3.1. Phase Space Reduction of the Planar Three-Body Problem
Here we recount the elimination, from the 3-body problem, of the extrinsic degrees of freedom, i.e., those that have to do with the position and orientation of the system in absolute space. We will focus on the planar case, that is, when the total angular momentum is orthogonal to the plane of the three particles, which means that the particles never leave that plane and the treatment is simplified. The zero angular momentum case, which we are ultimately interested in, can be seen as a particular case of the planar one. Our treatment will follow the one of [
13].
The extended phase space of the Newtonian three-body problem is , with coordinates for the particle positions, and for the momenta. It is well known that if the angular momentum is orthogonal to the plane identified by the three particles, , then the three particles never leave that plane during the evolution.
Let us assume, from now on, that the problem is planar. We can then assume that the position and momenta are two-component vectors . The degrees of freedom are six, but three are gauge, corresponding to the translations and rotations on the plane of the motion. We have to restrict to the hypersurface , where is the remaining non-zero component of the angular momentum, and then we have to quotient by the transformations generated by these constraints. It turns out that in this case we can take the ‘royal road’ of explicitly identifying a sufficient number of gauge-invariant degrees of freedom (observables), and perform a coordinate transformation in phase space that separates them from the gauge degrees of freedom, making them orthogonal coordinates.
To deal with translations, we define the mass-weighted Jacobi coordinates:
The transformation to them is linear and invertible,
so, looking at the symplectic potential,
it appears obvious that the momenta conjugate to
are related to
by the transpose of the inverse of the matrix
M (notice that
M is not symmetric):
The inverse transformation is (the transpose and the inverse of an invertible matrix commute):
Note that the inverse matrix is
and has a constant column. It is the column of
,
which is, therefore, proportional to the total momentum and decouples from the problem. The coordinates
are the coordinates of the center of mass, which decouple too. The other two momenta are
As we said, the transformation to Jacobi coordinate and momenta is canonical, and, therefore, it leaves the Poisson brackets invariant:
The kinetic term is diagonal in the momenta
,
as is the moment of inertia,
(notice how the sum is from
to 2, because
does not depend on the coordinates of the center of mass
. The inertia tensor also takes a particularly simple form:
We are left with four coordinates
,
and momenta
,
, and a single angular momentum component (the one perpendicular to the plane of the triangle):
where with the vector product between two 2-dimensional vector we understand a scalar
. The coordinates
are invariant under the remaining rotational symmetry and, therefore, give a complete coordinate system on the reduced configuration space. Notice that
changes sign under a planar reflection (changing the sign of one of the coordinates, say
x, of both
and
) while
and
remain invariant, and, therefore, the map
relates triangles conjugate under mirror transformations. This also has the consequence that the
plane contains only collinear configurations (whose mirror image is identical to the original, modulo a planar rotation). This has nothing to do with 3D reflections (obtained by changing the sign of
all components of every Euclidean vector). In fact triangles are invariant under such parity transformations, because their parity conjugate is related to the original by a non-planar rotation.
