

Transient Propagation of Longitudinal and Transverse Waves in Cancellous Bone: Application of Biot Theory and Fractional Calculus


 ,
,  ,
,  and
and
Abstract
1. Introduction
2. Modified Biot Theory
3. Temporal Formulation of the Modified Biot Theory
3.1. Solution of the Motion Equations
3.1.1. Longitudinal Waves
3.1.2. Transverse Wave
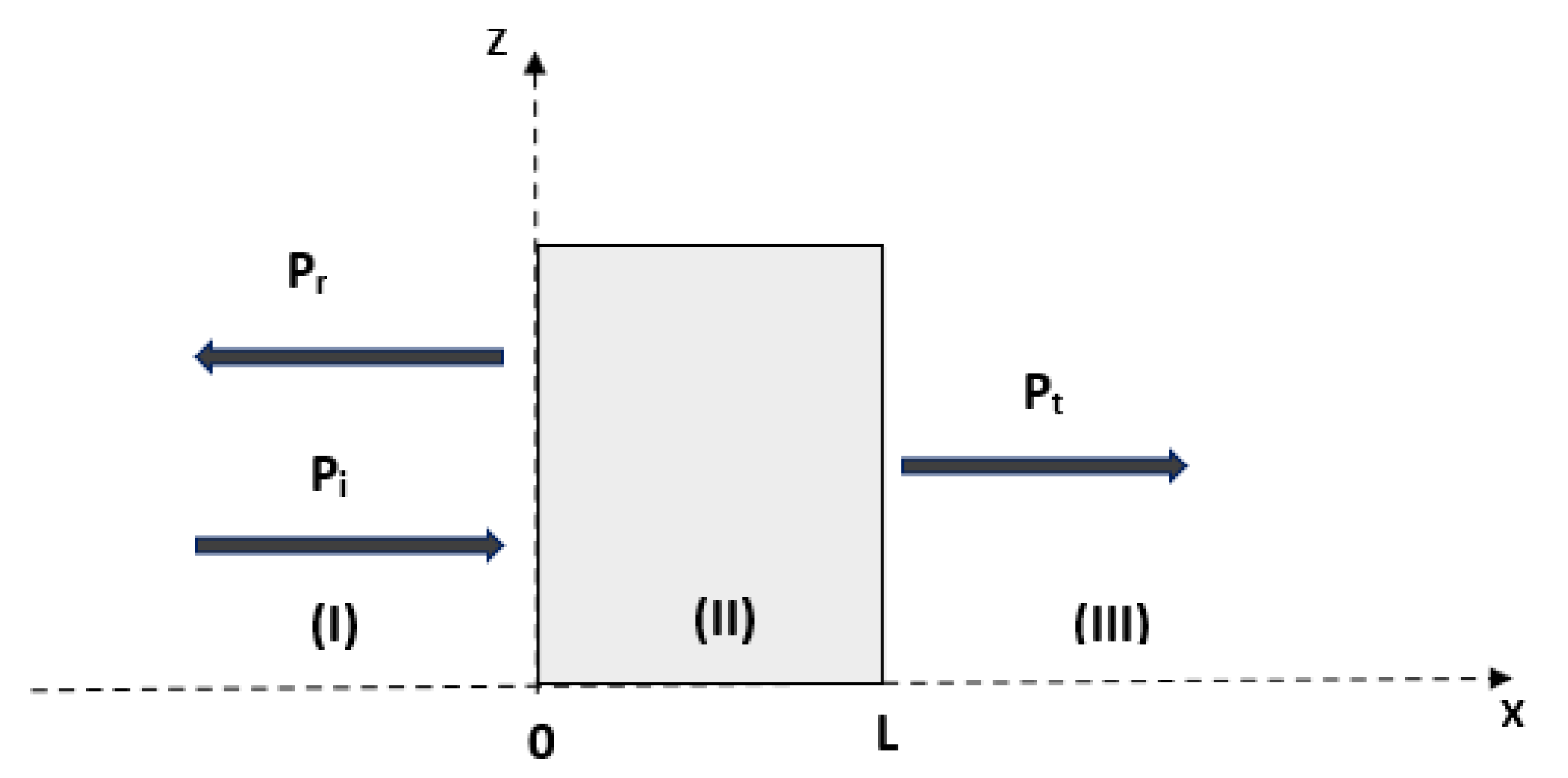
4. The Scattering Operators
5. Numerical Validation
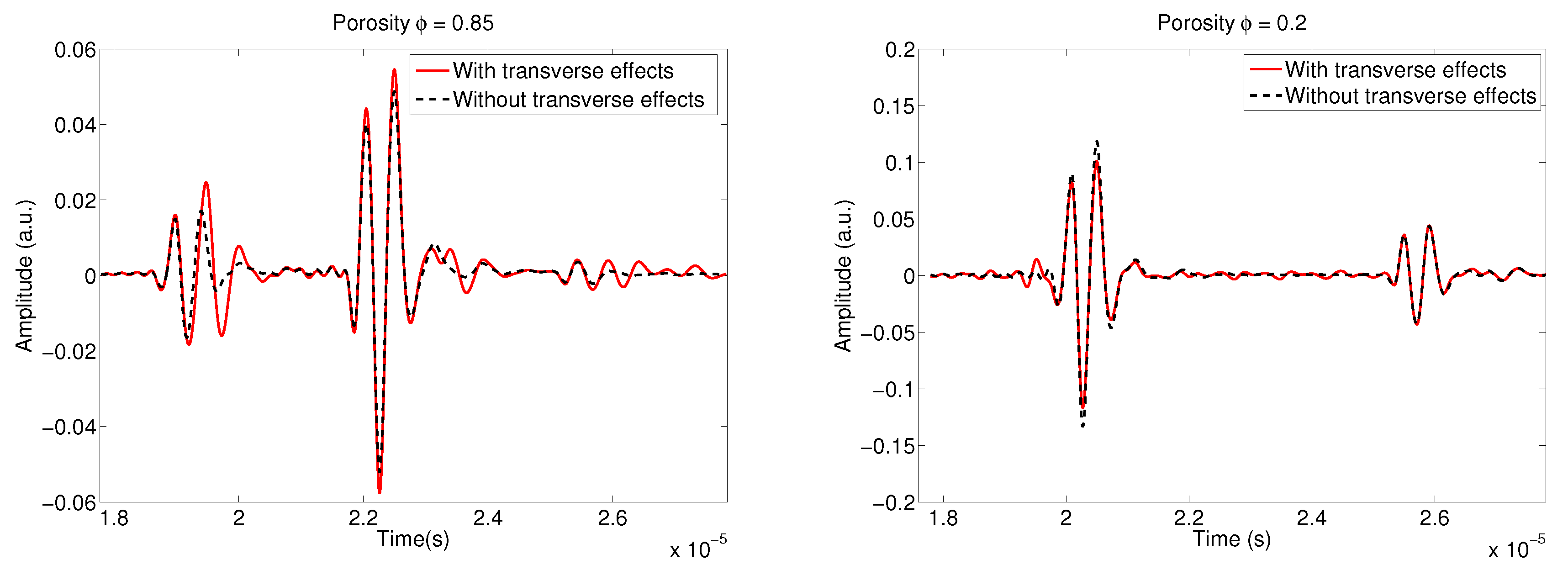
5.1. Porosity Variation
5.2. Tortuosity Variation
5.3. Variation of the Viscous Characteristic Length
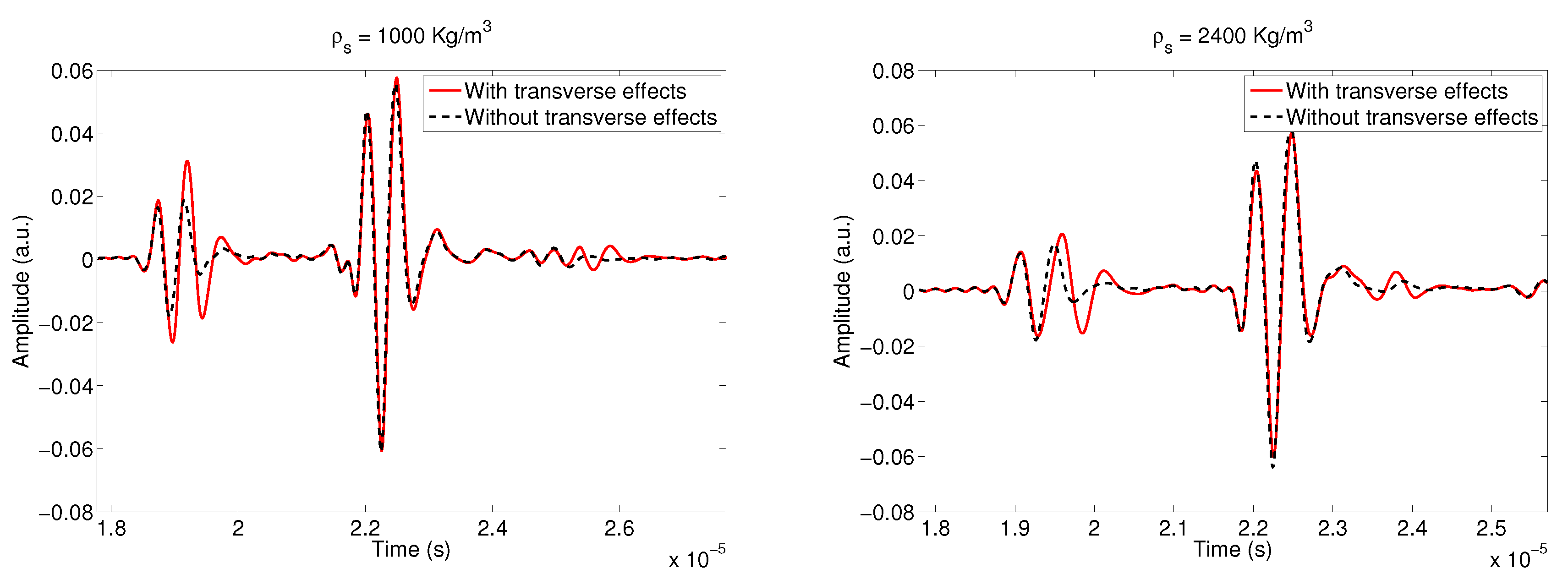
5.4. Solid Density Variation
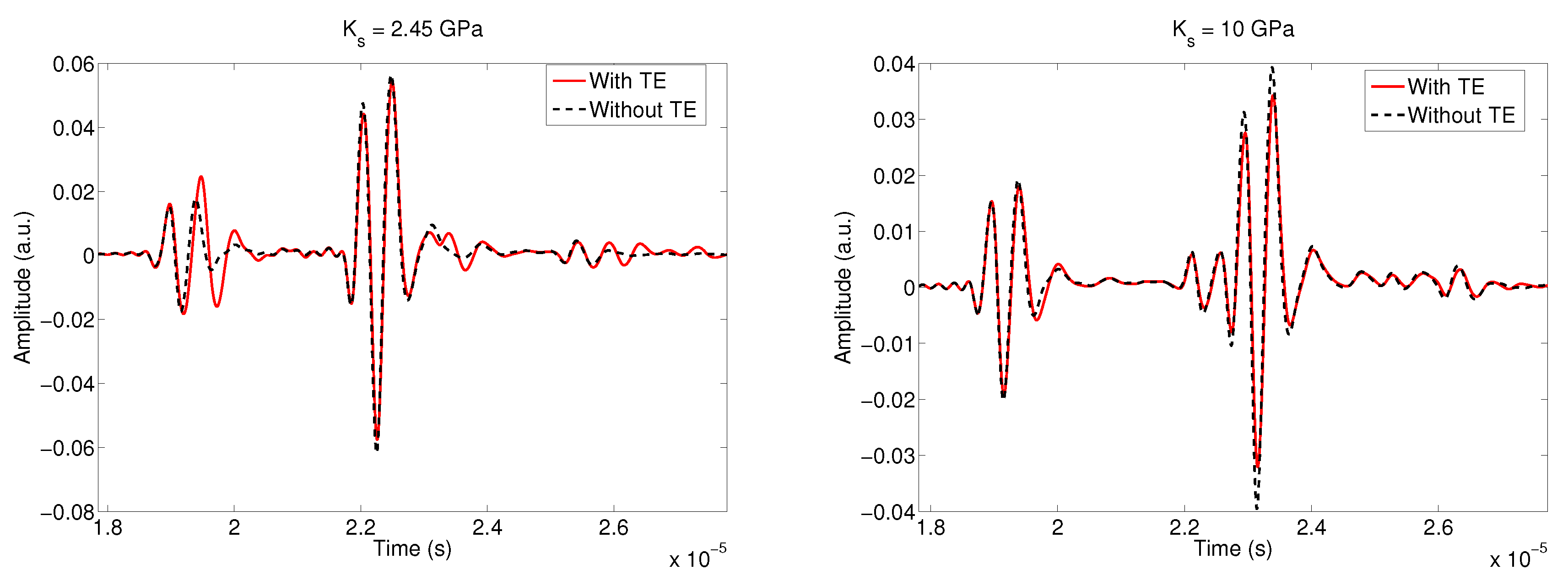
5.5. Bulk Modulus of the Elastic Solid K Variation
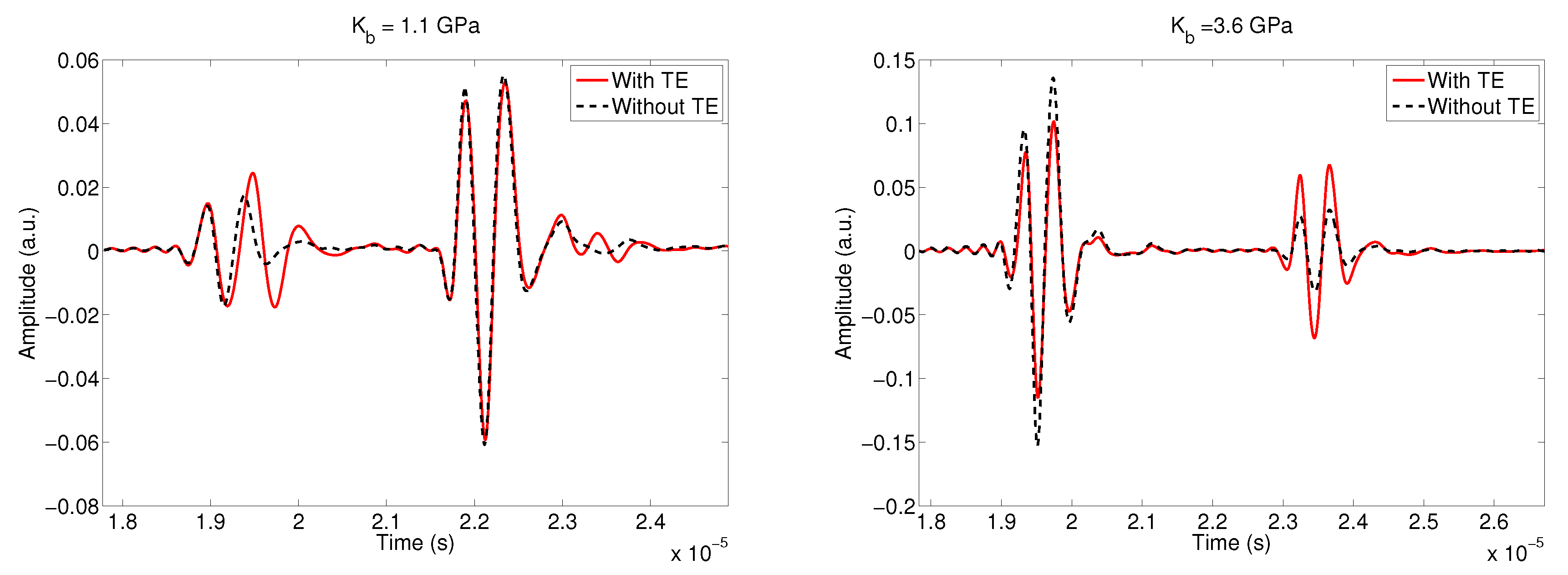
5.6. Bulk Modulus of the Porous Skeletal Frame K Variation
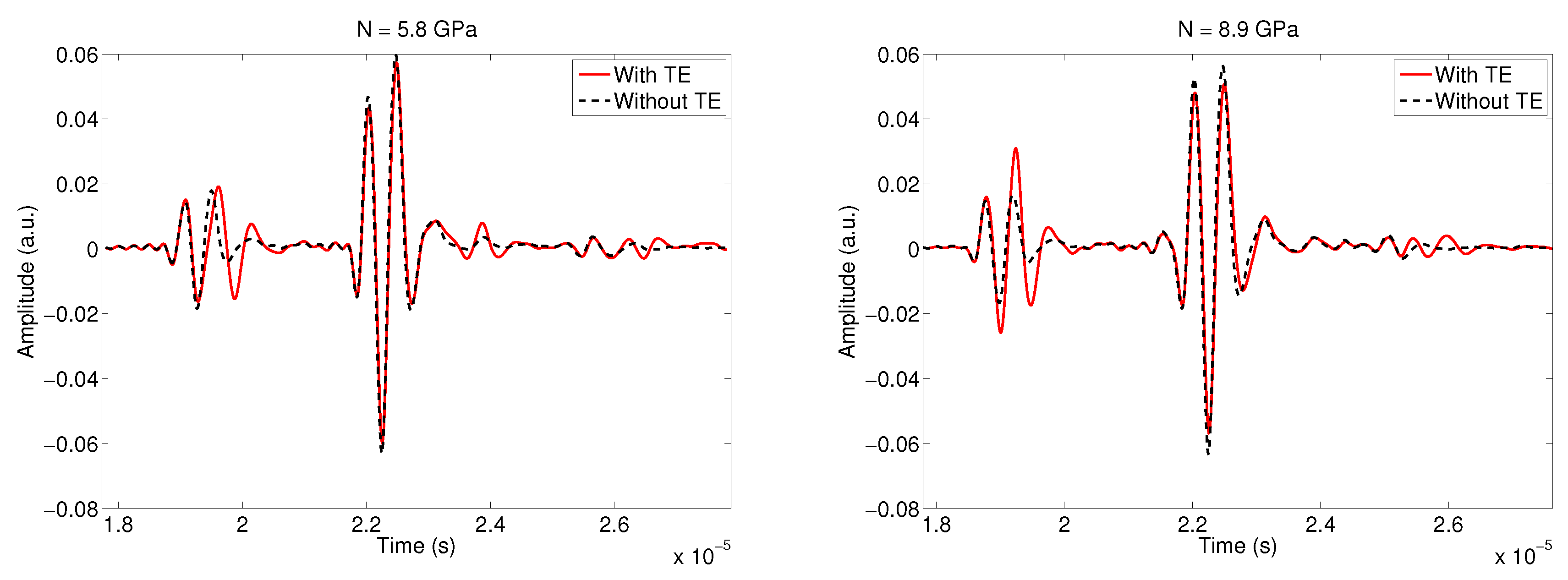
5.7. The Shear Modulus N Variation
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. The Eigenvalues and Eigenvectors of the Matrix M
Appendix B. Scalar Functions
Appendix C. The Scattering Operators in the Time Domain
Appendix D. Green Functions of Longitudinal and Transverse Waves
References
- Osterhoff, G.; Morgan, E.F.; Shefelbine, S.J.; Karim, L.; McNamara, L.M.; Augat, P. Bone mechanical properties and changes with osteoporosis. Injury 2016, 47, S11–S20. [Google Scholar] [CrossRef]
- Cummings, S.R.; Browner, W.; Black, D.M.; Nevitt, M.C.; Browner, W.; Genant, H.K.; Cauley, J.; Ensrud, K.; Scott, J.; Vogt, T.M. Bone density at various sites for prediction of hip fractures. Lancet 1993, 341, 72–75. [Google Scholar] [CrossRef]
- Hui, S.L.; Slemenda, C.W.; Johnston, C. Baseline Measurement of Bone Mass Predicts Fracture in White Women. Ann. Intern. Med. 1989, 111, 355–361. [Google Scholar] [CrossRef] [PubMed]
- Stegman, M.; Recker, R.R.; Davies, K.; Ryan, R.; Heaney, R. Fracture risk as determined by prospective and retrospective study designs. Osteoporos. Int. 1992, 2, 290–297. [Google Scholar] [CrossRef]
