
An Autonomous Storage Optimization LRM Generation Strategy Based on Cascaded NURBS

 ,
,
Abstract
:1. Introduction
- Lane lines are analyzed by using the fractal geometry theory to obtain the recursive definition of a lane line. A recursive feedback system is constructed based on the idea of dynamic programming, and its convergence is proved theoretically, which provides a theoretical basis for developing the autonomous storage optimization LRM generation strategy based on the cascaded NURBS.
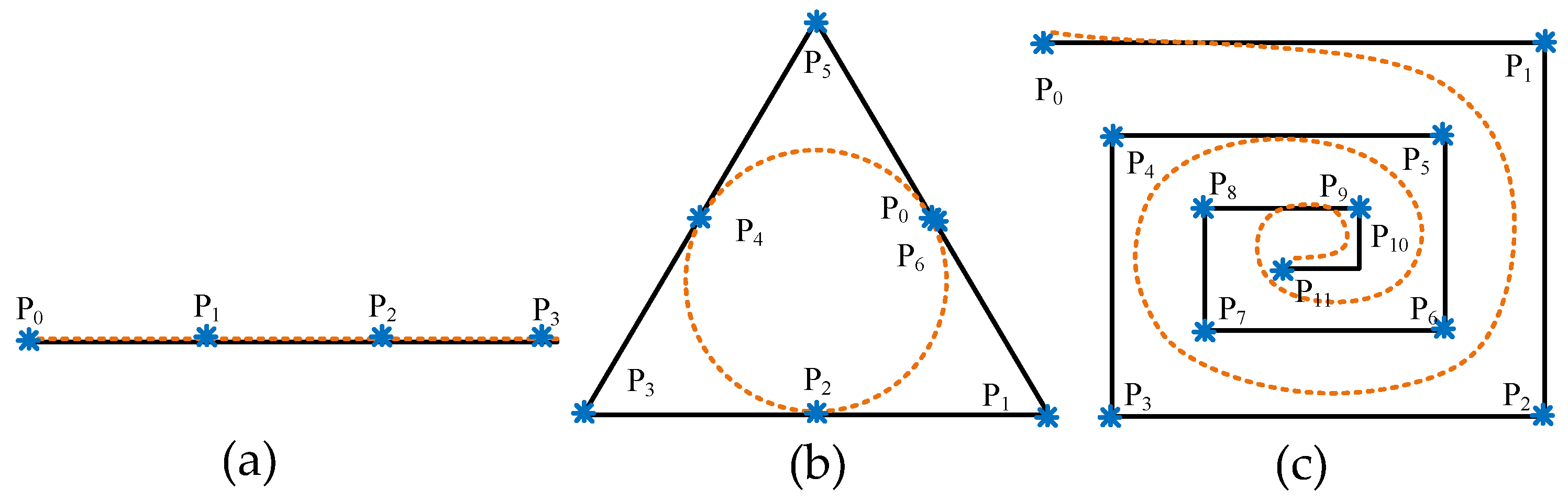
- A random shape-dividing algorithm is designed for lane lines to recognize and segment the obtained lane lines and divide the lane line data set into a meta lane line set.
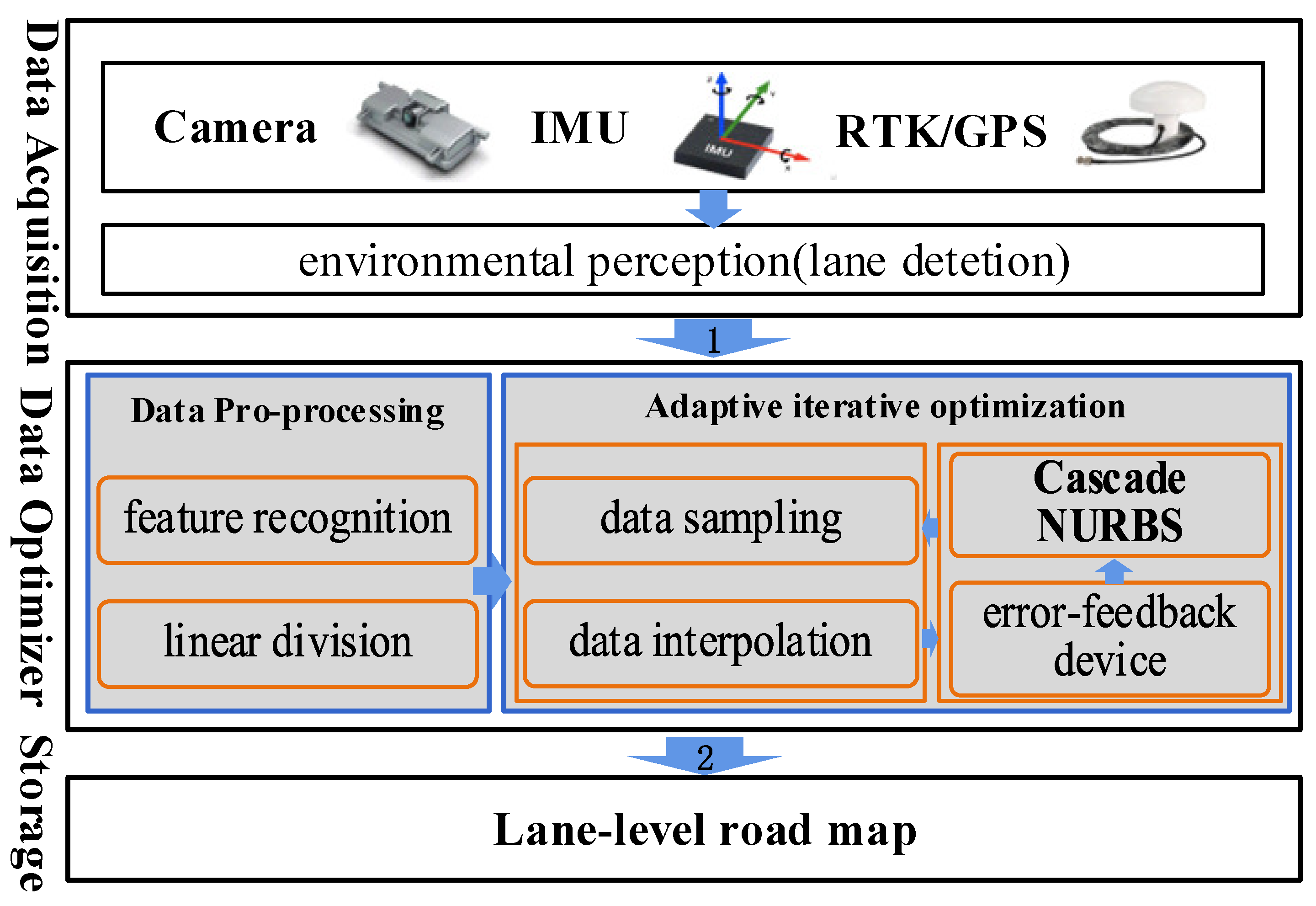
- A memory self-learning strategy is devised based on the cascaded NURBS. This strategy dictates that the input data density is adjusted adaptively and iteratively according to the fitting deviation of the NURBS curve, which reduces the data storage requirements of the lane lines.
- An accurate adaptive dynamic memory curve representation method is developed based on the cascaded NURBS. This method only requires a small data storage volume to ensure that the lane line fitting error meets the requirement.
