

Explicitly Modeling Stress Softening and Thermal Recovery for Rubber-like Materials


Abstract
1. Introduction
- The compressible condition should be incorporated into the model to simplify calculations in the nonlinear elastic behavior at large deformation.
- All parameters incorporated into the model should be explicit so that the undue complexities of computation can be avoided.
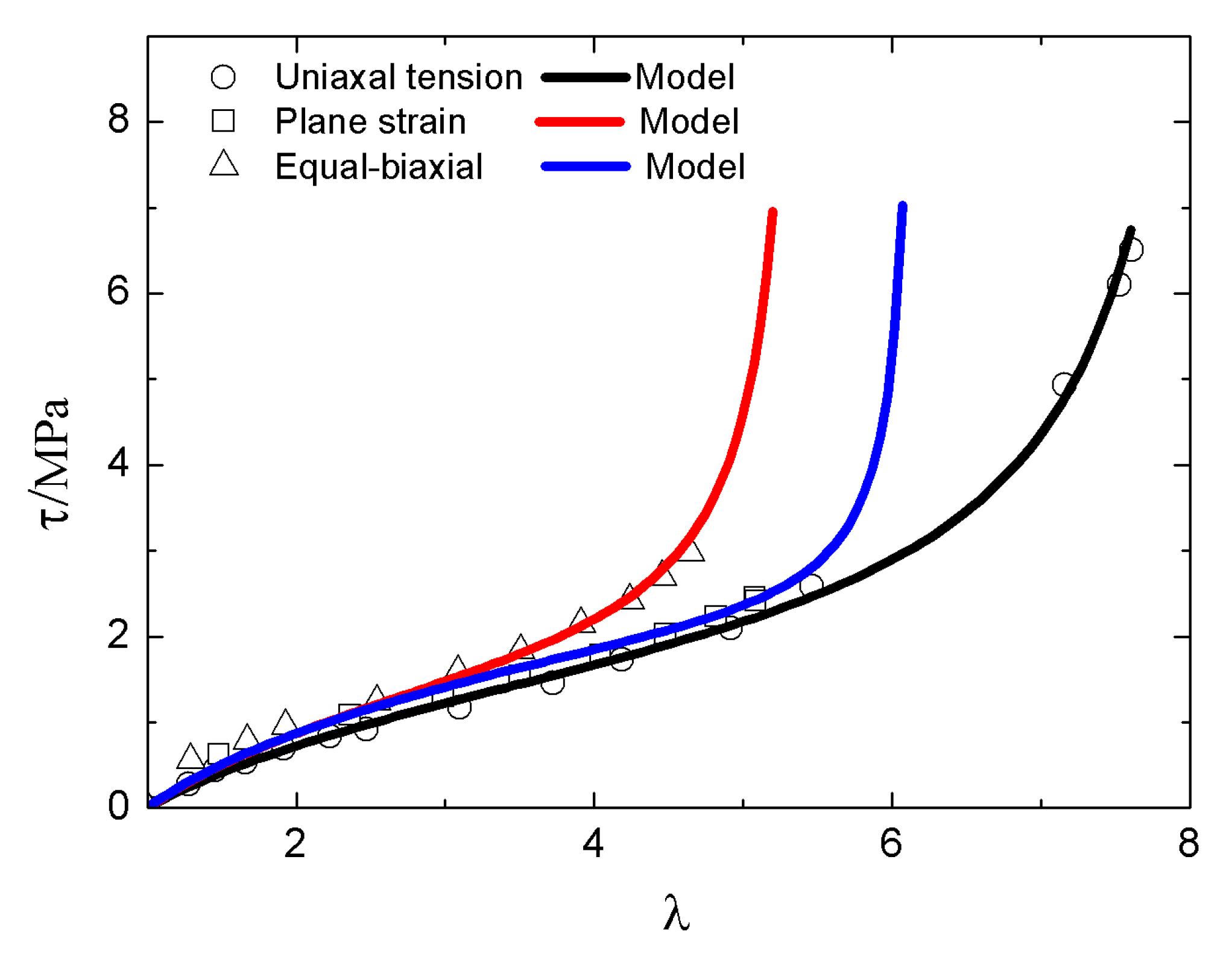
- A robust model should not only simulate one kind of experiment, for instance, uniaxial tension, but also others.
