
A Lévy Distribution Based Searching Scheme for the Discrete Targets in Vast Region

Abstract
1. Introduction
2. The Current Search Method
3. New Search Solution Based on Satellite Image
4. Discrete Target Search Problem
4.1. Target (Black Box) Search Problem
4.2. Multi-Targets (Black Box and Wreckage) Search
5. Screening/Search Target Picture
5.1. A Uniform Distribution Search Method
5.2. A Lévy Distribution Search Method
5.3. Pseudo Code of One Target Search
- Step 1: Let parameters; including maximum generation Endgen;
- Step 2: Iteration process;
- Generate stochastically (use Uniform distribution or Lévy distribution) search start point coordinate ;
- Judge the picture of the start point coordinate to see whether it is the target;
- t := 0.
While () or (Other stop criterion)- t := t + 1;
- Generate next step search point coordinate (use Uniform distribution or Lévy distribution); If the picture of point coordinate has been searched, skip it and re-search;
- Judge the picture of search point coordinate to see whether it is the black box target; If the picture of point coordinate is the black box target, break.
- Step 3: Output last step search point coordinates and its image.
5.4. Pseudo Code of Multi-Targets Search
- Step 1: Let parameters; including maximum generation Endgen; the total num of wreckages searched.
- Step 2: Iteration process
- Generate stochastically (use Uniform distribution or Lèvy distribution) search start point coordinate ;
- Judge the picture of search start point coordinate to see whether it is the black box target or secondary target;
- Count wreckages found;
- t := 0.
While ( and secondary target ) or (black box target==1) or (Other stop criterion)- t := t + 1;
- Generate next step search point coordinate (use Uniform distribution or Lèvy distribution); If the image of point coordinate has been searched, skip it, and re-research;
