
Adomian Decomposition, Dynamic Analysis and Circuit Implementation of a 5D Fractional-Order Hyperchaotic System


Abstract
:1. Introduction
2. Numerical Solution of a Fractional-Order Hyperchaotic System
2.1. Adomian Decomposition Method
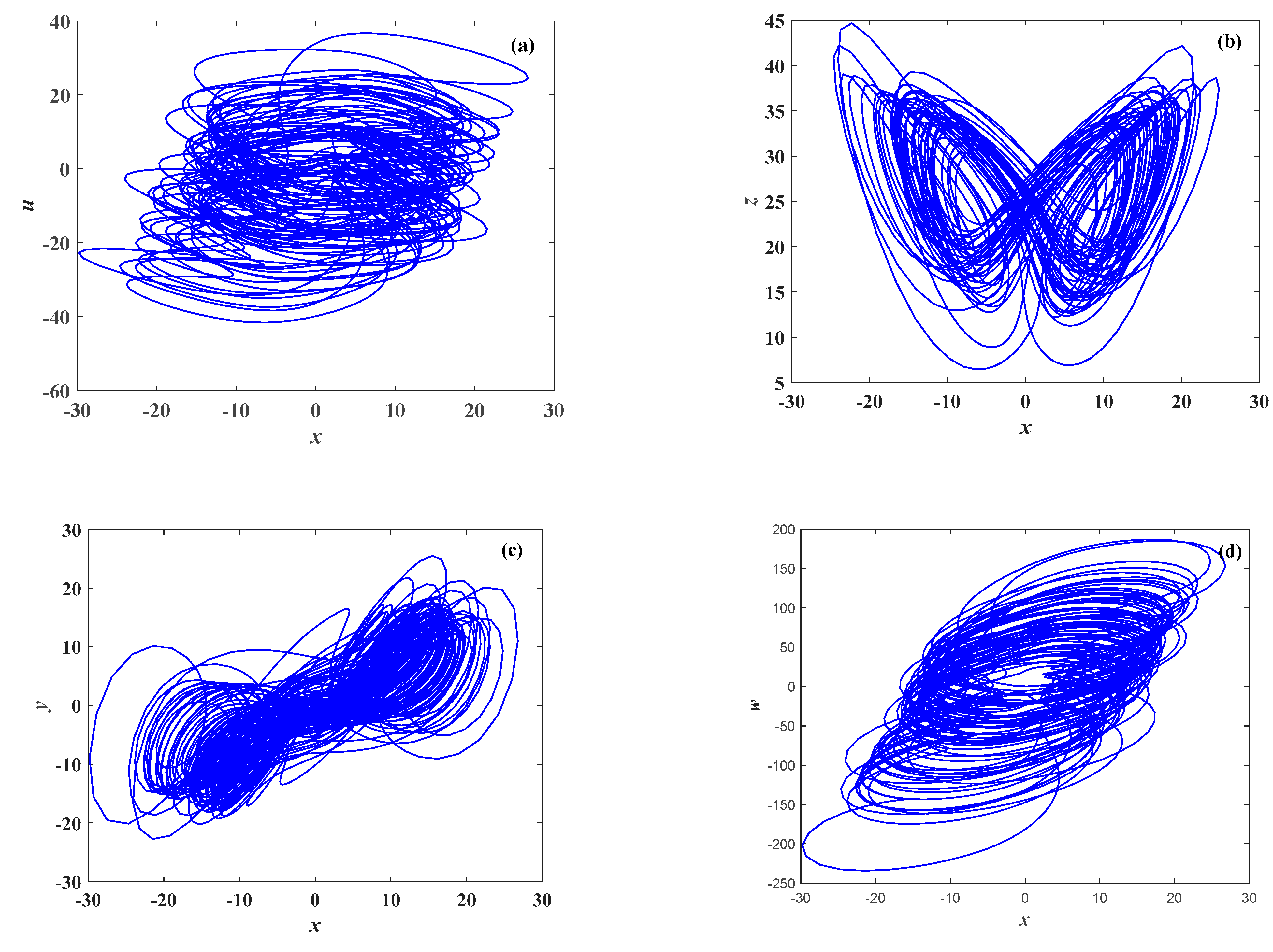
2.2. Solution of the 5D Fraction-Order Chaotic Systems
2.3. Symmetry Analysis
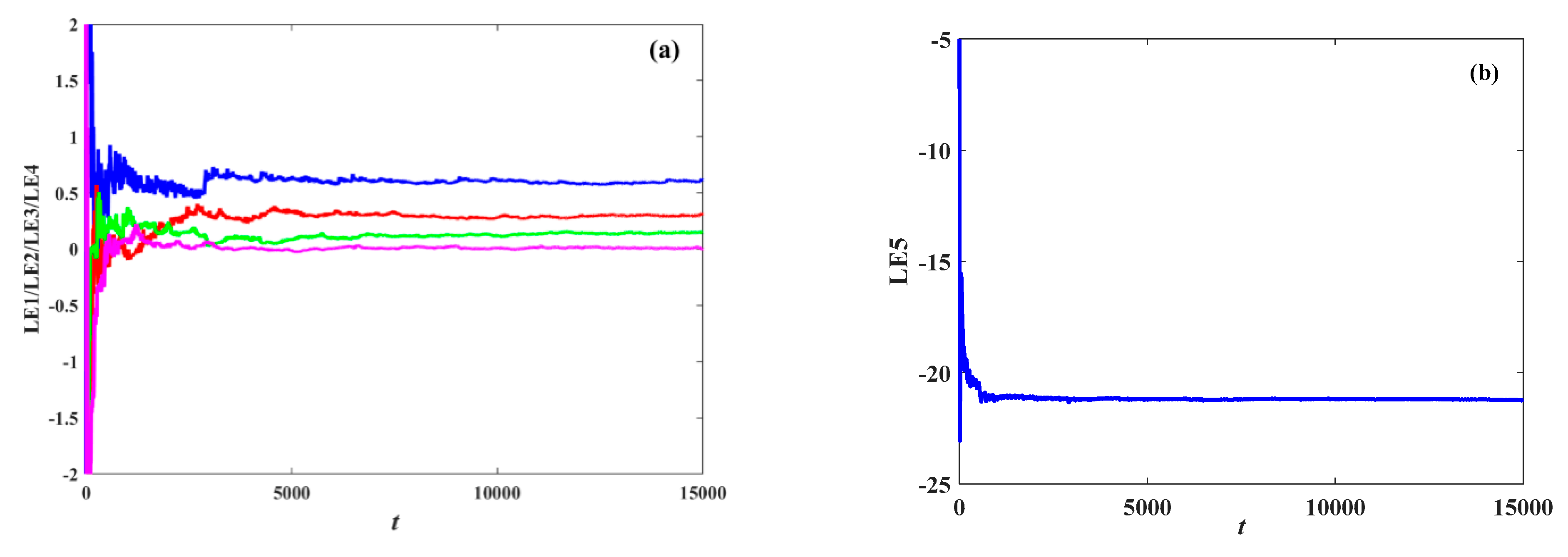
3. Lyapunov Exponents Algorithm
4. Analysis of Dynamical Characteristics
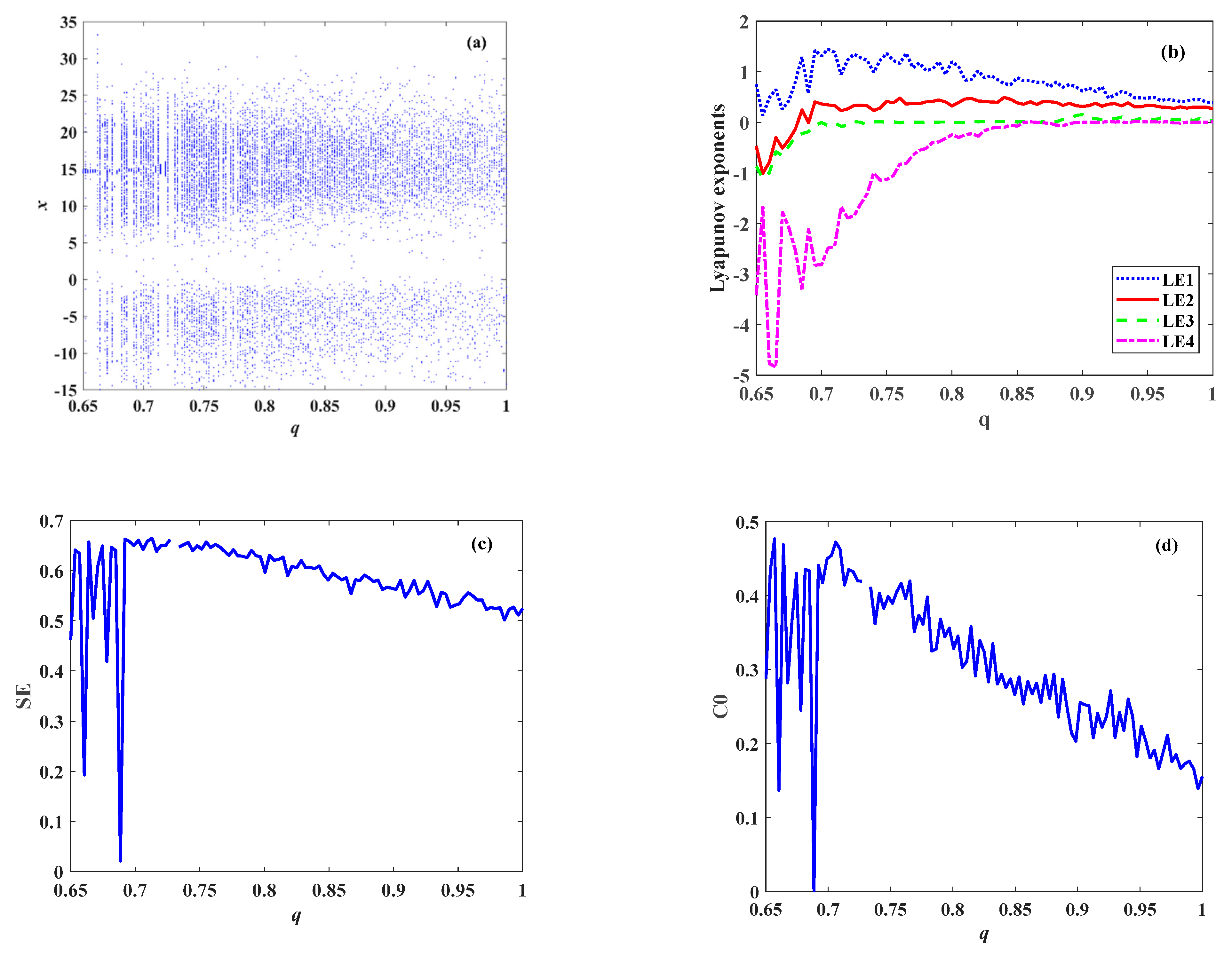
4.1. Varying Parameter q
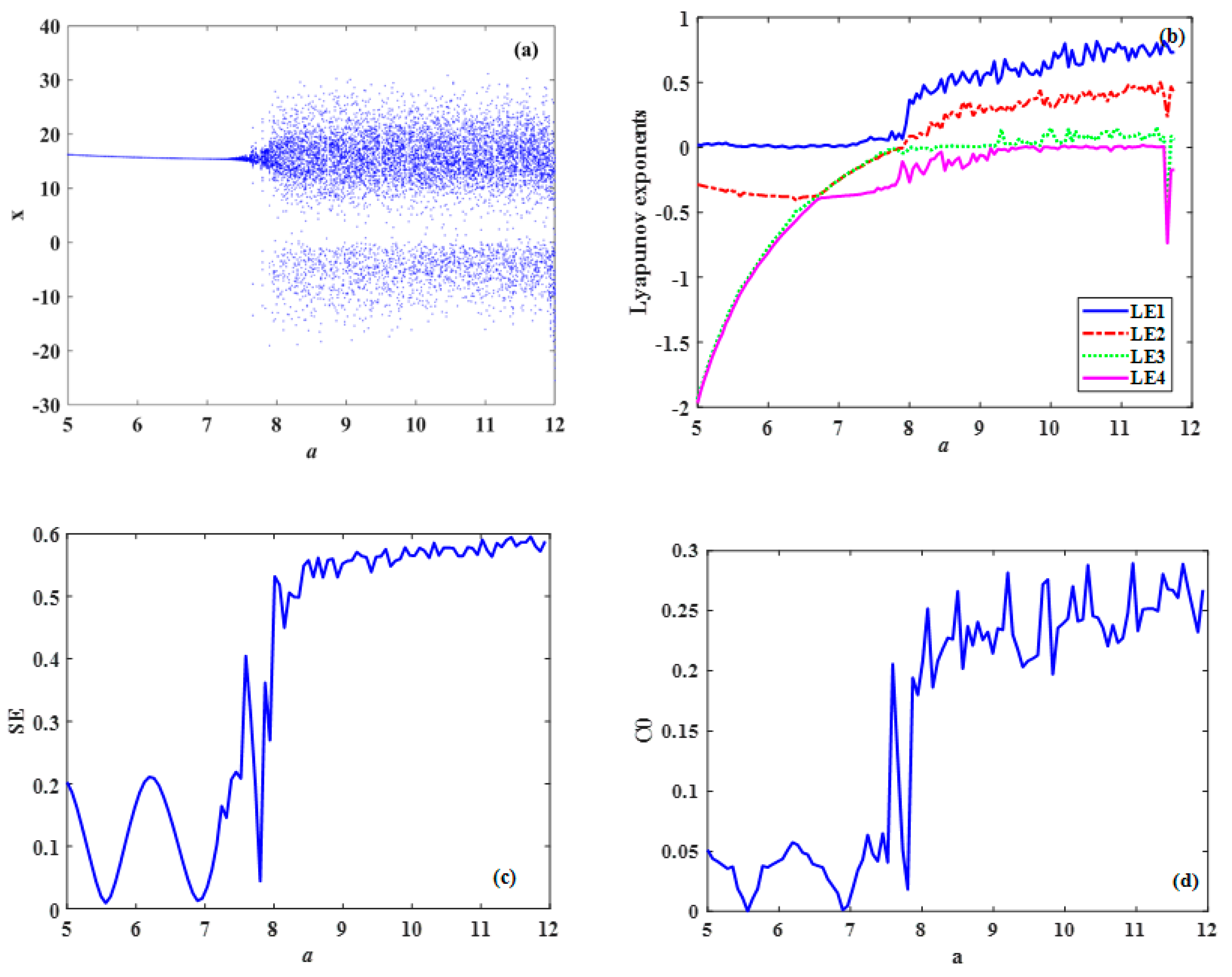
4.2. Parameter a Varying
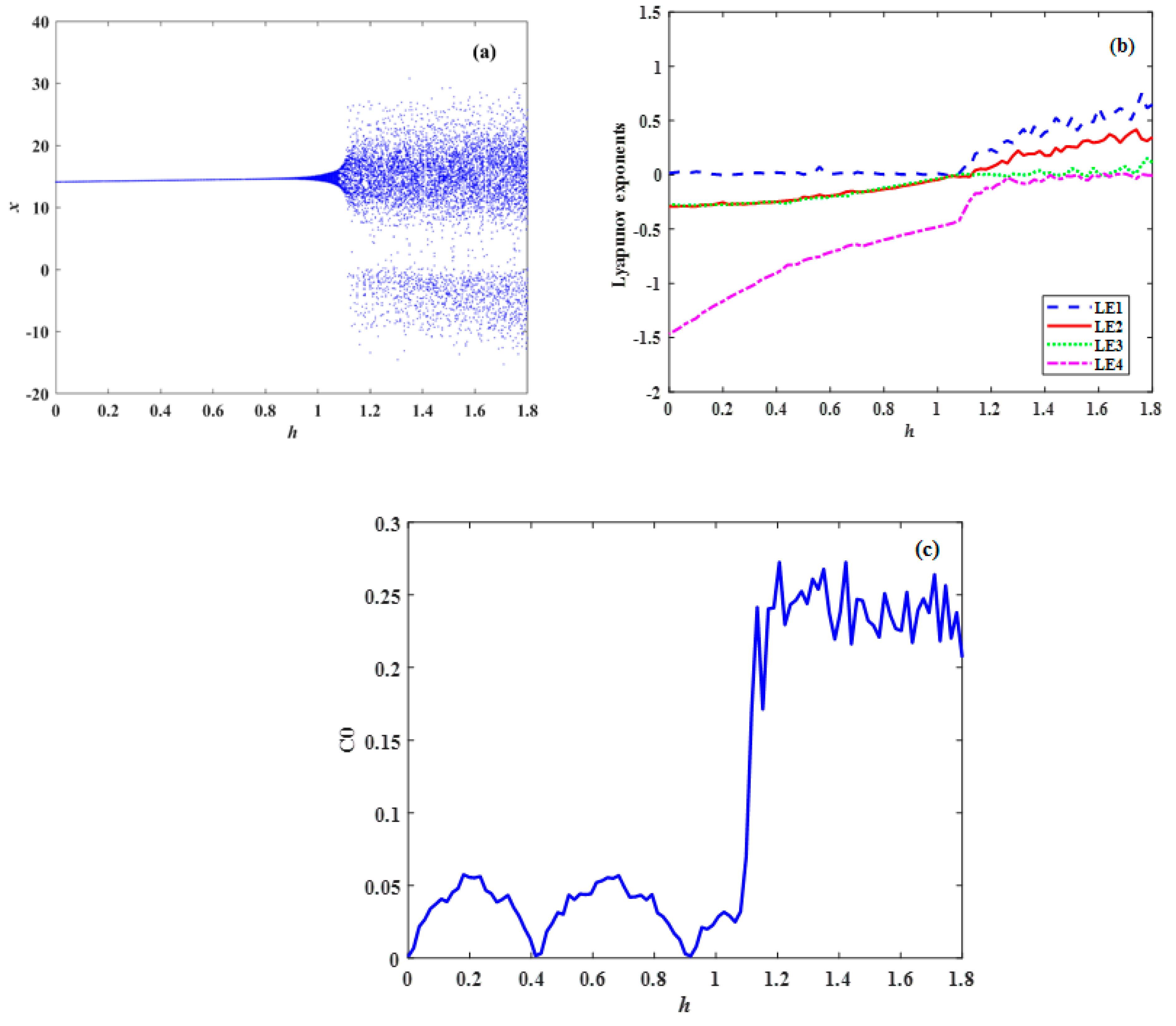
4.3. Varying Parameter h
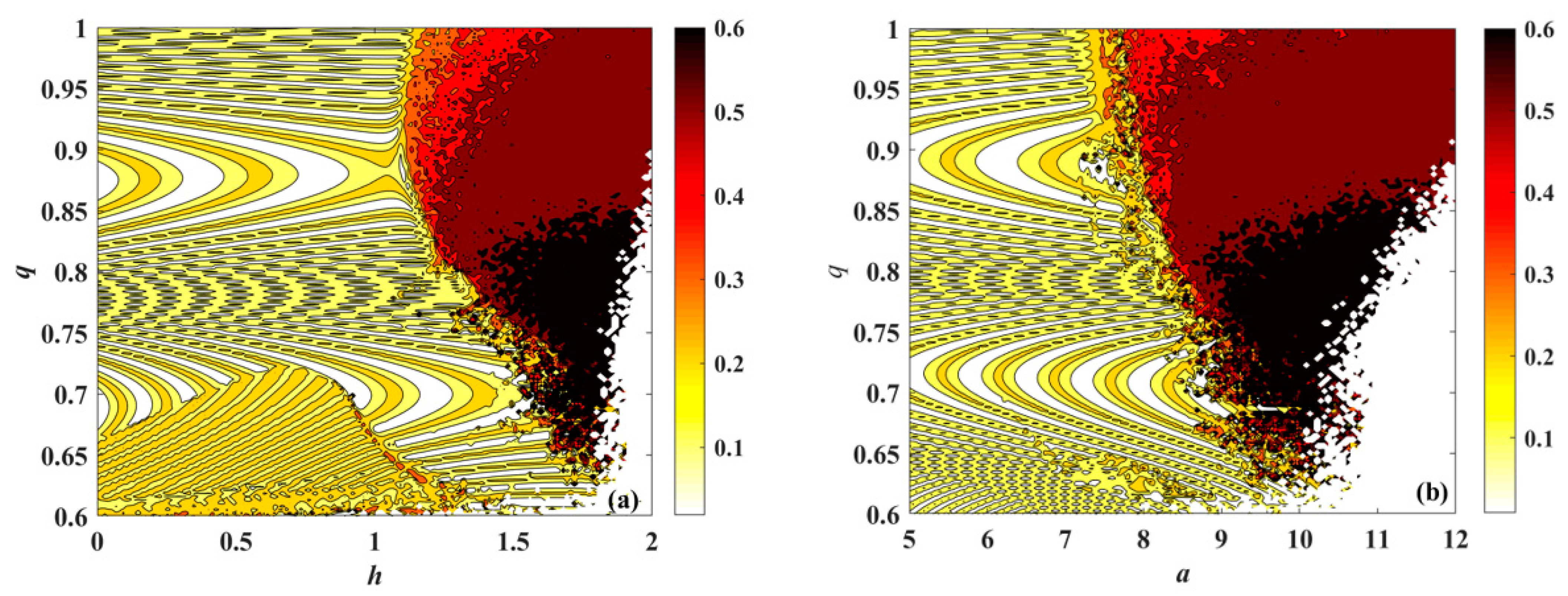
4.4. C0 Complexity Diagram
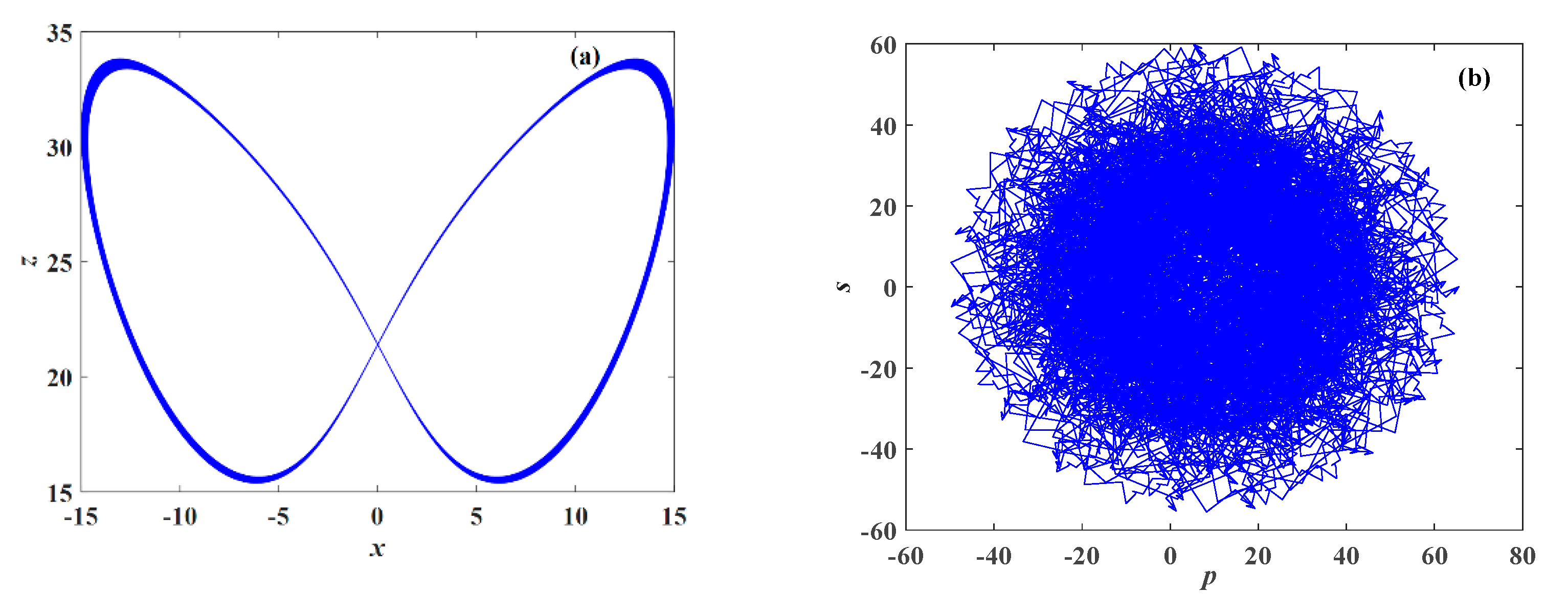
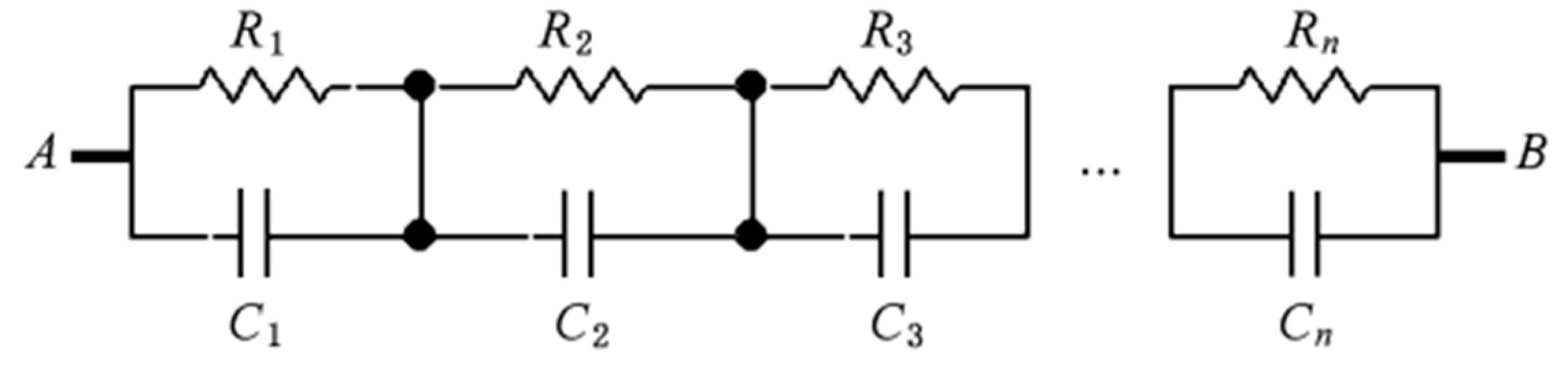
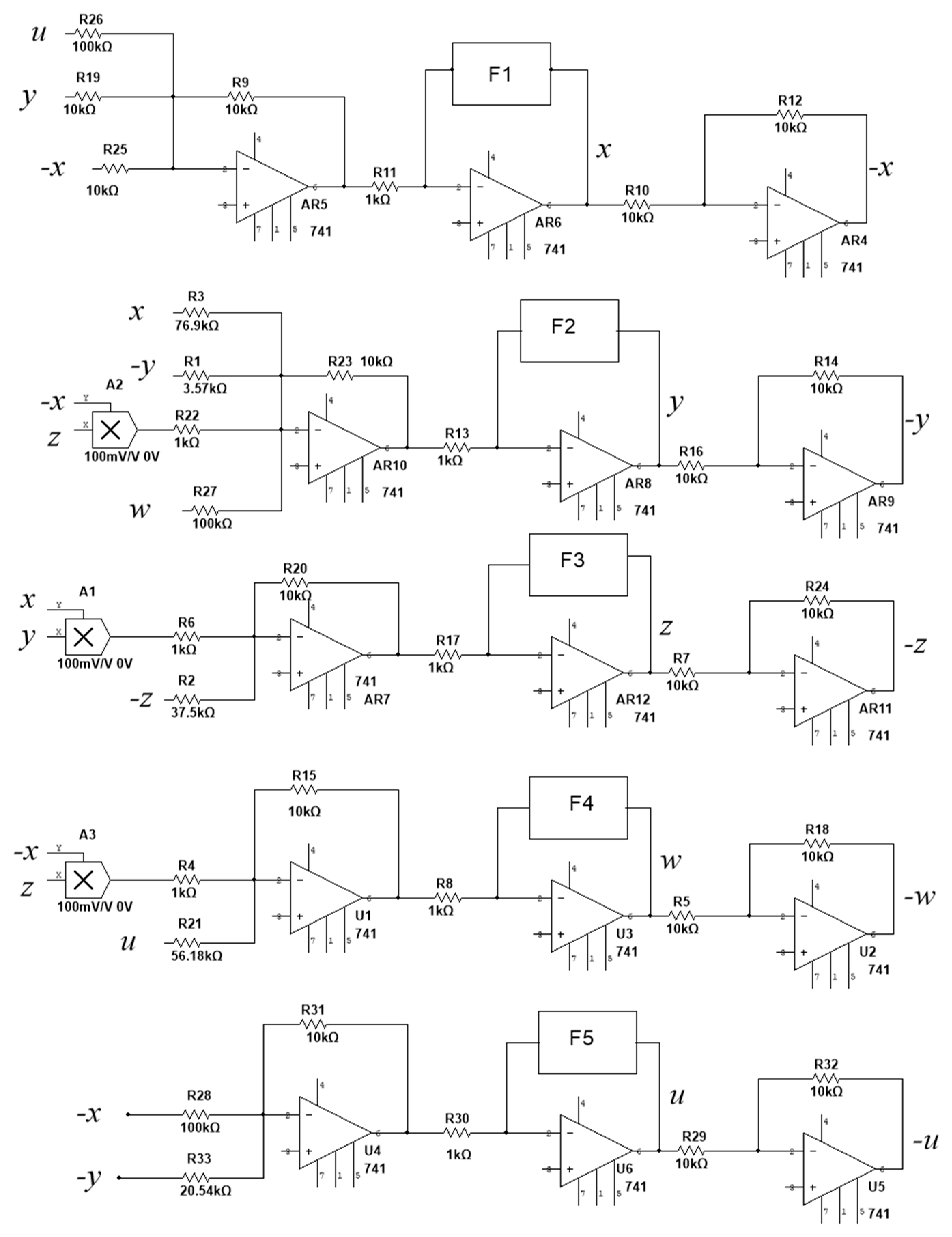
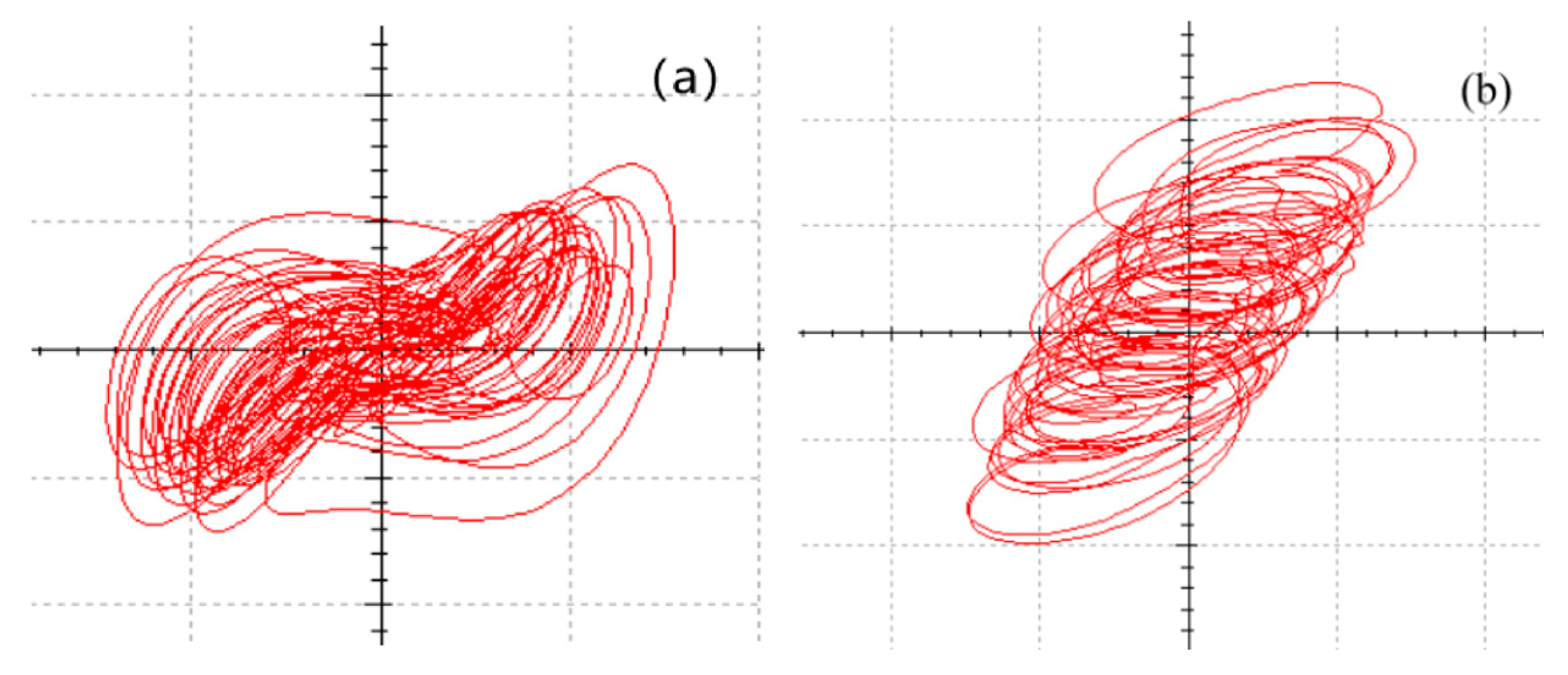
5. Design and Simulation of a Fractional-Order Circuit
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bolotin, K.I.; Ghahari, F.; Shulman, M.D.; Stormer, H.L.; Kim, P. Observation of the fractional quantum Hall effect in graphene. Nature 2009, 462, 196–199. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tarasov, V.E.; Zaslavsky, G.M. Fractional dynamics of coupled oscillators with long-range interaction. Chaos Interdiscip. J. Nonlinear Sci. 2006, 16, 023110. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Agrawal, O.P. A general formulation and solution scheme for fractional optimal control problems. Nonlinear Dyn. 2004, 38, 323–337. [Google Scholar] [CrossRef]
- Torvik, P.J.; Bagley, R.L. On the appearance of the fractional derivative in the behavior of real materials. J. Appl. Mech. 1984, 51, 725–728. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, K.; He, S.; Wang, H. Dynamics of fractional-order sinusoidally forced simplified Lorenz system and its synchronization. Eur. Phys. J. Spec. Topics 2014, 223, 1591–1600. [Google Scholar] [CrossRef]
- He, S.; Sun, K.; Wang, H. Complexity analysis and DSP implementation of the fractional-order Lorenz hyperchaotic system. Entropy 2015, 17, 8299–8311. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Lei, T.; Lu, S.; Dai, W.; Qiu, L.; Zhong, L. Dynamics and Complexity Analysis of Fractional-Order Chaotic Systems with Line Equilibrium Based on Adomian Decomposition. Complexity 2020, 2020, 5710765. [Google Scholar] [CrossRef]
- Lei, T.; Mao, B.; Zhou, X.; Fu, H. Dynamics Analysis and Synchronous Control of Fractional-Order Entanglement Symmetrical Chaotic Systems. Symmetry 2021, 13, 1996. [Google Scholar] [CrossRef]
- He, S.; Natiq, H.; Banerjee, S.; Sun, K. Complexity and Chimera States in a Network of Fractional-Order Laser Systems. Symmetry 2021, 13, 341. [Google Scholar] [CrossRef]
- He, S.; Sun, K.; Wang, H.; Mei, X.; Sun, Y. Generalized synchronization of fractional-order hyperchaotic systems and its DSP implementation. Nonlinear Dyn. 2018, 92, 85–96. [Google Scholar] [CrossRef]
- Li, C.; Su, K.; Tong, Y.; Li, H. Robust synchronization for a class of fractional-order chaotic and hyperchaotic systems. Opt.-Int. J. Light Electron Opt. 2013, 124, 3242–3245. [Google Scholar] [CrossRef]
- He, J.; Lei, T.; Jiang, L. Sliding Mode Matrix-Projective Synchronization for Fractional-Order Neural Networks. J. Math. 2021, 2021, 4562392. [Google Scholar] [CrossRef]