- Wang, E.; Carcione, J.M.; Cavallini, F. Generalized Thermo-poroelasticity Equations and Wave Simulation. Surv. Geophys. 2021, 42, 133–157. [Google Scholar] [CrossRef]
- Abbas, I.; Hobiny, A. The thermomechanical response of a poroelastic medium with two thermal relaxation times. Multidiscip. Model. Mater. Struct. 2021, 17, 493–506. [Google Scholar] [CrossRef]
- Saeed, T.; Abbas, I.; Marin, M. A GL Model on Thermo-Elastic Interaction in a Poroelastic Material Using Finite Element Method. Symmetry 2020, 12, 488. [Google Scholar] [CrossRef]
- Saeed, T. A Study on Thermoelastic Interaction in a Poroelastic Medium with and without Energy Dissipation. Mathematics 2020, 8, 1286. [Google Scholar] [CrossRef]
- Alzahrani, F.; Abbas, I.A. Generalized Thermoelastic Interactions in a Poroelastic Material Without Energy Dissipations. Int. J. Thermophys. 2020, 41, 95. [Google Scholar] [CrossRef]
- Yousefian, O.; White, R.D.; Karbalaeisadegh, Y.; Banks, H.T.; Muller, M. The effect of pore size and density on ultrasonic attenuation in porous structures with mono-disperse random pore distribution: A two dimensional in-silico Study. J. Acoust. Soc. Am. 2018, 144, 709–719. [Google Scholar] [CrossRef]
- Fry, F.J.; Barger, J.E. Acoustical properties of the humain skull. J. Acoust. Soc. Am. 1978, 63, 1576–1590. [Google Scholar] [CrossRef]
- Ashman, R.B.; Corin, J.D.; Turner, C.H. Elastic properties of cancellous bone: Measurement by an ultrasonic technique. J. Biomech. 1987, 20, 979–989. [Google Scholar] [CrossRef]
- Ashman, R.B.; Rho, J.Y. Elastic modulus of trabecular bone material. J. Biomech. 1988, 21, 177–181. [Google Scholar] [CrossRef]
- Hosokawa, A.; Otani, T. Ultrasonic wave propagation in bovine cancellous bone. J. Acoust. Soc. Am. 1997, 101, 558–562. [Google Scholar] [CrossRef]
- Hosokawa, A.; Otani, T. Acoustic anisotropy in bovine cancellous bone. J. Acoust. Soc. Am. 1998, 103, 2718–2722. [Google Scholar] [CrossRef]