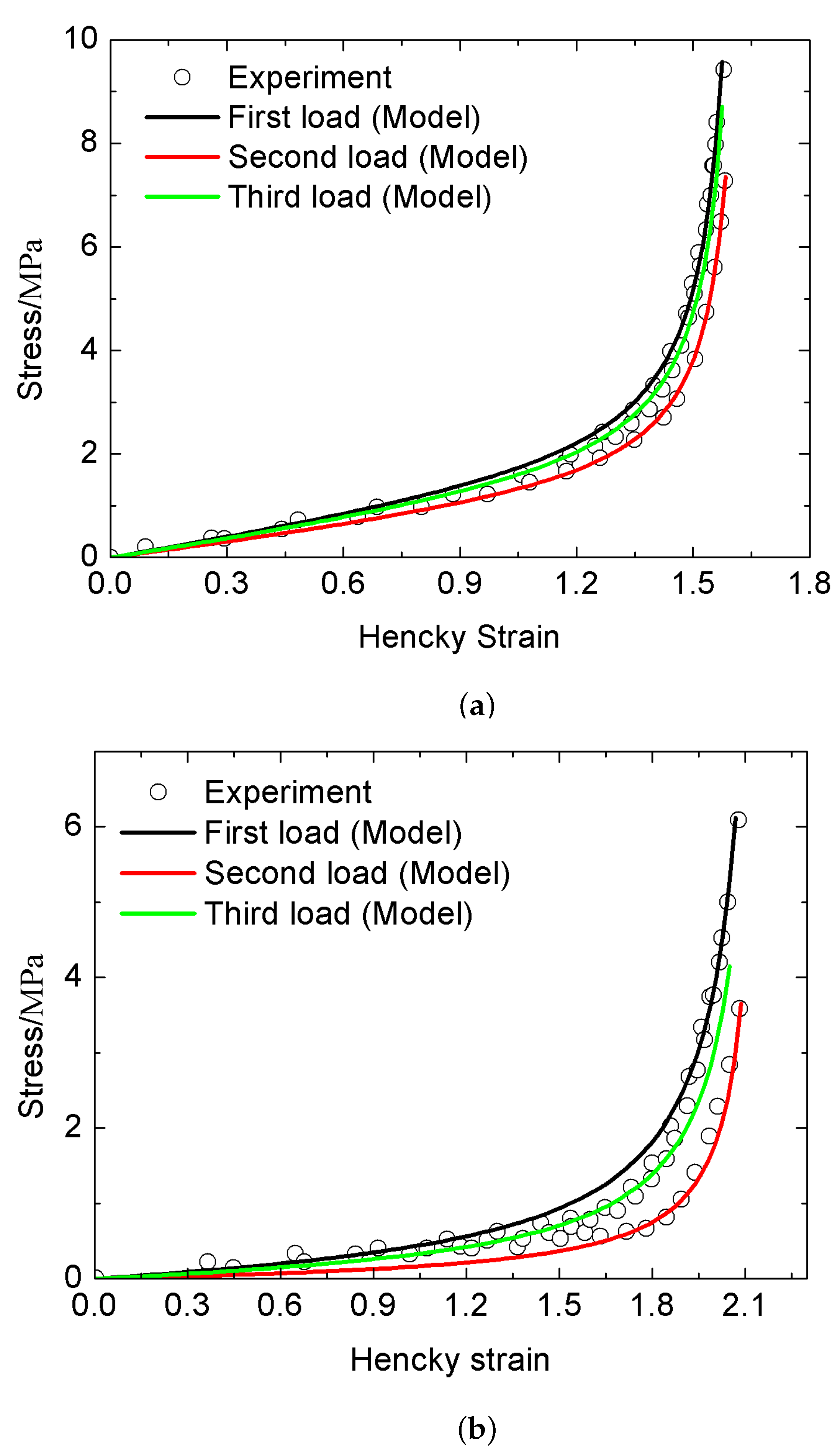
- A unified form should be given out to exactly match the test data under first loading, second loading, and third loading after thermal annealing.
2. New Potential
- One-dimensional potentials in three benchmark tests need to be derived from the their corresponding stress–strain relationships.
- Three specific invariants need to be introduced to capture the compressible condition, and to expand the one-dimensional potentials into a unified, multi-axial potential.
- It needs to be proven that the new potential can automatically reduce to the one-dimensional case.
2.1. One-Dimensional Potentials
2.2. Specific Invariants
- is introduced to account for how the volume changes. If the rubber-like material is incompressible, we have .
- is introduced to bridge the one-dimensional case and the multi-axial case. becomes the Hencky strain h at the one-dimensional case.