2. Background and Motivation
2.1. Background
2.2. Motivation
3. Model and Methods
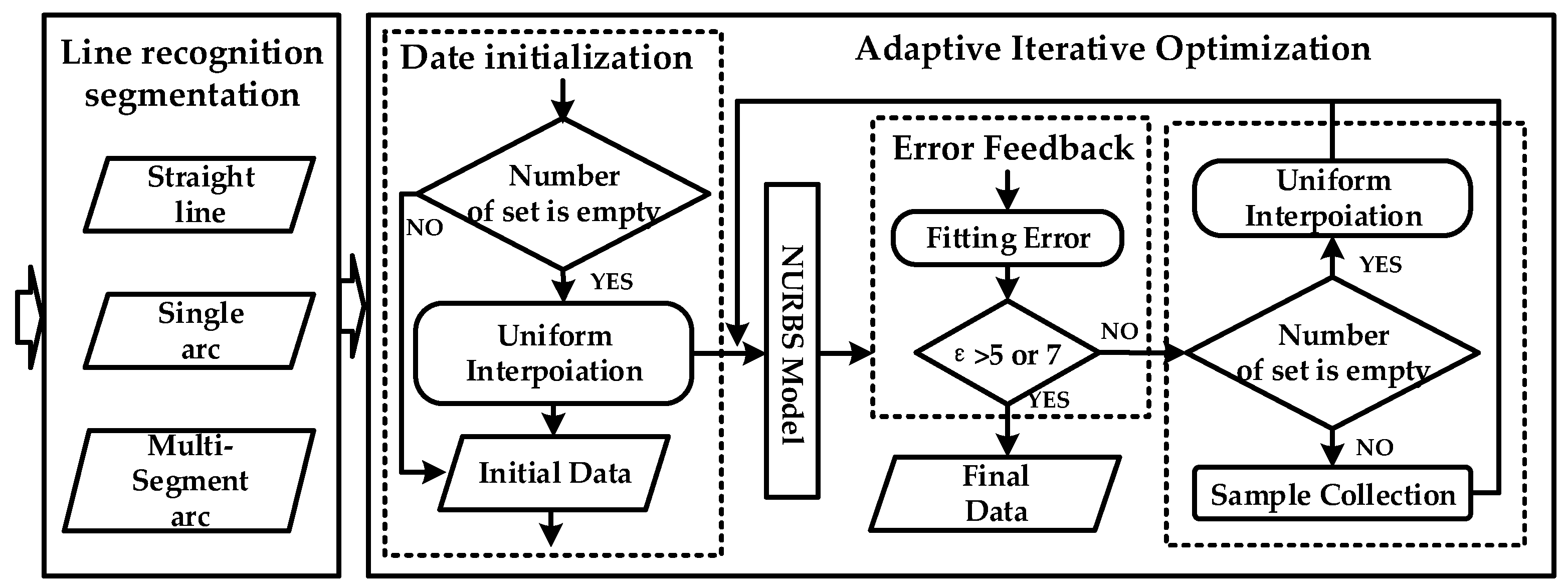
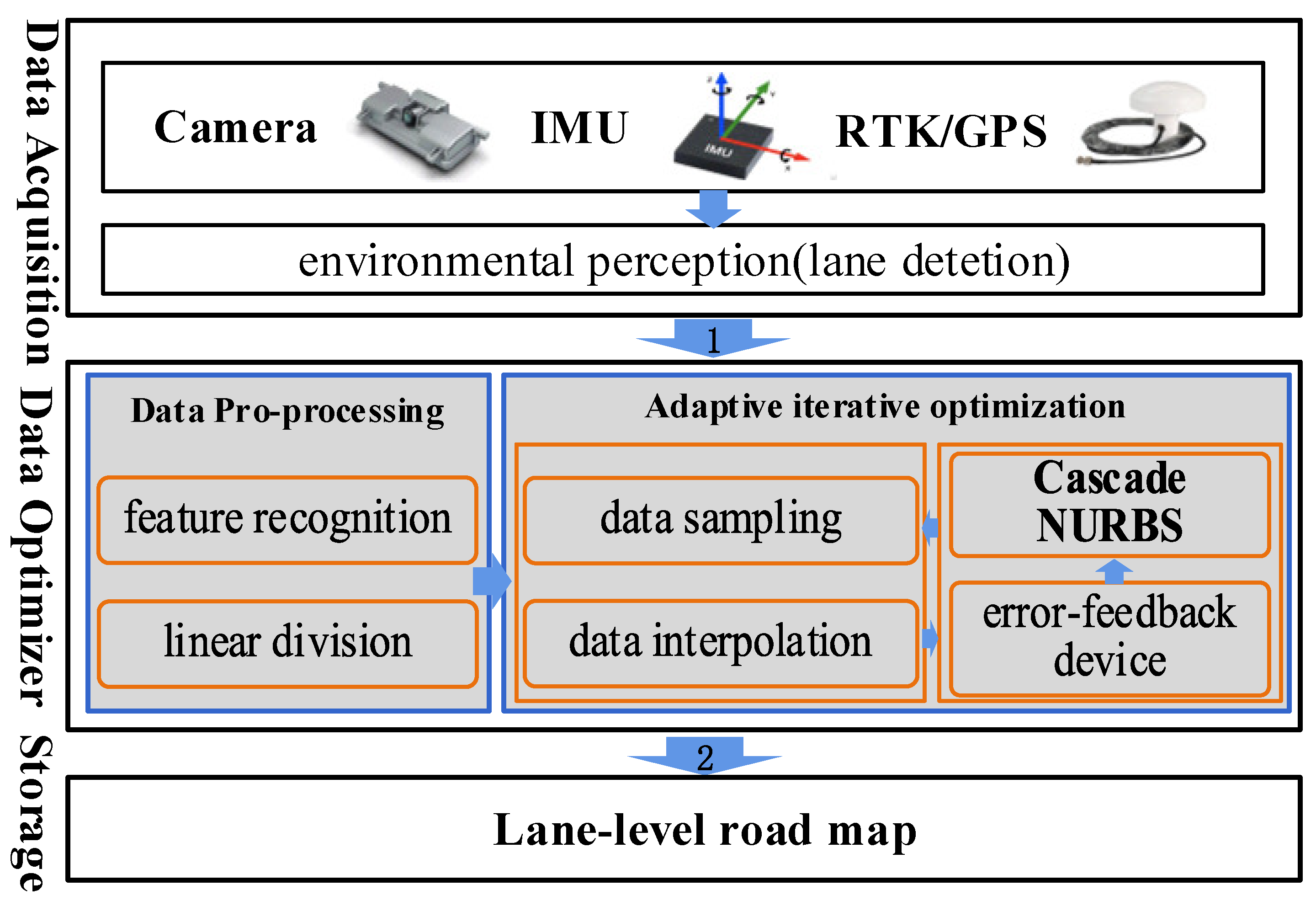
3.1. Overview
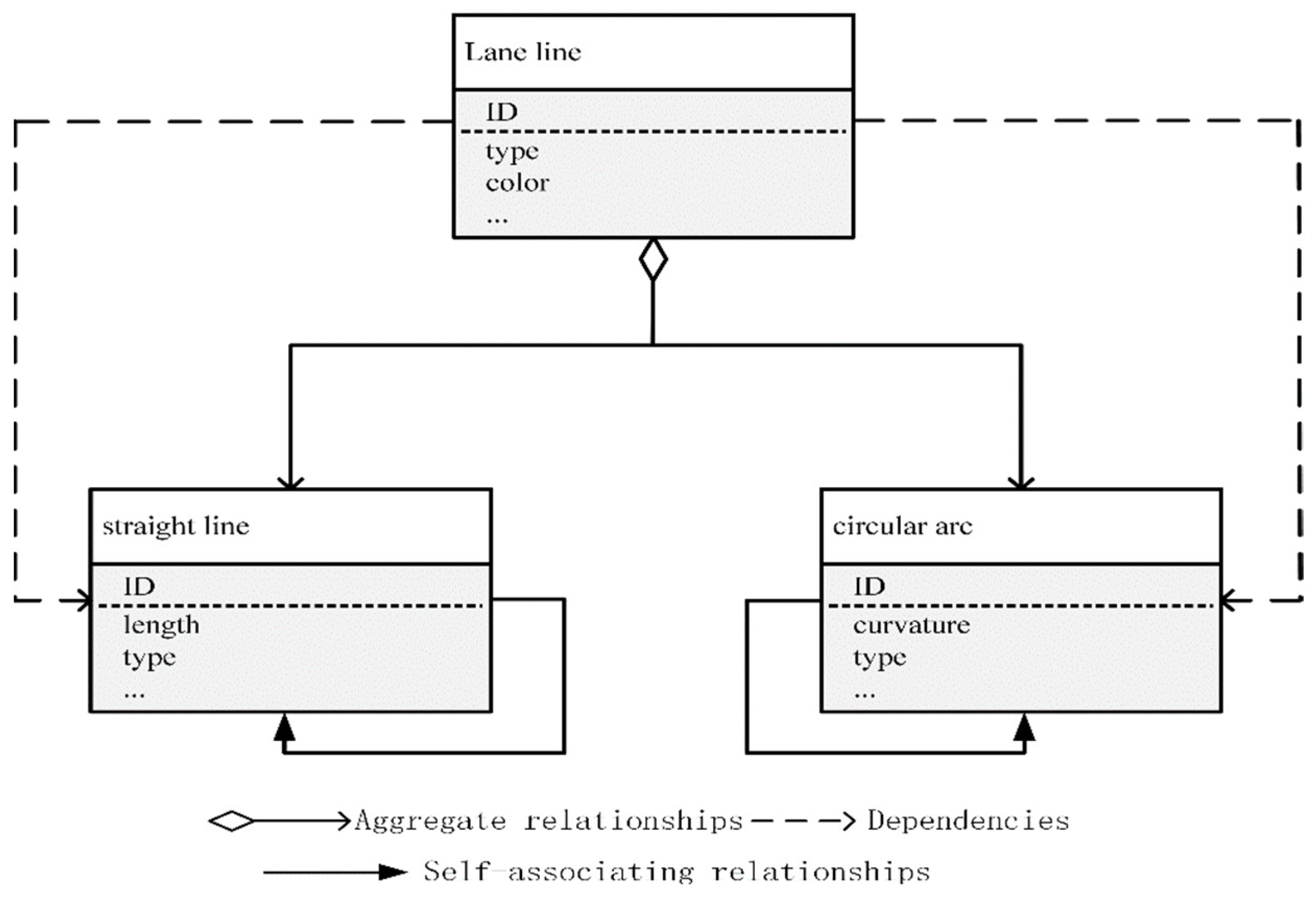
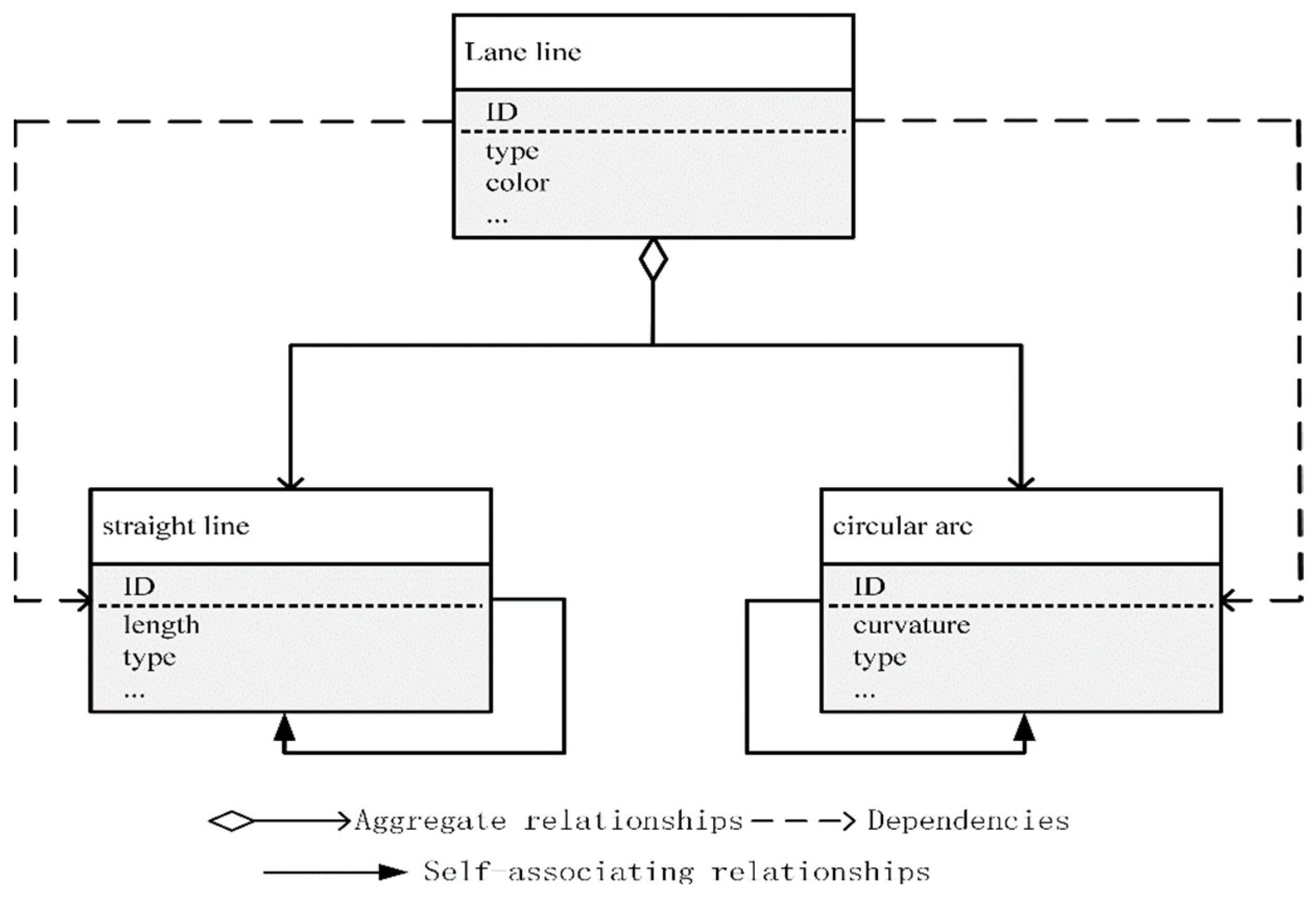
3.2. Lane Line Storage Model
3.2.1. Recursive Definition of Lane Line
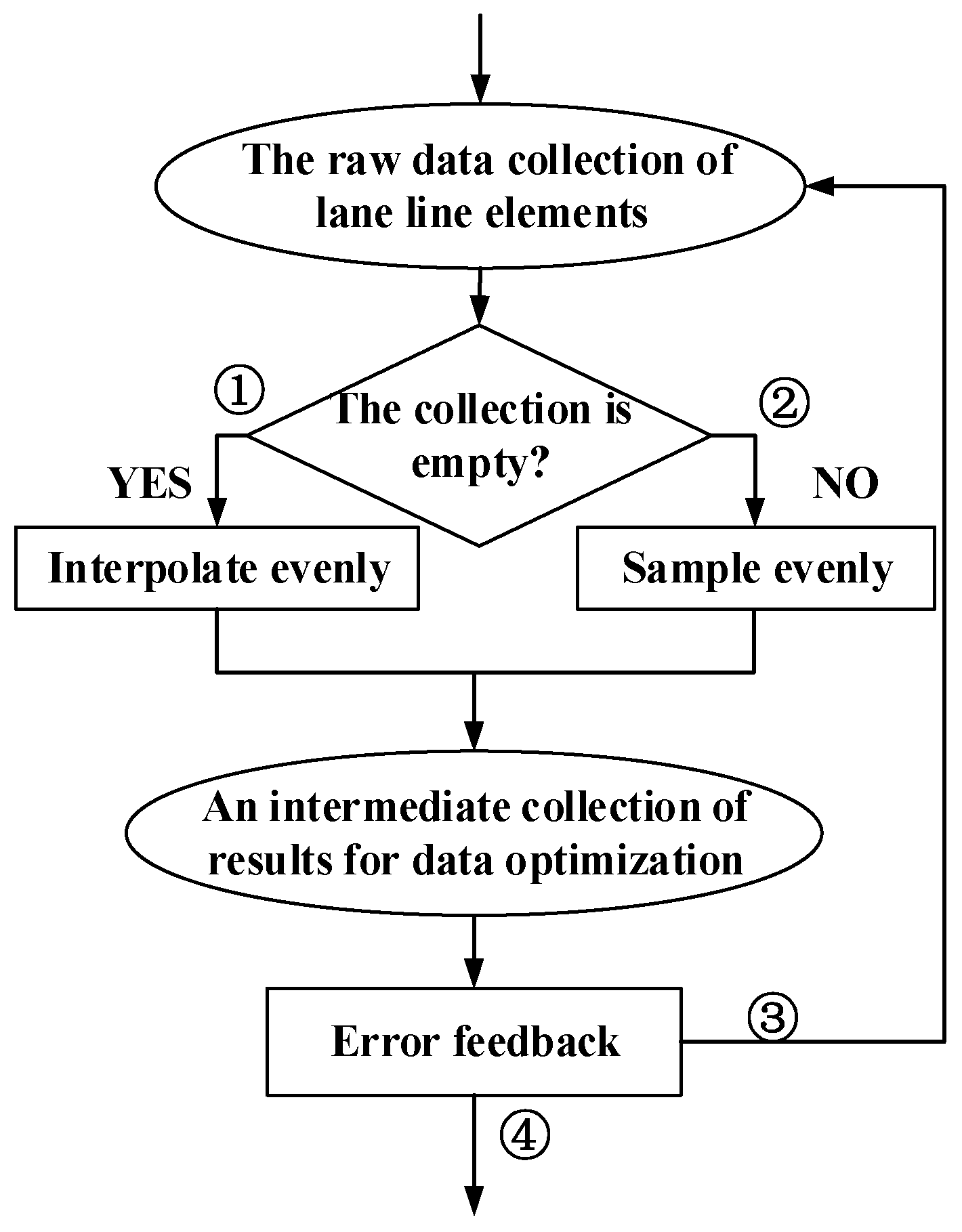
3.2.2. Modeling of Recursive Feedback System
- When , ;
- When , , and ;
- When , , and ;
3.3. Autonomous LRM Storage Optimization Method Based on Cascaded NURBS
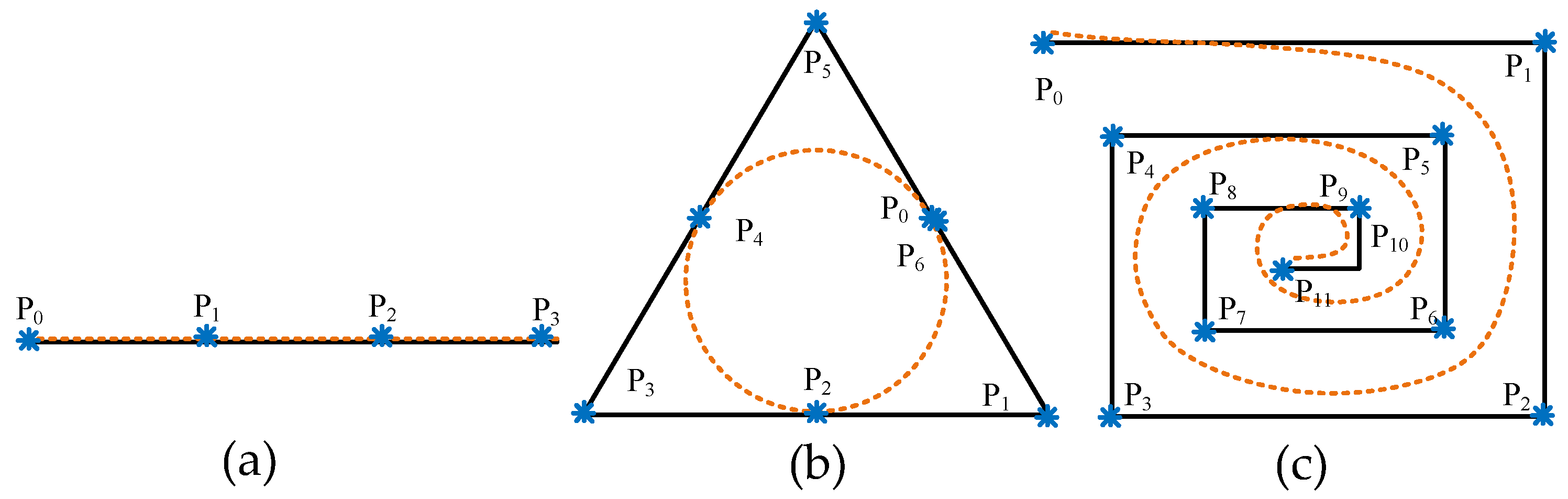
3.3.1. Random Shape-Dividing Algorithm of Lane Lines
| Algorithm 1 Lane Line Ungauged Fractal Algorithm |
| Input: D, Rmax |
| Output: map |
| 1. for (i = 1; i < size(D); i++) do |
| 2. [Ci, ri] = point2circle(di); |
| 3. if (ri > Rmax) then |
| 4. map(j).type = ‘linear’; map(j).data = [Ci,ri]; |
| 5. else |
| 6. map(j).type = ‘circle’; map(j).data = [Ci,ri]; |
| 7. if (map(j).data > 1) then |