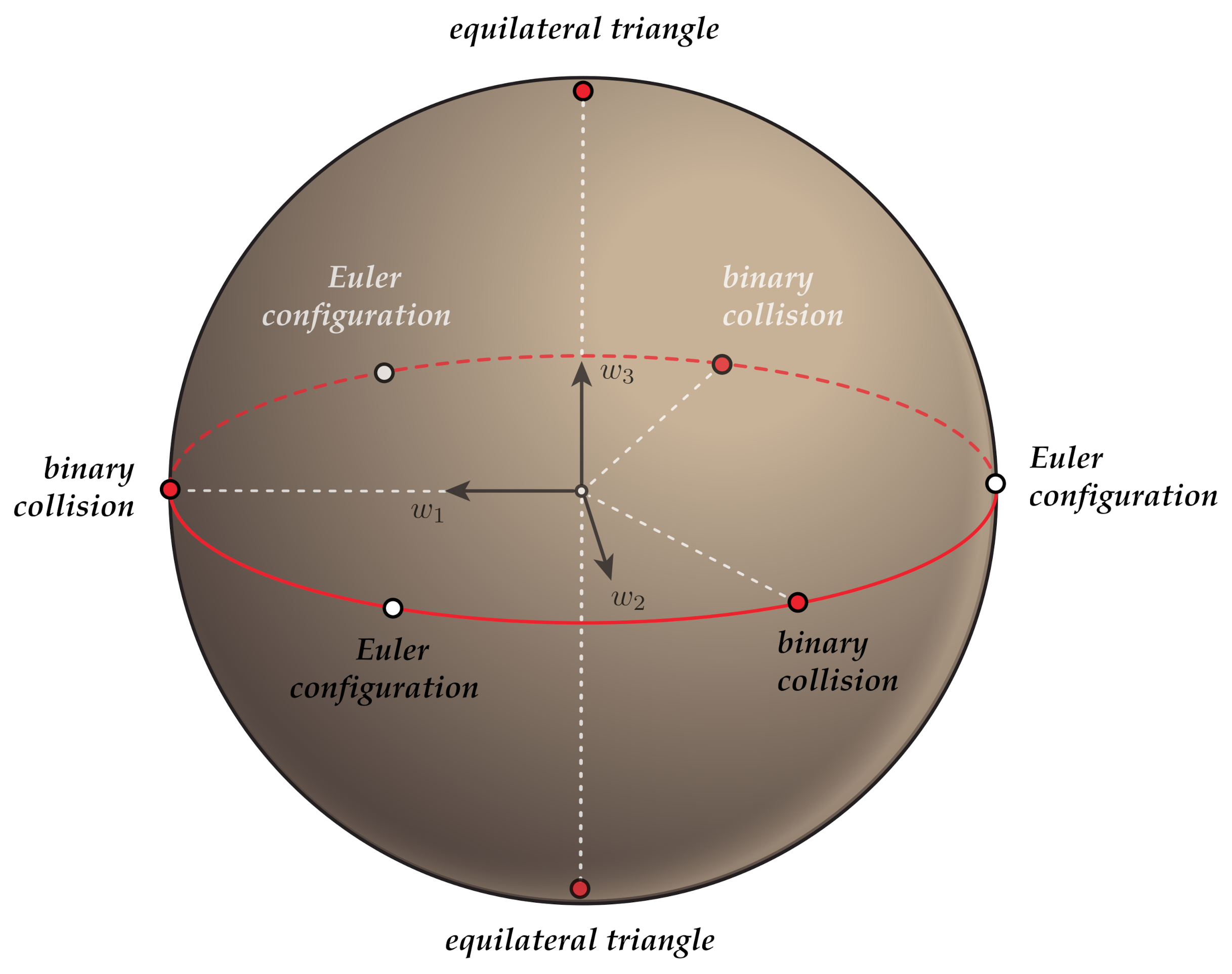
The Euclidean norm of the 3D vector
is proportional to (one quarter) the square of the moment of inertia
so the angular coordinates in the three-space
coordinatize shape space, which has the topology of a sphere [
14]. We call it the
shape sphere, and in
Figure 1 we describe its salient features.
The norms of the original Jacobi coordinate vectors can be written as
and, therefore, the full vectors are specified by
where
is an overall orientation angle which is not rotation-invariant and, therefore, is not fixed by the specification of the coordinates
; and
is the angle between
and
.