- He, S.; Banerjee, S.; Yan, B. Chaos and symbol complexity in a conformable fractional-order memcapacitor system. Complexity 2018, 2018, 4140762. [Google Scholar] [CrossRef]
- Gorenflflo, R.; Mainardi, F. Fractal and Fractional Calculus in Continuum Mechanics; Springer: New York, NY, USA, 1997. [Google Scholar]
- Tavazoei, M.S.; Haeri, M. Unreliability of frequency-domain approximation in recognizing chaos in fractional-order systems. IET Signal Process. 2007, 1, 171–181. [Google Scholar] [CrossRef]
- Sun, H.H.; Abdelwahab, A.; Onaral, B. Linear approximation of transfer function with a pole of fractional power. IEEE Trans. Autom. Control 1984, 29, 441–444. [Google Scholar] [CrossRef]
- Deng, W. Short memory principle and a predictor–corrector approach for fractional differential equations. J. Comput. Appl. Math. 2007, 206, 174–188. [Google Scholar] [CrossRef] [Green Version]
- Diethelm, K.; Ford, N.J.; Freed, A.D. A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn. 2002, 29, 3–22. [Google Scholar] [CrossRef]
- Adomian, G. A review of the decomposition method and some recent results for nonlinear equations. Math. Comput. Model. 1990, 13, 17–43. [Google Scholar] [CrossRef]