- Haire, T.J.; Langton, C.M. Biot theory: A review of its application on ultrasound propagation through cancellous bone. Bone 1999, 24, 291–295. [Google Scholar] [CrossRef]
- Cardoso, L.; Teboul, F.; Sedel, L.; Meunier, A.; Oddou, C. In vitro acoustic waves propagation in human and bovine cancellous bone. J. Bone Miner. Res. 2003, 18, 1803–1812. [Google Scholar] [CrossRef]
- Cardoso, L.; Cowin, S.C. Fabric dependence of quasi-waves in anisotropic porous media. J. Acoust. Soc. Am. 2011, 129, 3302–3316. [Google Scholar] [CrossRef]
- Fellah, Z.E.A.; Chapelon, J.Y.; Berger, S.; Lauriks, W.; Depollier, C. Ultrasonic wave propagation in human cancellous bone: Application of Biot theory. J. Acoust. Soc. Am. 2004, 116, 61–73. [Google Scholar] [CrossRef]
- Sebaa, N.; Fellah, Z.E.A.; Fellah, M.; Ogam, E.; Wirgin, A.; Mitri, F.G.; Depollier, C.; Lauriks, W. Ultrasonic characterization of human cancellous bone using the Biot theory: Inverse problem. J. Acoust. Soc. Am. 2006, 120, 1816–1824. [Google Scholar] [CrossRef]
- Marutyan, K.R.; Holland, M.R.; Miller, J.G. Anomalous negative dispersion in bone can result from the interference of fast and slow waves. J. Acoust. Soc. Am. 2006, 120, EL55–EL61. [Google Scholar] [CrossRef]
- Hughes, E.R.; Leighton, T.G.; White, P.R.; Petley, G.W. Investigation of an anisotropic tortuosity in a Biot model of ultrasonic propagation in cancellous bone. J. Acoust. Soc. Am. 2006, 121, 568–574. [Google Scholar] [CrossRef]
- Pakula, M.; Padilla, F.; Laugier, P.; Kaczmarek, M. Application of Biot’s theory to ultrasonic characterization of human cancellous bones: Determination of structural, material, and mechanical properties. J. Acoust. Soc. Am. 2008, 123, 2415–2423. [Google Scholar] [CrossRef]
- Anderson, C.C.; Marutyan, K.R.; Holland, M.R.; Wear, K.A.; Miller, J.G. Interference between wave modes may contribute to the apparent negative dispersion observed in cancellous bone. J. Acoust. Soc. Am. 2008, 124, 1781–1789. [Google Scholar] [CrossRef]