- Judge the picture of search point coordinate see whether it is the black box target or secondary target;
- Count wreckage found.
- Step 3: Output secondary target number and their coordinates, last step search point coordinate, and their images.
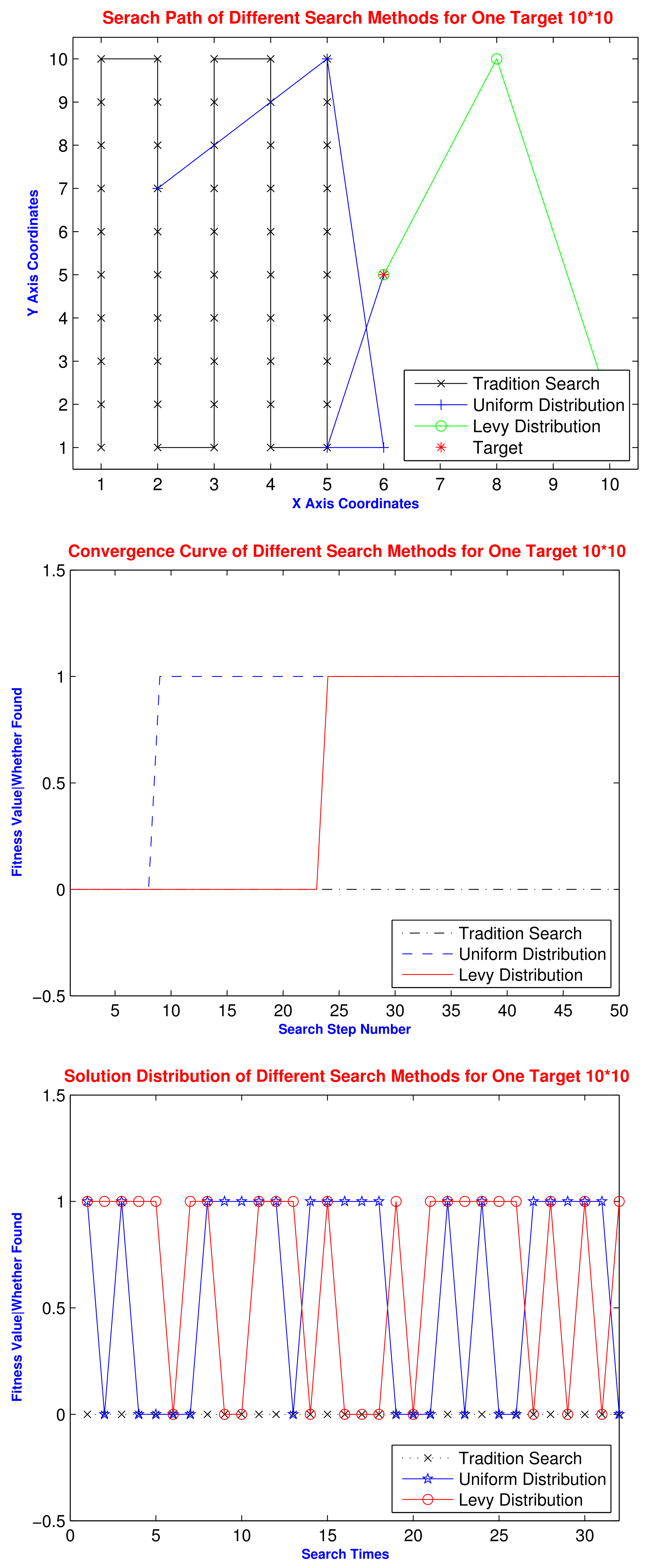
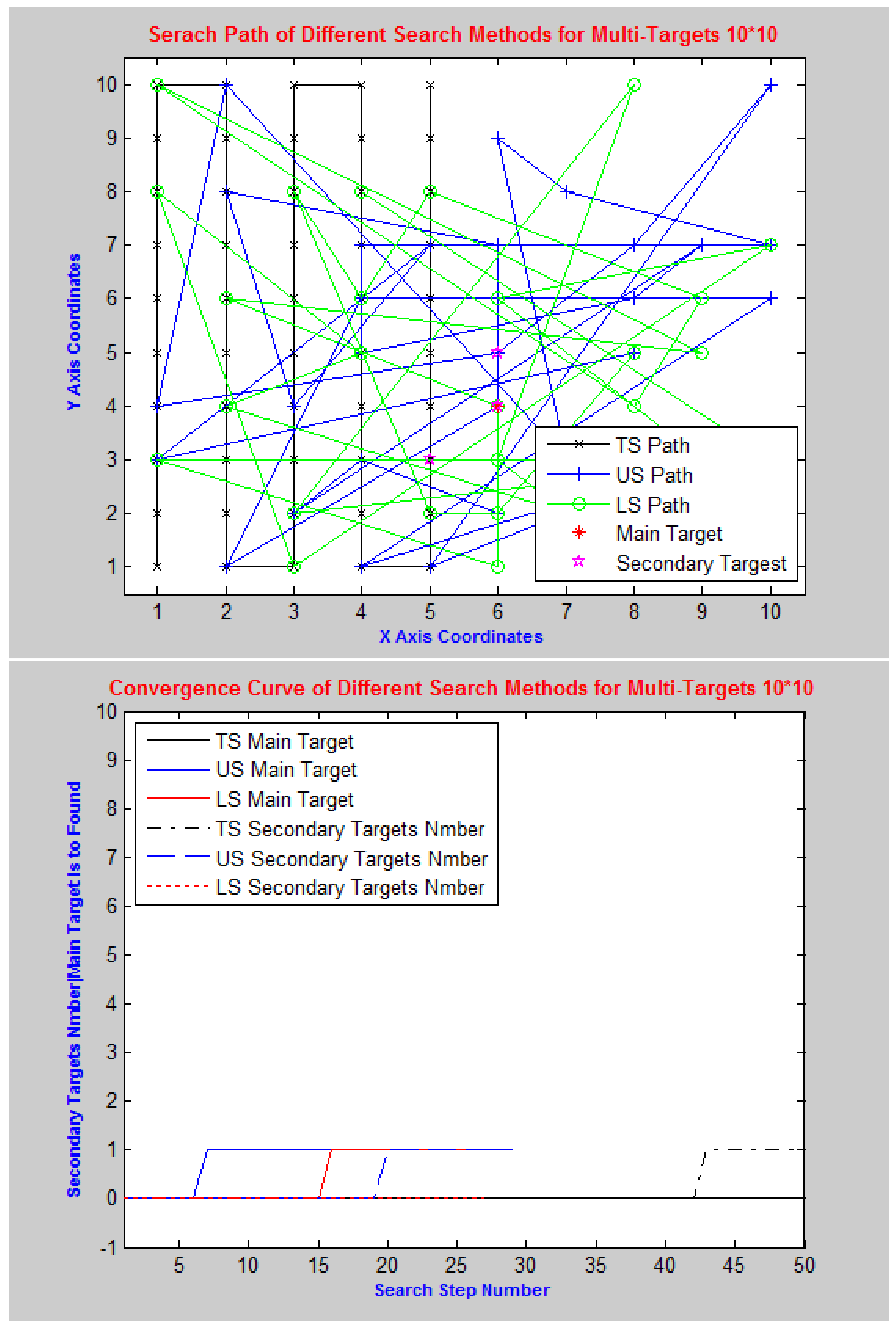
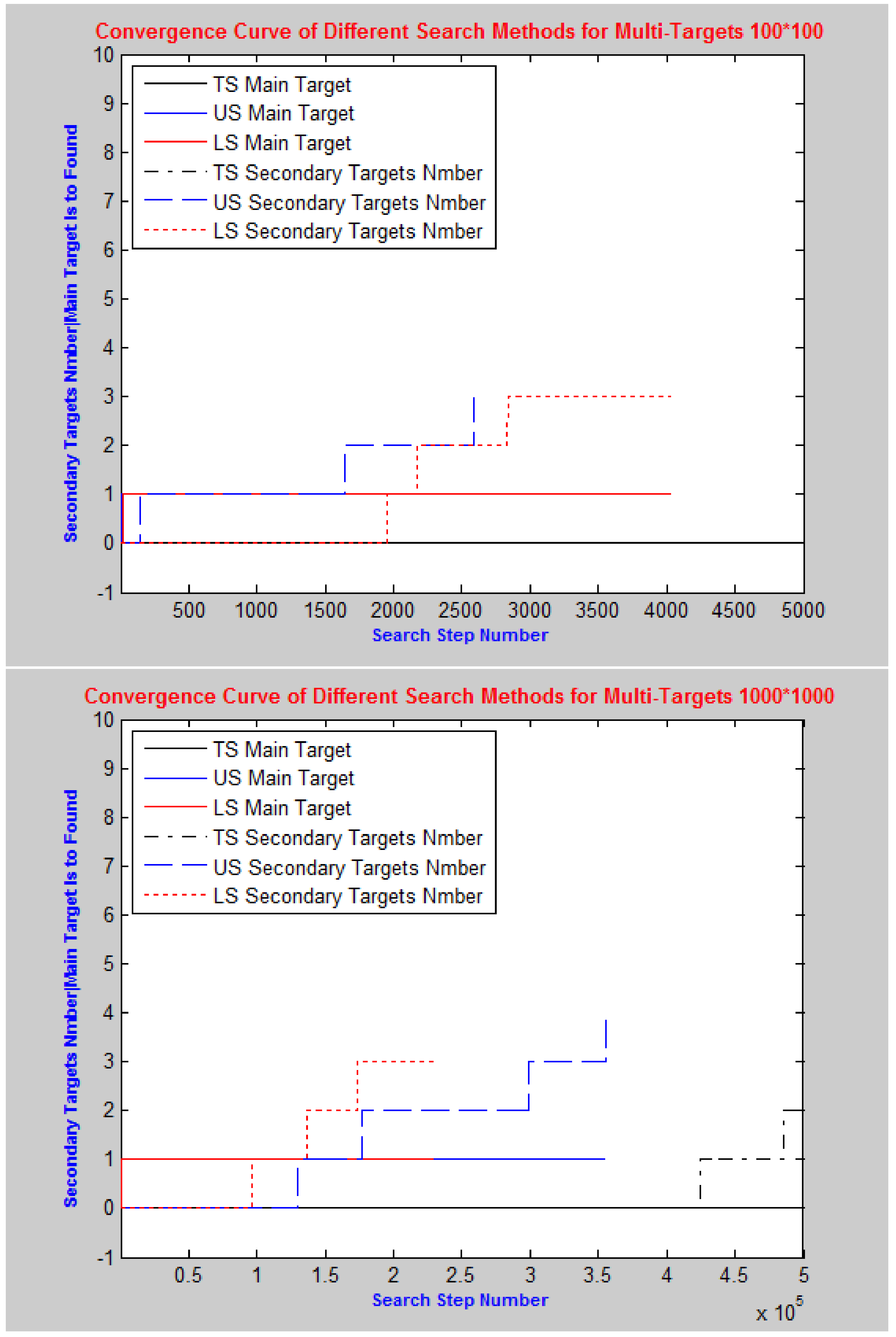
6. Experiment for Target Search Problem
6.1. Test Example
6.2. Comparison Test with Different Search Methods
6.3. Experiment of Lévy Distribution Search
7. Conclusions and Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Teamah, A.A.M.; Afifi, W.A. Quasi-coordinate search for a randomly moving target. J. Appl. Math. Phys. 2019, 8, 1814–1825. [Google Scholar] [CrossRef][Green Version]
- Duvocelle, B.; Flesch, J.; Shi, H.; Vermeulen, D.s. Search for a moving target in a competitive environment. Int. J. Game Theory 2021, 50, 547–557. [Google Scholar] [CrossRef]
- Uijlings, J.R.R.; van de Sande, K.E.A.; Gevers, T. Smeulders, Selective search for object recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef]
- Silva, G.o.; Schnitman, L.; Oliveira, L. Constraining image object search by multi-scale spectral residue analysis. Pattern Recognit. Lett. 2014, 39, 31–38. [Google Scholar] [CrossRef]
- Xin, Z.; Liao, G.; Yang, Z.; Huang, P.; Ma, J. A fast ground moving target focusing method based on first-order discrete polynomial-phase transform. Digit. Signal Proc. 2017, 60, 287–295. [Google Scholar] [CrossRef]
- Hadidy, E.; Allah, M. Fuzzy optimal search plan for N-Dimensional randomly moving target. Int. J. Comput. Method 2016, 13, 38. [Google Scholar]
- Shi, Z.; Wei, C.; Li, J.; Fu, P.; Jiang, S. Parallel search strategy in kernel feature space to track FLIR target. Neurocomputing 2016, 214, 671–683. [Google Scholar] [CrossRef]
- Li, X.; Chen, J.; Deng, F.; Li, H. Profit-driven adaptive moving targets search with UAV swarms. Sensors 2019, 7, 1545. [Google Scholar] [CrossRef]
