
A Model Predictive Control with Preview-Follower Theory Algorithm for Trajectory Tracking Control in Autonomous Vehicles


Abstract
1. Introduction
- (1)
- Predicting the process output at a finite control horizon on account of past and current values;
- (2)
- Calculating a control sequence by the optimizer taking into account the cost function and the constraints;
- (3)
- Taking the first control actions at each moment, and repeating the procedure in a receding horizon.
2. Vehicle Dynamics Modeling for Predictive Model of MPC
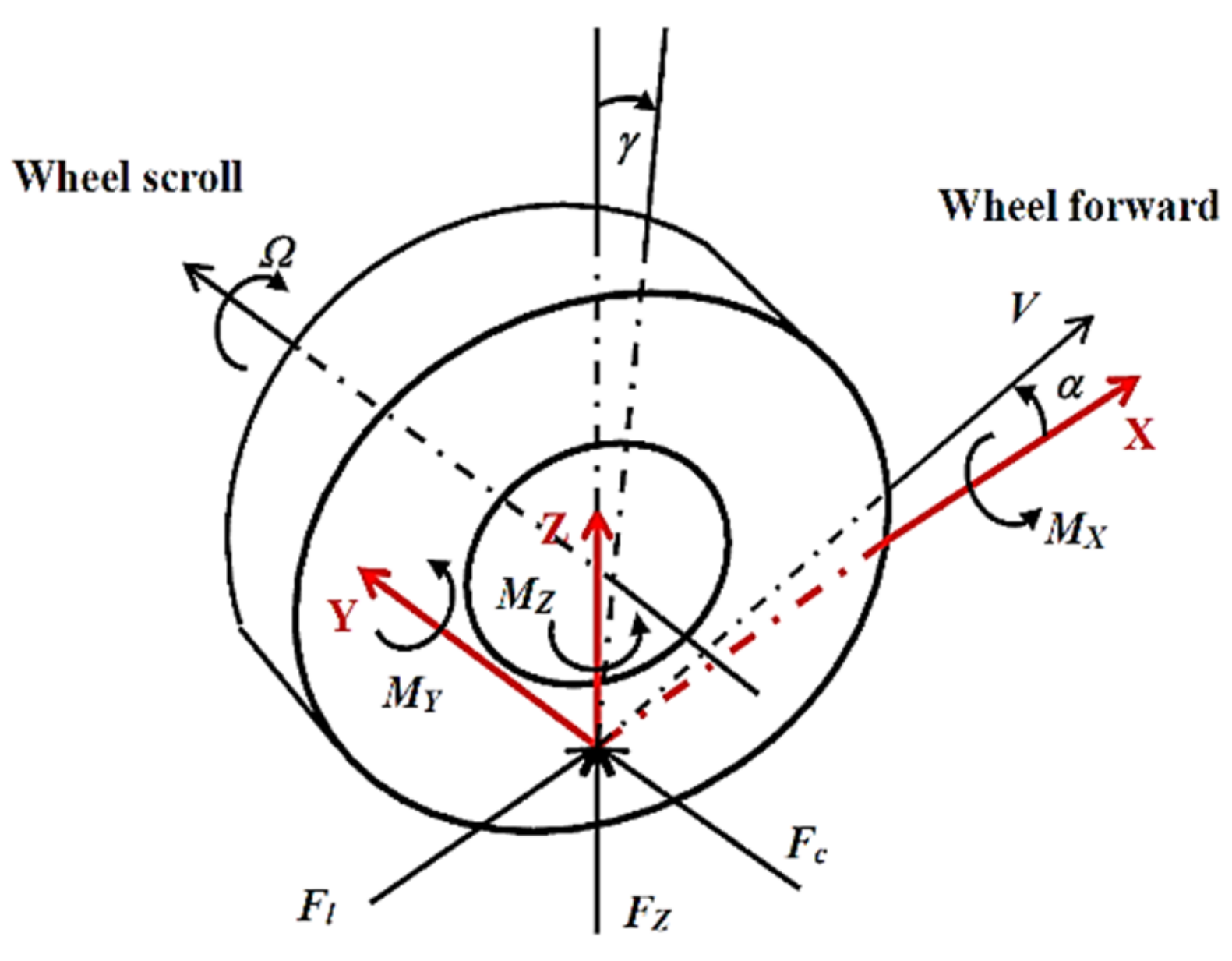
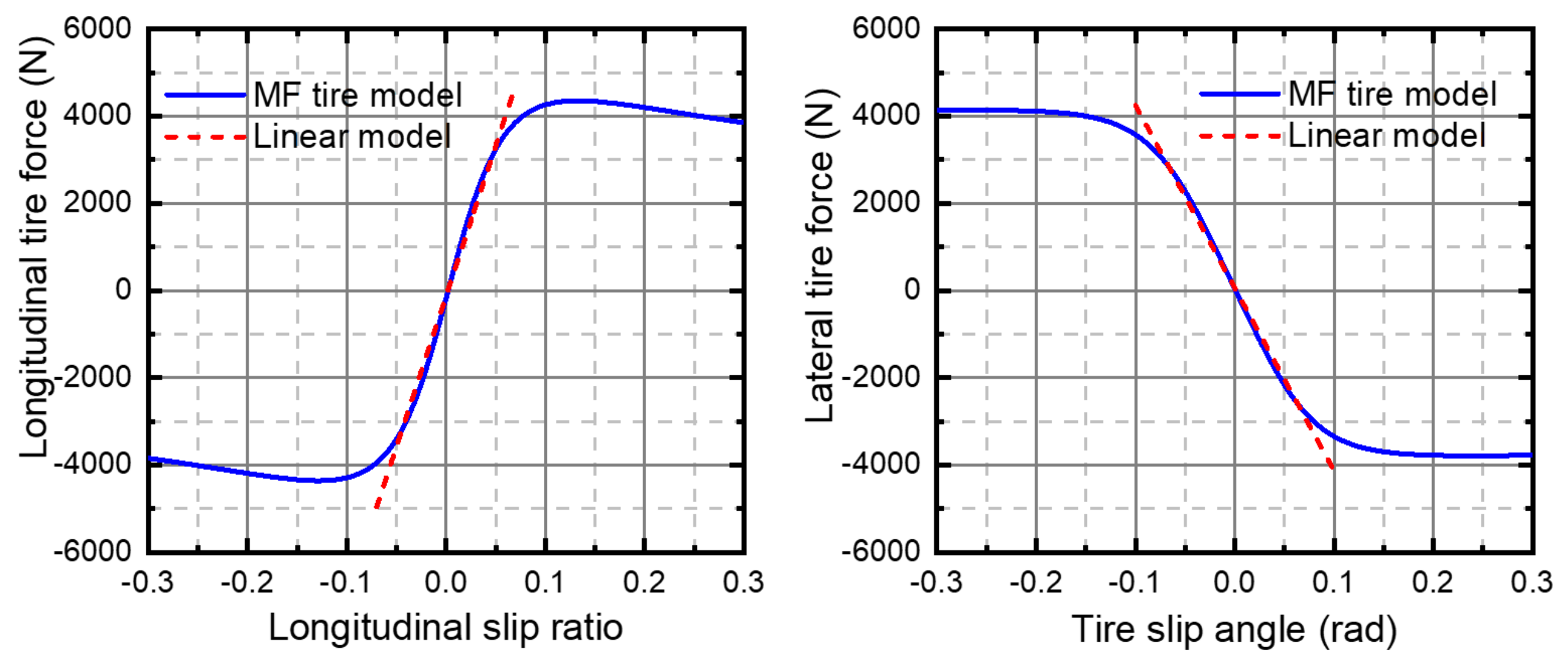
2.1. Linear Tire Model
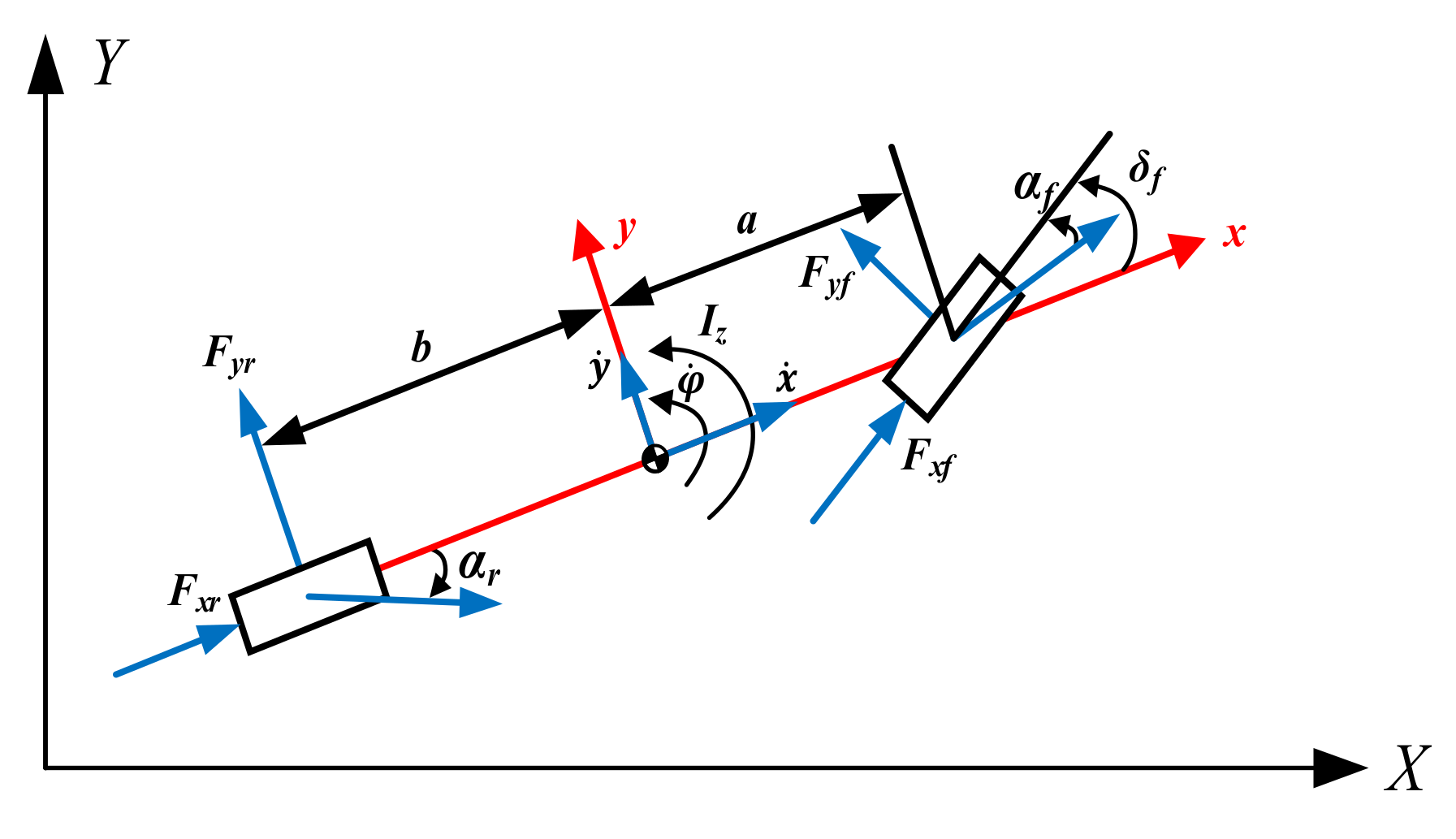
2.2. Vehicle Dynamics Model
- (1)
- Lumping the left and right tires together at the front and rear wheel axels.
- (2)
- Controlling the front wheel angle only.
- (3)
- Traveling at a constant longitudinal velocity.
