
Analysis and Suppression of the Eddy Current Damping Force of the Cooling Plate of a Permanent Magnet Linear Motor



Abstract
:1. Introduction
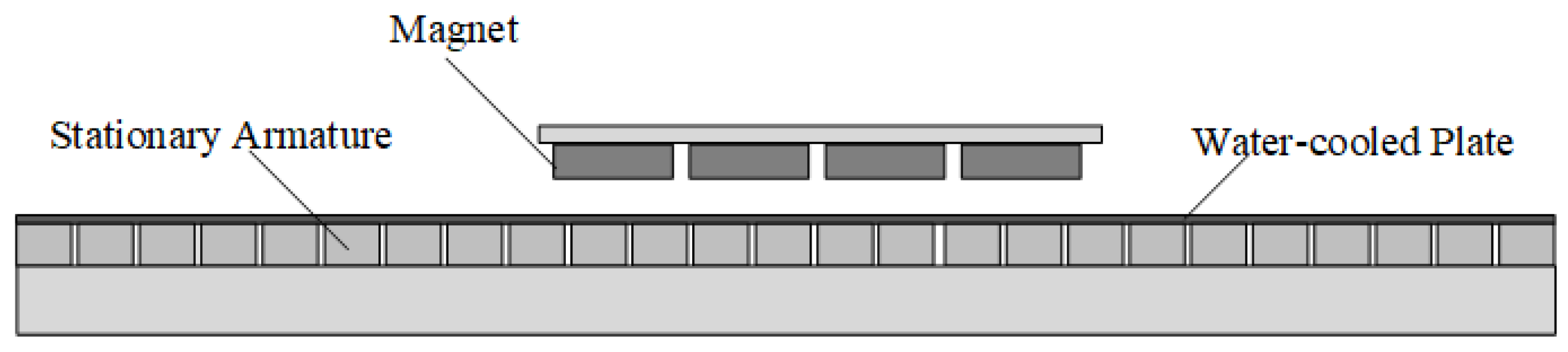