- Mizuno, K.; Matsukawa, M.; Otani, T.; Laugier, P.; Padilla, F. Propagation of two longitudinal waves in human cancellous bone: An in vitro study. J. Acoust. Soc. Am. 2009, 125, 3460–3466. [Google Scholar] [CrossRef]
- Wear, K.A. Cancellous bone analysis with modified least squares Prony’s method and chirp filter: Phantom experiments and simulation. J. Acoust. Soc. Am. 2010, 128, 2191–2203. [Google Scholar] [CrossRef]
- Nelson, A.M.; Hoffman, J.J.; Anderson, C.C.; Holland, M.R.; Nagatani, Y.; Mizuno, K.; Matsukawa, M.; Miller, J.G. Determination attenuation properties of interfering fast and slow ultrasonic waves in cancellous bone. J. Acoust. Soc. Am. 2011, 130, 2233–2239. [Google Scholar] [CrossRef]
- McKelvie, M.L. Ultrasonic Propagation in Cancellous Bone. Ph.D. Thesis, University of Hull, Hull, UK, 1988. [Google Scholar]
- Williams, J.L. Ultrasonic wave propagation in cancellous bone and cortical bone: Prediction of some experimental results by Biot’s theory. J. Acoust. Soc. Am. 1992, 91, 1106–1112. [Google Scholar] [CrossRef]
- Lauriks, W.; Thoen, J.; Asbroeck, I.V.; Lowet, G.; Vanderperre, G. Propagation of ultrasonic pulses through trabecular bone. J. Phys. Paris Colloq. 1994, 4, 1255–1258. [Google Scholar] [CrossRef]
- Mckelvie, M.L.; Palmer, S.B. The interaction of ultrasound with cancellous bone. Phys. Med. Biol. 1991, 10, 1331–1340. [Google Scholar] [CrossRef] [PubMed]
- Lakes, R.; Yoon, H.S.; Katz, J.L. Slow compressional wave propagation in wet human and bovine cortical bone. Science 1983, 220, 513–515. [Google Scholar] [CrossRef] [PubMed]
- Johnson, D.L.; Koplik, J.; Dashen, R. Theory of dynamic permeability and tortuosity in fluid-saturated porous media. J. Fluid Mech. 1987, 176, 379–402. [Google Scholar] [CrossRef]