3. Design of Control Strategy Basing on MPC-PFT
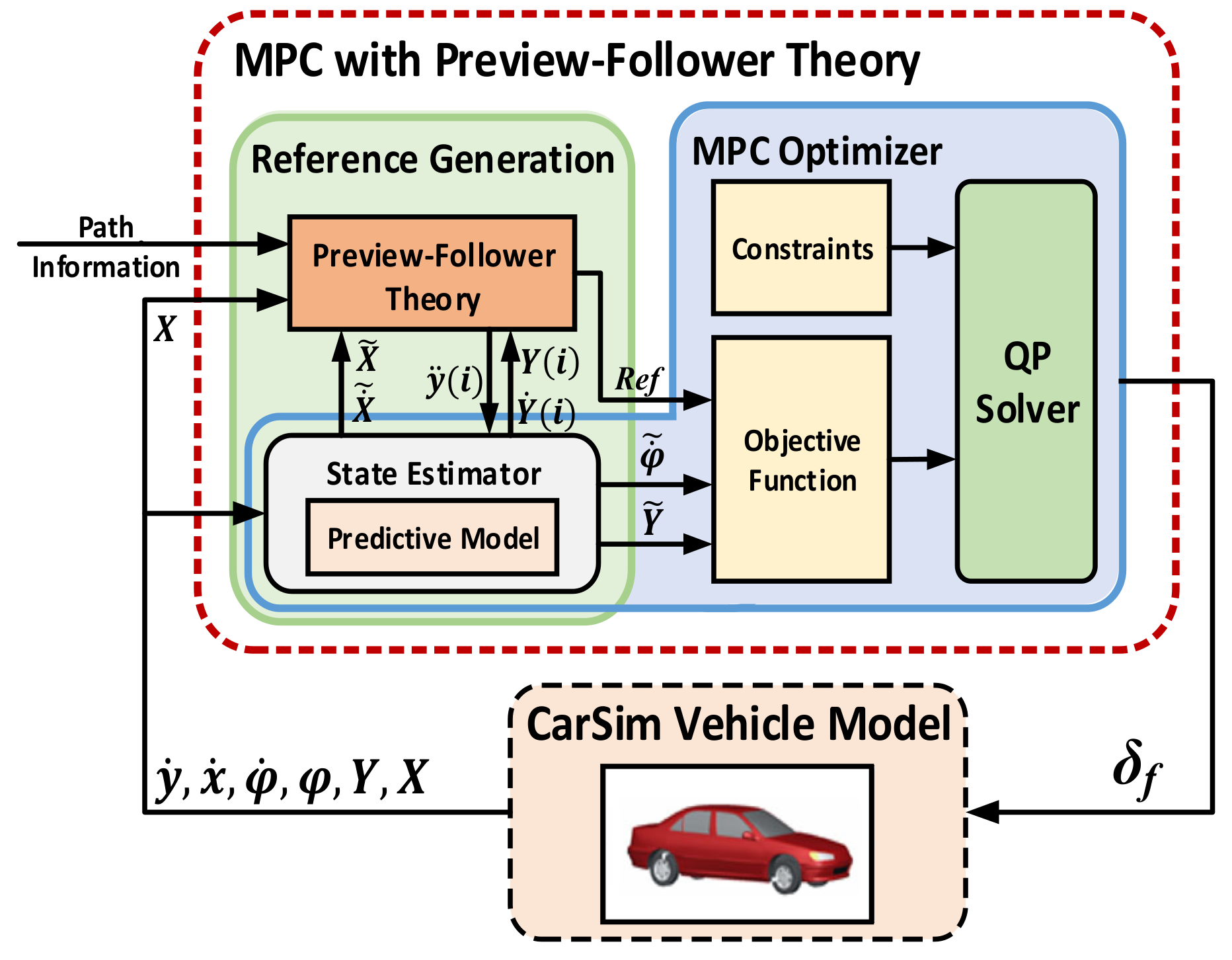
3.1. Overview of the MPC-PFT Theory
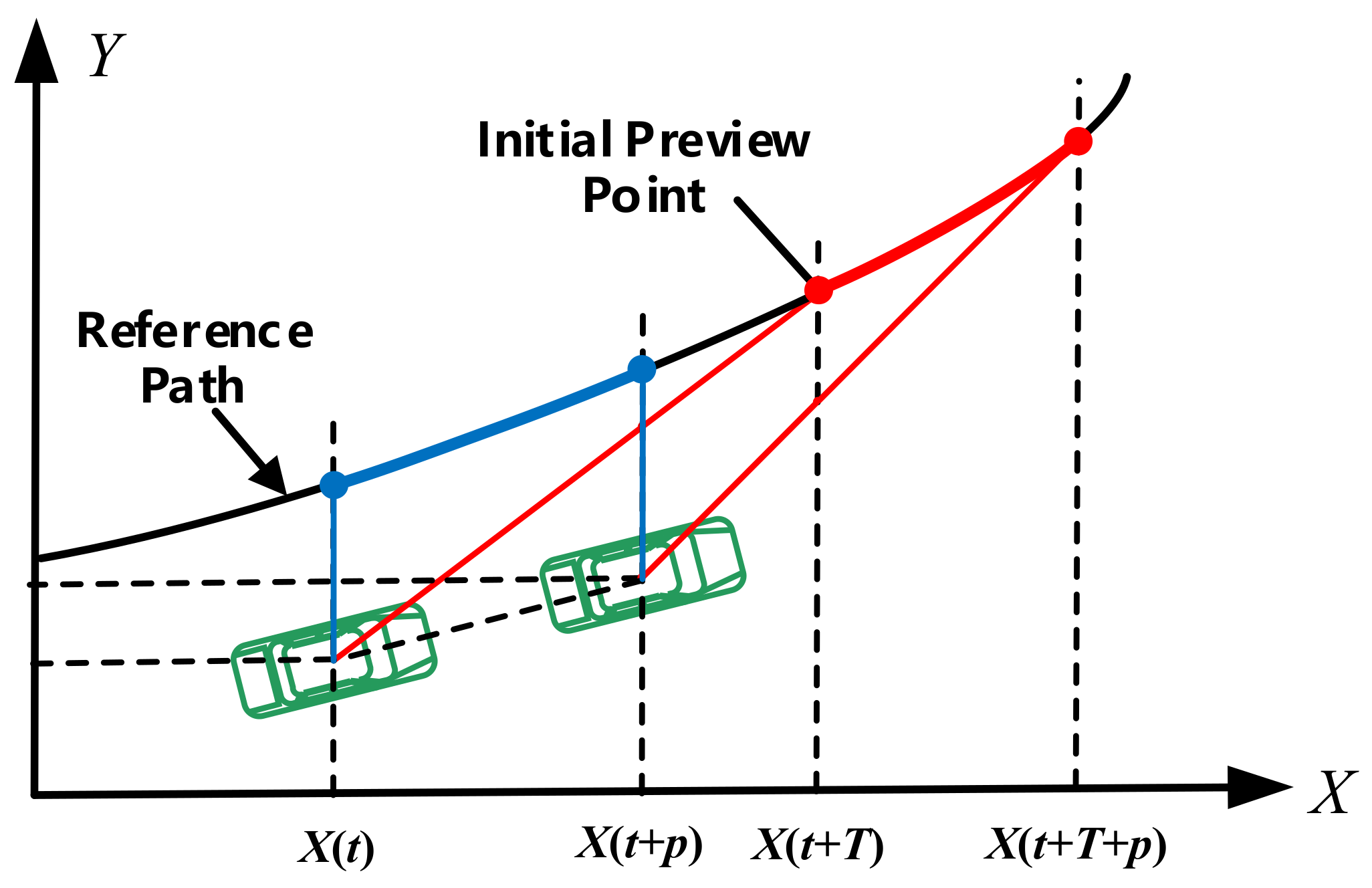
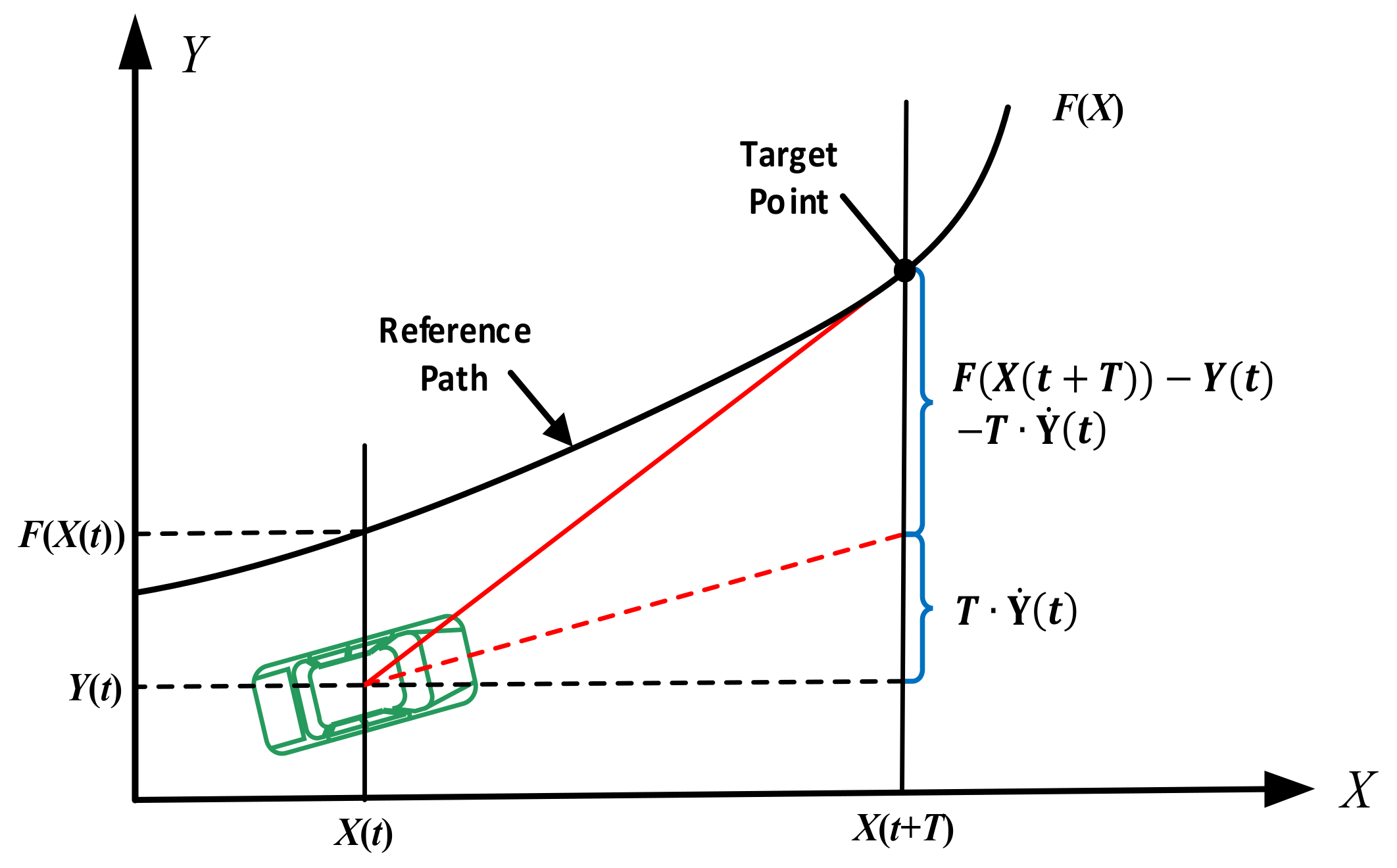
3.2. Preview Follower Theory
3.3. Strategy of MPC-PFT
3.3.1. Control Scheme of MPC-PFT
3.3.2. Reference Trajectory Generation
| Algorithm 1 Reference yaw rate generation |
| Input: Vehicle longitudinal speed, lateral speed, longitudinal position, and lateral position at the time k are denoted by , , , and . Output: Vehicle reference yaw rate at the time k. Repeat until getting Np reference point, or . Step 1: State estimator: generate via , where is the sample time, represents the prediction point. Step 2: Update: and by and . Step 3: Preview-Follower Theory: obtain and by optimal preview driver model: where and are the reference lateral acceleration and yaw rate at the prediction point, respectively. Step 4: . End repeat |
3.3.3. Approximation of Linear Time Varying (LTV) Model
3.3.4. Formulation and Calculation of MPC Problem
4. Simulation Results and Analysis
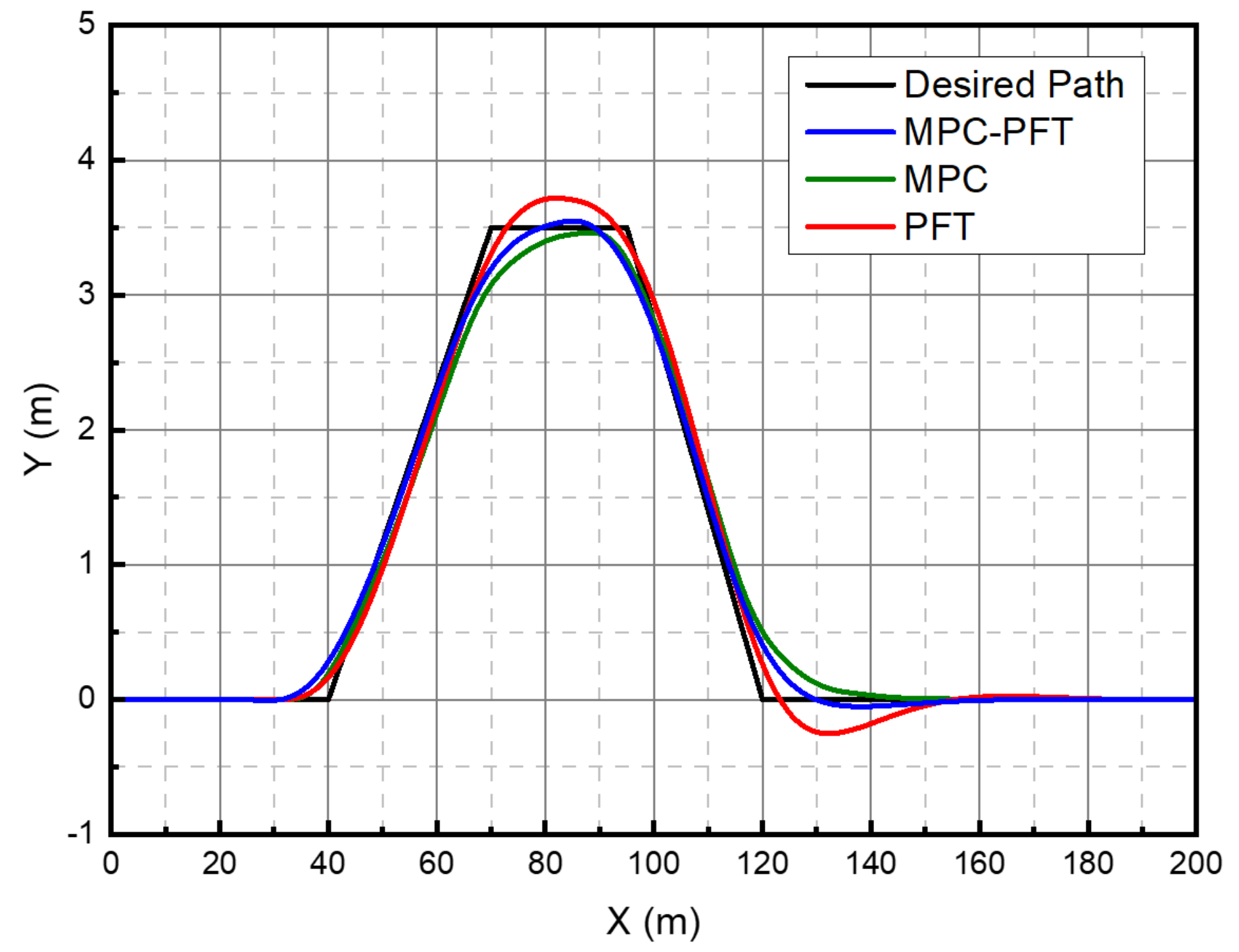
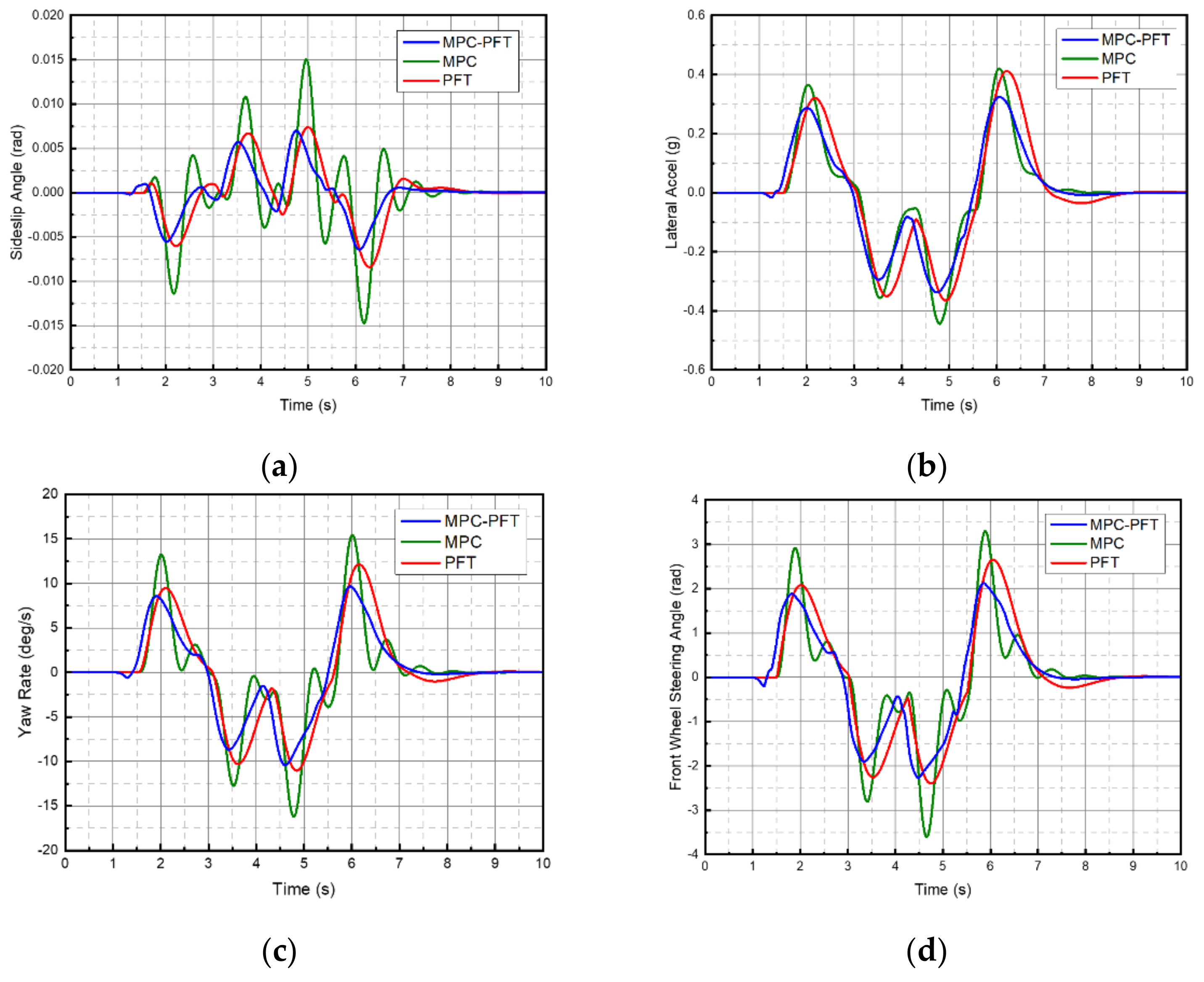
4.1. Double Lane Change (DLC) Maneuver
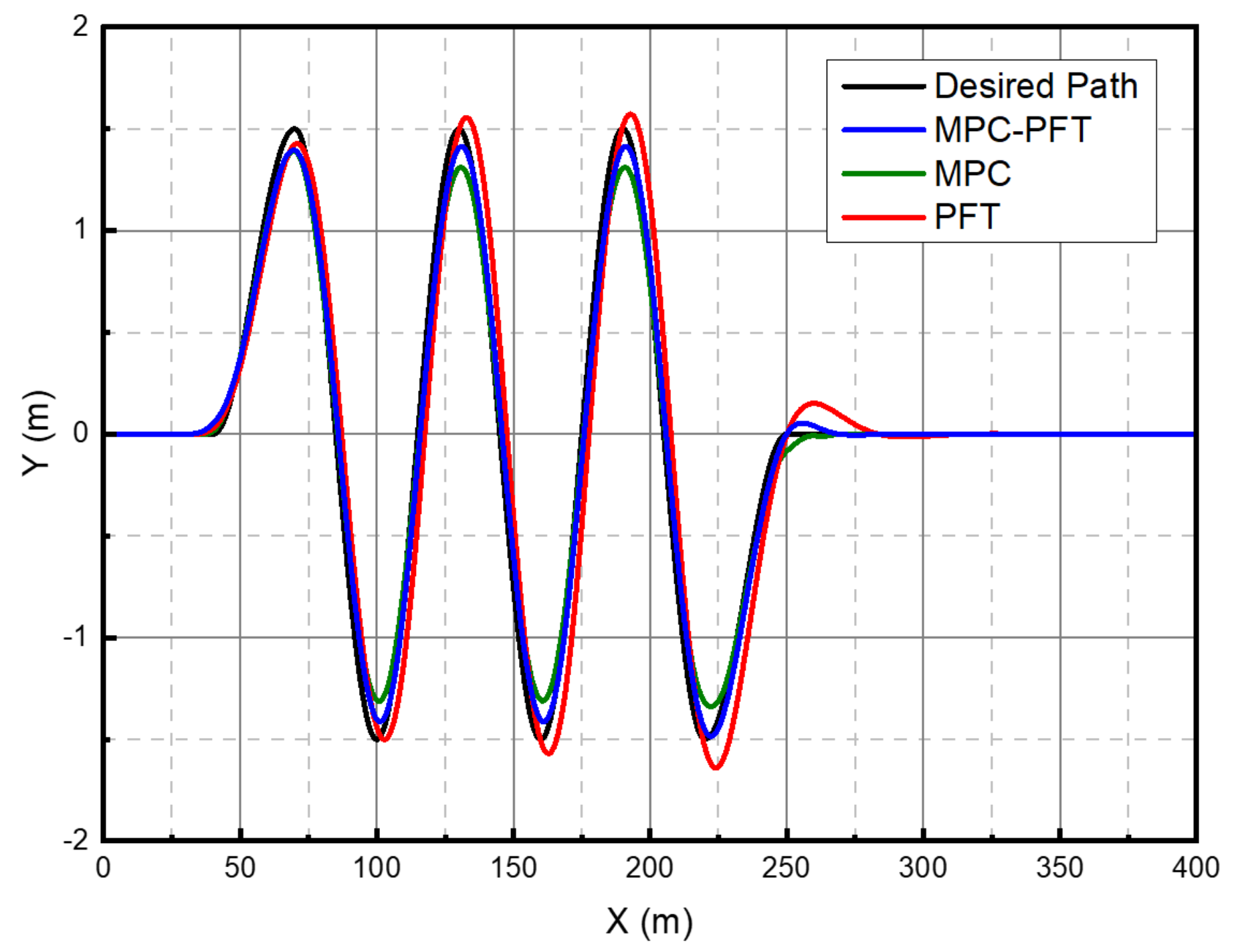
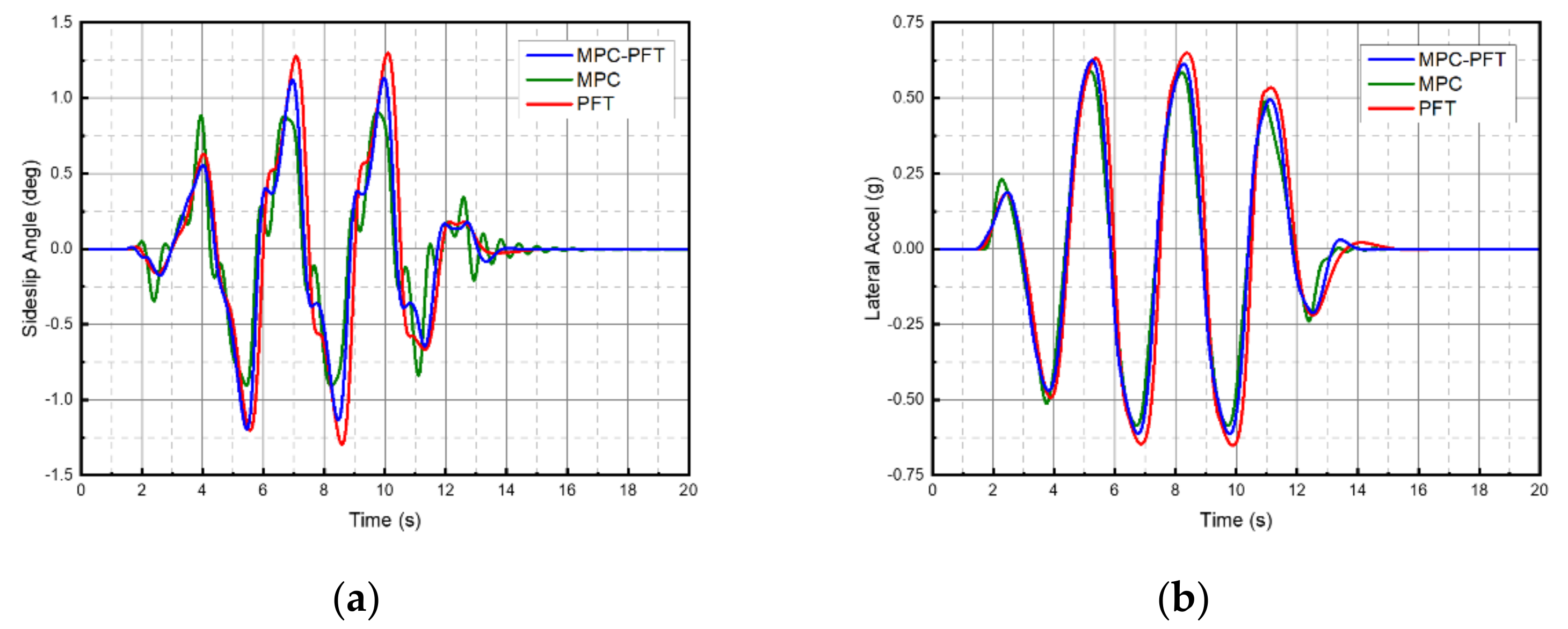
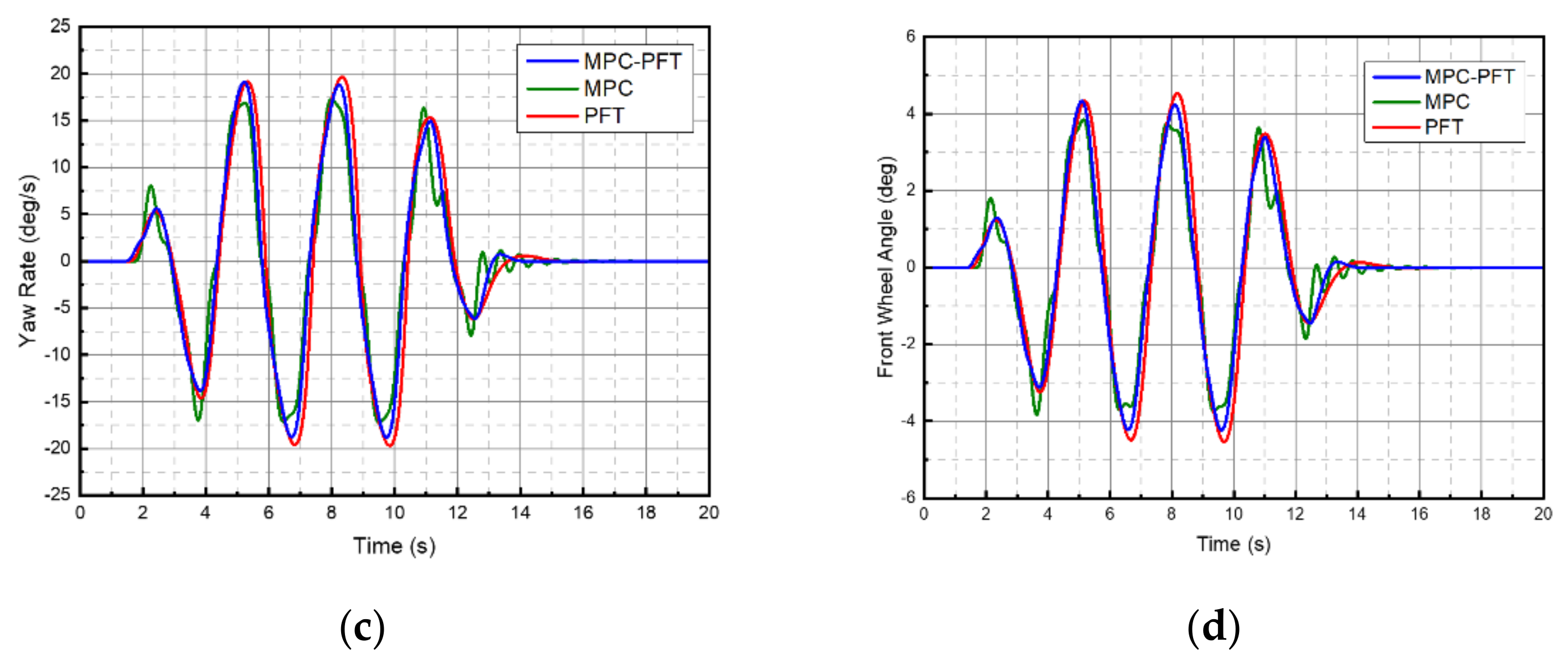
4.2. Slalom Maneuver
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2015; World Health Organization: Geneva, Switzerland, 2015. [Google Scholar]
- Han, Y.; Cheng, Y.; Xu, G. Trajectory tracking control of AGV based on sliding mode control with the improved reaching law. IEEE Access 2019, 7, 20748–20755. [Google Scholar] [CrossRef]