| 8. dis = sqrt(pow(x − Ci.x)+ pow(y − Ci.y)); |
| 9. end |
| 10. if (dis > pow(ri)) then |
| 11. map(j).type = ‘mulcircular’; |
| 12. end |
| 13. if (the type is different) then |
| 14. j = j + 1; |
| 15. end |
| 16. end |
| 17. end |
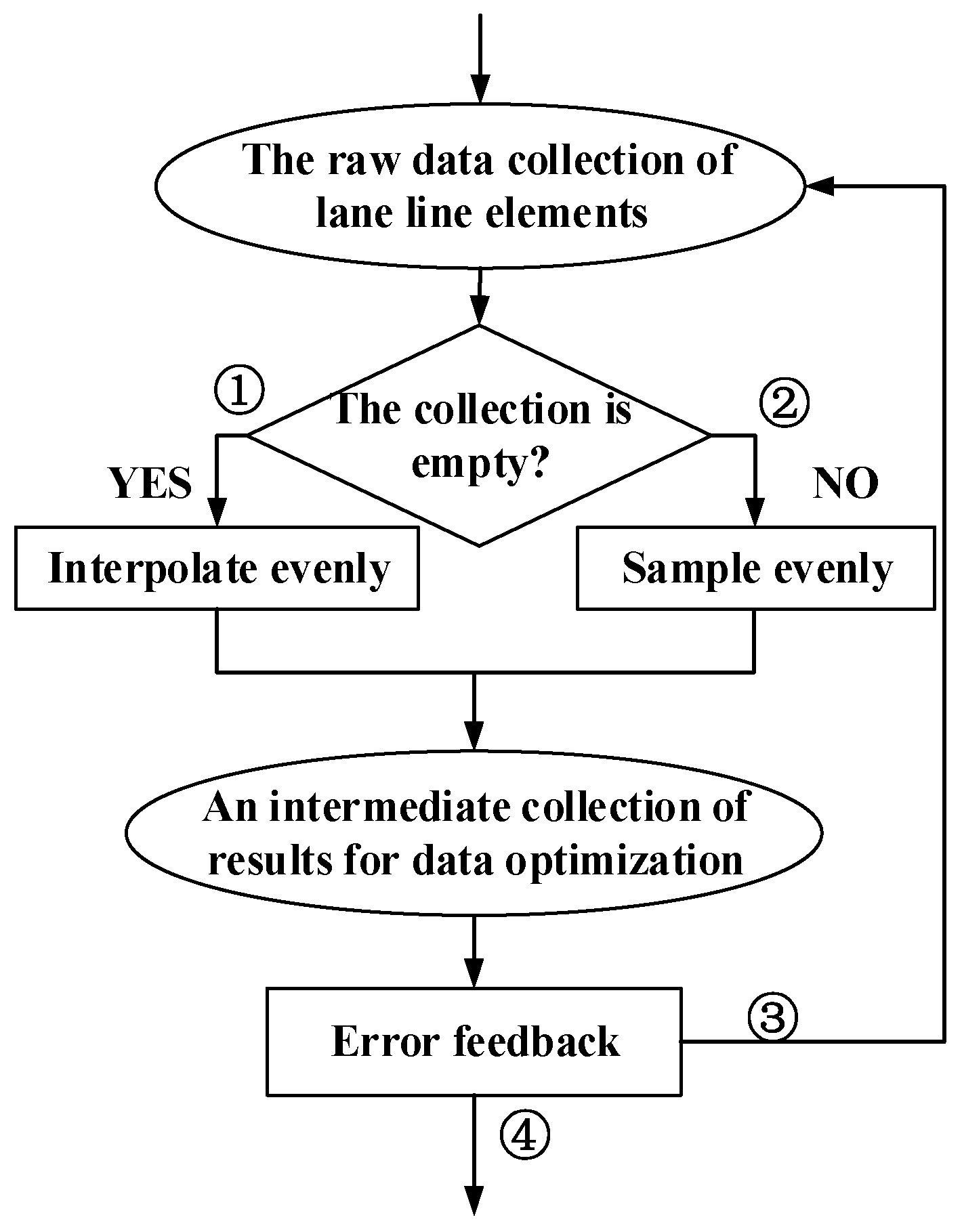
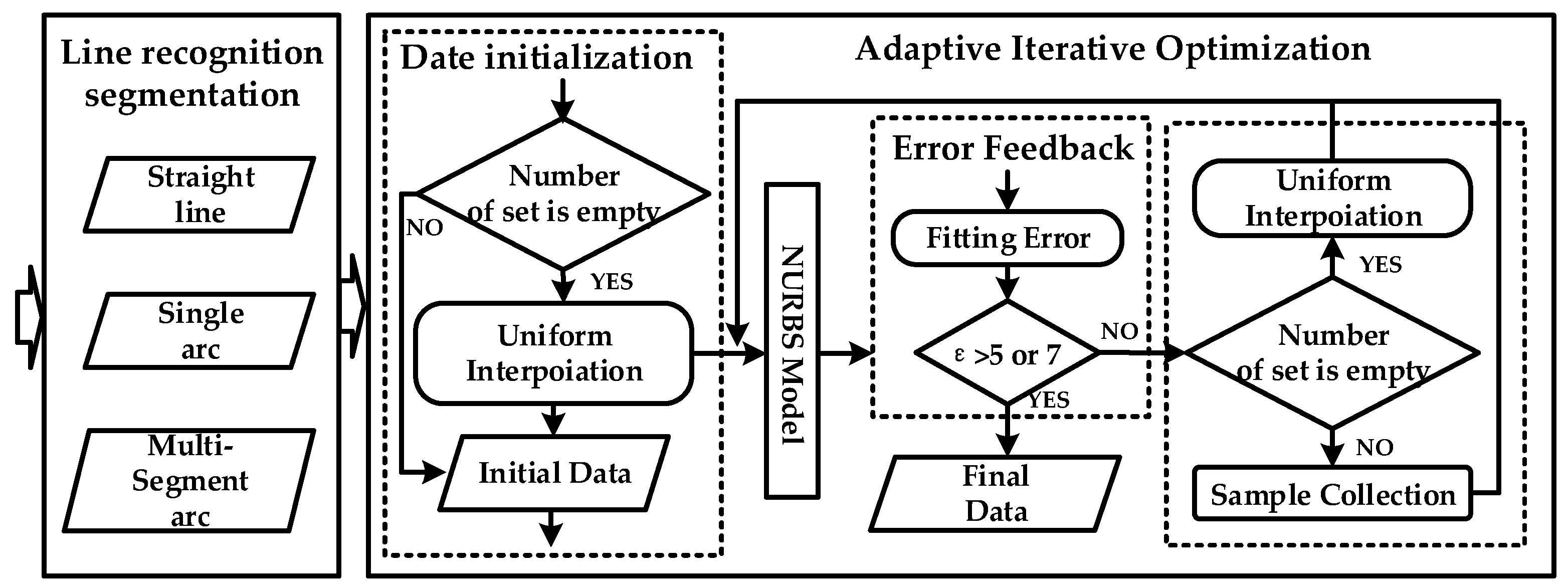
3.3.2. Error Feedback LRM Storage Self-Optimization Method Based on Cascaded NURBS
4. Experiment and Discussion
4.1. Setup and Implementation of Experiment
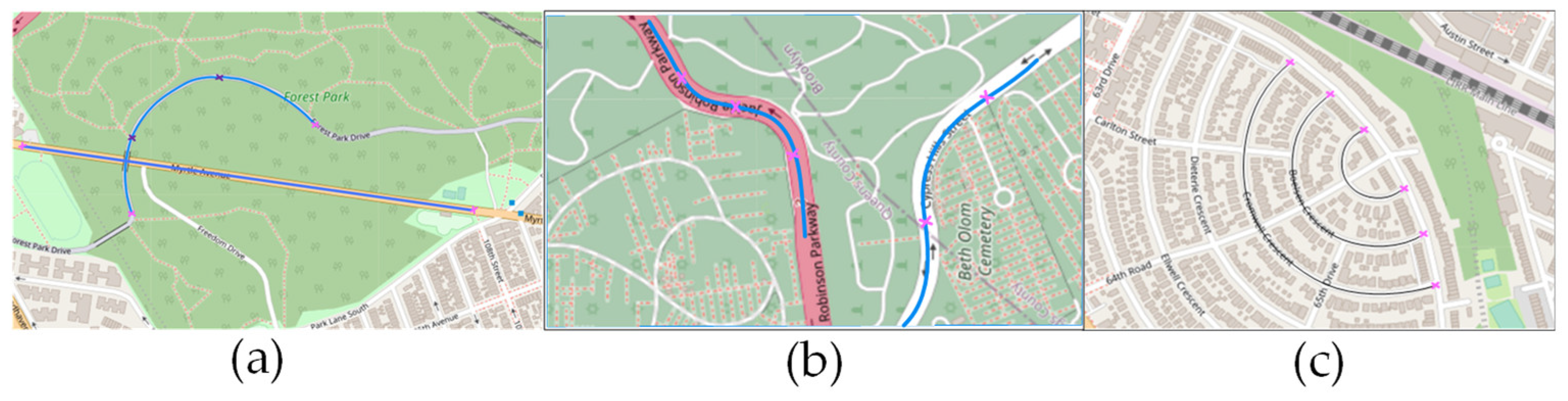
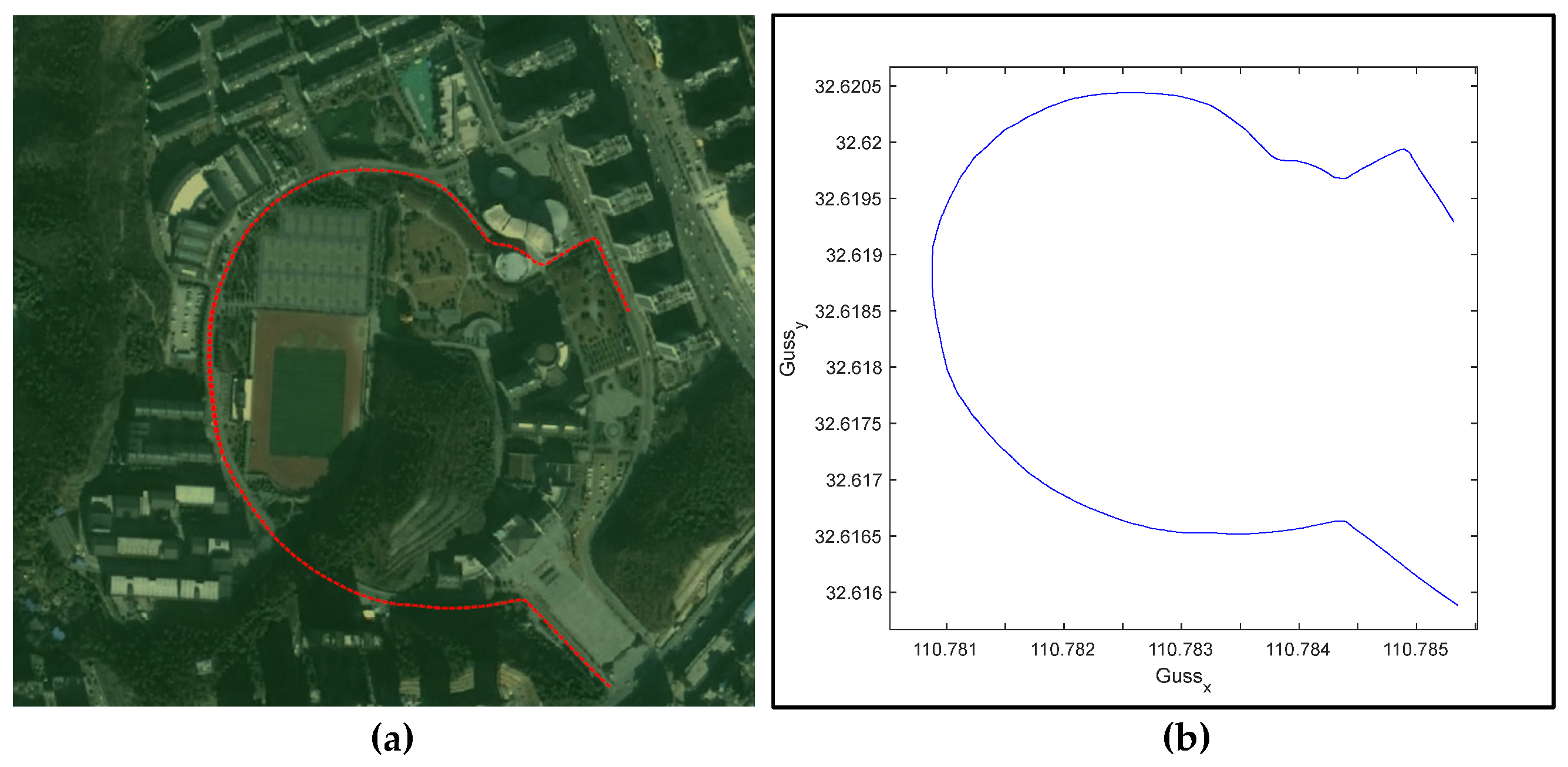
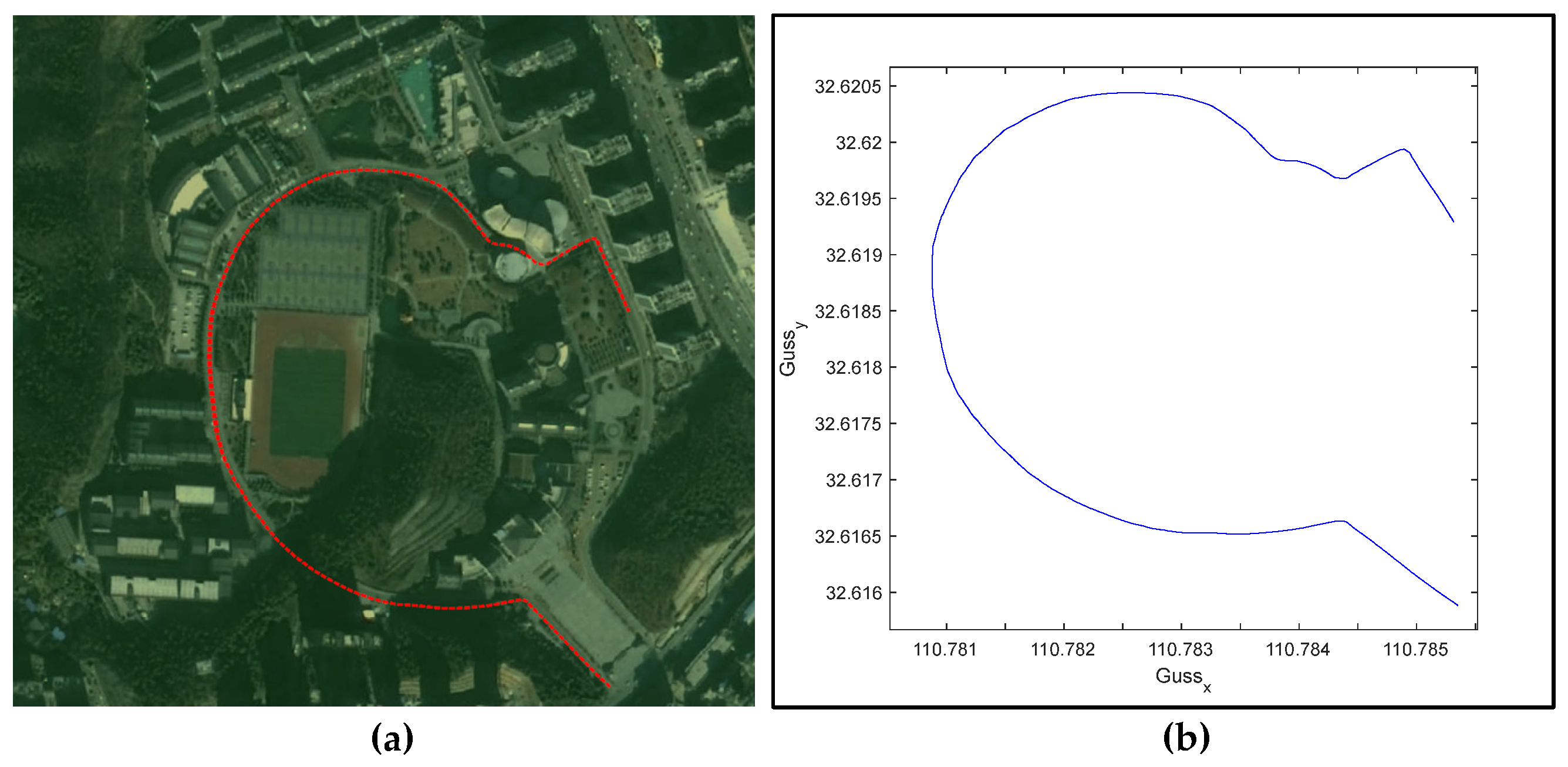
4.2. Data Acquisition and Processing
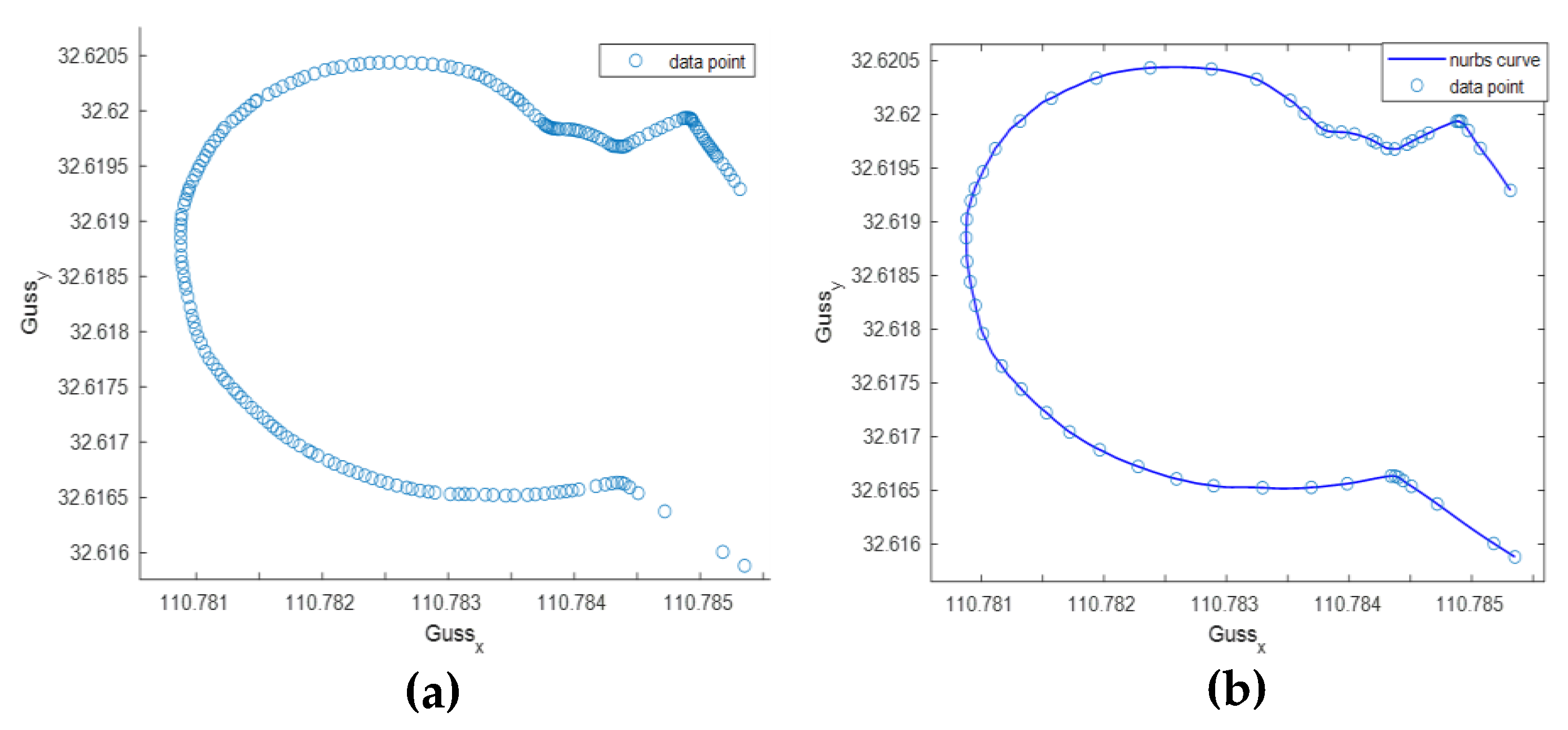
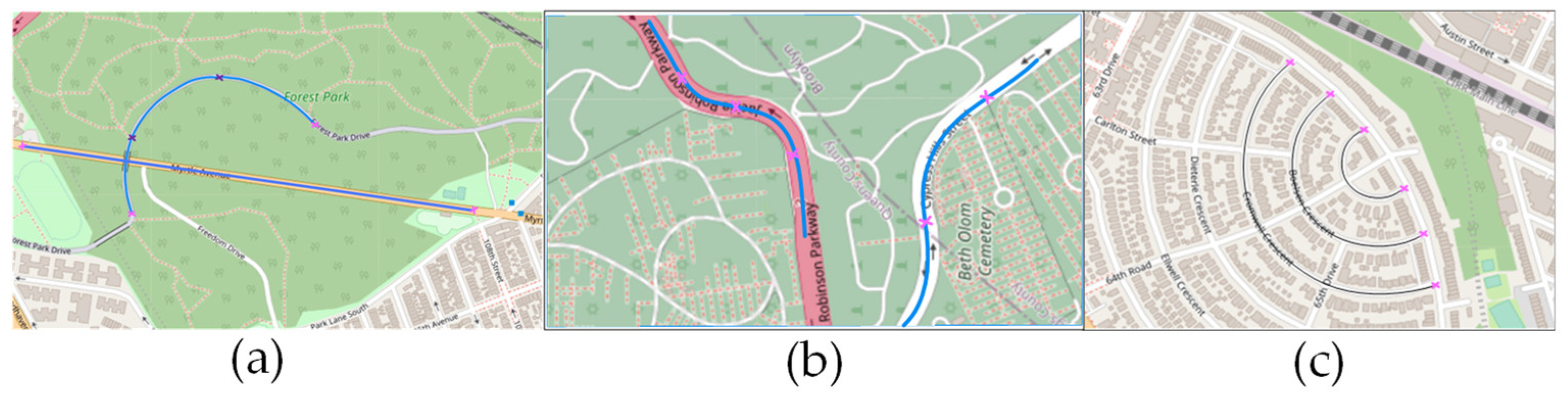
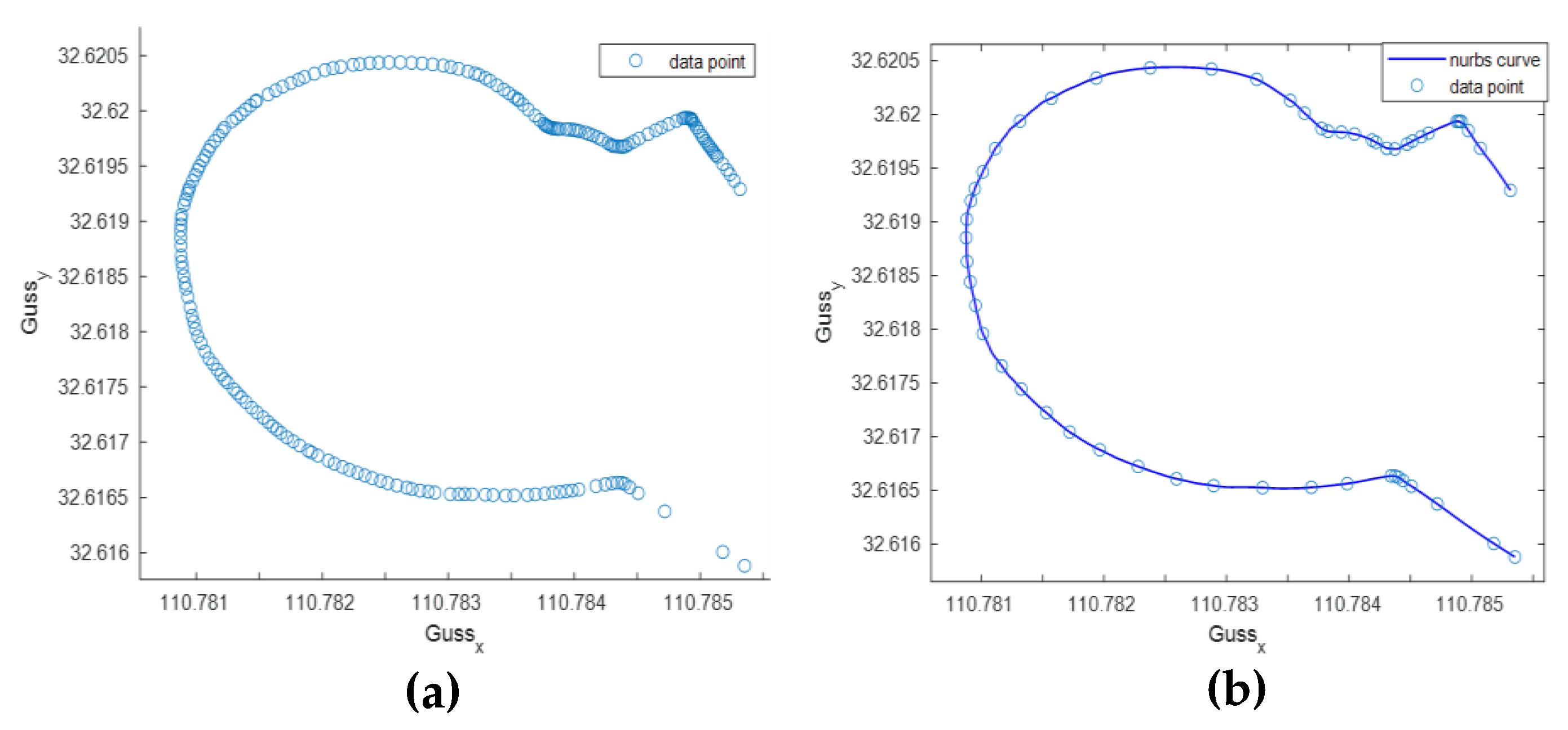
4.3. Lane Model
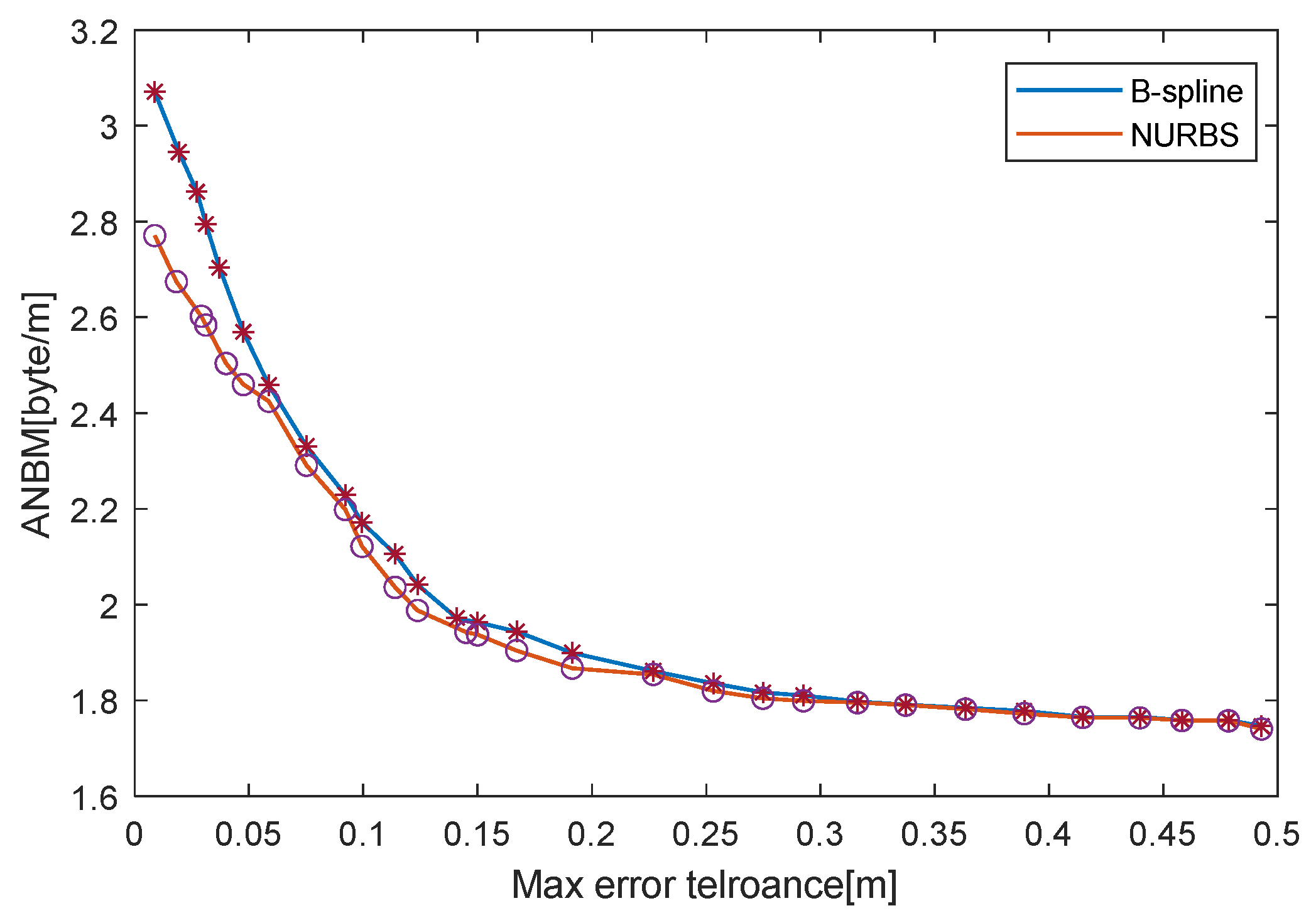
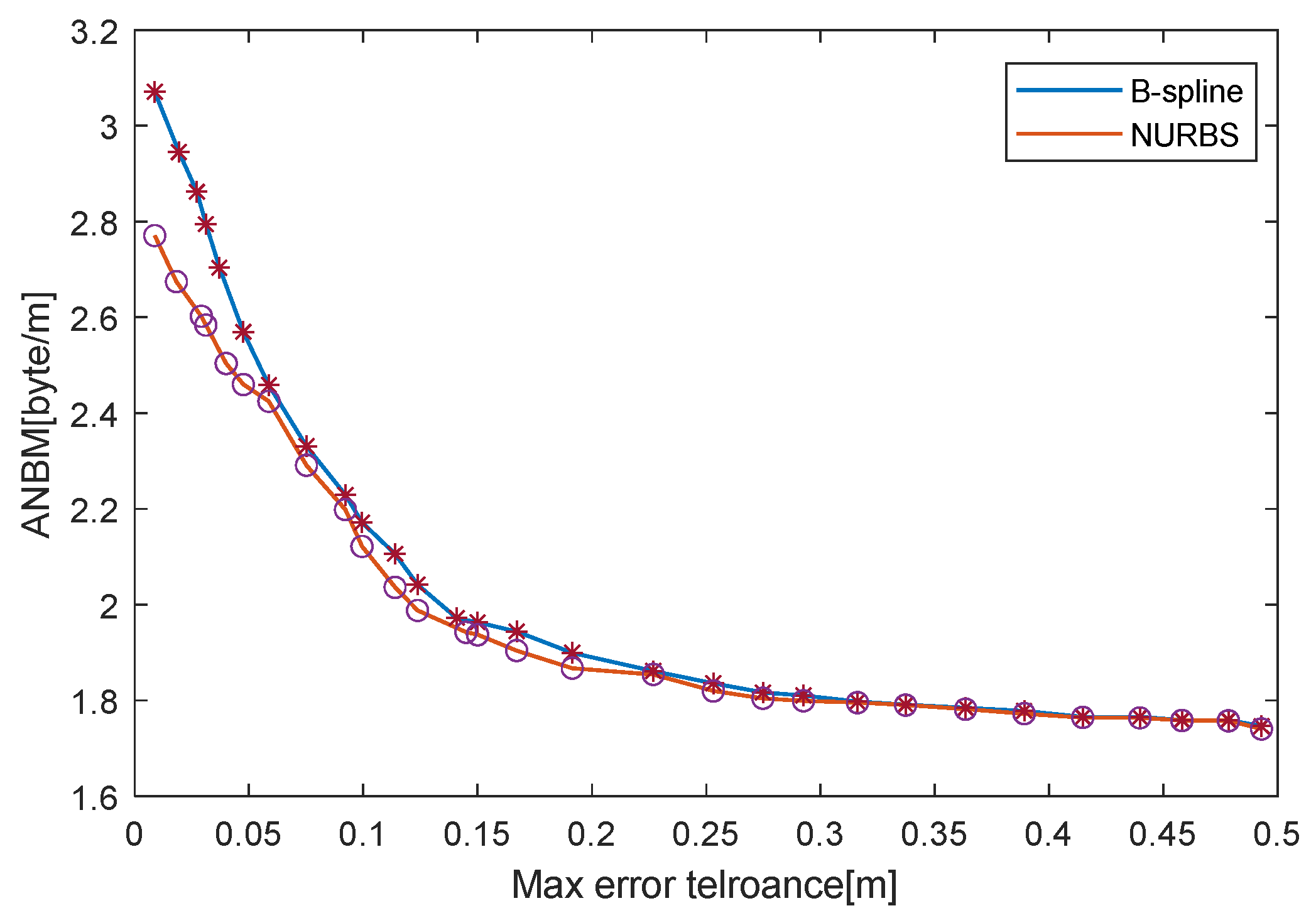
- Memory Efficiency
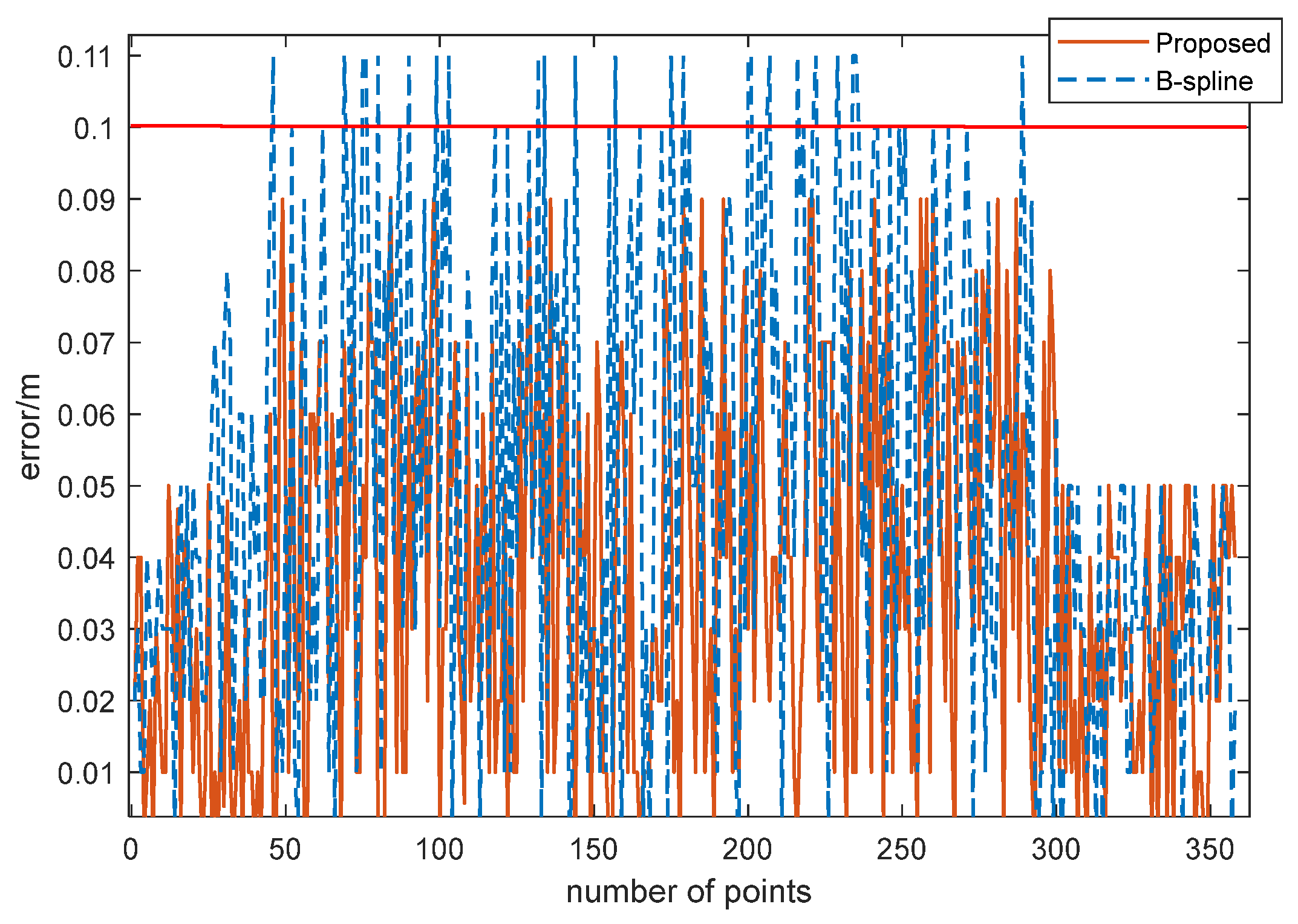
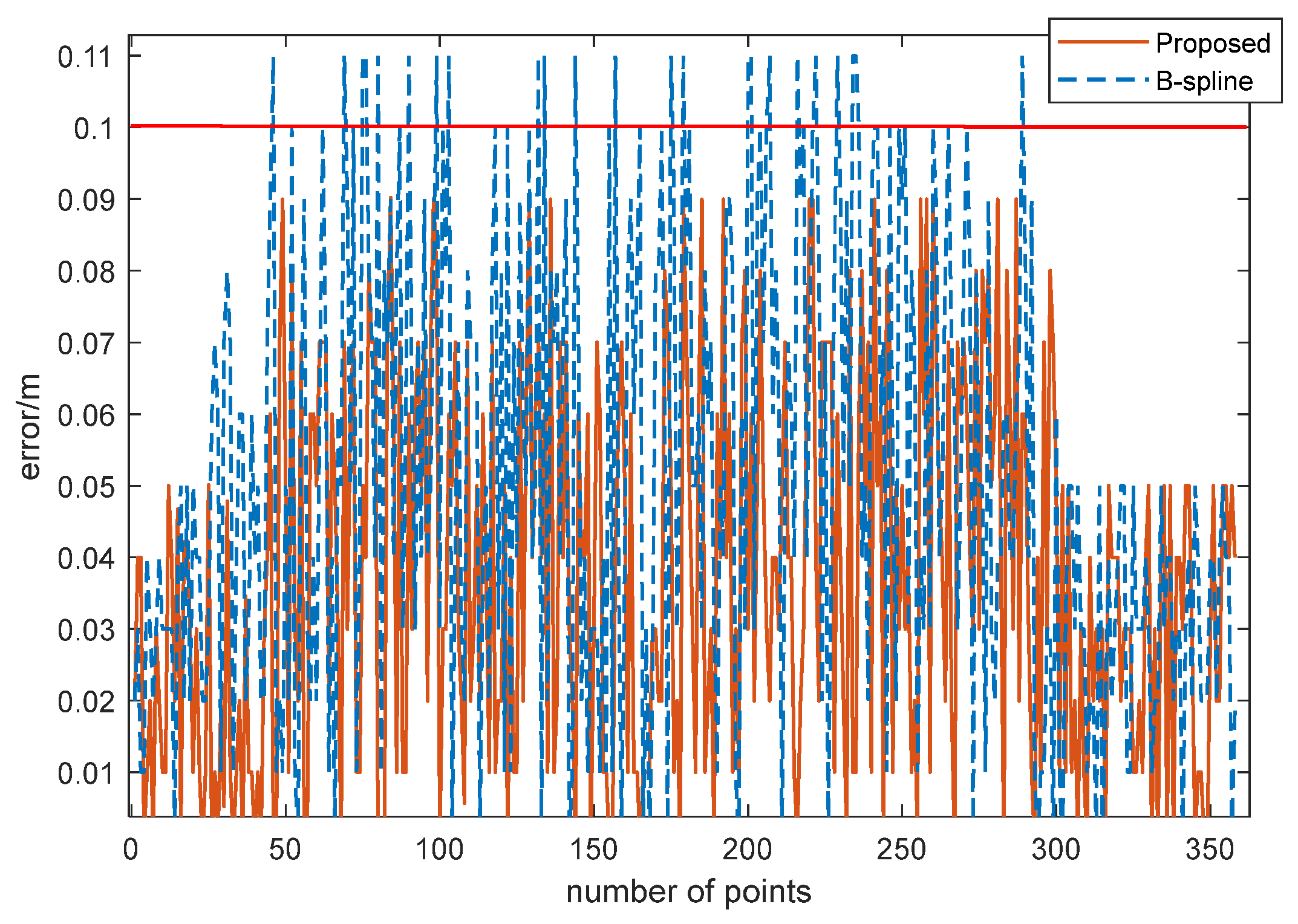