- Buchanan, J.L.; Gilbert, R.P.; Ou, M.J. Transfer functions for a onedimensional fluid-poroelastic system subject to an ultrasonic pulse. Nonlinear Anal. Real World Appl. 2012, 13, 1030–1043. [Google Scholar] [CrossRef]
- Buchanan, J.L.; Gilbert, R.P.; Ou, M.Y. Recovery of the parameters of cancellous bone by inversion of effective velocities, and transmission and reflection coefficients. Inverse Probl. 2011, 27, 125006. [Google Scholar] [CrossRef][Green Version]
- Nguyen, V.H.; Naili, S.; Sansalone, V. A closed-form solution for in vitro transient ultrasonic wave propagation in cancellous bone. Mech. Res. Commun. 2010, 37, 377–383. [Google Scholar] [CrossRef]
- Jocker, J.; Smeulders, D. Ultrasonic measurements on poroelastic slabs: Determination of reflection and transmission coefficients and processing for Biot input parameters. Ultrasonics 2009, 49, 319–330. [Google Scholar] [CrossRef]
- Derible, S. Acoustical measurement of the bulk characteristics of a water saturated porous plate obeying Biot’s theory. Acta Acust. Acust. 2004, 90, 85–90. [Google Scholar]
- Wu, K.; Xue, Q.; Adler, L. Reflection and transmission of elastic waves from a fluid-saturated porous solid boundary. J. Acoust. Soc. Am. 1990, 87, 2349–2358. [Google Scholar] [CrossRef]
- Santos, J.E.; Corbero, J.M.; Ravazzoli, C.L.; Hensley, J.L. Reflection and transmission coefficients in fluid-saturated porous medium. J. Acoust. Soc. Am. 1992, 91, 1911–1923. [Google Scholar] [CrossRef]
- Johnson, D.L.; Plona, T.J.; Kojima, H. Probing porous media with first and second sound. II. Acoustic properties of water-saturated porous media. J. Appl. Phys. 1994, 76, 115–125. [Google Scholar] [CrossRef]
- Belhocine, F.; Derible, S.; Franklin, H. Transition term method for the analysis of the reflected and the transmitted acoustic signals from watersaturated porous plates. J. Acoust. Soc. Am. 2007, 122, 1518–1526. [Google Scholar] [CrossRef]
- Fellah, Z.E.A.; Depollier, C. Transient wave propagation in rigid porous media: A time domain approach. J. Acoust. Soc. Am. 2000, 107, 683–688. [Google Scholar] [CrossRef]