- Song, T.; Huo, X.; Wu, X. A two-stage method for target searching in the path Planning for mobile robots. Sensors 2020, 23, 6919. [Google Scholar] [CrossRef]
- Wong, W.K.; Ye, S.; Liu, H.; Wang, Y. Effective mobile target searching using robots. Mob. Netw. Appl. 2020, 1–17. [Google Scholar] [CrossRef]
- Pandey, K.K.; Parhi, D.R. Trajectory planning and the target search by the mobile robot in an environment using a behavior-based neural network approach. Robotica 2020, 9, 1627–1641. [Google Scholar] [CrossRef]
- Khosraviani, M.; Zamani, M.S.; Bidkhori, G. FogLight: An efficient matrix-based approach to construct metabolic pathways by search space reduction. Bioinformatics 2016, 32, 398–408. [Google Scholar] [CrossRef][Green Version]
- Arya, K.V.; Gupta, P.; Kalra, P.K.; Mitra, P. Image registration using robust M-estimators. Pattern Recognit. Lett. 2007, 28, 1957–1968. [Google Scholar] [CrossRef]
- Chiroma, H.; Herawan, T.; Fister, I.; Fister, I.; Abdulkareem, S.; Shuib, L.; Hamza, M.F.; Saadi, Y.; Abubakar, A. Bio-inspired computation: Recent development on the modifications of the cuckoo search algorithm. Appl. Soft Comput. 2017, 61, 149–173. [Google Scholar] [CrossRef]
- Yang, X.; Deb, S. Cuckoo search: Recent advances and applications. Neural Comput. Appl. 2014, 24, 169–174. [Google Scholar] [CrossRef]
- Walton, S.; Hassan, O.; Morgan, K. Selected engineering applications of gradient free optimisation using Cuckoo search and proper orthogonal decomposition. Arch. Comput. Methods Eng. 2013, 20, 123–154. [Google Scholar] [CrossRef]
- Alsheddy, A. A two-phase local search algorithm for the ordered clustered travelling salesman problem. Int. J. Metaheuristics 2018, 1, 80–92. [Google Scholar] [CrossRef]
- Bülentatay, G.E. Accelerating local search algorithms for the travelling salesman problem through the effective use of GPU. Transp. Res. Procedia 2017, 22, 409–418. [Google Scholar]
