
Research on Projection Filtering Method Based on Projection Symmetric Interval and Its Application in Underwater Navigation


Abstract
:1. Introduction
2. Background and Problem Formulation
2.1. State Estimation Model in NLSs
2.2. Probability Solution of State Estimation Problem
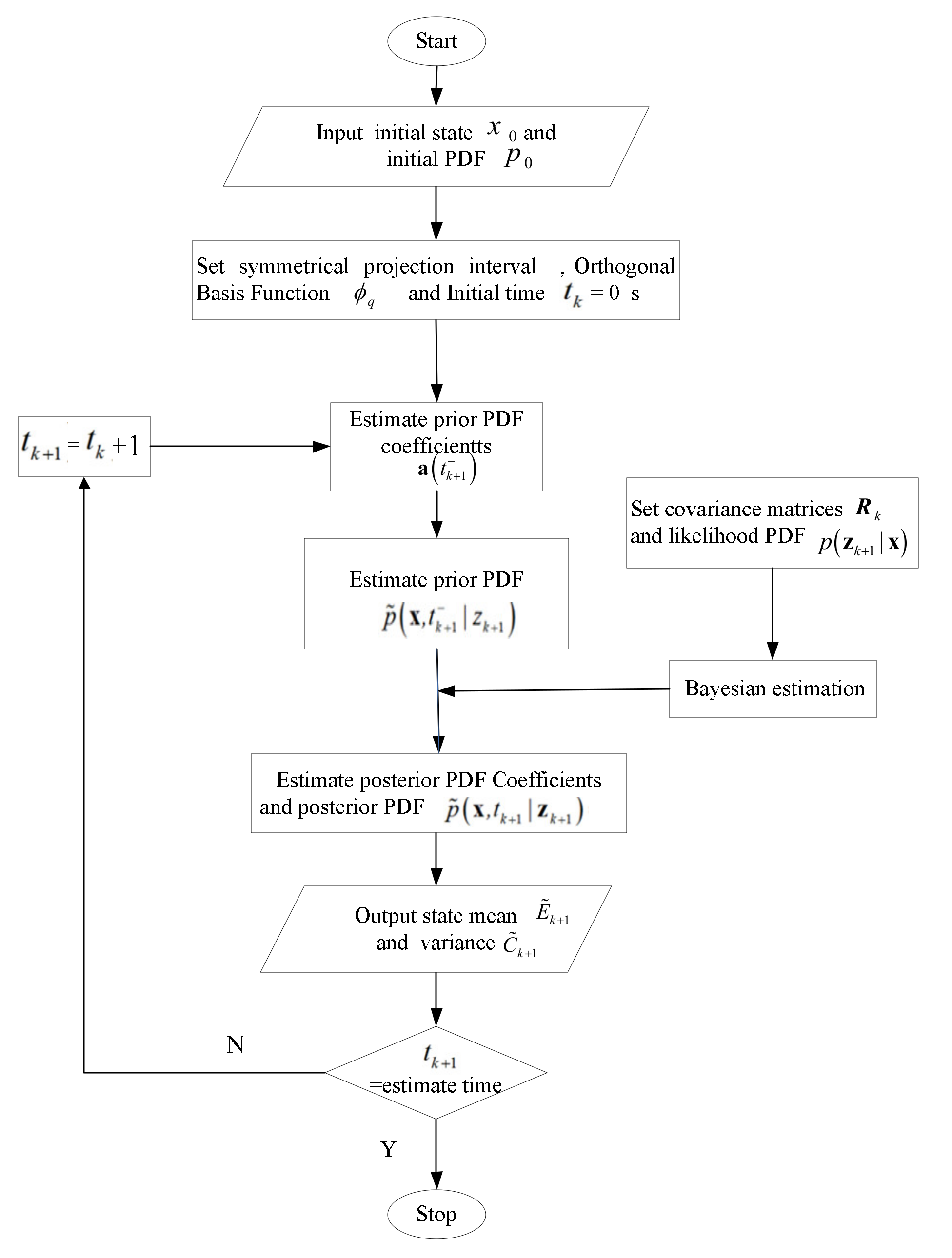
3. Nonlinear Filter Estimator Design-Based Projection Filter Method
3.1. Status Update
3.2. Measurement Update
3.3. Selecting Basis Function Based on Projection Symmetric Interval
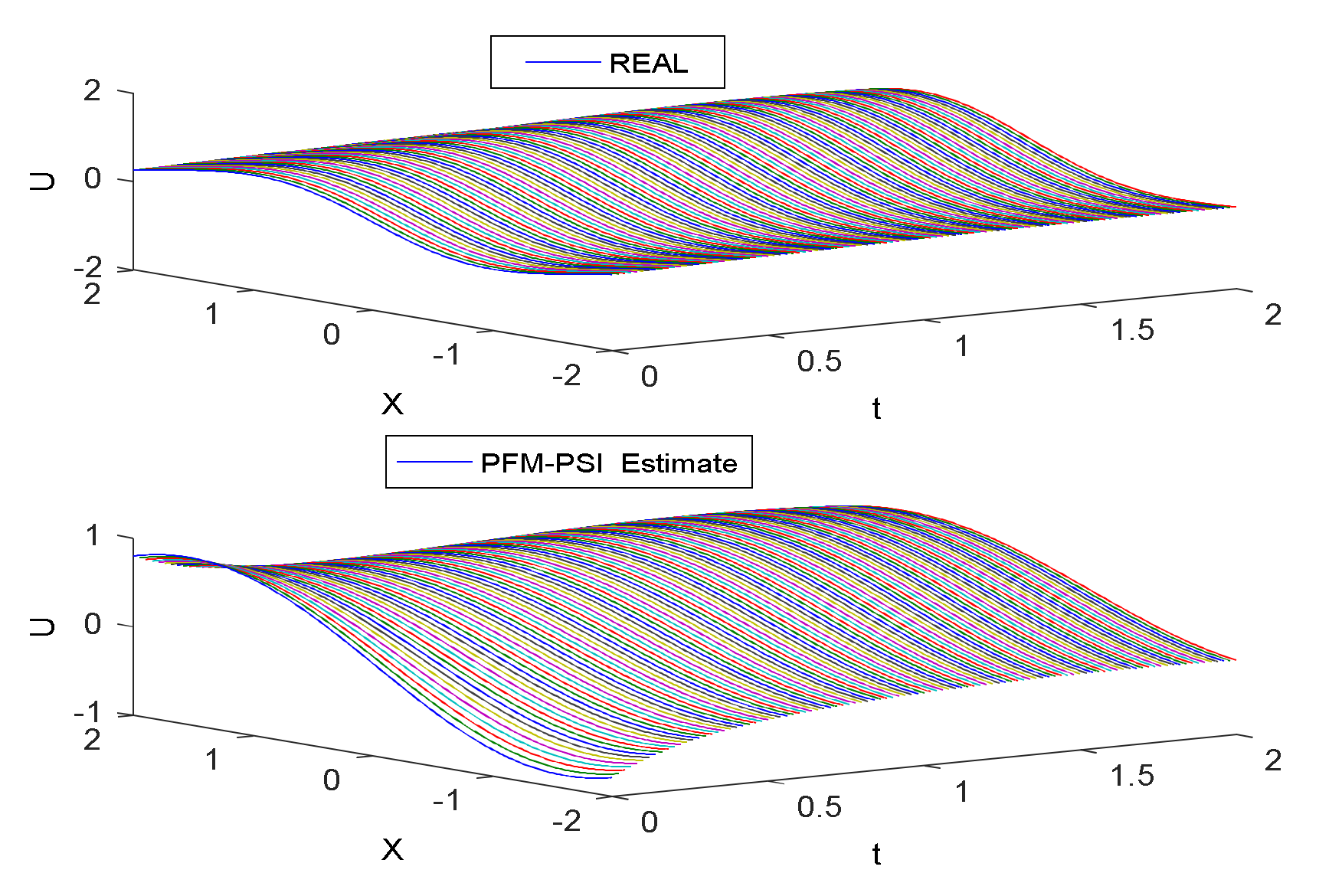
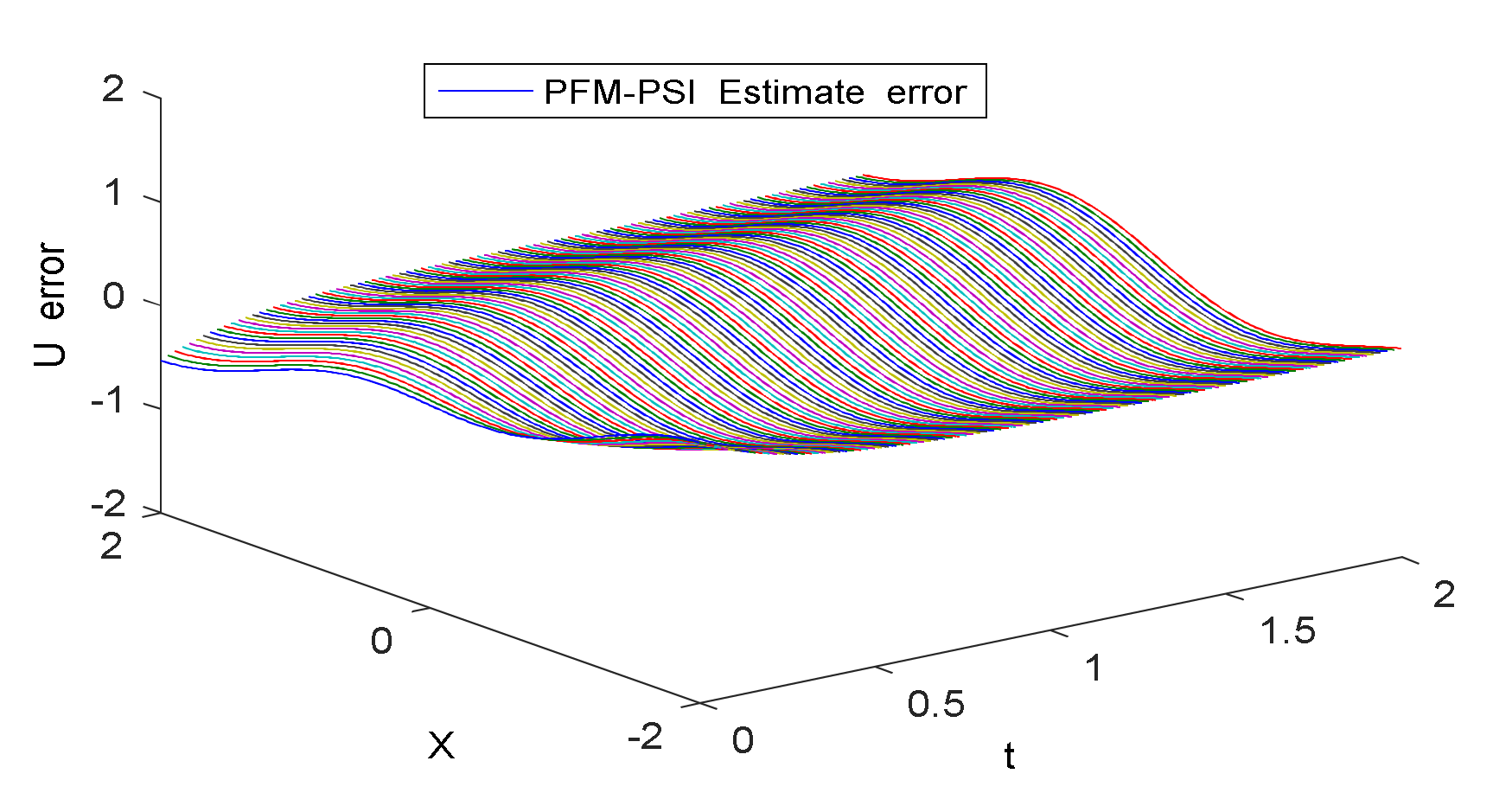
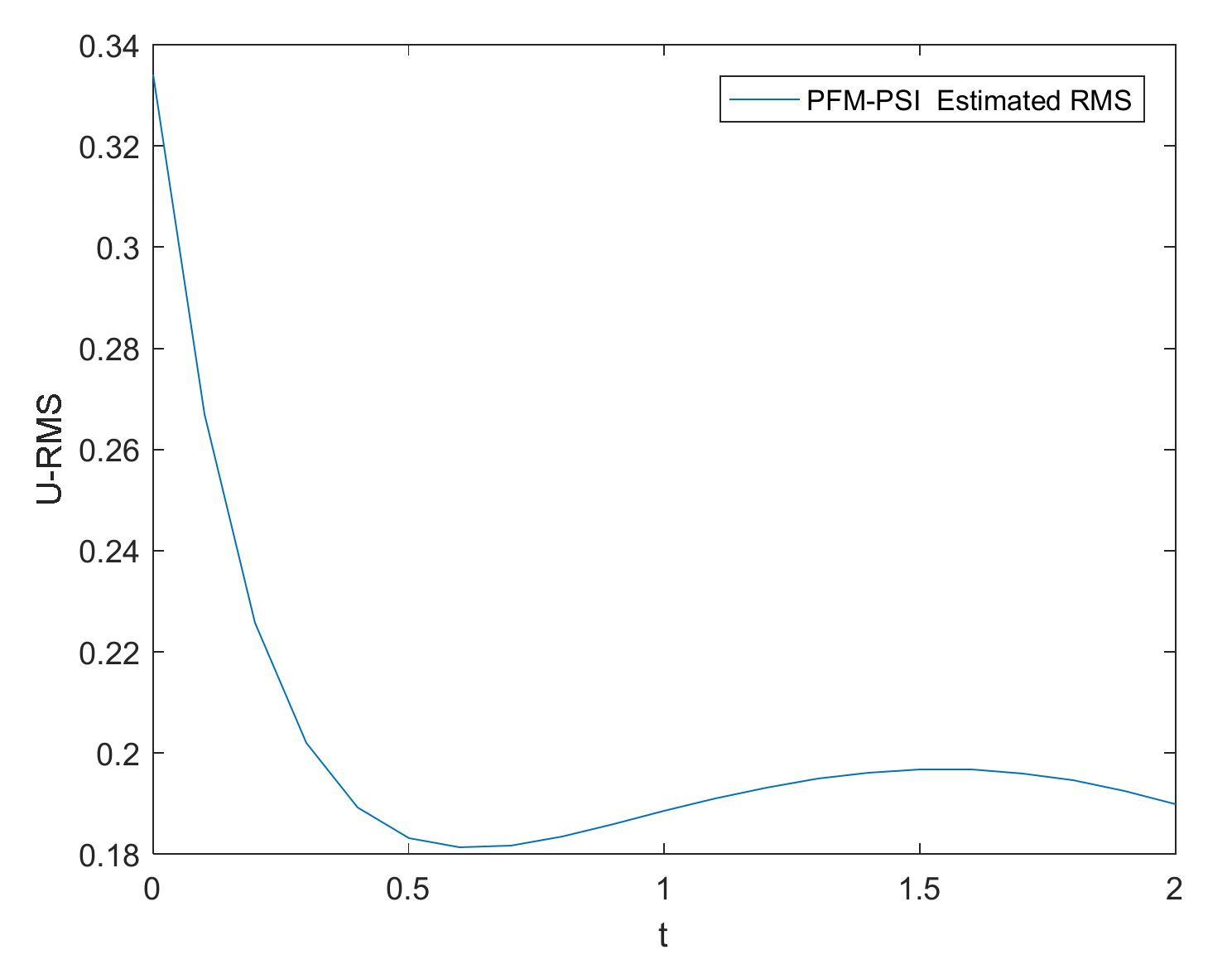
4. Illustrative Examples and Simulations
4.1. Example 1
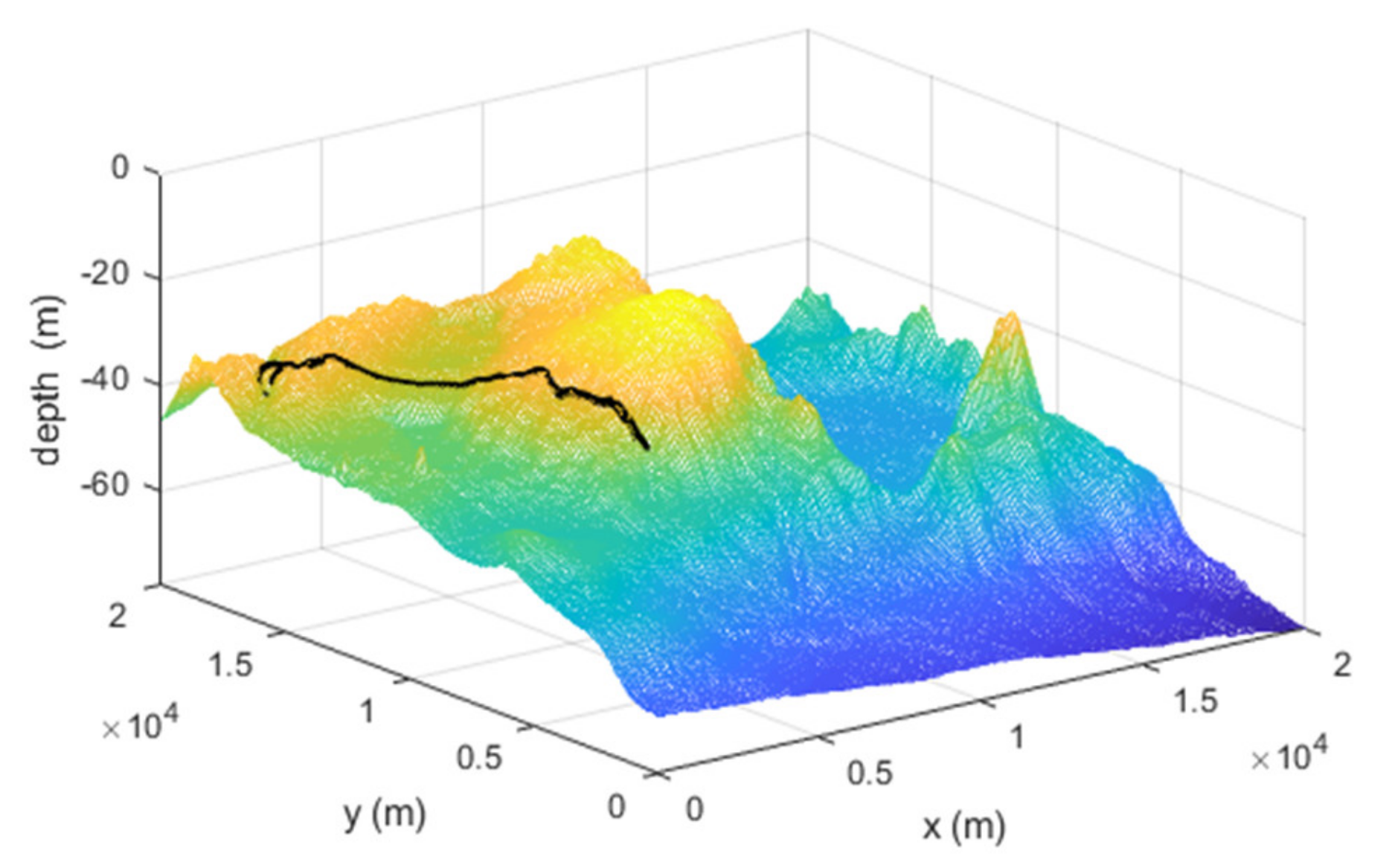
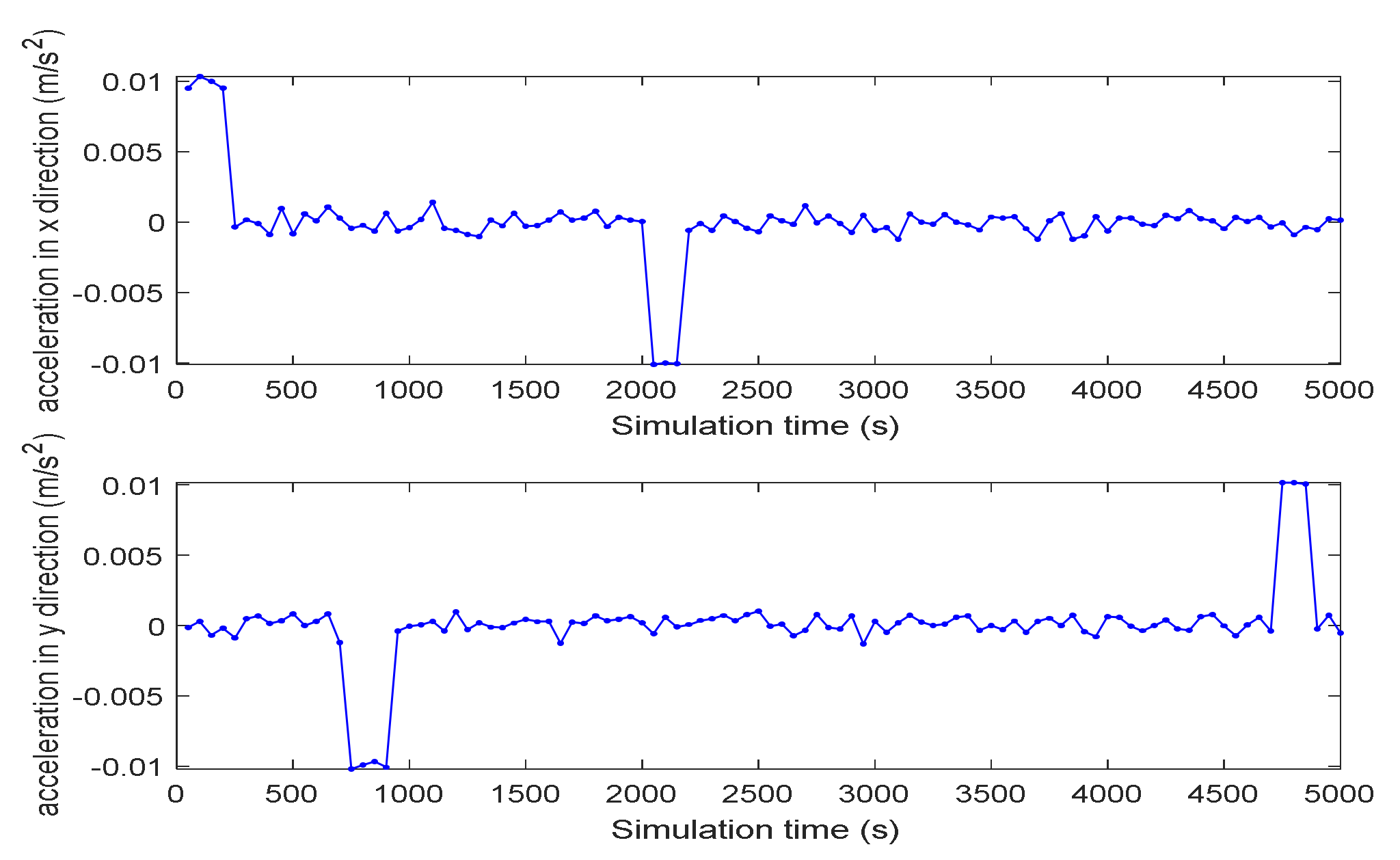
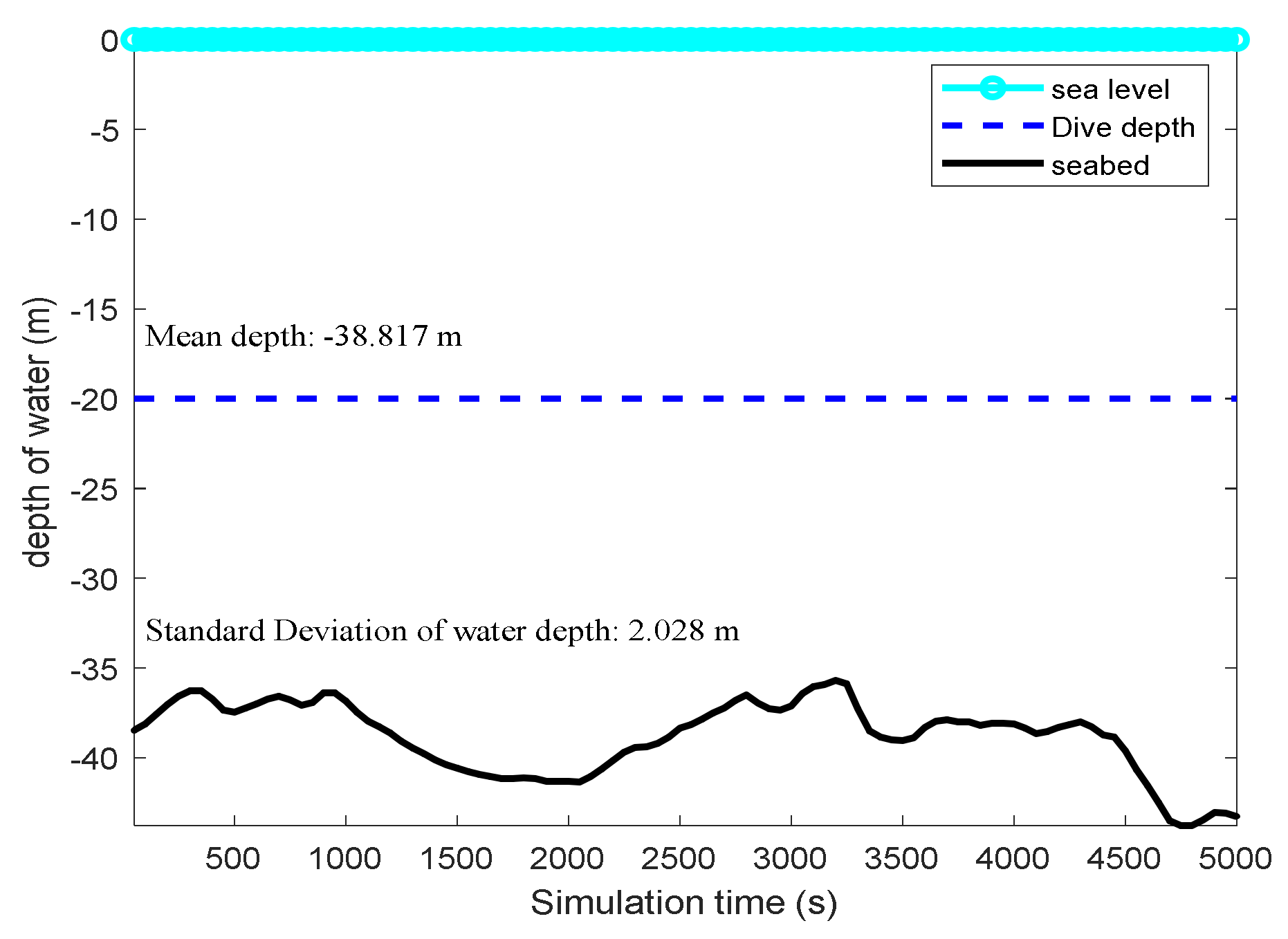
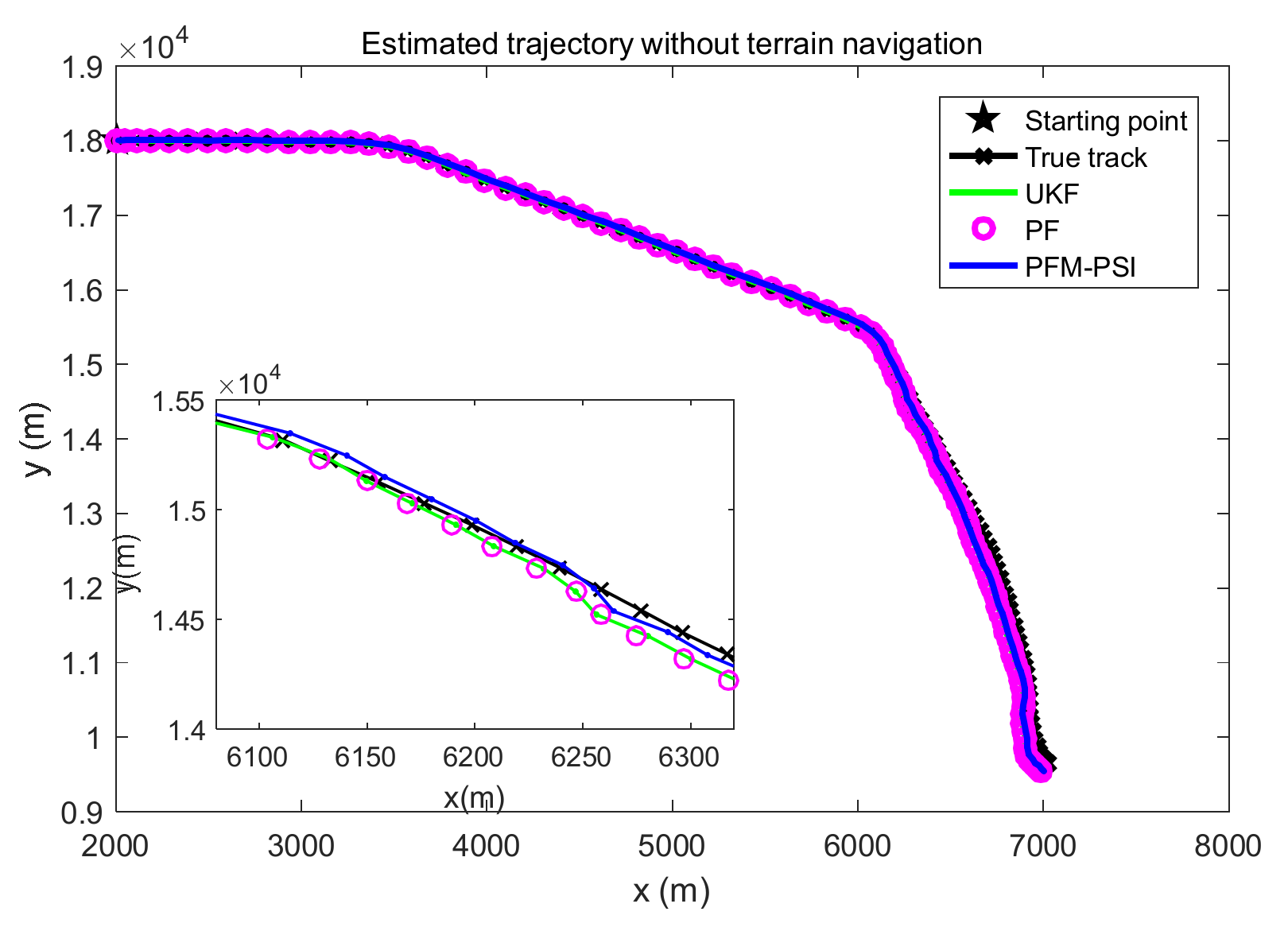
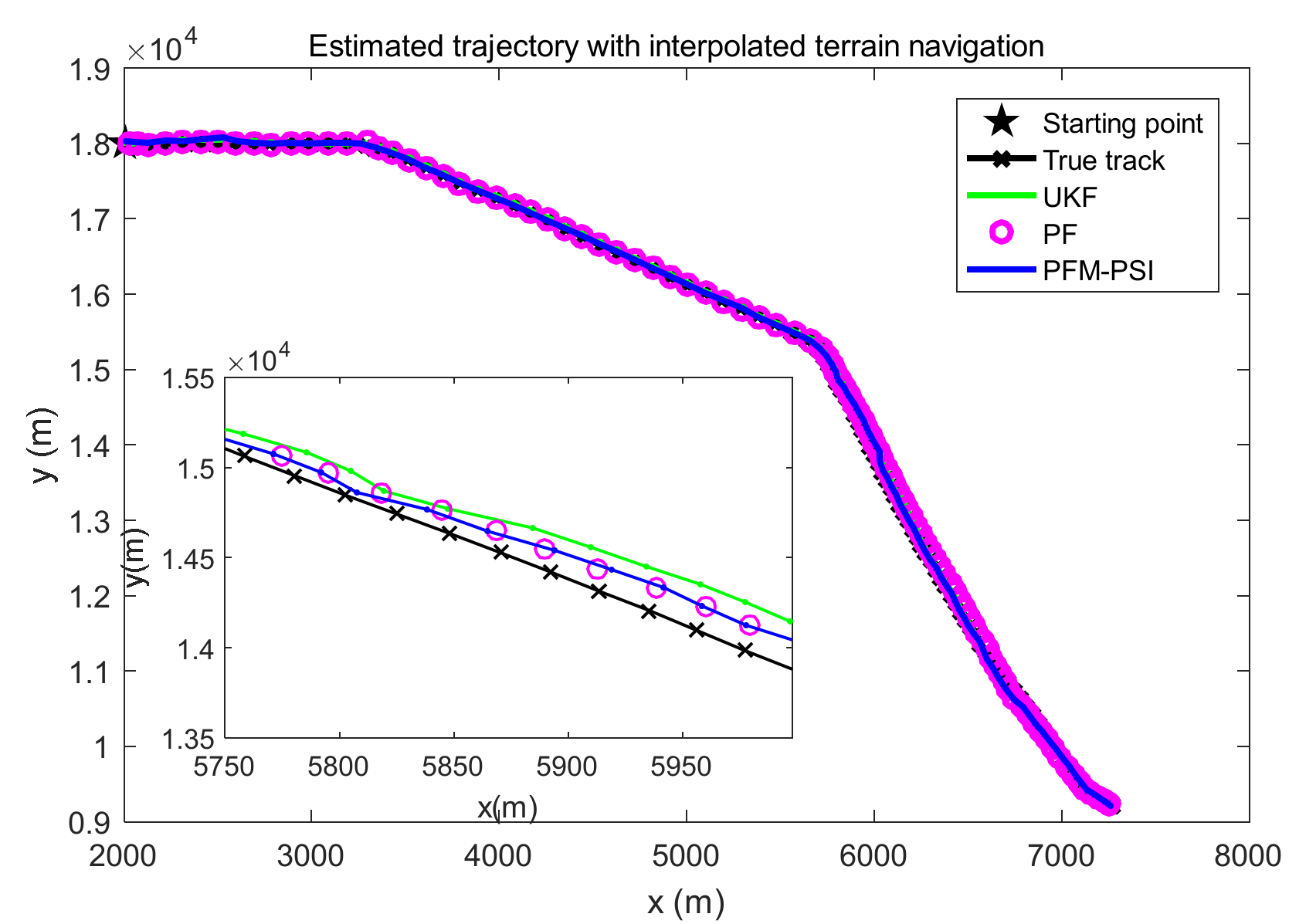
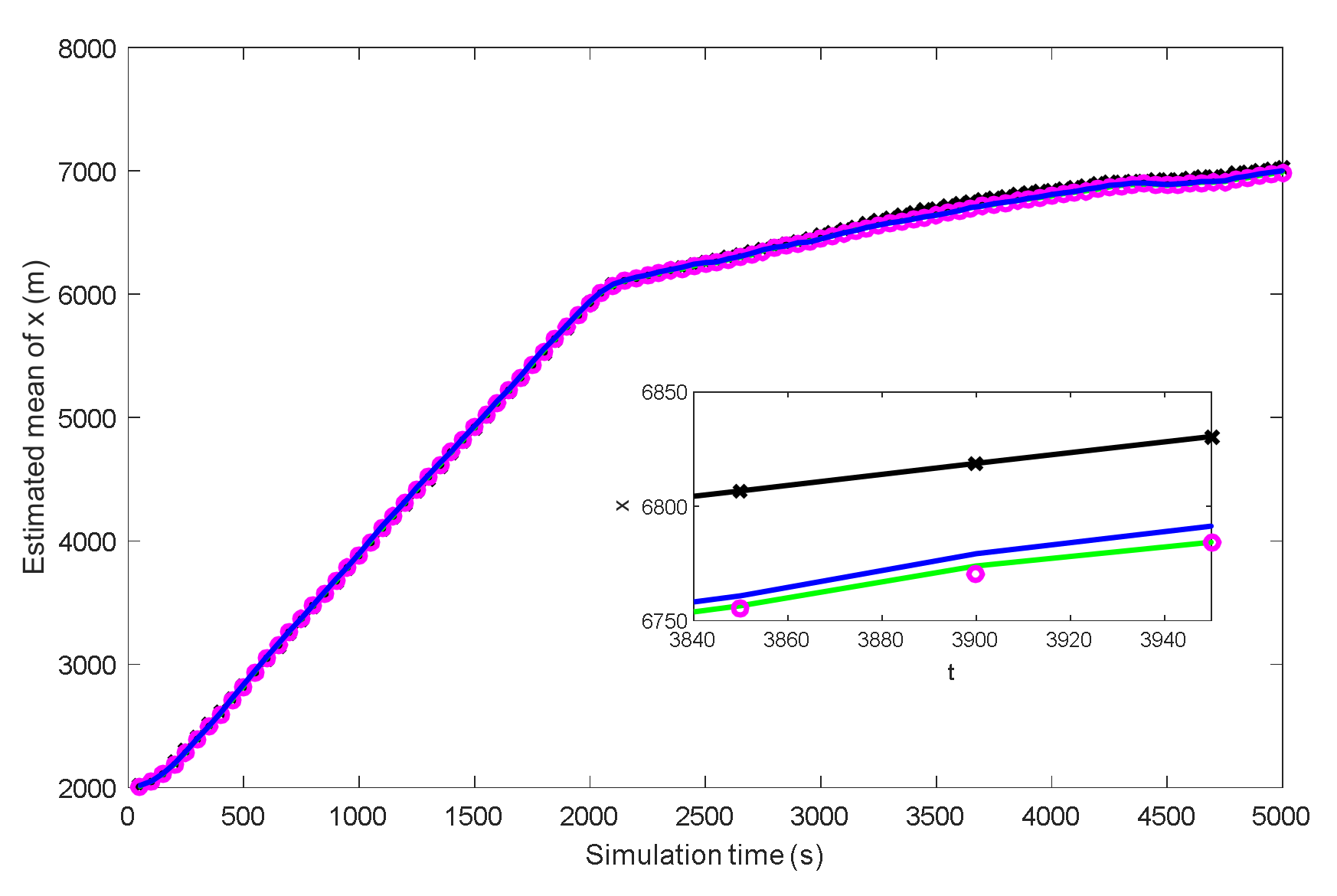
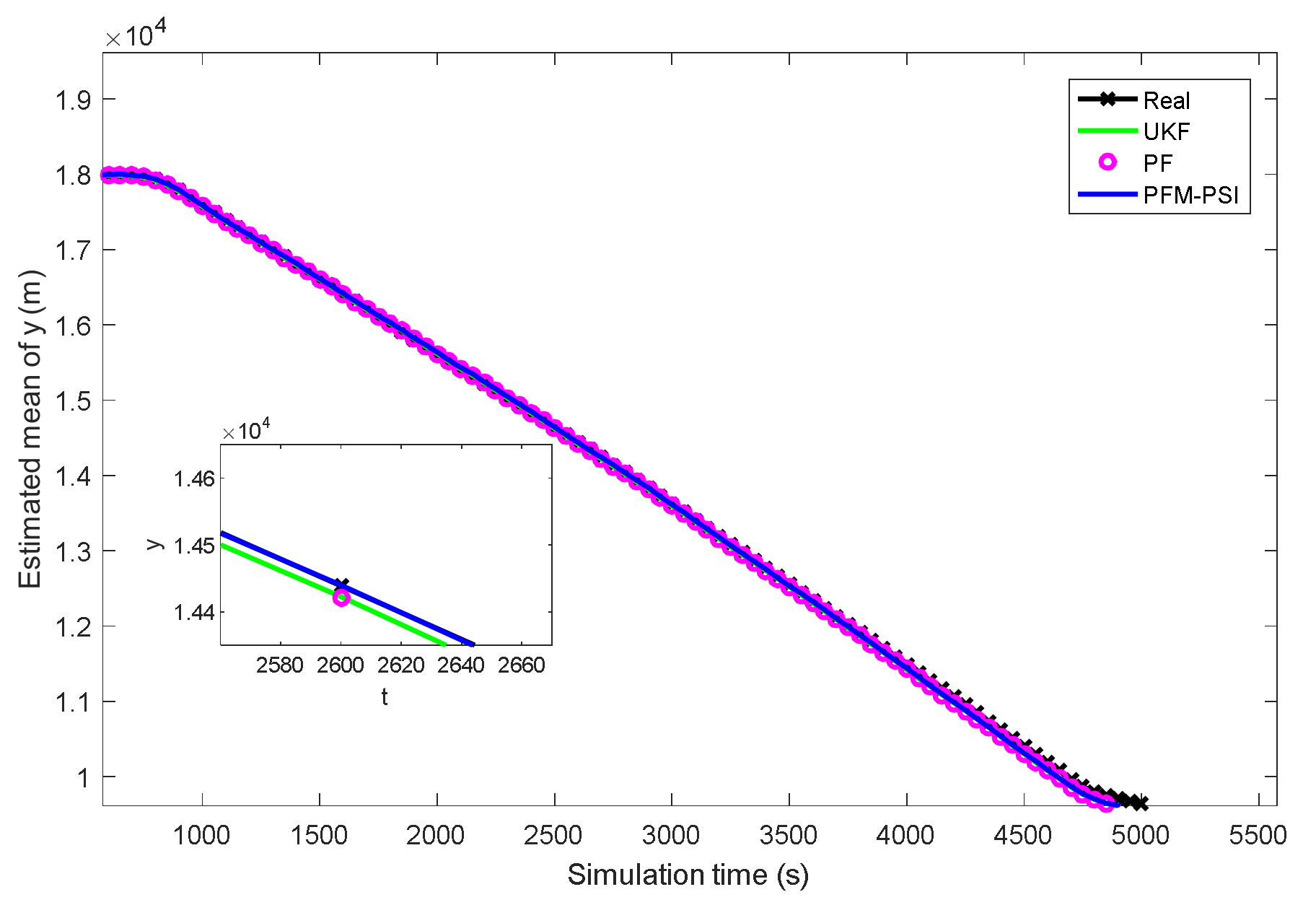
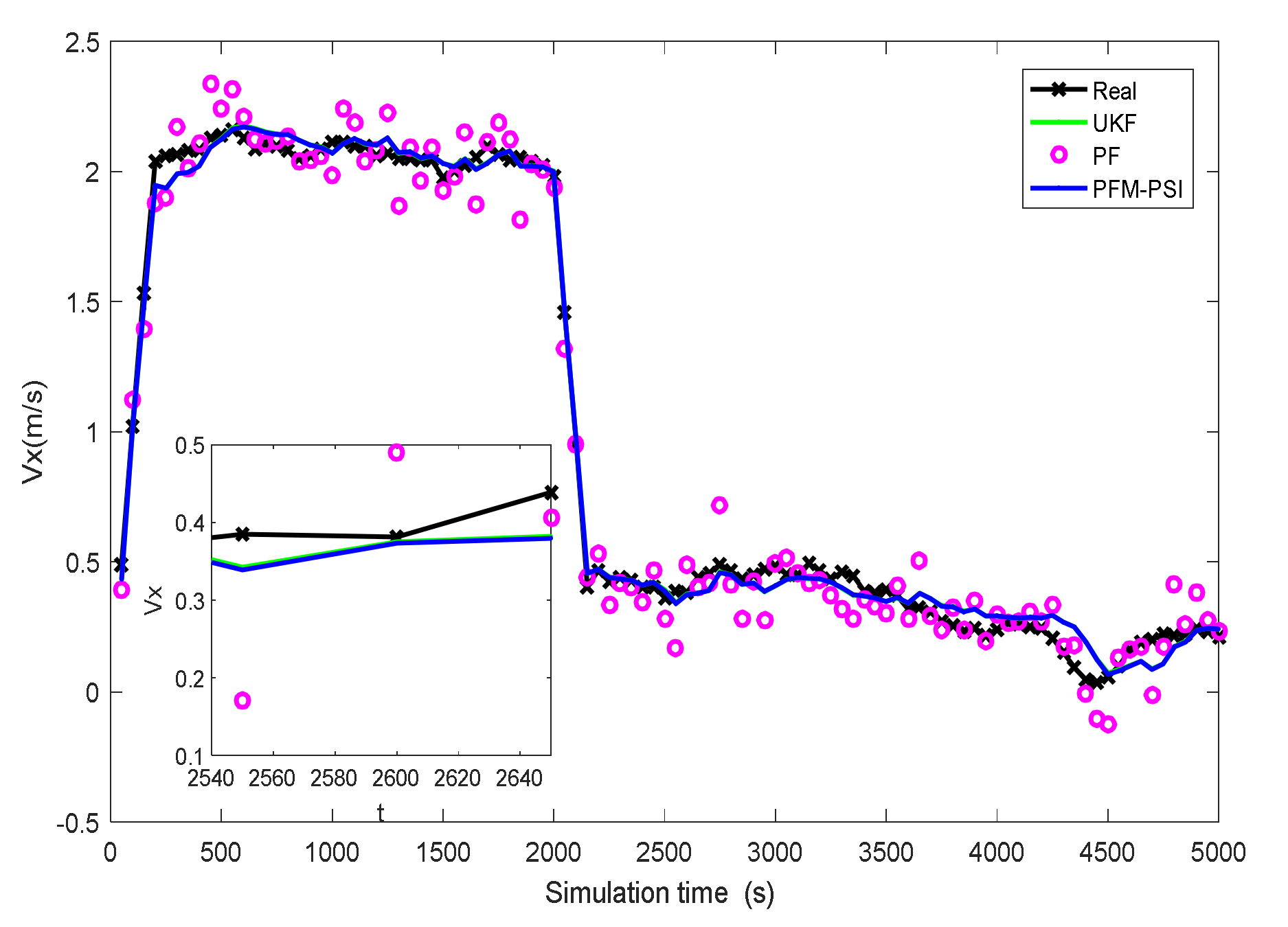
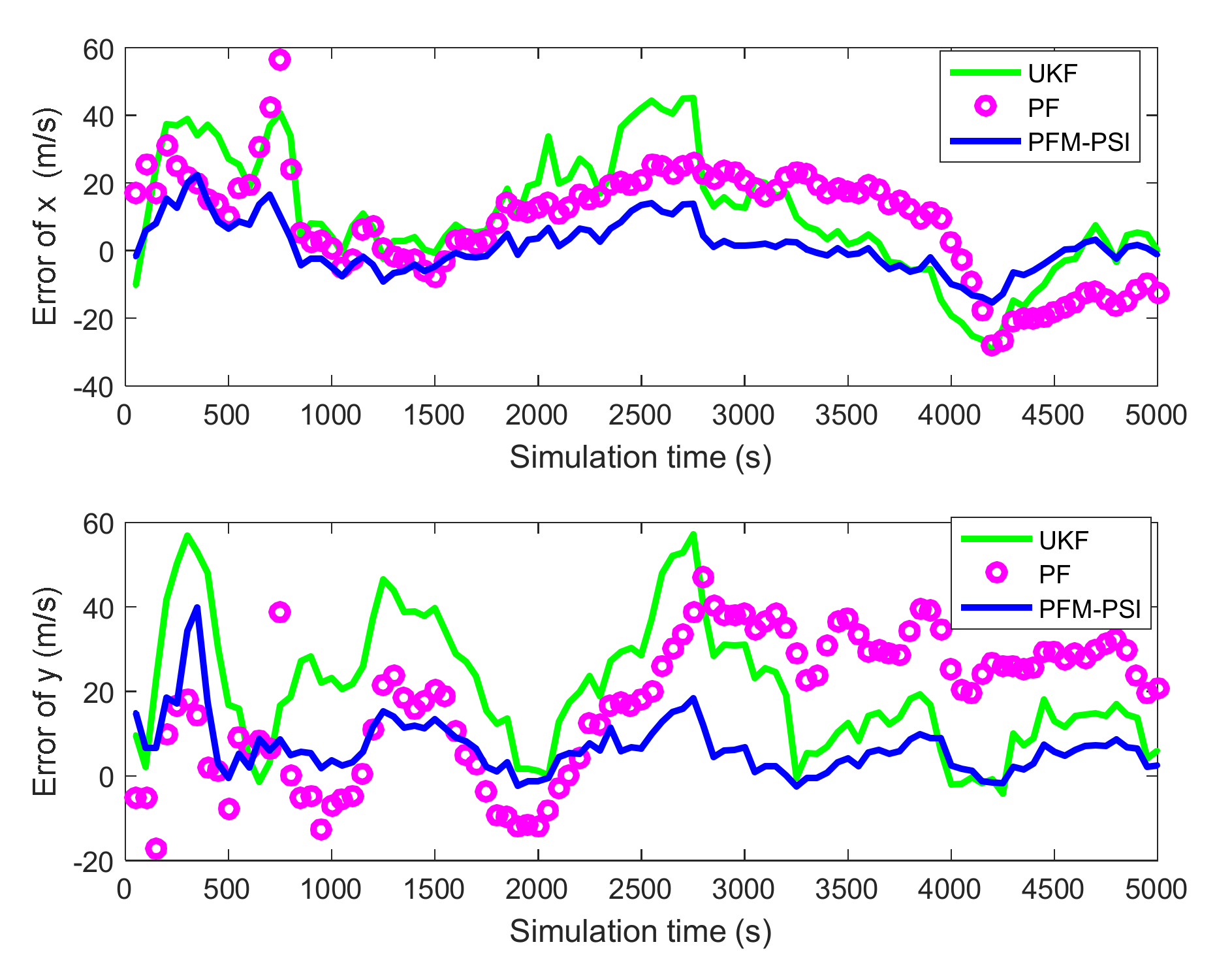