We now want to find the momenta conjugate to
. To do so, we consider the symplectic potential
If we replace
with their expressions in terms of
from Equation (
47), we get
where
so we now have a complete canonical transformation from the coordinates (
,
,
;
,
,
) to (
,
,
,
,
;
,
,
,
,
). The Poisson brackets in these coordinates are canonical, as they should be:
In the new coordinates, the kinetic energy decomposes as
and Newton’s potential takes the form
where
are the longitudes on the shape sphere of the two-body collisions between particle
a and
b. These can be found by using Equation (
44):
If
, then
, and, therefore,
, and
: we are on the equator and on the axis 1. Moreover
, so
If
, then
, and, therefore,
and we are on the equator. The 1 and 2 coordinates have values
and
, and so the corresponding longitude is:
If
, the same reasoning above applies to show that we are on the equator, because
is parallel to
. Then
, and
, and the longitude is then
If we call
the azimuthal and
the polar angle on the shape sphere, then
and on the constraint surface
the Hamiltonian takes the form
where
is the 3-body “complexity function” (according to the nomenclature used in [
8,
13,
15,
16]). Finally, a short calculation reveals that the dilatational momentum takes basically the same form in the new coordinates:
We now want to separate the scale and shape degrees of freedom. Let us use
as our scale, and the angles
and
as our shape coordinates. The symplectic potential now takes the form
where
which can be inverted as
which puts the Hamiltonian in the following form:
where the kinetic term
K is a quadratic form in the momenta
,
and
, which is positive definite for any value of
and
:
In the zero angular momentum case
, the equations of motion are:
and in Lagrangian form:
Finally, in the new coordinates the dilatational momentum is of the following form:
3.2. Total Collisions in the Zero-Energy 3-Body Problem
In the previous subsection we described the phase space reduction of the 3-body problem (in the planar case, i.e.,
orthogonal to the plane of the three bodies) to shape degrees of freedom plus scale (the square root of the moment of inertia). We ended up with a spherical shape space coordinatized by two angles,
and
, plus a global orientation angle
and the scale
, as well as their four conjugate momenta
,
,
, and
with canonical symplectic structure. If we specialize to the zero angular momentum case
(the only case we are interested in if we want to study total collisions), the coordinate
drops out of the problem too, because it is cyclic, and we are left with two shape-space coordinates plus one scale, and their conjugate momenta. Conservation of energy is expressed by the following constraint equation:
where
E is a constant (the total energy of the system),
K is the shape kinetic energy, written in Equation (
65), and
is what we have been calling (see [
8,
13,
15,
16]) the complexity function, as defined in Equation (
59).
is positive-definite, and we will study the vicinity of one of its stationary points, of coordinates
. The equations of motion in Newtonian time for the scale degree of freedom are:
which proves that the dilatational momentum
is monotonic. Since
D is monotonic, we can use it as an internal time parameter
with
.
Note that, already at this point, the Hamiltonian constraint, together with the fact that
at total collisions (which follows from the Lagrange–Jacobi equation, see above), implies that total collisions can happen only if the angular momentum and the shape momenta are all zero. In fact, multiplying (
69) by
, we obtain:
which, in the limit
and
, implies
, and
K is a positive-definite quadratic form in
,
, and
(
65).
As mentioned above, given that
is monotonic, we can use it as an internal time parameter. Now the evolution with respect to
, in the zero-energy case
, is described by the shape Hamiltonian
, the canonical conjugate of
expressed in terms of the shape variables by means of the Hamiltonian constraint
(we obtain a reduced Hamiltonian dynamics on shape space precisely because
D, our new internal time parameter, is the dilatational momentum, i.e., the generator of scalings, cf. [
8]). To determine
, we thus demand
, so that
is the logarithm of the solution of
with respect to
r. With
replaced by
, it is:
It follows that the equations of motion of the “decoupled system” are
We would now like to impose that the system undergoes a total collision. By what we have seen in the previous section, this can only happen at a central configuration (the stationary points of
), and with vanishing dilatational momentum (
). However, imposing that the solution goes through a central configuration at the instant
is not enough: it could simply be reaching a minimum of the moment of inertia (a Janus point) with the shape of a central configuration, and, past this minimum, grow again without ever hitting a total collision. In order to get an actual total collision, the moment of inertia has to vanish, that is, we need to have that
. However, according to Equation (
73),
r is no longer part of our description of the system (at this level of description, we already are on shape space). The problem is now: if all I have is system (
73), how can I tell whether I reached a total collision or simply a
Janus point with the shape of a central configuration? Is there a ‘manifest cause’ for a total collision, which can be read off the curve on shape space?