- is introduced to combine the one-dimension potentials into a unified multi-axial potential. We separately have , 0, and 1 in the case of uniaxial compression, plane strain, and uniaxial tension.
2.3. Compressible Multi-Axial Potential
2.4. Predictions for One-Dimensional Cases
3. Thermodynamic Consistency
4. Shape Functions with Stress Softening and Thermal Recovery
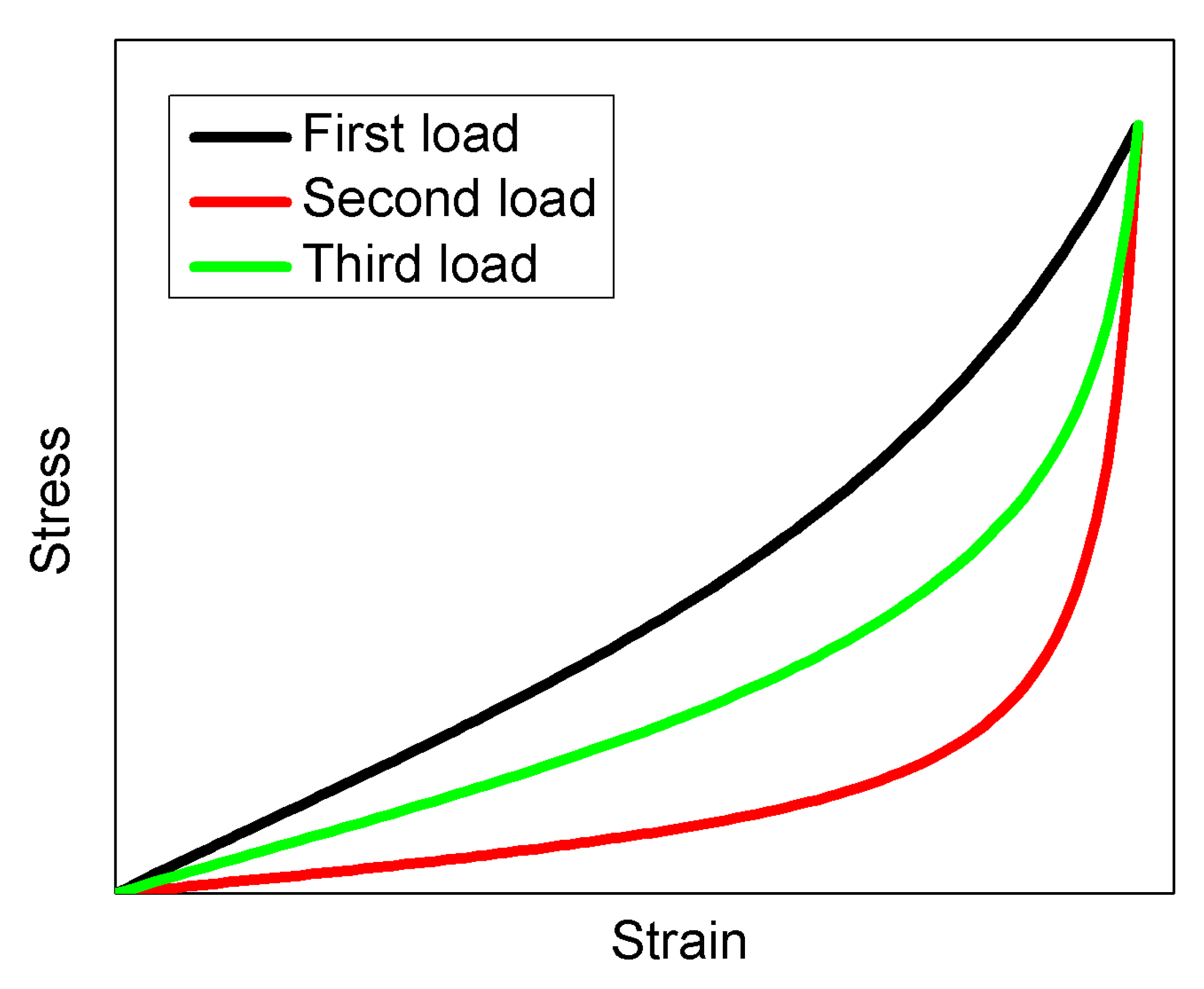
- When , , the shape functions become , , , and , which means that the stress–strain curve moves along the black line on the virgin specimen.