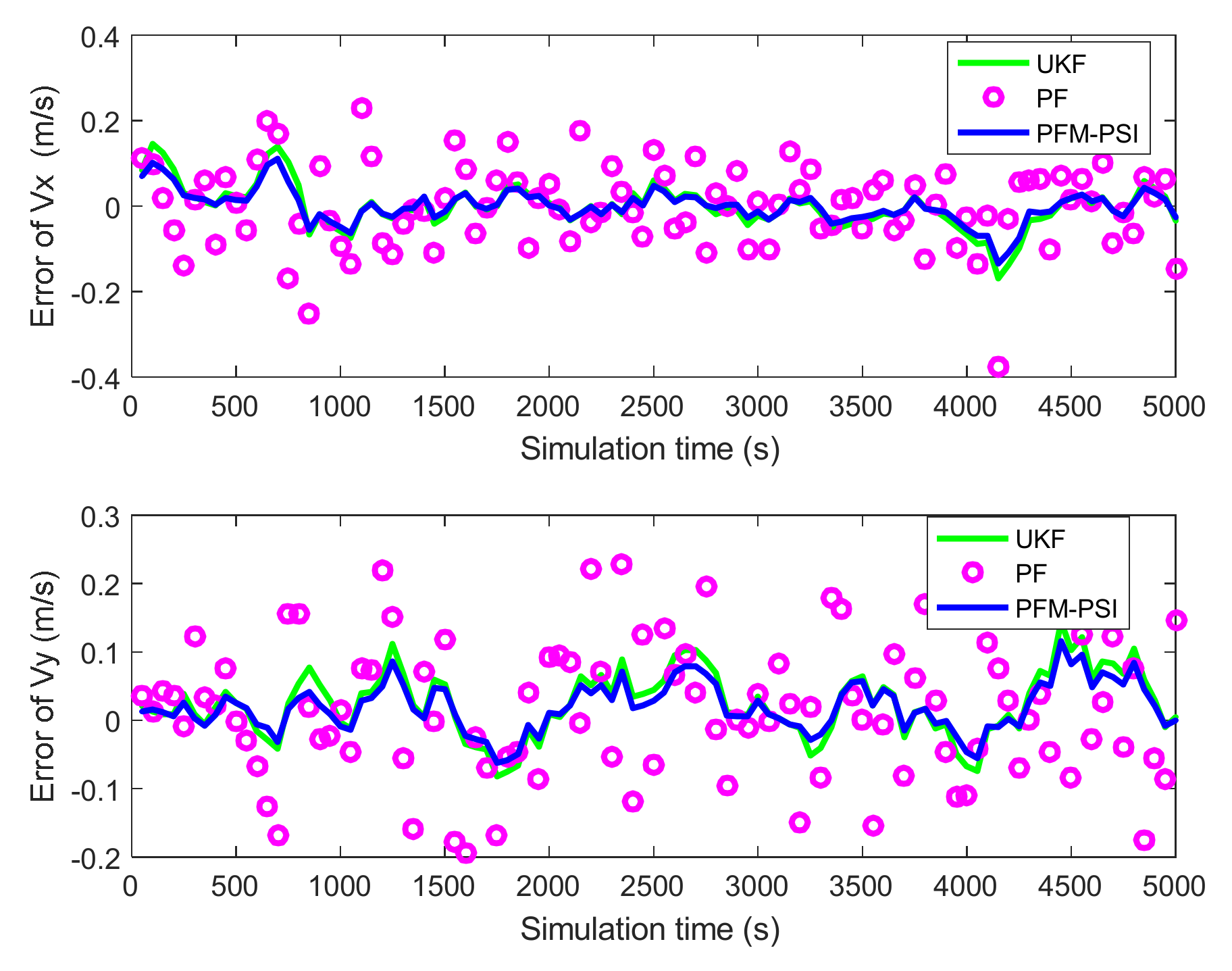
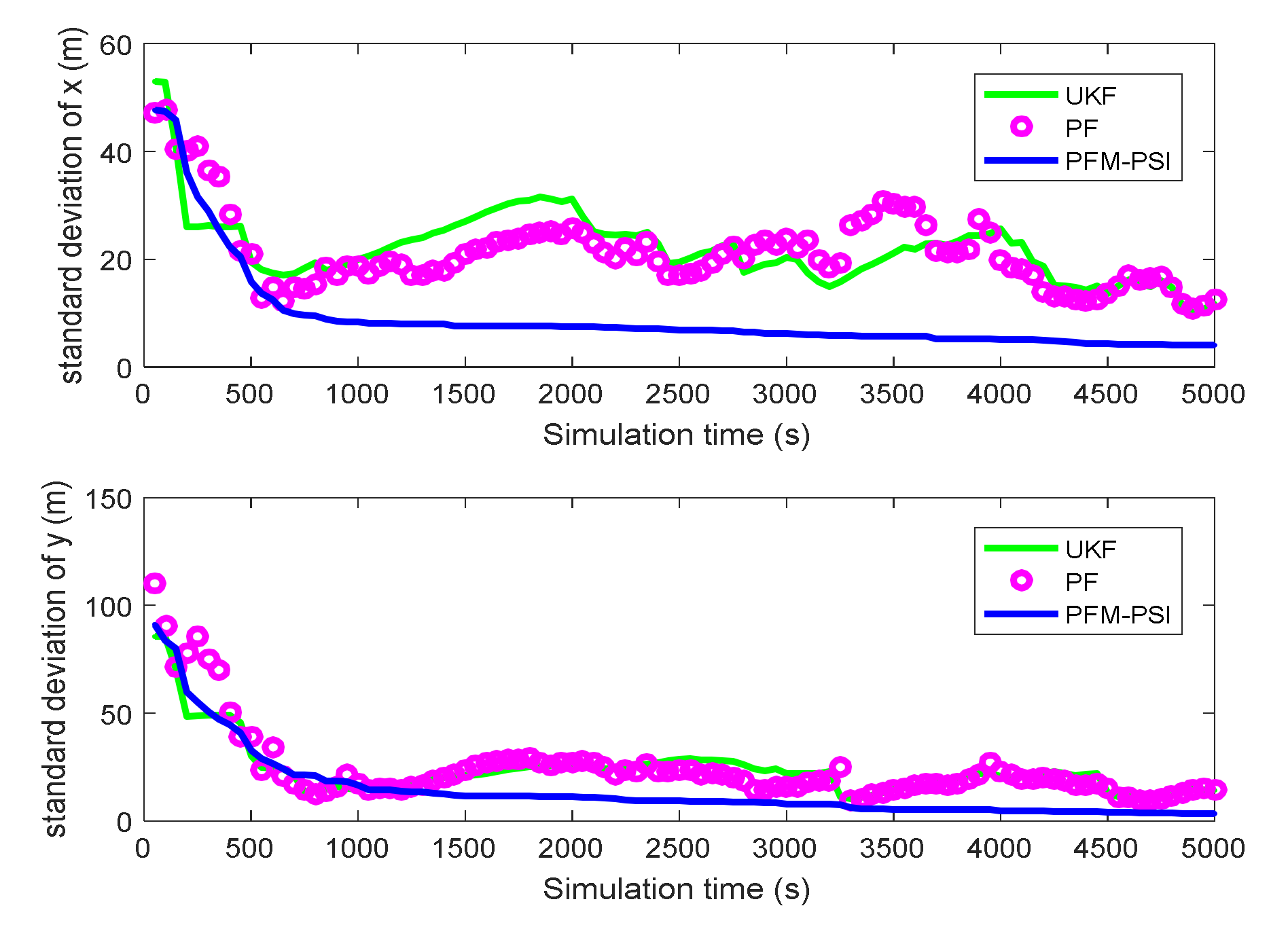
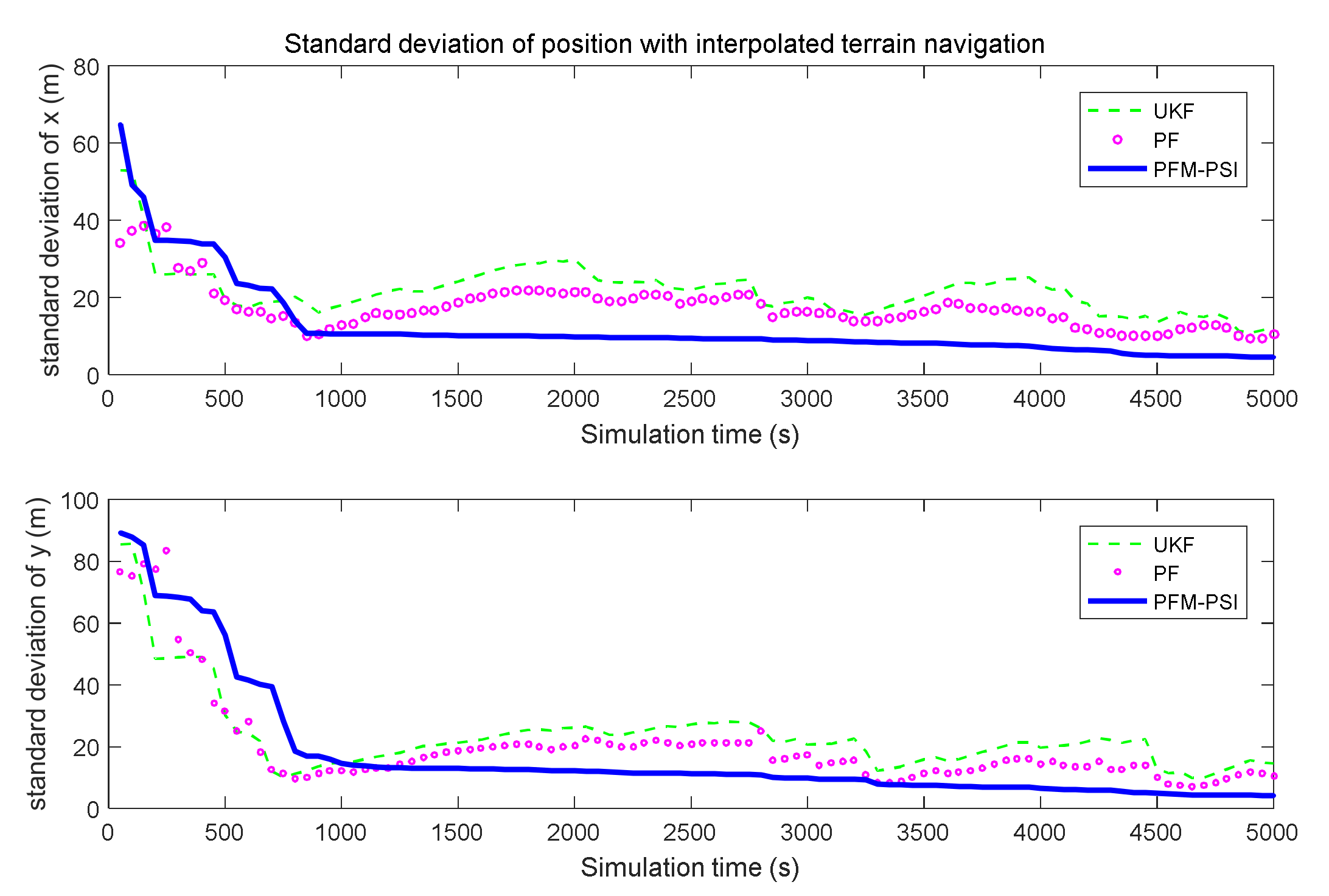
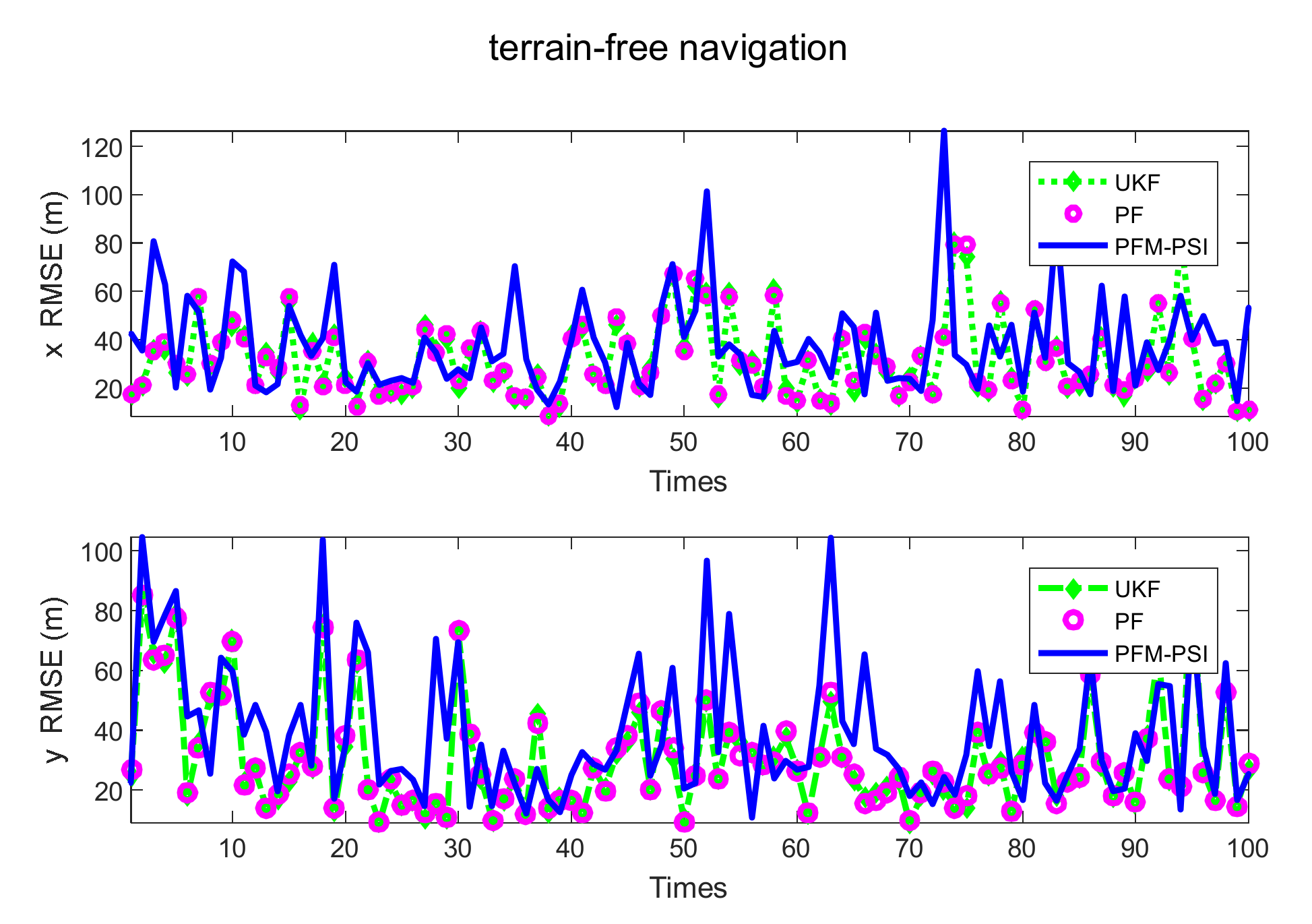
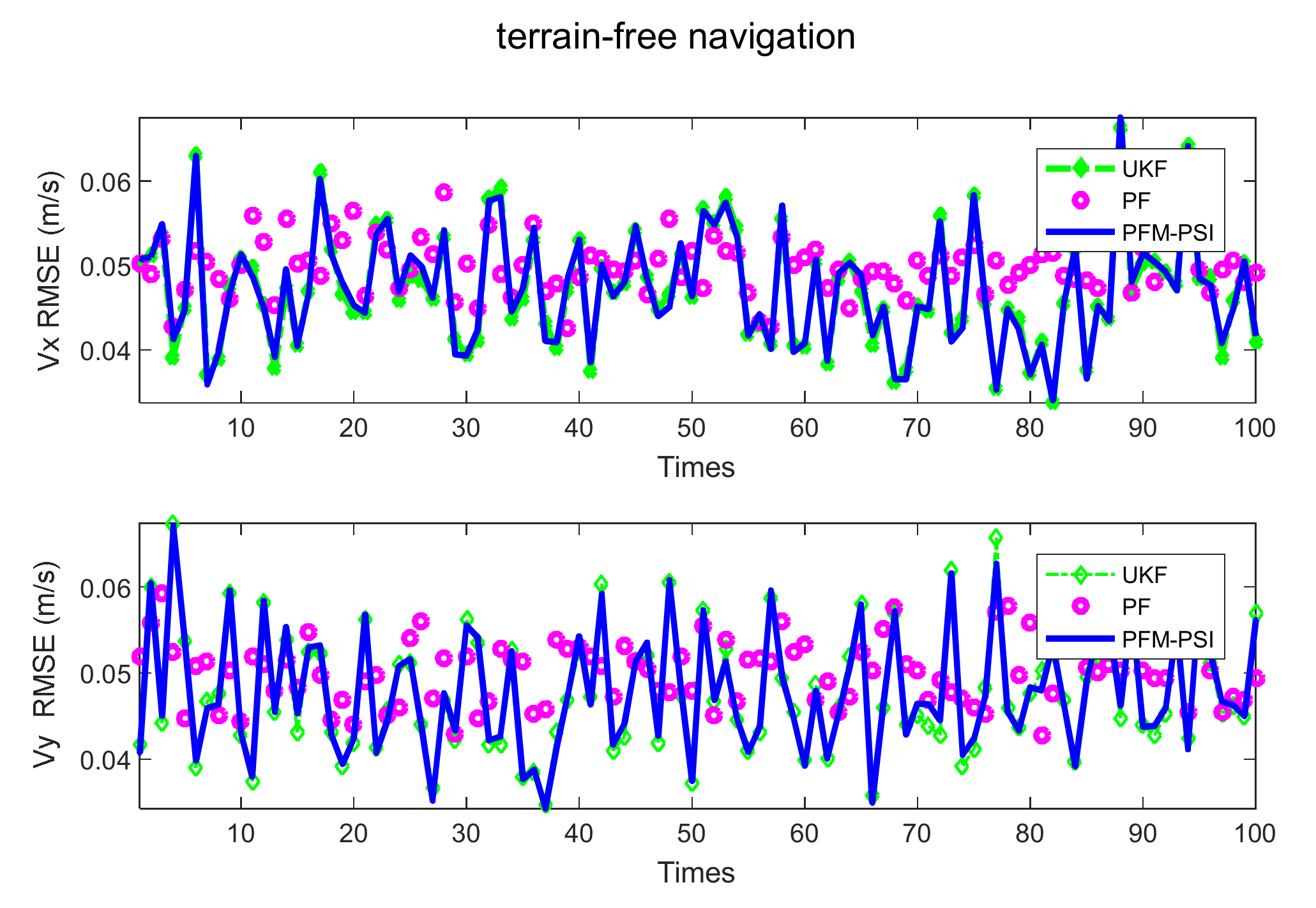
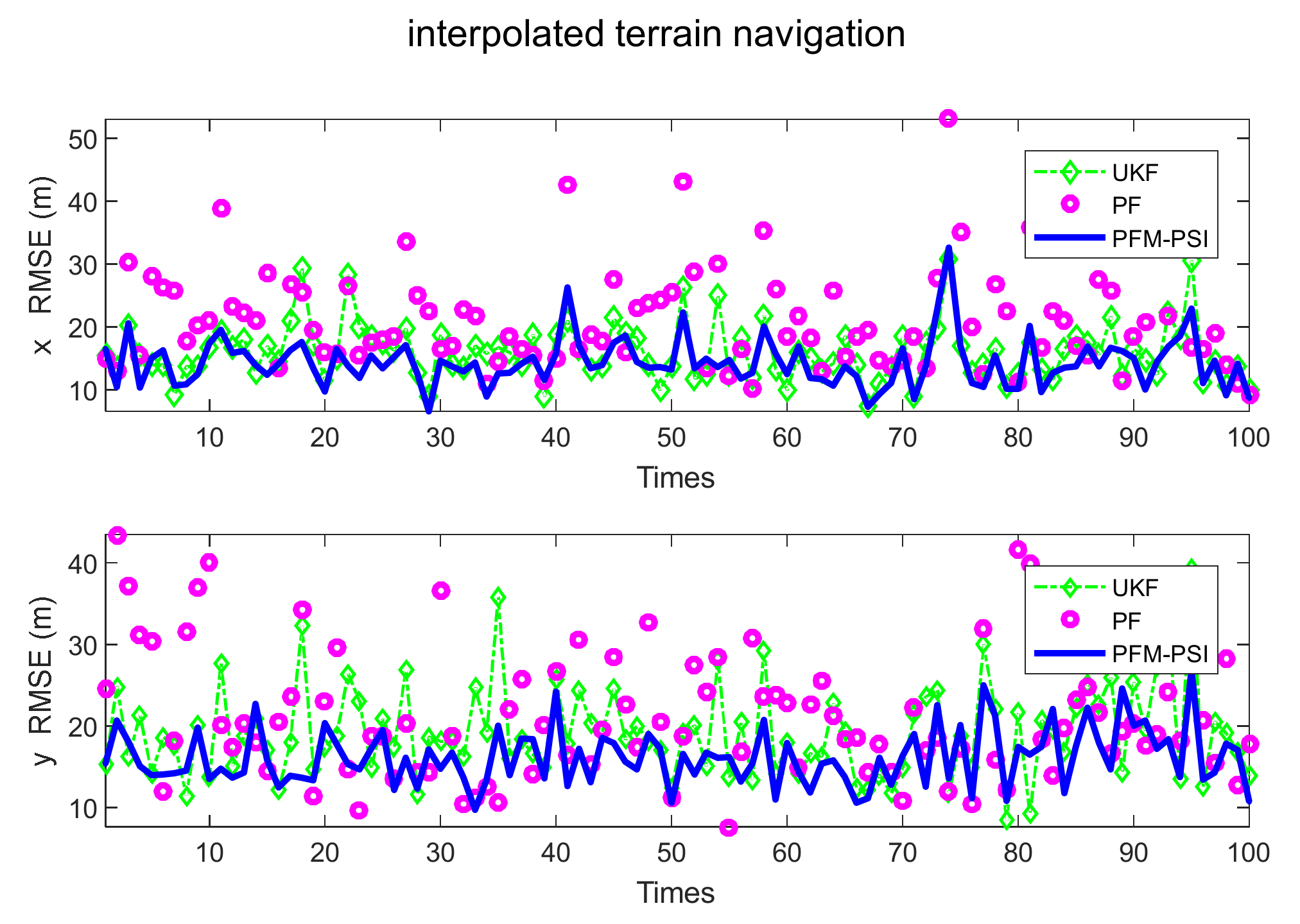
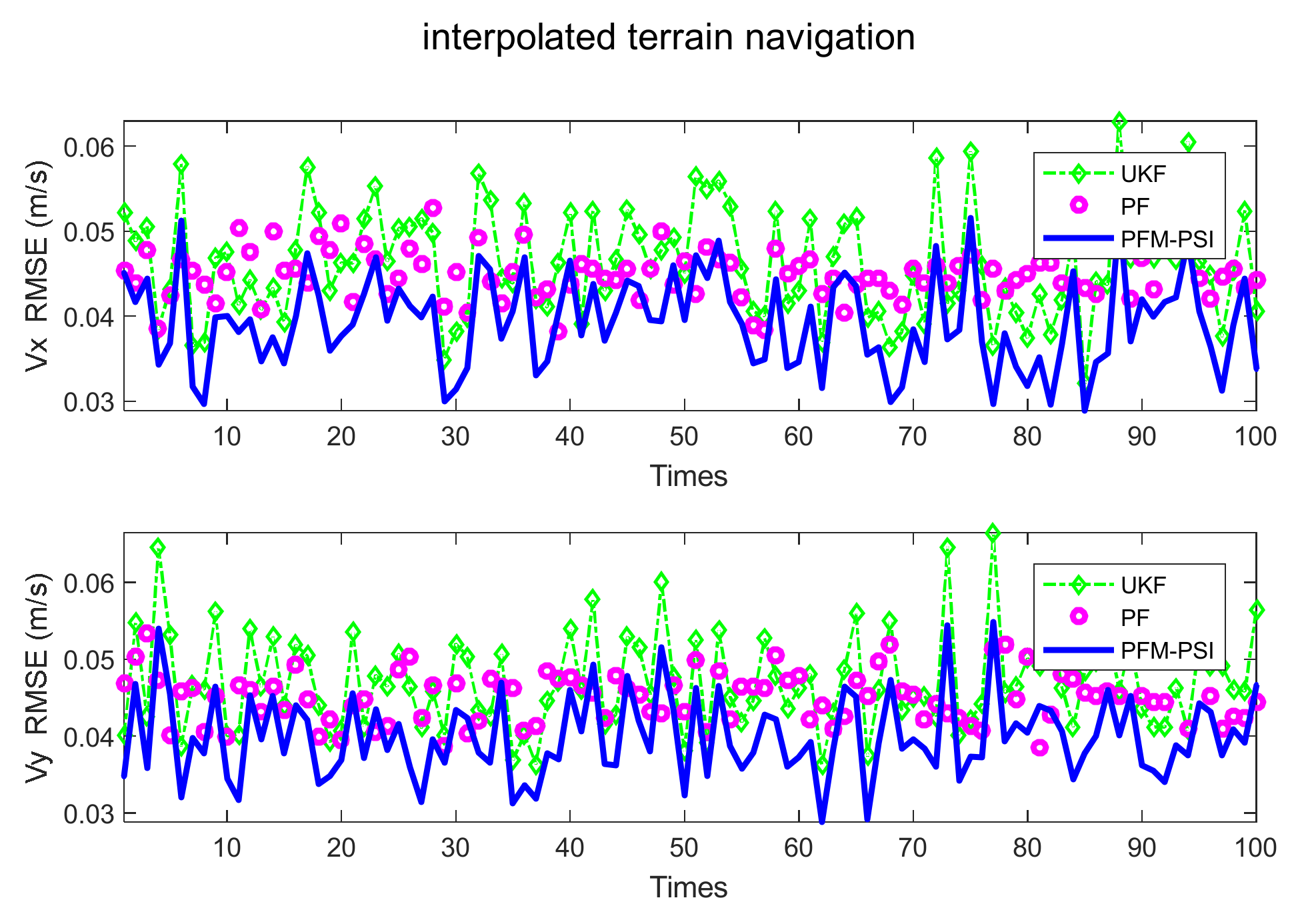
4.2. Example 2: State Estimation Model in Underwater Navigation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shang, J.; Chen, T. Optimal stealthy integrity attacks on remote state estimation: The maximum utilization of historical data. Automatica 2021, 128, 109555. [Google Scholar] [CrossRef]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Chen, L.; Ma, Y. An FEM-based State Estimation Approach to Nonlinear Hybrid Positioning Systems. Math. Probl. Eng. 2013, 2013, 165–195. [Google Scholar] [CrossRef] [Green Version]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME J. Basic Eng. 1960, 82, 34–35. [Google Scholar] [CrossRef] [Green Version]