- Wang, H.H.; Sun, K.H.; He, S.B. Dynamic analysis and implementation of a digital signal processor of a fractional-order Lorenz–Stenflflo system based on the Adomian decomposition method. Phys. Scr. 2015, 90, 15206. [Google Scholar] [CrossRef]
- Peng, D.; Sun, K.H.; He, S.B.; Zhang, L.M.; Alamodi, A.O. Numerical analysis of a simplest fractional-order hyperchaotic system. Theor. Appl. Mech. Lett. 2019, 9, 220–228. [Google Scholar] [CrossRef]
- Fazzino, S.; Caponetto, R.; Patané, L. A new model of Hopfifield network with fractional-order neurons for parameter estimation. Nonlinear Dyn. 2021, 104, 2671–2685. [Google Scholar] [CrossRef]
- Zhang, H.; Sun, K.; He, S. A fractional-order ship power system with extreme multistability. Nonlinear Dyn. 2021, 106, 1027–1040. [Google Scholar] [CrossRef]
- Yan, B.; He, S. Dynamics and complexity analysis of the conformable fractional-order two-machine 269 interconnected power system. Math. Methods Appl. Sci. 2021, 44, 2439–2454. [Google Scholar] [CrossRef]
- He, S.; Sun, K.; Mei, X.; Yan, B.; Xu, S. Numerical analysis of a fractional-order chaotic system based on conformable fractional-order derivative. Eur. Phys. J. Plus 2017, 132, 1–11. [Google Scholar] [CrossRef]