- When , , the shape functions become , , , and , which means the stress–strain curve moves along the red line for the specimen with stress softening.
- The weight factors , in the range from 0 to 1 represent the percentage of recovery, which means the larger the weight factor, the higher the percentage of recovery of the Mullins effect.
5. Numerical Results
5.1. Explicit Shape Functions via Rational Interpolation
5.2. Results for the Benchmark Tests
5.3. Results for Tests with Stress Softening and Thermal Recovery
- The parameters , , , and , are determined by the first load curve.
- The appropriate parameters of m, and in Equation (49) are given to determined the value of using the unloading stress in the test.
- The values for the parameter functions of , , , and are determined by the second load curve. Conversely, formulations of these parameter functions can be deduced by the method of interpolation with the initial values of , , , and , respectively.
- The weight factors , in each sample can be determined by the third load curve.
6. Concluding Remarks
- (1)
- The specific invariant is introduced to account for the general compressible deformation mode. Actually, the compressible condition can not be ignored under some deformation modes, such as the hydrostatic pressure. Additionally, the constraint of incompressibility may also give rise to convergence problems in finite element code, as shown in Biscoff et al. [38]. Therefore, it is necessary to establish a new model considering compressible deformation.
- (2)
- The new model is multi-axial and can fit all of the three benchmark tests, i.e., uniaxial, equal-biaxial, and plane strain, by introducing another two invariants of and .
- (3)
- (4)
- All of the parameters in the new model are explicitly decided, instead of being implicitly provided via complex iterative calculation.
- (5)
- Both stress softening and thermal recovery can be accounted for in the new model by the dissipation energy and the weight factors , .
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mullins, L. Effect of stretching on the properties of rubber. J. Rubber. Res. 1948, 21, 281–300. [Google Scholar] [CrossRef]
- Mullins, L. Softening of rubber by deformation. Rubber Chem. Technol. 1969, 42, 339–362. [Google Scholar] [CrossRef]
- Mullins, L.; Tobin, N.R. Theoretical model for the elastic behaviour of filler-reinforced vulcanized rubbers. Rubber Chem. Technol. 1957, 30, 551–571. [Google Scholar] [CrossRef]
- Qi, H.J.; Boyce, M.C. Constitutive model for stretch-induced softening of the stress-stretch behavior of elastomeric. J. Mech. Phys. Solids 2004, 52, 2187–2205. [Google Scholar] [CrossRef]
- Arruda, E.M.; Boyce, M.C. A three-dimensional constitutive model for the large stretch behavior of elastomers. J. Mech. Phys. Solids 1993, 41, 389–412. [Google Scholar] [CrossRef]
- Miehe, C.; Keck, J. Superimposed fnite elastic-viscoelastic-plastoelastic response with damage in filled rubbery polymers. Experiments, modeling and algorithmic implementation. J. Mech. Phys. Solids 2000, 48, 323–365. [Google Scholar] [CrossRef]
- Simo, J.C. On a fully three-dimensional finite-strain viscoelastic damage model: Formulation and computational aspects. Comput. Methods Appl. Mech. Engrg. 1987, 60, 153–173. [Google Scholar] [CrossRef]
- Kachanov, L.M. Time of the rupture process under creep conditions, Izy Akad. Nauk. Ssr Otd Tekh Nauk. 1958, 58, 26–31. [Google Scholar]
- Li, J.; Mayau, D.; Lagarrigue, V. A constitutive model dealing with damage due to cavity growth and the Mullins effect in rubber-like materials under triaxial loading. J. Mech. Phys. Solids 2008, 56, 953–973. [Google Scholar] [CrossRef]
- Beatty, M.F.; Krishnaswamy, S. A theory of stress-softening in incompressible isotropic materials. J. Mech. Phys. Solids 2000, 48, 1931–1965. [Google Scholar] [CrossRef]