- Kalman, R.E.; Bucy, R.S. New Results in Linear Filtering and Prediction Theory. Trans. ASME J. Basic Eng. 1961, 83, 95–108. [Google Scholar] [CrossRef]
- Kandepu, R.; Foss, B.; Imsland, L. Applying the unscented Kalman filter for nonlinear state estimation. J. Process. Control. 2008, 18, 753–768. [Google Scholar] [CrossRef]
- Bucy, R.S.; Senne, K.D. Digital synthesis of nonlinear filters. Automatica 1971, 7, 287–298. [Google Scholar] [CrossRef]
- Kushner, H.J. Dynamical Equations for Optimal Nonlinear Filter. J. Differ. Equ. 1967, 3, 179–190. [Google Scholar] [CrossRef] [Green Version]
- Faruqi, F.A.; Tumer, K.J. Non-Linear Mathematical Model for Iniegrated Global Positioning/Inertial Navigation System. Appl. Math. Comput. 2000, 115, 213–227. [Google Scholar]
- Simon, J.; Durrant-Whyte, H.F. Process models for the high-speed navigation of road vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; pp. 101–105. [Google Scholar]
- Gordon, N.J.; Salmond, D.J.; Smith, A.F.M. Novel approach to nonlinearnon-Gaussian Bayesian state estimation. IEE Proc. Part F: Radar Signal Process. 1993, 140, 107–113. [Google Scholar]
