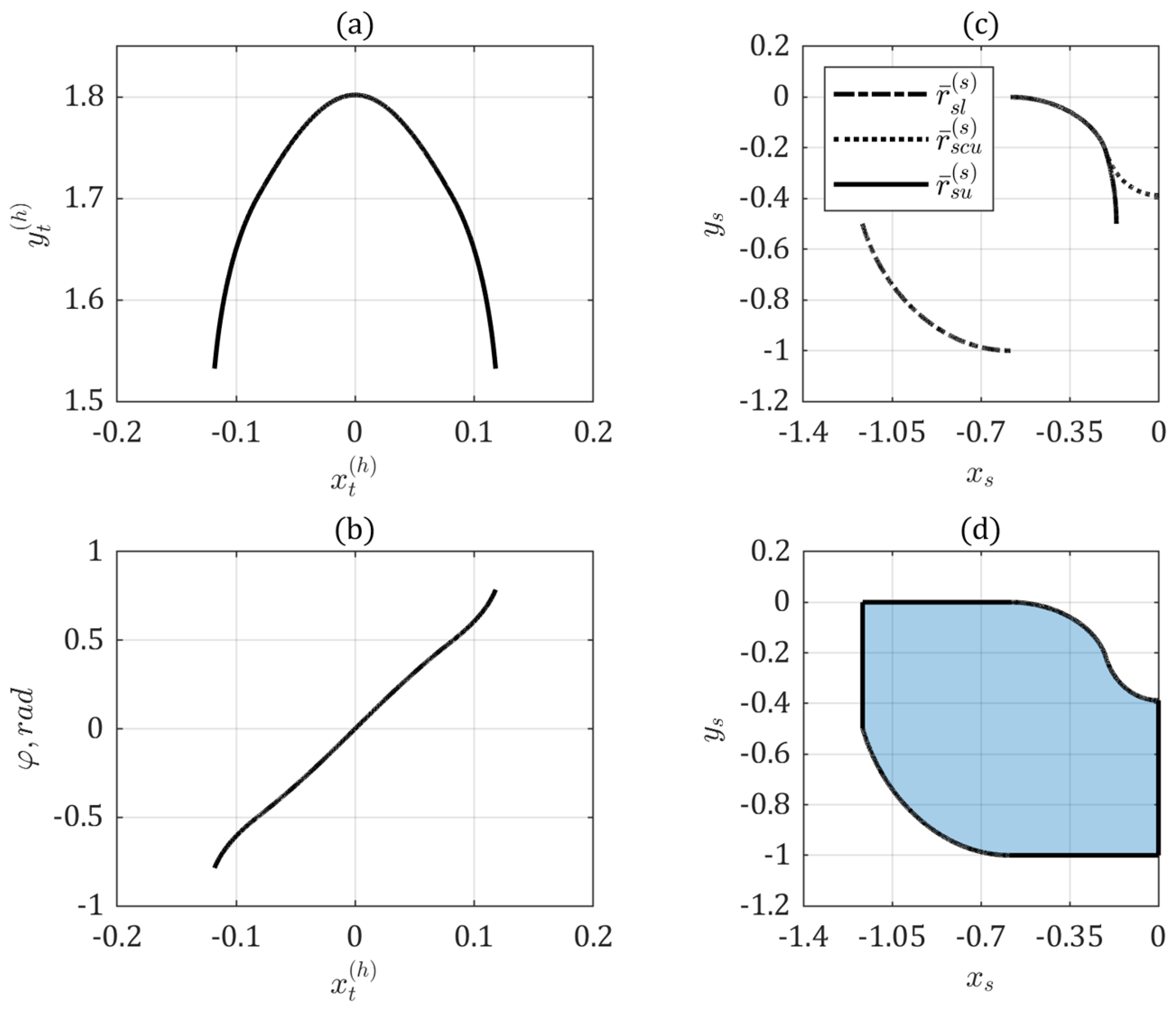
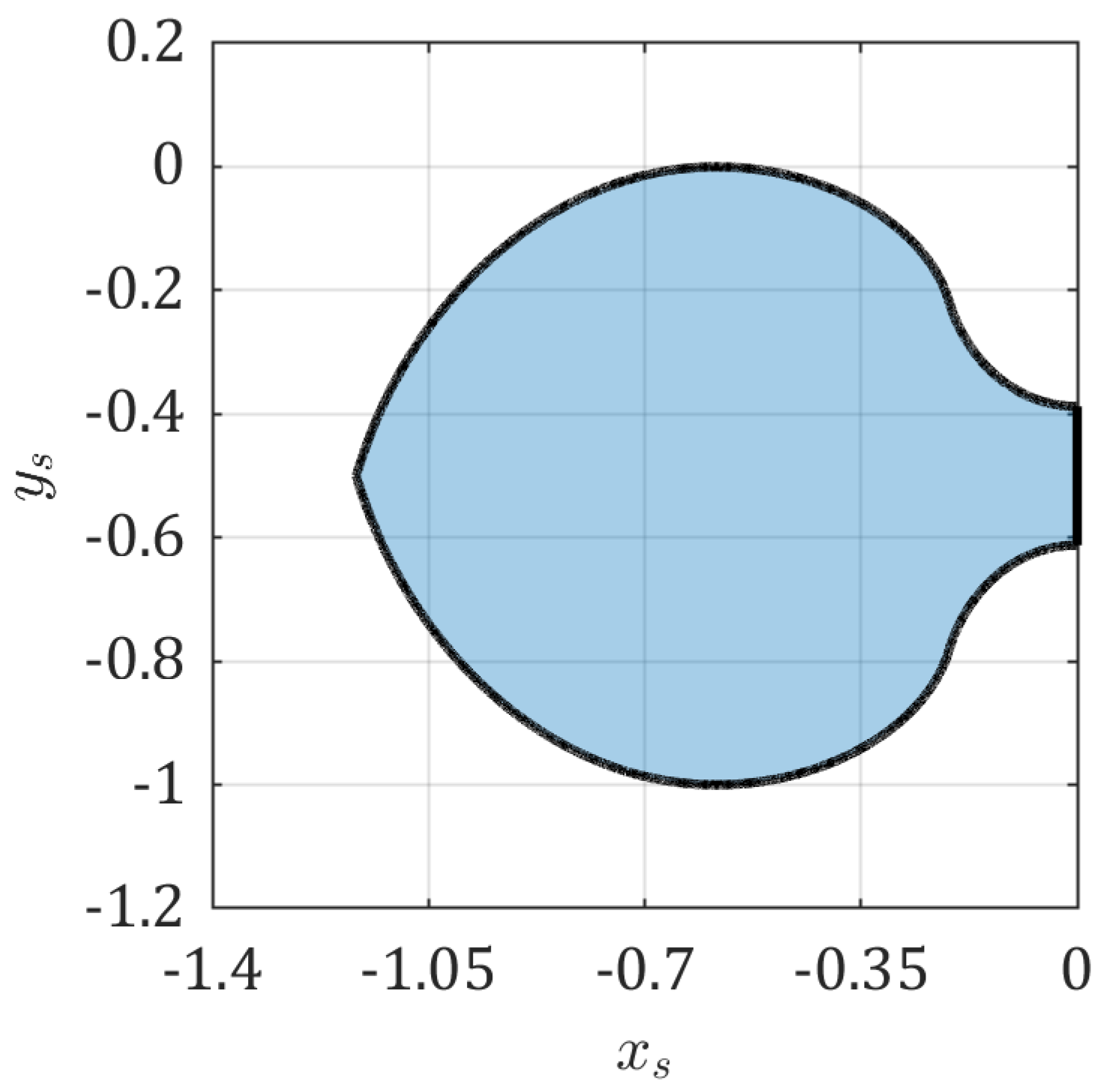
3.2. Romik’s Solution
3.3. Asymmetrical Sofa
4. Conclusions
Funding
Institutional Review Board Statement
Conflicts of Interest
Appendix A. Auxiliary Theorems
References
- Moser, L. Moving furniture through a hallway. SIAM Rev. 1966, 8, 381. [Google Scholar] [CrossRef]
- Croft, H.T.; Falconer, K.; Guy, R.K. Unsolved Problems in Geometry: Unsolved Problems in Intuitive Mathematics; Springer Science & Business Media: Berlin, Germany, 2012; Volume 2. [Google Scholar]
- Hammersley, J.M. On the enfeeblement of mathematical skills by modern mathematics and by similar soft intellectual trash in schools and universities. Educ. Stud. Math. 1968, 1, 17. [Google Scholar] [CrossRef][Green Version]
- Gerver, J.L. On Moving a Sofa Around a Corner. Geom. Dedicata 1992, 42, 267–283. [Google Scholar] [CrossRef]
- Wagner, N.R. The sofa problem. Am. Math. Mon. 1976, 83, 188–189. [Google Scholar] [CrossRef]
- Maruyama, K. An approximation method for solving the sofa problem. Int. J. Comput. Inf. Sci. 1973, 2, 29–48. [Google Scholar] [CrossRef][Green Version]
- Gibbs, P. A Computational Study of Sofas and Cars. Comput. Sci. 2014, 2, 1–5. [Google Scholar]