- Laiarinandrasana, L.; Piques, R.; Robisson, A. Visco-hyperelastic model with internal state variable coupled with discontinuous damage concept under total Lagrangian formulation. Int. J. Plast. 2003, 19, 977–1000. [Google Scholar] [CrossRef]
- Dorfmann, A.; Ogden, R.W. A constitutive model for the Mullins effect with permanent set in particle-reinforced rubber. Int. J. Solids Struct. 2004, 41, 1855–1878. [Google Scholar] [CrossRef]
- Ogden, R.W.; Roxburgh, D.G. A pseudo-elastic model for the Mullins effect in filled rubber. Proc. R Soc. Lond A 1999, 455, 2861–2877. [Google Scholar] [CrossRef]
- Horgan, C.O.; Ogden, R.W.; Saccomandi, G. A theory of stress softening of elastomers based on finite chain extensibility. Proc. R Soc. Lond A 2004, 460, 1737–1754. [Google Scholar] [CrossRef]
- Sreejith, P.; Kannan, K.; Rajagopal, K.R. A thermodynamic framework for additive manufacturing, using amorphous polymers, capable of predicting residual stress, warpage and shrinkage. Int. J. Eng. Sci. 2021, 159, 103412. [Google Scholar] [CrossRef]
- Trentadue, F.; De Tommasi, D.; Puglisi, G. A predictive micromechanically-based model for damage and permanent deformations in copolymer sutures. J. Mech. Behav. Biomed. Mater. 2021, 115, 104277. [Google Scholar] [CrossRef]
- Fazekas, B.; Goda, T.J. Constitutive modelling of rubbers: Mullins effect, residual strain, time-temperature dependence. Int. J. Mech. Sci. 2021, 210, 106735. [Google Scholar] [CrossRef]
- Rigbi, Z. Reinforcement of rubber by carbon black. Prop. Polym. 1980, 55, 21–68. [Google Scholar]
- Laraba-Abbes, F.; Ienny, P.; Piques, R. A new ’tailor-made’ methodology for the mechanical behaviour analysis of rubber-like materials: II. application to the hyperelastic behaviour characterization of a carbon-black filled natural rubber vulcanizate. Polymer 2003, 44, 821–840. [Google Scholar] [CrossRef]
- Yan, L.; Dillard, D.A.; West, R.L.; Lower, L.D.; Gordon, G.V. Mullins effect recovery of a nanoparticle-filled polymer. J. Polym. Sci. Part Polym. Physics 2010, 48, 2208–2214. [Google Scholar] [CrossRef]
- Harwood, J.; Payne, A. Stress softening in natural rubber vulcanizates. iv. unfilled vulcanizates. Rubber Chem. Technol. 1967, 40, 840–848. [Google Scholar] [CrossRef]
- Hanson, D.E.; Hawley, M.; Houlton, R.; Chitanvis, K.; Rae, P.; Orler, E.B.; Wrobleski, D.A. Stress softening experiments in silica-filled polydimethylsiloxane provide insight into a mechanism for the Mullins effect. Polymer 2005, 46, 10989–10995. [Google Scholar] [CrossRef]
- Drozdov, A.D.; Dorfmann, A. Stress-softening and recovery of elastomers. arXiv 2001, arXiv:0102052. [Google Scholar]
- Wang, S.L.; Chester, S.A. Modeling thermal recovery of the Mullins effect. Mech. Mater. 2018, 126, 88–98. [Google Scholar] [CrossRef]
- Xiao, H. An explicit, direct approach to obtaining multi-axial elastic potentials that exactly match data of four benchmark tests for rubberlike materials-part 1: Incompressible deformations. Acta Mech. 2012, 223, 2039–2063. [Google Scholar] [CrossRef]
- Xiao, H. An explicit, direct approach to obtain multi-axial elastic potentials which accurately match data of four benchmark tests for rubbery materials part 2: General deformations. Acta Mech. 2013, 224, 479–498. [Google Scholar] [CrossRef]
- Wang, X.M.; Li, H.; Yin, Z.N.; Xiao, H. Multiaxial strain energy functions of rubberlike materials: An explicit approach based on polynomial interpolation. Rubber Chem. Technol. 2014, 87, 168–183. [Google Scholar] [CrossRef]
- Yuan, L.; Gu, Z.X.; Yin, Z.N.; Xiao, H. New compressible hyperelastic models for rubberlike matereials. Acta Mech. 2015, 226, 4059–4072. [Google Scholar] [CrossRef]
- Xiao, H.; Ding, X.F.; Cao, J.; Yin, Z.N. New multi-axial constitutive models for large elastic deformation behaviors of soft solids up to breaking. Int. J. Solids Struct. 2017, 109, 123–130. [Google Scholar] [CrossRef]