- Fellah, Z.E.A.; Wirgin, A.; Fellah, M.; Sebaa, N.; Depollier, C.; Lauriks, W. A time-domain model of transient acoustic wave propagation in double-layered porous media. J. Acoust. Soc. Am. 2005, 118, 661–670. [Google Scholar] [CrossRef]
- Umnova, O.; Turo, D. Time domain formulation of the equivalent fluid model for rigid porous media. J. Acoust. Soc. Am. 2009, 125, 1860–1863. [Google Scholar] [CrossRef]
- Szabo, T.L. Time domain wave equations for lossy media obeying a frequency power law. J. Acoust. Soc. Am. 1994, 96, 491–500. [Google Scholar] [CrossRef]
- Caviglia, G.; Morro, A. A closed-form solution for reflection and transmission of transient waves in multilayers. J. Acoust. Soc. Am. 2004, 116, 643–654. [Google Scholar] [CrossRef]
- Norton, G.V.; Novarini, J.C. Including dispersion and attenuation directly in the time domain for wave propagation in isotropic media. J. Acoust. Soc. Am. 2003, 113, 3024–3031. [Google Scholar] [CrossRef]
- Fellah, Z.E.A.; Fellah, M.; Lauriks, W.; Depollier, C. Direct and inverse scattering of transient acoustic waves by a slab of rigid porous material. J. Acoust. Soc. Am. 2003, 113, 61–71. [Google Scholar] [CrossRef]
- Moura, A. Causal analysis of transient viscoelastic wave propagation. J. Acoust. Soc. Am. 2006, 119, 751–755. [Google Scholar] [CrossRef]
- Wilson, D.K.; Ostashev, V.E.; Collier, S.L. Time domain equations for sound propagation in rigid-frame porous media. J. Acoust. Soc. Am. 2004, 116, 1889–1892. [Google Scholar] [CrossRef]
- Chen, W.; Holm, S. Modified Szabo’s wave equation models for lossy media obeying frequency power law. J. Acoust. Soc. Am. 2003, 114, 2570–2574. [Google Scholar] [CrossRef] [PubMed]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; John Willey & Sons, Inc.: New York, NY, USA, 1993. [Google Scholar]