The answer is yes: if some shape momenta
and
are non-zero at a central configuration, Equation (
73) tend to those of a spherical geodesic (in case the central configuration is on the equator of our coordinate system, the term associated to the non-zero Christoffel symbols of the spherical metric on shape space,
, vanishes, and the equations reduce to those of a straight line). Otherwise, if both
and
, Equation (
73) appear to diverge. Indeed, it turns out that at a total collision the shape momenta must vanish (compare the remark above). Reconsider the Hamiltonian constraint (
69) and multiply it by
:
We know, from the discussion of the previous sections, that the dilatational momentum vanishes at a total collision, and, therefore,
. Moreover, the complexity function remains bounded, and the quantity
E is a constant of motion, so, in the limit
,
must vanish, which implies
and
(cf. Reichert [
17]). This is a remarkable result in itself, for it tells us that there exists a unique description of total collisions on (scale-free) shape space.
We conclude that, in order to discuss a total collision, we need to focus on those solutions of Equation (
73) which are perfectly tuned to reach a central configuration with exactly zero shape momenta. Let us now expand Equation (
73) in the vicinity of a central configuration
,
, and assume for simplicity that our coordinate system places this central configuration on the equator (i.e.,
):
where
are the components of the Hessian matrix of the logarithm of the complexity function at the central configuration.
Now we can assume that
and
are small, too, as we want to focus on a total collision which will make them vanish at
, so we can write
and
and expand at first order in
:
This last step killed the Christoffel term, and gave us a set of linear equations that can be diagonalized and solved.
3.3. Asymptotics of Total-Collision Solutions
Equation (
76) can be diagonalized. Let
be the
i-th eigenvalue of the Hessian matrix
H with components
. Then,
where
is the diagonalized matrix (with eigenvalues