- Shao-Bo, H.; Ke-Hui, S.; Hui-Hai, W. Solution of the fractional-order chaotic system based on Adomian decomposition algorithm and its complexity analysis. Acta Phys. Sin. 2014, 63, 58–65. [Google Scholar] [CrossRef]
- Yang, Q.; Chen, C. A 5D Hyperchaotic system with three positive Lyapunov exponents coined. Int. J. Bifurc. Chaos 2013, 23, 1350109. [Google Scholar] [CrossRef]
- Staniczenko, P.P.; Lee, C.F.; Jones, N.S. Rapidly detecting disorder in rhythmic biological signals: A spectral entropy measure to identify cardiac arrhythmias. Phys. Rev. 2009, 79, 011915. [Google Scholar] [CrossRef]
- En-hua, S.; Zhi-jie, C.; Fan-ji, G. Mathematical foundation of a new complexity measure. Appl. Math. Mech. 2005, 26, 1188–1196. [Google Scholar] [CrossRef]
- Wang, Z.; Lei, T.F.; Xi, X.J.; Sun, W. Fractional control and generalized synchronization for a nonlinear electromechanical chaotic system and its circuit simulation with Multisim. Turk. J. Electr. Eng. Comput. Sci. 2016, 24, 1502–1515. [Google Scholar] [CrossRef]