2. Single-Sided-Type Permanent Magnet Synchronous Linear Motor Structure
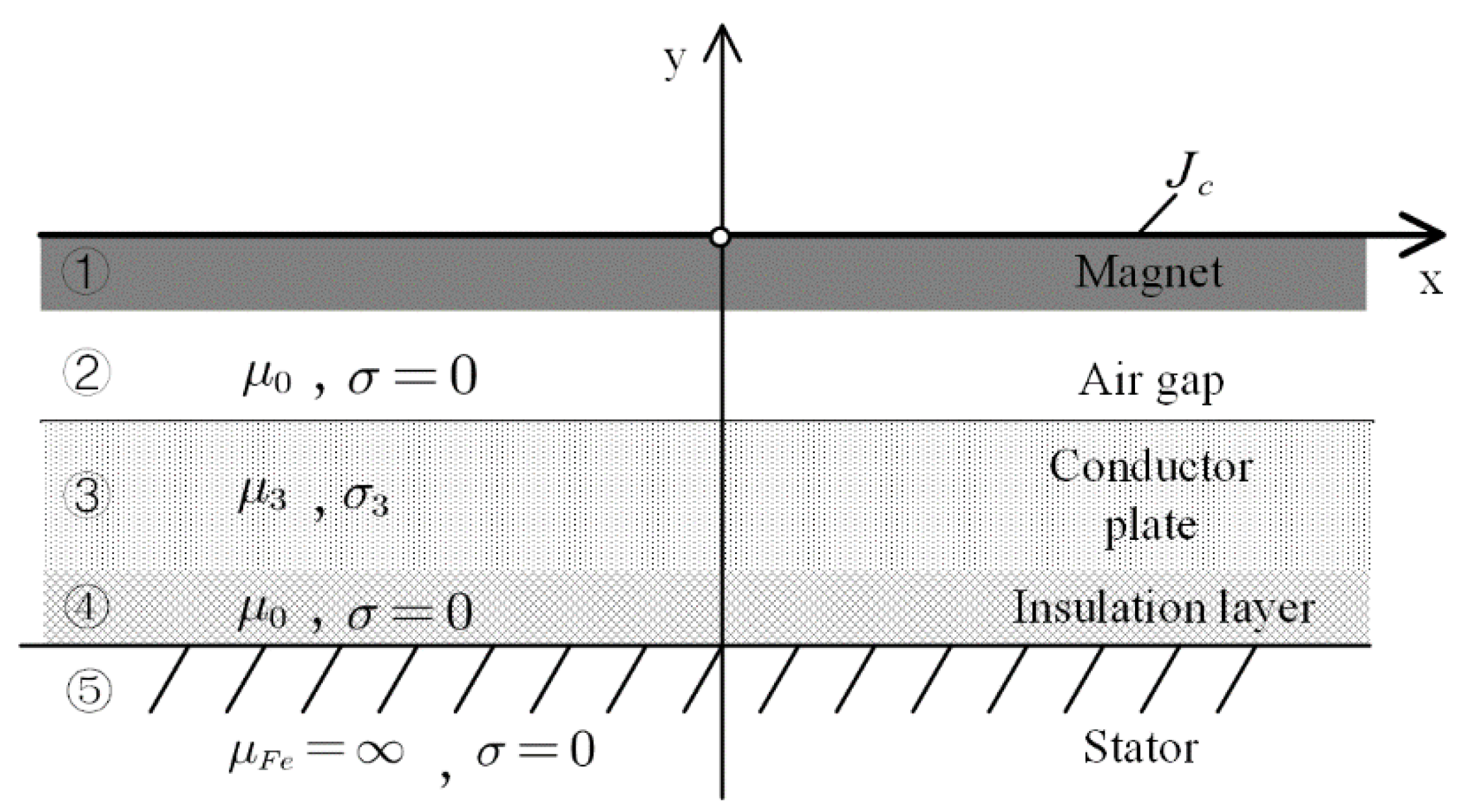
3. Cooling Plate Eddy Current Damping Force Calculation