- Accuracy
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, D.; Chung, T.; Yi, K. Lane map building and localization for automated driving using 2D laser rangefinder. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 680–685. [Google Scholar]
- Gwon, G.-P.; Hur, W.-S.; Kim, S.-W.; Seo, S.-W. Generation of a Precise and Efficient Lane-Level Road Map for Intelligent Vehicle Systems. IEEE Trans. Veh. Technol. 2016, 66, 4517–4533. [Google Scholar] [CrossRef]
- Yu, Z.; Zhu, H.; Lin, L.; Liang, H.; Yu, B.; Huang, W. Laser Data Based Automatic Generation of Lane-Level Road Map for Intelligent Vehicles. arXiv 2020, arXiv:2101.05066. [Google Scholar]
- Stannartz, N.; Theers, M.; Llarena, A.; Sons, M.; Kuhn, M.; Bertram, T. Comparison of Curve Representations for Memory-Efficient and High-Precision Map Generation. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Vatavu, A.; Danescu, R.; Nedevschi, S. Environment perception using dynamic polylines and particle based occupancy grids. In Proceedings of the 2011 IEEE 7th International Conference on Intelligent Computer Communication and Processing, Cluj-Napoca, Romania, 25–27 August 2011; IEEE: New York, NY, USA, 2011; pp. 239–244. [Google Scholar]
- Betaille, D.; Toledo-Moreo, R. Creating Enhanced Maps for Lane-Level Vehicle Navigation. IEEE Trans. Intell. Transp. Syst. 2010, 11, 786–798. [Google Scholar] [CrossRef]
- Schindler, A.; Maier, G.; Janda, F. Generation of high precision digital maps using circular arc splines. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium, Madrid, Spain, 3–7 June 2012; IEEE: New York, NY, USA, 2012; pp. 246–251. [Google Scholar]
- Jo, K.; Sunwoo, M. Generation of a Precise Roadway Map for Autonomous Cars. IEEE Trans. Intell. Transp. Syst. 2013, 15, 925–937. [Google Scholar] [CrossRef]