- Kallus, Y.; Romik, D. Improved upper bounds in the moving sofa problem. Adv. Math. 2018, 340, 960–982. [Google Scholar] [CrossRef]
- Song, N. A Variational Approach to the Moving Sofa Problem; Senior Project; Bard College: Annandale-On-Hudson, NY, USA, 2016. [Google Scholar]
- Gerd, E.; Henrik, E.; Kimmo, E. Moving a food trolley around a corner. Theor. Comput. Sci. 1998, 191, 193–203. [Google Scholar] [CrossRef][Green Version]
- Wilson, D.; Davenport, J.H.; England, M.; Bradford, R. A “piano movers” problem reformulated. In Proceedings of the 2013 15th International Symposium on Symbolic and Numeric Algorithms for Scientific Computing, Timisoara, Romania, 23–26 September 2013; pp. 53–60. [Google Scholar]
- Schwartz, J.T.; Sharir, M. On the “piano movers” problem I. The case of a two-dimensional rigid polygonal body moving amidst polygonal barriers. Commun. Pure Appl. Math. 1983, 36, 345–398. [Google Scholar] [CrossRef]
- Maddila, S.; Yap, C.K. Moving a polygon around the corner in a corridor. In Proceedings of the Second Annual Symposium on Computational Geometry, Yorktown Heights, NY, USA, 2–4 June 1986; pp. 187–192. [Google Scholar]