- Alattas, K.A.; Mostafaee, J.; Sambas, A.; Alanazi, A.K.; Mobayen, S.; Vu, M.T.; Zhilenkov, A. Nonsingular Integral-Type Dynamic Finite-Time Synchronization for Hyper-Chaotic Systems. Mathematics 2022, 10, 115. [Google Scholar] [CrossRef]
- Ahmad, W.M.; Sprott, J.C. Chaos in fractional-order autonomous nonlinear systems. Chaos Solitons Fractals 2003, 16, 339–351. [Google Scholar] [CrossRef] [Green Version]
- Chongxin, L. Theory and Application of Fractional Order Chaotic Circuits; Xi’an Jiaotong University Press: Xi’an, China, 2011. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| q | |
|---|---|
| 0.90 | |
| 0.91 | |
| 0.92 | |
| 0.93 | |
| 0.94 | |
| 0.95 | |
| 0.96 | |
| 0.97 | |
| 0.98 | |
| 0.99 |
| q | R1 | R2 | R3 |
|---|---|---|---|
| 0.90 | 62.8473 | 0.2530 | 0.0250 |
| 0.91 | 65.8081 | 0.1574 | 0.0094 |
| 0.92 | 69.3310 | 0.0863 | 0.00027 |
| 0.93 | 72.4527 | 0.03932 | 0.00054 |
| 0.94 | 75.7025 | 0.0136 | 6.3 × 10−6 |
| 0.95 | 79.6984 | 0.00305 | |
| 0.96 | 83.6984 | 0.0030 | |
| 0.97 | 86.9527 | 7.1 × 10−6 | |
| 0.98 | 91.5535 | 3.4 × 10−9 | |
| 0.99 | 95.6434 | 3.5 × 10−19 |
| q | C1 | C2 | C3 |
|---|---|---|---|
| 0.90 | 1.2315 | 1.8348 | 1.0983 |