- Yildiz, A.R. Cuckoo search algorithm for the selection of optimal machining parameters in milling operations. Int. J. Adv. Manuf. Technol. 2013, 1–4, 55–61. [Google Scholar] [CrossRef]
- Ljouad, T.; Amine, A.; Rziza, M. A hybrid mobile object tracker based on the modified Cuckoo search algorithm and the Kalman filter. Pattern Recognit. 2014, 11, 3597–3613. [Google Scholar] [CrossRef]
- Walia, G.S.; Kapoor, R. Intelligent video target tracking using an evolutionary particle filter based upon improved cuckoo search. Expert Syst. Appl. 2014, 41, 6315–6326. [Google Scholar] [CrossRef]
- de Menezes, D.Q.F.; Prata, D.M.; Secchi, A.R.; Pinto, J.C. A review on robust M-estimators for regression analysis. Comput. Chem. Eng. 2021, 147, 107254. [Google Scholar] [CrossRef]
- Huillet, T.E. On Mittag-Leffler distributions and related stochastic processes. J. Comput. Appl. Math. 2016, 296, 181–211. [Google Scholar] [CrossRef]
- Kwasnicka, H.; Przewozniczek, M. Multi population pattern searching algorithm: A new evolutionary method based on the idea of messy genetic algorithm. IEEE Trans. Evol. Comput. 2011, 15, 715–734. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Search Methods | Abbreviation | Min/Average/Std | Search Solution | Succeed Times | Successful Rate | |
|---|---|---|---|---|---|---|
| E1 | Traditional | T | 50/50/0 | 0 | 0 | 0 |
| EG = 50 X = [0,10] | Uniform distribution | U | 5/37.1563/15.7544 | 1 | 19 | 0.5938 |
| Y = [0,10] | Lévy distribution | L | 3/33.5938/16.3408 | 1 | 21 | 0.6563 |
| E2 | Traditional | T | 1250/1250/0 | 0 | 0 | 0 |
| EG = 1250 X = [0,50] | Uniform distribution | U | 89/994.4688/391.3227 | 1 | 14 | 0.4375 |
| Y = [0,50] | Lévy distribution | L | 56/1.0228 × 10/359.3115 | 1 | 14 | 0.4375 |
| E3 | Traditional | T | 5000/5000/0 | 0 | 0 | 0 |