- Jo, K.; Lee, M.; Kim, C.; Sunwoo, M. Construction process of a three-dimensional roadway geometry map for autonomous driving. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2016, 231, 1414–1434. [Google Scholar] [CrossRef]
- Guo, C.; Kidono, K.; Meguro, J.; Kojima, Y.; Ogawa, M.; Naito, T. A Low-Cost Solution for Automatic Lane-Level Map Generation Using Conventional In-Car Sensors. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2355–2366. [Google Scholar] [CrossRef]
- Chen, A.; Ramanandan, A.; Farrell, J.A. High-precision lane-level road map building for vehicle navigation. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 1035–1042. [Google Scholar] [CrossRef]
- Brummer, S.; Janda, F.; Maier, G.; Schindler, A. Evaluation of a mapping strategy based on smooth arc splines for different road types. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; IEEE: New York, NY, USA, 2013; pp. 160–165. [Google Scholar]
- Barnea, S.; Filin, S. Segmentation of terrestrial laser scanning data using geometry and image information. ISPRS J. Photogramm. Remote Sens. 2013, 76, 33–48. [Google Scholar] [CrossRef]
- Meyer, A.; Walter, J.; Lauer, M. Fast Lane-Level Intersection Estimation using Markov Chain Monte Carlo Sampling and B-Spline Refinement. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 71–76. [Google Scholar] [CrossRef]
- Piegl, L.; Tiller, W. The NURBS Book; Springer: Berlin/Heidelberg, Germany, 1995. [Google Scholar]
- Reinoso, J.F.; Moncayo, M.; Ariza-López, F.J. A new iterative algorithm for creating a mean 3D axis of a road from a set of GNSS traces. Math. Comput. Simul. 2015, 118, 310–319. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Smoothness of Segmented Joints | Consistency | Fitting Precision | Memory Efficiency | Convenience/Stability of Modification | |
|---|---|---|---|---|---|
| Piecewise polynomial | ◇ | ○ | ◇ | ◇ | ◇ |
| Lines/Circular arcs | ○ | ○ | ◇ | ◇ | ○ |
| B-spline | □ | □ | ◇ | □ | □ |