| 0.91 | 1.1780 | 1.7818 | 1.0739 |
| 0.92 | 1.1268 | 1.7311 | 1.0493 |
| 0.93 | 1.0783 | 1.6813 | 1.0246 |
| 0.94 | 1.0320 | 1.6320 | 1.0000 |
| 0.95 | 0.9879 | 1.5837 | |
| 0.96 | 0.9459 | 1.5366 | |
| 0.97 | 0.9056 | 1.4903 | |
| 0.98 | 0.8669 | 1.4452 | |
| 0.99 | 0.8298 | 1.4012 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, H.; Lei, T. Adomian Decomposition, Dynamic Analysis and Circuit Implementation of a 5D Fractional-Order Hyperchaotic System. Symmetry 2022, 14, 484. https://doi.org/10.3390/sym14030484
Fu H, Lei T. Adomian Decomposition, Dynamic Analysis and Circuit Implementation of a 5D Fractional-Order Hyperchaotic System. Symmetry. 2022; 14(3):484. https://doi.org/10.3390/sym14030484
Chicago/Turabian StyleFu, Haiyan, and Tengfei Lei. 2022. "Adomian Decomposition, Dynamic Analysis and Circuit Implementation of a 5D Fractional-Order Hyperchaotic System" Symmetry 14, no. 3: 484. https://doi.org/10.3390/sym14030484
APA StyleFu, H., & Lei, T. (2022). Adomian Decomposition, Dynamic Analysis and Circuit Implementation of a 5D Fractional-Order Hyperchaotic System. Symmetry, 14(3), 484. https://doi.org/10.3390/sym14030484