as diagonal entries) and
T is composed of the normalized eigenvectors. Multiply Equation (
76) from the left with
T and you obtain:
with
As a system of first-order ODEs, the above clearly does not satisfy the Picard–Lindelöf theorem at : the right-hand side of the first equation is not continuous there, let alone Lipshitz-continuous.
To solve the above equations, multiply the first by
and differentiate:
and, replacing the second equation to eliminate
:
Now, the solutions of an equation of this form can be looked in the form of a monomial
, which, when replaced in the equation, leads to the characteristic polynomial equation:
The above equation admits two solutions:
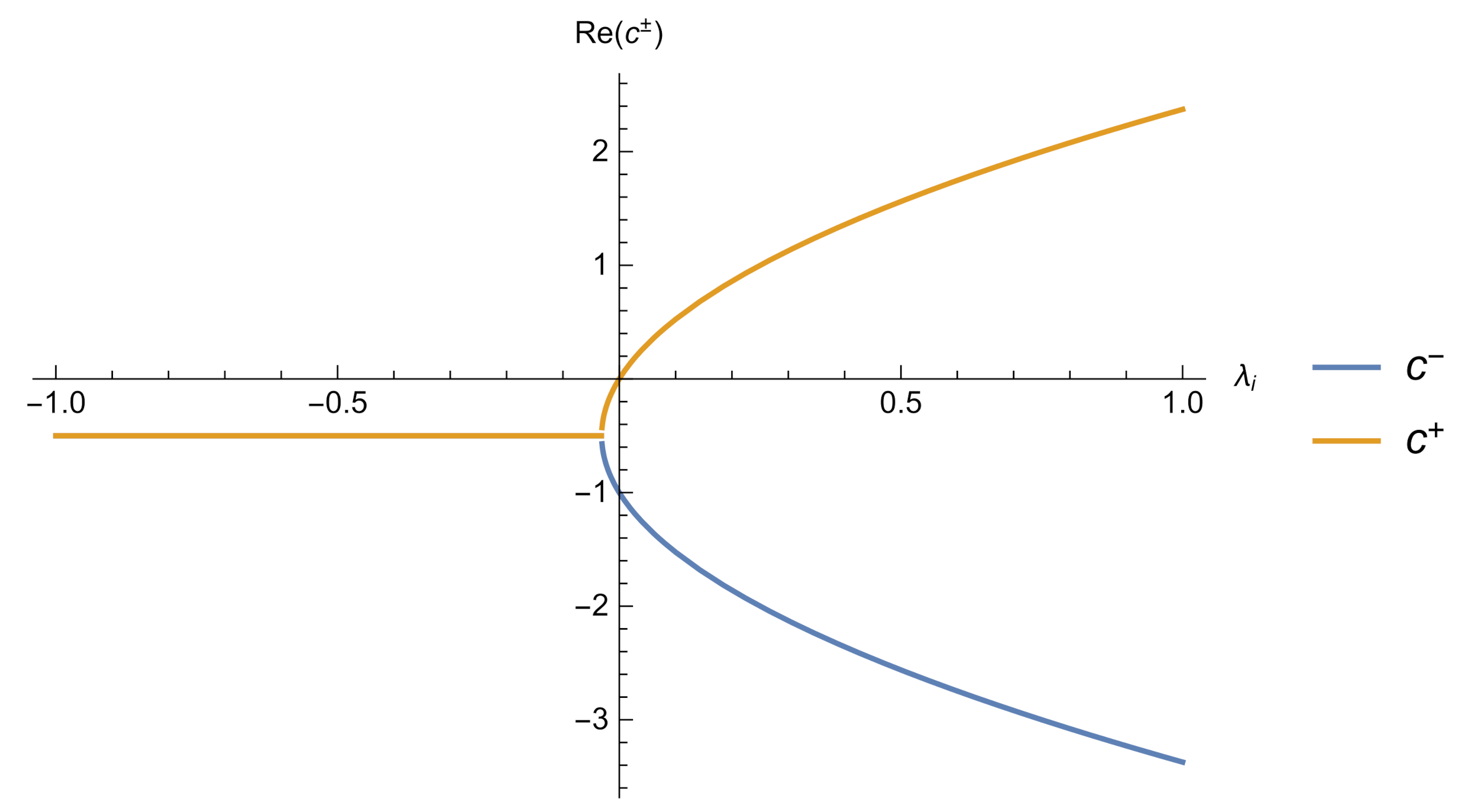
, and, therefore, the general solution of the differential equation is:
We plot here the real part of
vs.
(
Figure 2):
We can see how if is negative (as can happen at a saddle point of the shape potential), then the real part of both and is negative. This means that, if we want to impose that the solution converges as , we will have to set for each negative eigenvlue.
If the eigenvalue is positive, then we see from the plot that while for all , so we have to set .
3.4. Generalization to Arbitrary N and Non-Zero Energy
To generalize the result from
to arbitrary
N, we consider the kinetic metric on the extended configuration space:
this, in terms of the mass-rescaled Jacobi coordinates, becomes
where
coordinatize the
relative configuration space (the configuration space quotiented by translations).
Now, we can separate the scale and the scale-invariant degrees of freedom by defining the (square root of the) center-of-mass moment of inertia, the
scale coordinate:
and the translation-invariant configuration space appears now as the Cartesian product between the scale coordinate
and a
-dimensional hypersphere which we call pre shape space. (Pre shape space is the quotient of the extended configuration space,
, by dilatations and translations alone (keeping the redundance due to rotations)).