- Lee, S.H.; Lee, Y.O.; Kim, B.A. Proximate model predictive control strategy for autonomous vehicle lateral control. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 3605–3610. [Google Scholar]
- Yan, F.; Li, B.; Shi, W.; Wang, D. Hybrid visual servo trajectory tracking of wheeled mobile robots. IEEE Access 2018, 6, 24291–24298. [Google Scholar] [CrossRef]
- Peng, S.; Shi, W. Adaptive fuzzy output feedback control of a nonholonomic wheeled mobile robot. IEEE Access 2018, 6, 43414–43424. [Google Scholar] [CrossRef]
- Levinson, J.; Askeland, J.; Becker, J. Towards fully autonomous driving: Systems and algorithms. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; pp. 163–168. [Google Scholar]
- MacAdam, C.C. Application of an optimal preview control for simulation of closed-loop automobile driving. IEEE Trans. Syst. Man Cyber. 1981, 11, 393–399. [Google Scholar] [CrossRef]
- Guo, K.; Fancher, P. Preview-Follower method for modelling closed-loop vehicle directional control. In Proceedings of the Nineteenth Annual Conference on Manual Control, Cambridge, MA, USA, 1 January 1983. [Google Scholar]
- Sharp, R.; Casanova, D.; Symonds, P. A mathematical model for driver steering control with design tuning and performance results. Veh. Syst. Dyn. 2000, 33, 289–326. [Google Scholar]
- Guo, K.; Cheng, Y.; Ding, Y. Analytical method for modeling driver in vehicle directional control. Veh. Syst. Dyn. 2004, 41, 401–410. [Google Scholar]
- Ding, H.; Guo, K.; Wan, F. An analytical driver model for arbitrary path following at varying vehicle speed. Veh. Syst. Dyn. 2008, 5, 204–218. [Google Scholar] [CrossRef]
- Cao, J.; Lu, H.; Guo, K.; Zhang, J. A driver modeling based on the preview-follower theory and the jerky dynamics. Math. Prob. Eng. 2013, 2013. [Google Scholar] [CrossRef]