| EG = 5000 X = [0,100] | Uniform distribution | U | 1070/4179.5/1162.7 | 1 | 15 | 0.4688 |
| Y = [0,100] | Lévy distribution | L | 292/3390.3/1724.1 | 1 | 20 | 0.625 |
| E4 | Traditional | T | 500,000/500,000/0 | 0 | 0 | 0 |
| EG = 500,000 X = [0,1000] | Uniform distribution | U | 1564/399,200/169,030 | 1 | 12 | 0.375 |
| Y = [0,1000] | Lévy distribution | L | 55,876/126,110/384,780 | 1 | 20 | 0.625 |
| E5 | Traditional | T | 50,000,000/50,000,000/0 | 0 | 0 | 0 |
| EG = 50,000,000 X = [0,10,000] | Uniform distribution | U | 1,344,005/3.9177 × 10/1.237 × 10 | 1 | 19 | 0.4688 |
| Y = [0,10,000] | Lévy distribution | L | 223,230/3.0076 × 10/1.8725 × 10 | 1 | 24 | 0.8438 |
| Search | Min/Average/Std | Main Target | Secondary Targets | |||||
|---|---|---|---|---|---|---|---|---|
| Methods | Search Solution | Succeed Times | Successful Rate | Found Average | Succeed Times | Successful Rate | ||
| E6 | Traditional | 50/50/0 | 0 | 0 | 0 | 1 | 20 | 1 |
| WN = 1 EG = 50 | Uniform distribution | 29/45.6/7.074 | 1 | 9 | 0.45 | 0.8 | 14 | 0.7 |
| X = [0,10] Y = [0,10] | Lévy distribution | 27/45.05/7.2655 | 1 | 11 | 0.55 | 1.05 | 18 | 0.9 |
| E7 | Traditional | 1250/1250/0 | 0 | 0 | 0 | 1 | 0 | 0 |
| WN = 2 EG = 1250 | Uniform distribution | 873/1.1872 × 10 129.1191 | 1 | 7 | 0.35 | 1.6 | 11 | 0.55 |
| X = [0,50] Y = [0,50] | Lévy distribution | 753/1.215 × 10 /117.8882 | 1 | 9 | 0.45 | 1.25 | 7 | 0.35 |
| E8 | Traditional | 5000/5000/0 | 0 | 0 | 0 | 0 | 0 | |
| WN = 3 EG = 5000 | Uniform distribution | 2585/4795 /585.0487 | 1 | 8 | 0.4 | 1.85 | 6 | 0.3 |
| X = [0,100] Y = [0,100] | Lévy distribution | 4036/4.8501 × 10 /3339.8648 | 1 | 14 | 0.7 | 2.1 | 7 | 0.35 |
| E9 | Traditional | 5× 10/5 × 10 | 0 | 0 | 0 | 2 | 0 | 0 |
| WN = 4 EG = 5× 10 | Uniform distribution | 355,541/4.8573 × 10 /3.8108× 10 | 1 | 10 | 0.5 | 2.9 | 5 | 0.25 |
| X = [0,1000] Y = [0,1000] | Lévy distribution | 230,160/4.4476 × 10 /7.9752× 10 | 1 | 15 | 0.75 | 3.4 | 12 | 0.6 |