To further quotient global rotations out, we need to exploit the fact that they act as an
subgroup of the rotation group
that realizes the isometries of the
-sphere of pre shape space. Quotienting a sphere by a subgroup of its rotation group always results in another sphere. In our case, the end result is a
-sphere: shape space. The kinetic metric then decomposes according to an analog formula to Chazy’s kinetic energy decomposition theorem and, in the hyperspherical coordinates on pre-shape space, can be written as
There are
conjugate momenta to
,
,
, one conjugate momentum to
r,
, 3 conjugate momenta to
,
and 3 components of the total angular momentum
. The kinetic energy can then be decomposed as
where
is the inverse of the hyperspherical metric, and the Newton potential can be written as
with no dependence on the coordinates of the center of mass, which of course implies that their equations of motion are
and their motion can be decoupled from the rest. Assuming now that the angular momentum is zero, and after reabsorbing the kinetic energy of the center of mass into
E, the Hamiltonian constraint takes the form
If the total energy
E is zero, by replacing
, and solving for
r, we get a unique solution:
and the corresponding pre-shape space Hamiltonian is:
the structure of the equations is identical to those for the 3-body problem (
73). If now we expand to first order around
(the coordinates of a central configuration), and
, we get:
where
is the Hessian matrix. Now, the Hessian can be diagonalized as before, but there are three zero eigenvalues associated to the directions corresponding to global rotations. For these, we have to put the corresponding momenta to zero, because they are equal to the three components of the total angular momentum of the system, and, unless that is zero, the total collision cannot take place. For those three pre-shape space degrees of freedom, therefore, the equations of motion just say that they are constants, and their conjugate momenta are zero. One is then left with
effective equations, one for each independent true shape degree of freedom, of the form:
with
real constants depending only on the mass ratios
.
If the total energy is not zero, one has a quadratic equation to solve for
r, but to avoid having to deal with multiple solutions we can exploit the fact that
r is small near the total collision, and solve the Hamiltonian constraint perturbatively:
so
The corresponding equations of motion acquire deformation terms which, at first order in
and
, take the form:
and both deformation terms are irrelevant as
, compared to the undeformed one which diverge like
.
3.5. The Stratified Manifold of the Total-Collision Solutions
Each central configuration comes with real eigenvalues . Depending on the nature of the central configurations, they may all be positive (if we are at the minimum of —the equilateral triangle in the case—which has been conjectured to be unique for all N), or some of them may be negative (in the case of a saddle point, like the three collinear Euler configurations in the three-body problem).
From
Figure 2, we see that each negative eigenvalue corresponds to a pair of exponents
,
with negative real part, and therefore the corresponding shape degree of freedom cannot hope to converge to its central-configuration value, unless both integration constants
and
are set to zero. On the other hand, for each positive eigenvalue, the integration constant
has to be put to zero in order for the solution to converge.
Let us assume first that, at the central configuration of interest, there are
Mdistinct positive
’s and
negative ones, and assume also that the positive eigenvalues are ordered from smallest to largest,
. Then only
M integration constants remain unspecified, and the solutions are of the following form:
The above describe a
-parameter family of distinguished solutions, because any two choices of integration constants,
and
that are related by
describe the same curve in shape space, just parametrized differently. Within this
-dimensional manifold, there are special regions corresponding to the cases in which certain integration constants are zero. Let us, in what follows, list all the possible distinct cases.
If
, then the solution curves all approach the central configuration with the same tangent, parallel to the principal eigendirection
(the one corresponding to the largest eigenvalue), and away from it they splay out in all
directions, at a pace that is determined by the values of the other integration constants
. This is easy to prove: the tangent vector to the parametrized curves is
, and normalizing it to one we get a vector that, in the limit
, tends to
. Moreover, these solutions can be divided in two disjoint components, according to whether
is positive or negative. The former approach the central configuration along the positive-
axis, the latter along the negative one. In
Figure 3, we show an example of this family of solutions for the 3-body problem.
If is zero, but , the solutions lie in the subspace, and the analysis exposed above can be repeated within this subspace, this time with playing the role of principal eigenvalue. The solutions all approach the central configuration tangentially to the axis, and they divide into two connected components, according to the sign of ;
If , , then the solution lies in the subspace , and the role of principal eigendirection is played by , and the solutions are asymptotically tangent to , and belong to two disconnected components, according to the sign of ;
If only , then there are only two solutions, which remain always on the positive (respectively negative) axis;
Finally, if all the are zero, the solution is only the homothetic one, which never changes shape as it falls into a total collision.
What we just described is a stratified manifold of solutions, in which each stratum is obtained from the higher one as the special case in which the first non-zero integration constant of the stratum above is set to zero.