- Liu, S. The improved algorithm to preview follower control applied research on intelligent electric vehicle. Adv. Mater. Res. 2015, 1079, 1022–1025. [Google Scholar] [CrossRef]
- Zhang, S.; Zhao, X.; Zhu, G.; Shi, P.; Hao, Y.; Kong, L. Adaptive trajectory tracking control strategy of intelligent vehicle. Int. J. Distrib. Sens. Netw. 2020, 16, 1550147720916988. [Google Scholar] [CrossRef]
- Huang, G.; Yuan, X.; Shi, K.; Liu, Z.; Wu, X. Adaptivity-Enhanced path tracking system for autonomous vehicles at high speeds. IEEE trans. Intell. Transp. Syst. 2020, 5, 626–634. [Google Scholar] [CrossRef]
- Richalet, J.; Rault, A.; Testud, J. Model predictive heuristic control. Automatica 1978, 14, 413–428. [Google Scholar] [CrossRef]
- Camacho, E.F.; Bordons, E. Model predictive control. Int. J. Robust Nonlin. 2008, 18, 799–810. [Google Scholar]
- Ren, B.; Chen, H.; Zhao, H.; Yuan, L. MPC-Based yaw stability control in in-wheel-motored EV via active front steering and motor torque distribution. Mechatronics 2016, 38, 103–114. [Google Scholar] [CrossRef]
- Borrelli, F.; Falcone, P.; Keviczky, T. MPC-Based approach to active steering for autonomous vehicle systems. IJVAS 2005, 3, 265–291. [Google Scholar] [CrossRef]
- Beal, C.; Gerdes, J. Model predictive control for vehicle stabilization at the limits of handling. IEEE Trans. Control Sys. Tech. 2013, 21, 1258–1269. [Google Scholar] [CrossRef]
- Ye, H.; Jiang, H.; Ma, S. Linear model predictive control of automatic parking path tracking with soft constraints. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419852201. [Google Scholar] [CrossRef]
- Zhang, K.; Sun, Q.; Shi, Y. Trajectory tracking control of autonomous ground vehicles using adaptive learning MPC. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–11. [Google Scholar] [CrossRef]