| NURBS | □ | □ | □ | ◇ | □ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, S.; Zhou, K.; Yang, Y.; Zhang, Y.; Cao, K.; Liang, H.; Fu, Y. An Autonomous Storage Optimization LRM Generation Strategy Based on Cascaded NURBS. Symmetry 2022, 14, 1307. https://doi.org/10.3390/sym14071307
Ding S, Zhou K, Yang Y, Zhang Y, Cao K, Liang H, Fu Y. An Autonomous Storage Optimization LRM Generation Strategy Based on Cascaded NURBS. Symmetry. 2022; 14(7):1307. https://doi.org/10.3390/sym14071307
Chicago/Turabian StyleDing, Song, Kui Zhou, Yanding Yang, Youbing Zhang, Kai Cao, Huanghuang Liang, and Yongzhi Fu. 2022. "An Autonomous Storage Optimization LRM Generation Strategy Based on Cascaded NURBS" Symmetry 14, no. 7: 1307. https://doi.org/10.3390/sym14071307
APA StyleDing, S., Zhou, K., Yang, Y., Zhang, Y., Cao, K., Liang, H., & Fu, Y. (2022). An Autonomous Storage Optimization LRM Generation Strategy Based on Cascaded NURBS. Symmetry, 14(7), 1307. https://doi.org/10.3390/sym14071307