In the case of degenerate eigenspaces (when two or more eigenvalues are identical, which happens for example in the three-body problem when the three masses are equal), the count of free integration constants does not change, and, therefore, the dimension of the space of solution is the same as above, as is its structure as stratified manifold. What changes is the fact that, when the degenerate eigenvalue is the principal one (because it is the smallest, or because the integration constants associated to the eigendirections of smaller eigenvalues have been all put to zero), the solution curve can approach the total collision from any direction within the degenerate eigenspace.
3.6. The Essential Singularity of Total Collisions
In the previous subsection, we have shown how the total-collision solutions can only approach the central configuration along one of the eigendirections of the Hessian matrix that are associated to a positive eigenvalue. Moreover, we have shown that, in the case of distinct eigenvalues, the solutions that approach the total collision from the eigendirection associated to the lowest positive eigenvalue are just two. The ones approaching it from the second-smallest eigendirection are two disjoint one-parameter families; the ones approaching from the third-smallest eigendirection are two disjoint two-parameter families, and so on, all the way to the highest stratum, which consists of two disjoint -parameters families of solutions. The largest possible stratum of solutions for N particles can be obtained in the case in which all eigenvalues are positive, which means that the corresponding central configuration is a minimum of the complexity function. Then, there is a stratum which is (-dimensional. So, for example, in the unequal-mass three-body problem, if the total collision asymptotes to an equilateral triangle (the absolute minimum of the complexity function), we get two one-parameter families of solutions.
We know what the tangent to these solution curves does, but knowing the tangent is not enough to fix all integration constants
, while the values of the integration constants determine the solution. Since we are interested in investigating the possibility of continuing each solution in a unique way through the total collision, we want to check whether there exist some variables whose values fix all integration constants, and are well-defined at the total collision. One might look for such ‘manifest causes’ in the geometry of the curve on shape space, which, according to the conjecture at the basis of shape dynamics, captures all there is to know about physical reality. However, one can show that, in the generic case (that is, when none of the constants
are commensurable), no differential quantity defined on shape space can fix these integration constants, because at total collisions we have an
essentialsingularity. We can see this in this way. Consider the normalized
-derivative vector of our solution curve:
As
, this quantity asymptotes to
So, imagine we want to join two curves that asymptote to the same central configuration, characterized by integration constants
and
, one reaching the total collision from below (
) and one from above (
). They both reach the same point at
, so whatever pair of curves we choose, they will always be continuous. Now, ask that their tangent is continuous: we want the normalized first derivatives to match. This imposes
that is, the two curves have to approach
from the two opposite directions. This can be immediately seen from
Figure 3 in the 3-body case. However, if now we hope to fix any further relations between integration constants by asking that any further normalized derivative is continuous, we are disappointed. Once we assume that
and
have opposite signs, all derivatives are automatically continuous. We could join any two curves in
Figure 3, provided they live in opposite sides of the black axis, and they would always be infinitely differentiable. This is a behavior that signals the presence of an essential singularity: for example the function
at
tends to zero, as do all of its derivatives. This function is not analytic in zero, because it is the inverse of
, which is a textbook example of essential singularity (the function and all of its derivatives diverge in zero).
There are exceptions to this result, in the exceptional case in which, due to the particular values of the eigenvalues and , the ratio of the associated constants is a rational number. Then, in this case, there exist integers and , such that the variables and admit the finite ratio at , which allows us to extract some information on the integration constants and at the singularity. Then, if all M positive eigenvalues are such that the corresponding constants are commensurable, we can define a set of M variables, by raising the to appropriate integer powers, that all tend to zero at as the same power of . The simplest such case is that of all-equal eigenvalues, where all converge to zero with the same power law. Then, in this case, all solutions can be continued uniquely at the singularity, and there is a simple change of variables that makes the equations of motion regular there. These cases, however, account for a countable set of choices of masses, and the generic situation is that described above, of an essential singularity preventing continuation.



{kind=link}
{kind=link}
{kind=link}