- Pitt, M.K.; Shephard, N. Filtering Via Simulation: Auxiliary Particle Filters. J. Am. Stat. Assoc. 1999, 94, 590–591. [Google Scholar] [CrossRef]
- Li, X.; Gao, W.; Zhang, J. A Novel Hybrid Unscented Particle Filter based on Firefly Algorithm for Tightly-Coupled Stereo Visual-Inertial Vehicle Positioning. J. Navig. 2020, 73, 613–627. [Google Scholar] [CrossRef]
- Kotecha, J.H.; Djuric, P.M. Gaussian particle filtering. IEEE Trans. Signal Process. 2003, 51, 2592–2601. [Google Scholar] [CrossRef] [Green Version]
- Ye, Z.; Wang, T.; Wen, Q.; Zhang, X. Improved rao-blackwellised particle filter based on randomly weighted particle swarm optimization. Comput. Electr. Eng. 2018, 71, 477–484. [Google Scholar]
- Ann, C.B.; William, E.S. Bayesian Estimation of Multivariate Location Parameters. Handb. Stat. 2005, 25, 221–244. [Google Scholar]
- Nidhan, C.; Subhashis, G.; Anindy, R.; William, E.S. Bayesian Methods for Function Estimation. Handb. Stat. 2005, 25, 373–414. [Google Scholar]