- (1)
- Region 1: permanent magnets, which are the source of the magnetic density that generates the air gap magnetic field;
- (2)
- Region 2: air gap;
- (3)
- Region 3: the water-cooled plate, which causes eddy currents in this area, is the main area analyzed in this section;
- (4)
- Region 4: insulation paint layer;
- (5)
- Region 5: primary winding and core.
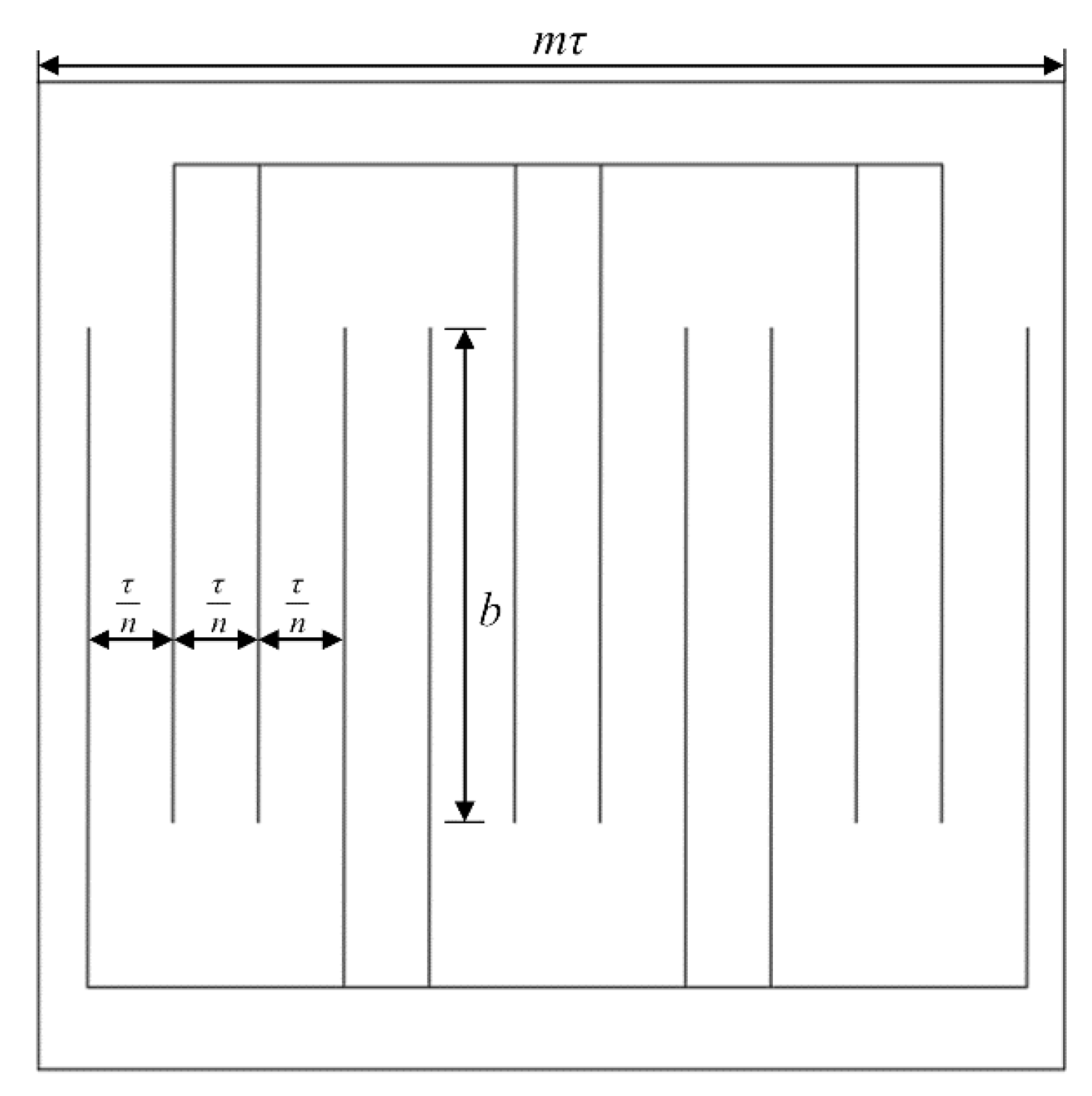
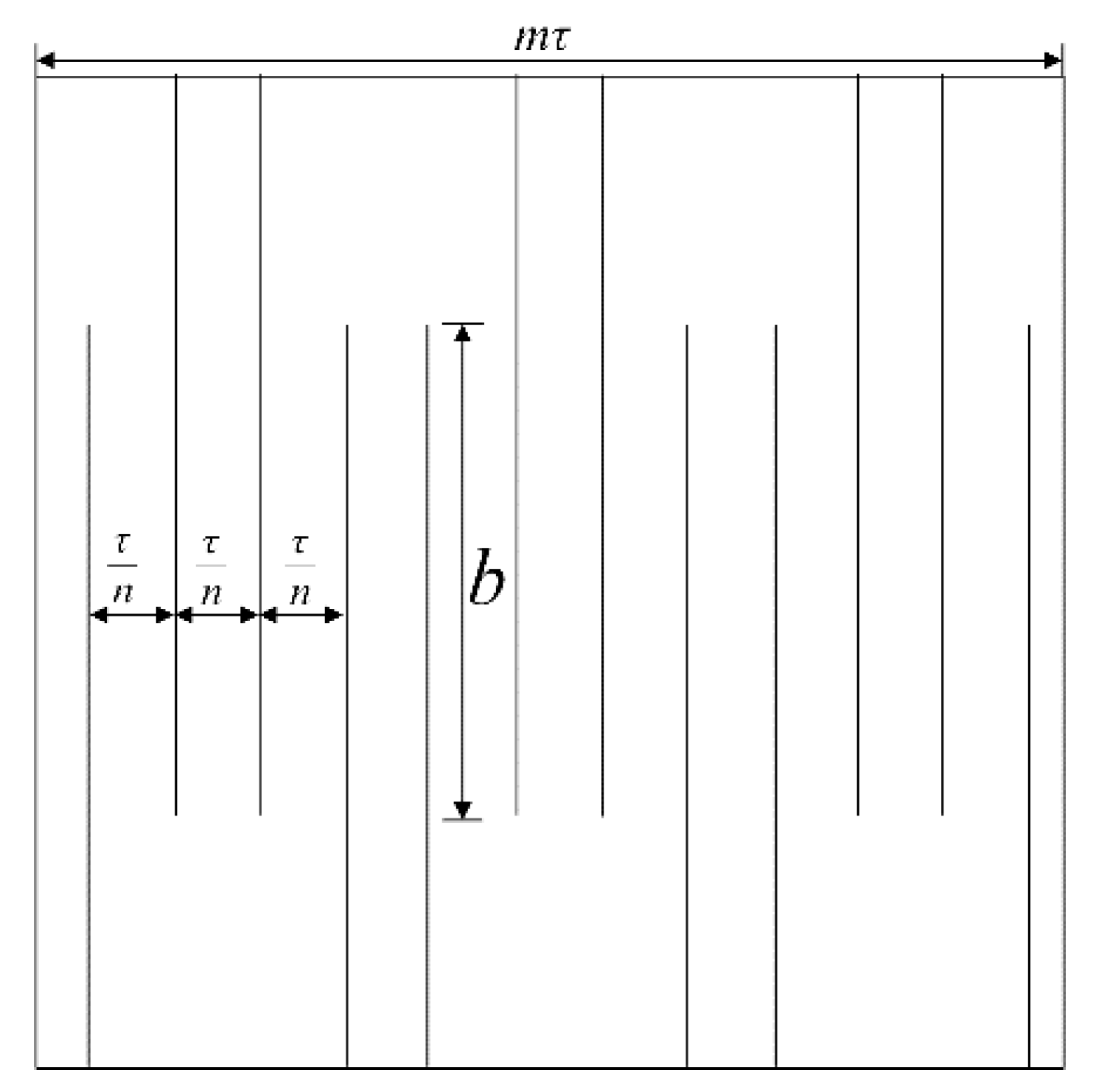
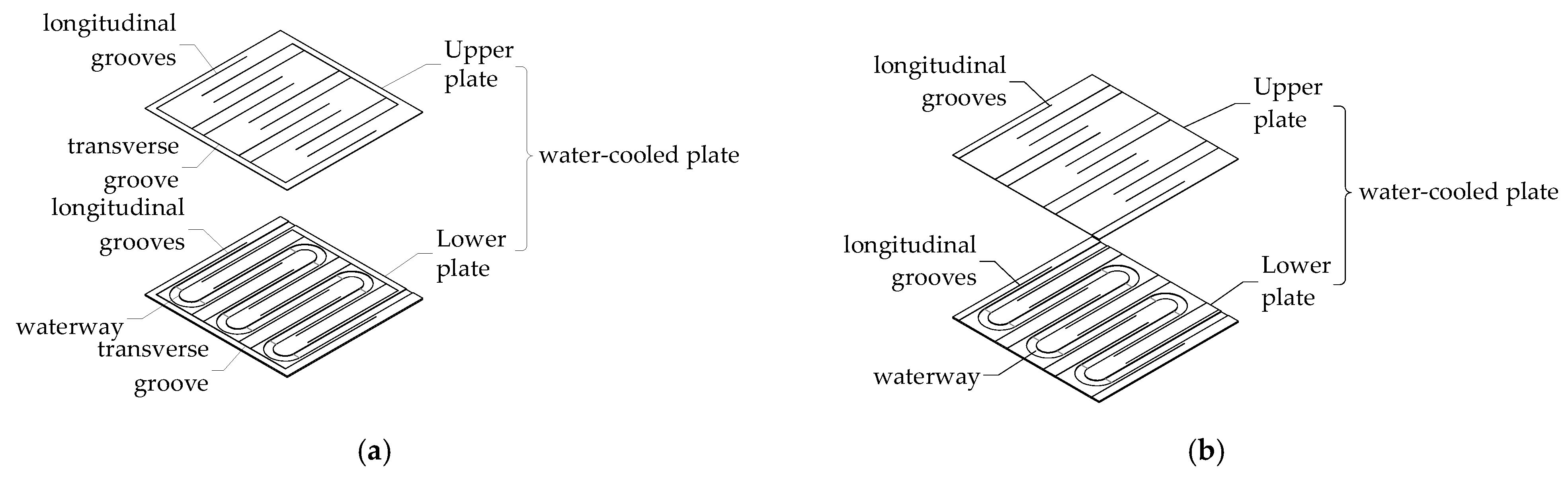