- Oldham, K.B.; Spanier, J. The Fractional Calculus; Academic Press: New York, NY, USA, 1974. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Serie: Mathematics in Science and Engineering no 198; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives Theory and Applications; Gordon and Breach Publishers: Amsterdam, The Netherlands, 1993. [Google Scholar]
- Caputo, M. Linear models of dissipation whose Q is almost frequency independant. Ann. Geofis. 1966, 19, 383–393. [Google Scholar]
- Caputo, M. Linear models of dissipation whose Q is almost frequency independant, Part II. Geophys. J. R. Astron. Soc. 1967, 13, 529–539. [Google Scholar] [CrossRef]
- Caputo, M.; Mainardi, F. Linear models of dissipation in anelastic solids. Riv. Nuovo Cimento (Ser. II) 1971, 1, 161–198. [Google Scholar] [CrossRef]
- Bagley, R.L.; Torvik, P.J. On the fractional calculus model of viscoelastic behavior. J. Rheol. 1983, 30, 133–155. [Google Scholar] [CrossRef]
- Matignon, D. Représentations en Variables d’état de Modèles de Guides d’ondes avec Dérivation Fractionnaire. Ph.D. Thesis, L’Universite Paris XI, Orsay, France, 1994. [Google Scholar]
- Fellah, M.; Fellah, Z.E.A.; Mitri, F.; Ogam, E.; Depollier, C. Transient ultrasound propagation in porous media using Biot theory and fractional calculus: Application to human cancellous bone. J. Acoust. Soc. Am. 2013, 133, 1867–1881. [Google Scholar] [CrossRef]
- Fellah, M.; Fellah, Z.E.A.; Ongwen, N.; Ogam, E.; Depollier, C. Acoustics of fractal porous material and fractional calculus. Mathematics 2021, 9, 1774. [Google Scholar] [CrossRef]
- Fellah, Z.E.A.; Fellah, M.; Roncen, R.; Ongwen, N.O.; Ogam, E.; Depollier, C. Transient Propagation of Spherical Waves in Porous Material: Application of Fractional Calculus. Symmetry 2022, 14, 233. [Google Scholar] [CrossRef]
- Fellah, Z.E.A.; Depollier, C.; Fellah, M. Direct and inverse scattering problem in porous material having a rigid frame by fractional calculus based method. J. Sound. Vib. 2001, 244, 3659. [Google Scholar] [CrossRef]