- Patwardhan, S.C.; Narasimhan, S.; Jagadeesan, P.; Gopaluni, B.; Shah, S.L. Nonlinear Bayesian state estimation: A review of recent developments. Control. Eng. Pract. 2012, 20, 933–953. [Google Scholar] [CrossRef]
- Xu, H.; Xie, W.; Yuan, H.; Duan, K.; Liu, W.; Wang, Y. Fixed point iteration gaussian sum filtering estimator whith unknown time varying non gaussian measurement noise. Signal Process. 2018, 153, 132–142. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, Z.; Li, N.; Chambers, J. A novel adaptive kalman filter with inaccurate process and measurement noise covariance matrices. IEEE Trans. Automat. Contr. 2018, 63, 594–601. [Google Scholar]
- Park, S.; Hwang, J.; Kim, E.; Kang, H.J. A new evolutionary particle filter for the prevention of sample impoverishment. IEEE Trans. Evol. Comput. 2009, 13, 801–809. [Google Scholar] [CrossRef]
- Beard, R.; Gunther, J.; Lawton, J.; Stirling, W. Nonlinear projection filter based on galerkin approximation. J. Guid. Control. Dyn. 1999, 22, 258–266. [Google Scholar] [CrossRef]
- Lemos, J.M.; Costa, B.A.; Rocha, C. A Fokker-Planck approach to joint state-parameter estimation. IFAC-PapersOnLine 2018, 51, 389–394. [Google Scholar] [CrossRef]
- Barbara, K.; Barbara, P. Parameter estimation in SDEs via the Fokker–Planck equation: Likelihood function and adjoint based gradient computation. J. Math. Anal. Appl. 2018, 465, 872–884. [Google Scholar]
- Hosseiny, A.; Jaberipur, G. Complex exponential functions: A high-precision hardware realization. Integration 2020, 73, 18–29. [Google Scholar] [CrossRef]
- Hatamzadeh-Varmazyar, S.; Masouri, Z.; Babolian, E. Numerical method for solving arbitrary linear differential equations using a set of orthogonal basis functions and operational matrix. Appl. Math. Model. 2016, 40, 233–253. [Google Scholar] [CrossRef]
- Luo, X.; Yau, S.S.-T. Hermite Spectral Method with Hyperbolic Cross Approximations to High-Dimensional Parabolic PDEs. SIAM J. Numer. Anal. 2013, 51, 3186–3212. [Google Scholar] [CrossRef] [Green Version]
- Lathi, B.P. Linear Systems and Signals, 2nd ed.; Oxford University Press: New York, NY, USA, 2005; pp. 55–75. [Google Scholar]