| E10 | Traditional | 2.5 × 10/2.5× 10 /2.5× 10 | 0 | 0 | 0 | 0 | 0 | 0 |
| WN = 5 EG = 2.5 × 10 | Uniform distribution | 2.5× 10/2.5× 10 /2.5 × 10 | 1 | 5 | 0.25 | 2 | 0 | 0 |
| X = [0,10,000] Y = [0,10,000] | Lévy distribution | 16,166,752/2.3883 × 10 /2.7461× 10 | 1 | 9 | 0.45 | 3.85 | 7 | 0.35 |
| Main Target of One Target Search | Main Target of Multi-Target Search | |||||
|---|---|---|---|---|---|---|
| Test Problem | Opimum Average | Test Problem | Main Target | Secondary Targets | ||
| E1 EG = 50 | 0.9 | 1.8, −0.9 0.4, −0.6 0.2, −0.4 0.8, −0.3 1.0, −0.3 1.2, −0.2 1.3, −0.1 1.5, 0.1 1.4, 0.7 1.4, 0.8 0.2, 0.9 | E6 WN = 1 EG = 50 | 1 | 1.8 | 0.1, −0.5; 0.1, −0.1; 0.8, 0. |
| E2 EG = 1250 | 0.9 | 1.2, 0.5 | E7 WN = 2 EG = 1250 | 1 | 2.5 | 1.3, −0.9; 1.3, −0.7; 1.2, −0.5 0.9, 0.4; 0.9, 0.5; 0.8, 0.9; 0.8, 1 |
| E3 EG = 5000 | 1 | 1.8, −0.5 0.5, 1.0 | E8 WN = 3 EG = 5000 | 1 | 2.9 | 0.3, −0.7 |
| E4 EG = 500,000 | 1 | 0.4, −0.1 0.9, 0.3 0.5, 0.9 | E9 WN = 4 EG = 500,000 | 1 | 4.8 | 0.4, 0.8; 0.2, 0.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lian, Z.; Luo, D.; Dai, B.; Chen, Y. A Lévy Distribution Based Searching Scheme for the Discrete Targets in Vast Region. Symmetry 2022, 14, 272. https://doi.org/10.3390/sym14020272
Lian Z, Luo D, Dai B, Chen Y. A Lévy Distribution Based Searching Scheme for the Discrete Targets in Vast Region. Symmetry. 2022; 14(2):272. https://doi.org/10.3390/sym14020272
Chicago/Turabian StyleLian, Zhigang, Dan Luo, Bingrong Dai, and Yangquan Chen. 2022. "A Lévy Distribution Based Searching Scheme for the Discrete Targets in Vast Region" Symmetry 14, no. 2: 272. https://doi.org/10.3390/sym14020272
APA StyleLian, Z., Luo, D., Dai, B., & Chen, Y. (2022). A Lévy Distribution Based Searching Scheme for the Discrete Targets in Vast Region. Symmetry, 14(2), 272. https://doi.org/10.3390/sym14020272