- Zubizarreta, A.; Pinto, C. Robust tube-based model predictive control for lateral path tracking. IEEE trans. Intell. Transp. Syst. 2019, 4, 569–577. [Google Scholar]
- Li, S.E.; Chen, H.; Li, R. Predictive lateral control to stabilise highly automated vehicles at tire-road friction limits. Veh. Syst. Dyn. 2020, 58, 768–786. [Google Scholar] [CrossRef]
- Tang, L.; Yan, F.; Zou, B. An improved kinematic model predictive control for high-speed path tracking of autonomous vehicles. IEEE Access 2020, 8, 51400–51413. [Google Scholar] [CrossRef]
- Sharp, R.; Peng, H. Vehicle dynamics applications of optimal control theory. Veh. Syst. Dyn. 2011, 49, 1073–1111. [Google Scholar] [CrossRef]
- Falcone, P.; Borrelli, F.; Asgari, J. Towards Real-time model predictive control approach for autonomous active steering. In Proceedings of the 6th International Symposium on Advanced Vehicle Control, Taipei, Taiwan, 20–24 August 2006; pp. 599–604. [Google Scholar]
- Falcone, P.; Borrelli, F.; Asgari, J.; Tseng, H.E.; Hrovat, D. Predictive active steering control for autonomous vehicle systems. IEEE Trans. Control Syst. Tech. 2007, 15, 566–580. [Google Scholar] [CrossRef]
- Falcone, P.; Tseng, H.; Borrelli, F.; Asgari, J.; Hrovat, D. MPC-Based yaw and lateral stabilisation via active front steering and braking. Veh. Syst. Dyn. 2008, 46, 611–628. [Google Scholar] [CrossRef]
- Kim, B.; Son, Y.; Lee, S. Model predictive control using dual prediction horizons for lateral control. IFAC Proc. Vol. 2013, 46, 280–285. [Google Scholar] [CrossRef]