- Anonsen, S.K.B. Advances in Terrain Aided Navigation for Underwater Vehicles. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2010. [Google Scholar]
- Liu, X.; Fang, H.; Xiong, Z.; Xu, N. Multi-step-ahead Time Series Prediction based on LSSVR using UKF with Sliding-Windows. J. Xinyang Norm. Univ. Nat. Sci. Ed. 2019, 32, 320–326. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Title 1 | Title 2 | Title 3 | Title 4 | Title 4 |
|---|---|---|---|---|
| UKF without terrain navigation UKF with interpolated terrain navigation | 42.7971 | 48.6431 | 0.0482 | 0.0475 |
| 24.3878 | 23.2341 | 0.0486 | 0.0484 | |
| PF without terrain navigation PF with interpolated terrain navigation | 42.7971 | 48.6431 | 0.0482 | 0.0475 |
| 13.9931 | 13.9590 | 0.0460 | 0.0454 | |
| PFM-PSI without terrain navigation PFM-PSI with interpolated terrain navigation | 23.6374 | 23.0574 | 0.0483 | 0.0479 |
| 13.8521 | 14.3815 | 0.0460 | 0.0451 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Zhang, Z.; Zhang, Y.; Xiong, X.; Fan, F.; Ma, S. Research on Projection Filtering Method Based on Projection Symmetric Interval and Its Application in Underwater Navigation. Symmetry 2021, 13, 1715. https://doi.org/10.3390/sym13091715
Chen L, Zhang Z, Zhang Y, Xiong X, Fan F, Ma S. Research on Projection Filtering Method Based on Projection Symmetric Interval and Its Application in Underwater Navigation. Symmetry. 2021; 13(9):1715. https://doi.org/10.3390/sym13091715
Chicago/Turabian StyleChen, Lijuan, Zihao Zhang, Yapeng Zhang, Xiaoshuang Xiong, Fei Fan, and Shuangbao Ma. 2021. "Research on Projection Filtering Method Based on Projection Symmetric Interval and Its Application in Underwater Navigation" Symmetry 13, no. 9: 1715. https://doi.org/10.3390/sym13091715
APA StyleChen, L., Zhang, Z., Zhang, Y., Xiong, X., Fan, F., & Ma, S. (2021). Research on Projection Filtering Method Based on Projection Symmetric Interval and Its Application in Underwater Navigation. Symmetry, 13(9), 1715. https://doi.org/10.3390/sym13091715