- Fitzjerald, S. A tensorial Hencky measure of strain and strain rate for finite deformation. J. Appl. Phys. 1980, 51, 5111–5115. [Google Scholar] [CrossRef]
- Xiao, H. Hencky strain and Hencky model: Extending history and ongoing tradition. Multidiscip. Model. Mater. Struct. 2005, 1, 1–52. [Google Scholar] [CrossRef]
- Hill, R. Constitutive inequalities for isotropic elastic solids under finite strain. Proc. R. Soc. Lond. A 1970, 326, 131–147. [Google Scholar]
- Xiao, H.; Bruhns, O.T.; Meyers, A. Thermodynamic laws and consistent Eulerian formulation of finite elastoplasticity with thermal effects. J. Mech. Phys. Solids 2007, 55, 338–365. [Google Scholar] [CrossRef]
- Diani, J.; Brieu, M.; Vacherand, J.M. A damage directional constitutive model for Mullins effect with permanent set and induced anisotropy. Eur. J. Mech. A/Solids 2006, 25, 483–496. [Google Scholar] [CrossRef]
- Treloar, L.R.G. The Physics of Rubber Elasticity; Oxford University Press: Oxford, UK, 1975. [Google Scholar]
- Jones, D.F.; Treloar, L.R.G. The properties of rubber in pure homogeneous strain. J. Phys. D 1975, 8, 1285–1304. [Google Scholar] [CrossRef]
- Yohsuke, B.; Urayama, K.; Takigawa, T.; Ito, K. Biaxial strain testing of extremely soft polymer gels. Soft Matter 2011, 7, 2632–2638. [Google Scholar] [CrossRef]
- Biscoff, J.E.; Arrude, E.M.; Grosh, K.A. A new constitutive model for the compressibility of elastomers at finite deformation. Rubber Chem. Technol. 2001, 74, 541–559. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition | Symbol | Definition |
|---|---|---|---|
| Deformation gradient | Left Cauchy–Green tension | ||
| Kirchhoff Stress | Cauchy–Green tension | ||
| J | Volumetirc ratio | Poisson ratio | |
| W | Potential | Hencky strain | |
| Deriatoric Hencky strain | Second-order identity tensor | ||
| T | Temperature | Stretching | |
| Internal energy per unit | Heat flowing | ||
| r | Heat supply | Specific entropy | |
| Helmholtz free energy | ℘ | Internal dissipation |
| Quantity | Uniaxial t/c | Biaxial t/c | Plane Strain |
|---|---|---|---|
| 1/−1 | −1/1 | 0 |
| Quantity | Uniaxial t/c | Biaxial t/c | Plane Strain |
|---|---|---|---|
| W | |||
| J | |||
| and |
| Experiment | MPa | |||||||
|---|---|---|---|---|---|---|---|---|
| Treloar [35] | 1 | 2 | / | |||||
| Jones and Treloar [36] | 3 | 13 | ||||||
| Yohsuke et al. [37] | 2 | 5 |
| Vulcanizates | MPa | |||
|---|---|---|---|---|
| sulfur | 10 | |||
| sulfur | 10 | |||
| sulfur | 10 |
| Vulcanizates | MPa | |||
|---|---|---|---|---|
| sulfur | 10 | |||
| sulfur | 10 | |||
| sulfur | 10 |
| Vulcanizates | MPa | |||
|---|---|---|---|---|
| dicup | 10 | |||
| dicup | 10 |
| Vulcanizates | m | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| sulfur | 10 | ||||||||
| sulfur | 10 | ||||||||
| sulfur | 10 |
| Vulcanizates | m | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| sulfur | 10 | ||||||||
| sulfur | 10 | ||||||||
| sulfur | 10 |
| Vulcanizates | m | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| dicup | 10 | ||||||||
| dicup | 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Xiao, H.; Lu, S. Explicitly Modeling Stress Softening and Thermal Recovery for Rubber-like Materials. Symmetry 2022, 14, 2663. https://doi.org/10.3390/sym14122663
Wang X, Xiao H, Lu S. Explicitly Modeling Stress Softening and Thermal Recovery for Rubber-like Materials. Symmetry. 2022; 14(12):2663. https://doi.org/10.3390/sym14122663
Chicago/Turabian StyleWang, Xiaoming, Heng Xiao, and Shengliang Lu. 2022. "Explicitly Modeling Stress Softening and Thermal Recovery for Rubber-like Materials" Symmetry 14, no. 12: 2663. https://doi.org/10.3390/sym14122663
APA StyleWang, X., Xiao, H., & Lu, S. (2022). Explicitly Modeling Stress Softening and Thermal Recovery for Rubber-like Materials. Symmetry, 14(12), 2663. https://doi.org/10.3390/sym14122663