- Lee, S.; Chung, C. Multilevel approximate model predictive control and its application to autonomous vehicle active steering. In Proceedings of the 52nd IEEE Conference on Decision and Control, Florence, Italy, 10–13 December 2013; pp. 5746–5751. [Google Scholar]
- Wu, J.; Wang, Z.; Zhang, L. Unbiased-Estimation-Based and computation-efficient adaptive MPC for four-wheel-independently-actuated electric vehicles. Mech. Mach. Theory 2020, 154, 104100. [Google Scholar] [CrossRef]
- Pacejka, H.; Bakker, E. The magic formula tyre model. Veh. Syst. Dyn. 1992, 21, 1–18. [Google Scholar] [CrossRef]
- Doria, A.; Tognazzo, M.; Cusimano, G. Identification of the mechanical properties of bicycle tyres for modelling of bicycle dynamics. Veh. Syst. Dyn. 2013, 51, 405–420. [Google Scholar] [CrossRef]
- Falcone, P.; Borrelli, F.; Asgari, J. A model predictive control approach for combined braking and steering in autonomous vehicles. In Proceedings of the 2007 Mediterranean Conference on Control & Automation, Athens, Greece, 27–29 June 2007; pp. 1–6. [Google Scholar]
- Gao, Y. Model predictive control for autonomous and semiautonomous vehicles. Ph.D. Thesis, UC Berkeley, Berkeley, CA, USA, 2014. [Google Scholar]
- Guo, K. Drivers-Vehicle close-loop simulation of handing by "Preselect Optimal Curvature Method". Auto. Eng. 1984, 3, 1–16. [Google Scholar]
- Falcone, P.; Borrelli, F.; Tseng, H. Linear time-varying model predictive control and its application to active steering systems: Stability analysis and experimental validation. Int. J. Robust Nonlin. 2007, 18, 862–875. [Google Scholar] [CrossRef]
- Falcone, P.; Tufo, M.; Borrelli, F. A linear time varying model predictive control approach to the integrated vehicle dynamics control problem in autonomous systems. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 2980–2985. [Google Scholar]