- Hodaei, M.; Maghoul, P.; Popplewell, N. An overview of the acoustic studies of bone-like porous materials, and the effect of transverse acoustic waves. Int. Eng. Sci. 2020, 147, 103189. [Google Scholar] [CrossRef]
- Ogam, E.; Fellah, Z.E.A.; Ogam, G.; Ongwen, N.O.; Oduor, A.O. Investigation of long acoustic waveguides for the very low frequency characterization of monolayer and stratified air-saturated poroelastic materials. Appl. Acoust. 2021, 182, 108200. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | L (mm) | (m) | Kg/m | (GPa) | (GPa) | N (GPa) | ||
|---|---|---|---|---|---|---|---|---|
| Bone (S1) | 0.7 | 0.85 | 1.3 | 8 | 1960 | 2.45 | 1 | 6.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benmorsli, D.; Fellah, Z.E.A.; Belgroune, D.; Ongwen, N.O.; Ogam, E.; Depollier, C.; Fellah, M. Transient Propagation of Longitudinal and Transverse Waves in Cancellous Bone: Application of Biot Theory and Fractional Calculus. Symmetry 2022, 14, 1971. https://doi.org/10.3390/sym14101971
Benmorsli D, Fellah ZEA, Belgroune D, Ongwen NO, Ogam E, Depollier C, Fellah M. Transient Propagation of Longitudinal and Transverse Waves in Cancellous Bone: Application of Biot Theory and Fractional Calculus. Symmetry. 2022; 14(10):1971. https://doi.org/10.3390/sym14101971
Chicago/Turabian StyleBenmorsli, Djihane, Zine El Abiddine Fellah, Djema Belgroune, Nicholas O. Ongwen, Erick Ogam, Claude Depollier, and Mohamed Fellah. 2022. "Transient Propagation of Longitudinal and Transverse Waves in Cancellous Bone: Application of Biot Theory and Fractional Calculus" Symmetry 14, no. 10: 1971. https://doi.org/10.3390/sym14101971
APA StyleBenmorsli, D., Fellah, Z. E. A., Belgroune, D., Ongwen, N. O., Ogam, E., Depollier, C., & Fellah, M. (2022). Transient Propagation of Longitudinal and Transverse Waves in Cancellous Bone: Application of Biot Theory and Fractional Calculus. Symmetry, 14(10), 1971. https://doi.org/10.3390/sym14101971