- Litvin, F.L.; Fuentes, A. Gear Geometry and Applied Theory; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar] [CrossRef]
- Batsch, M. A novel method of obtaining honing tool profile for machining gears with profile modifications. J. Manuf. Sci. Eng. 2020, 142, 091004. [Google Scholar] [CrossRef]
- Polowniak, P.; Sobolak, M.; Marciniec, A. Mathematical model of the worm wheel tooth flank of a double-enveloping worm gear. Alex. Eng. J. 2021, 60, 3037–3046. [Google Scholar] [CrossRef]
- Romik, D. Differential Equations and Exact Solutions in the Moving Sofa Problem. Exp. Math. 2018, 27, 316–330. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Batsch, M. A Numerical Approach for Analysing the Moving Sofa Problem. Symmetry 2022, 14, 1409. https://doi.org/10.3390/sym14071409
Batsch M. A Numerical Approach for Analysing the Moving Sofa Problem. Symmetry. 2022; 14(7):1409. https://doi.org/10.3390/sym14071409
Chicago/Turabian StyleBatsch, Michał. 2022. "A Numerical Approach for Analysing the Moving Sofa Problem" Symmetry 14, no. 7: 1409. https://doi.org/10.3390/sym14071409
APA StyleBatsch, M. (2022). A Numerical Approach for Analysing the Moving Sofa Problem. Symmetry, 14(7), 1409. https://doi.org/10.3390/sym14071409