- Maciejowski, J.M. Predictive Control: With Constraints; Pearson Education: London, UK, 2002. [Google Scholar]
- Wang, L. Model Predictive Control System Design and Implementation Using MATLAB; Springer Science & Business Media: Berlin, Germany, 2009; pp. 25–36. [Google Scholar]
- Cao, H.; Song, X.; Zhao, S. An optimal model-based trajectory following architecture synthesising the lateral adaptive preview strategy and longitudinal velocity planning for highly automated vehicle. Veh. Syst. Dyn. 2017, 55, 1143–1188. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units |
|---|---|---|
| 0.02 | - | |
| 30 | - | |
| 12 | - | |
| 25 | deg | |
| −25 | deg | |
| 0.5 | deg | |
| −0.5 | deg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Tang, W.; Chen, B.; Qiu, L.; Yang, R. A Model Predictive Control with Preview-Follower Theory Algorithm for Trajectory Tracking Control in Autonomous Vehicles. Symmetry 2021, 13, 381. https://doi.org/10.3390/sym13030381
Xu Y, Tang W, Chen B, Qiu L, Yang R. A Model Predictive Control with Preview-Follower Theory Algorithm for Trajectory Tracking Control in Autonomous Vehicles. Symmetry. 2021; 13(3):381. https://doi.org/10.3390/sym13030381
Chicago/Turabian StyleXu, Ying, Wentao Tang, Biyun Chen, Li Qiu, and Rong Yang. 2021. "A Model Predictive Control with Preview-Follower Theory Algorithm for Trajectory Tracking Control in Autonomous Vehicles" Symmetry 13, no. 3: 381. https://doi.org/10.3390/sym13030381
APA StyleXu, Y., Tang, W., Chen, B., Qiu, L., & Yang, R. (2021). A Model Predictive Control with Preview-Follower Theory Algorithm for Trajectory Tracking Control in Autonomous Vehicles. Symmetry, 13(3), 381. https://doi.org/10.3390/sym13030381