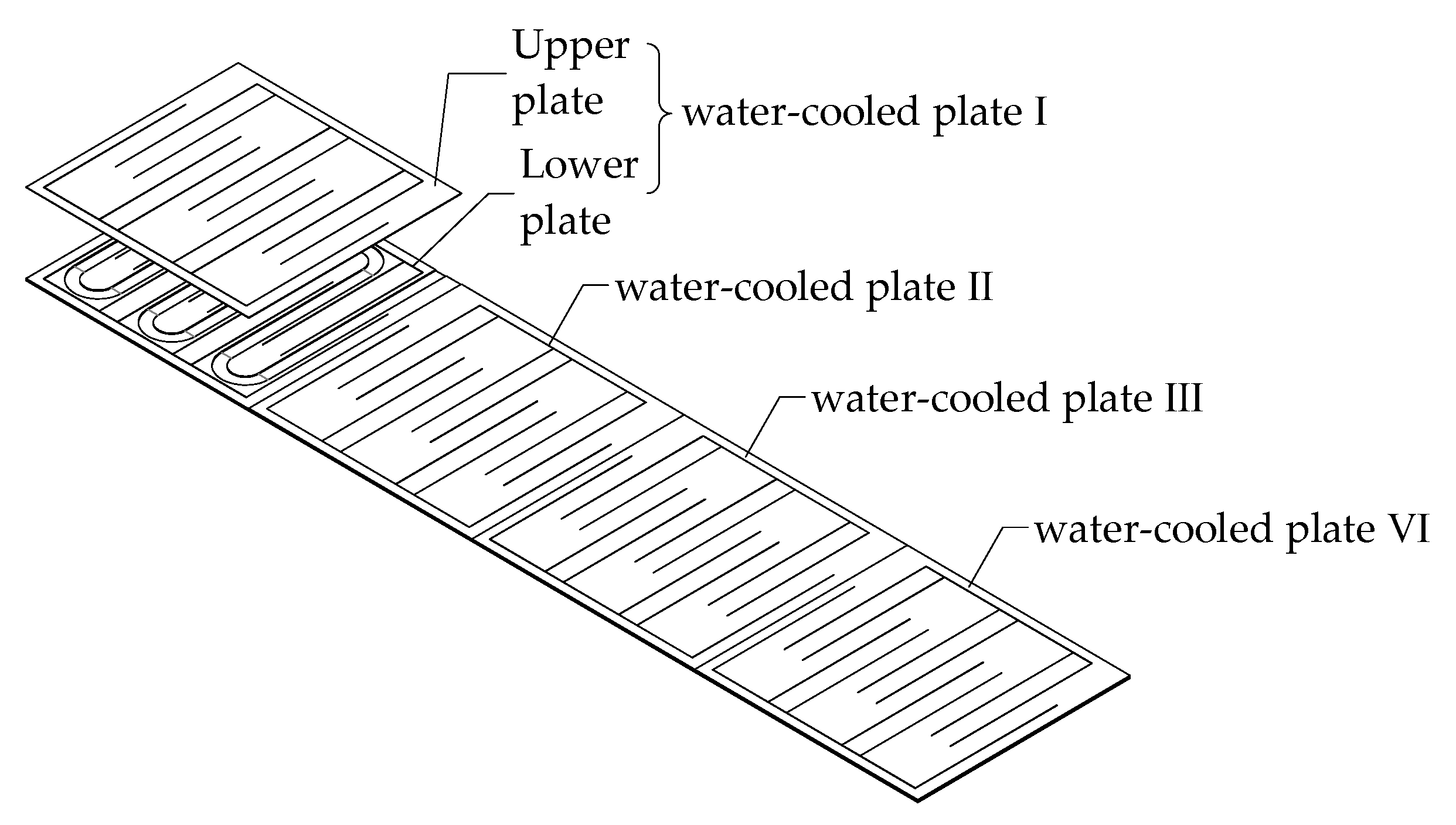
4. New Cooling Plate Design Method
5. Simulation and Experimental Verification
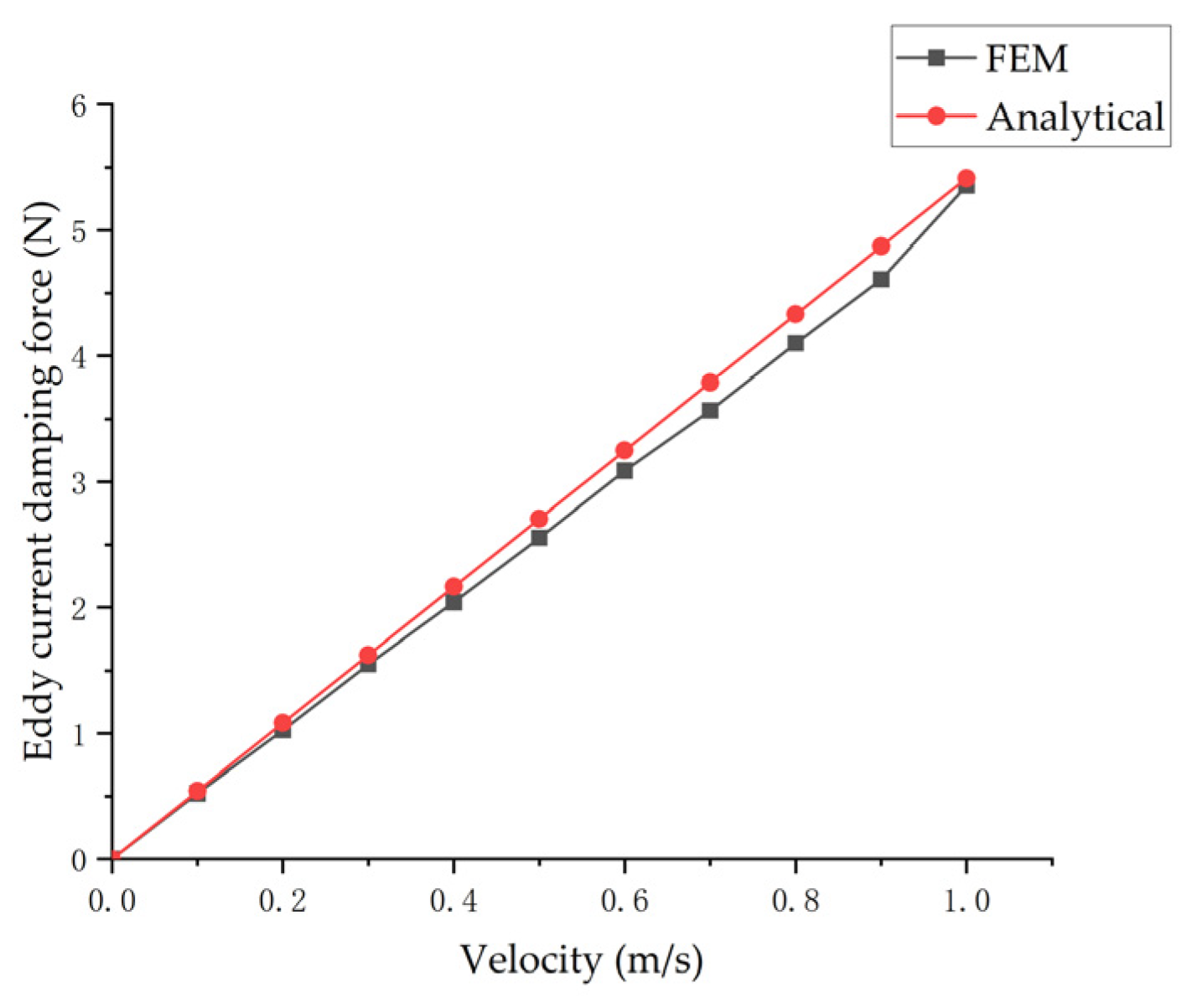
5.1. Simulation Verification
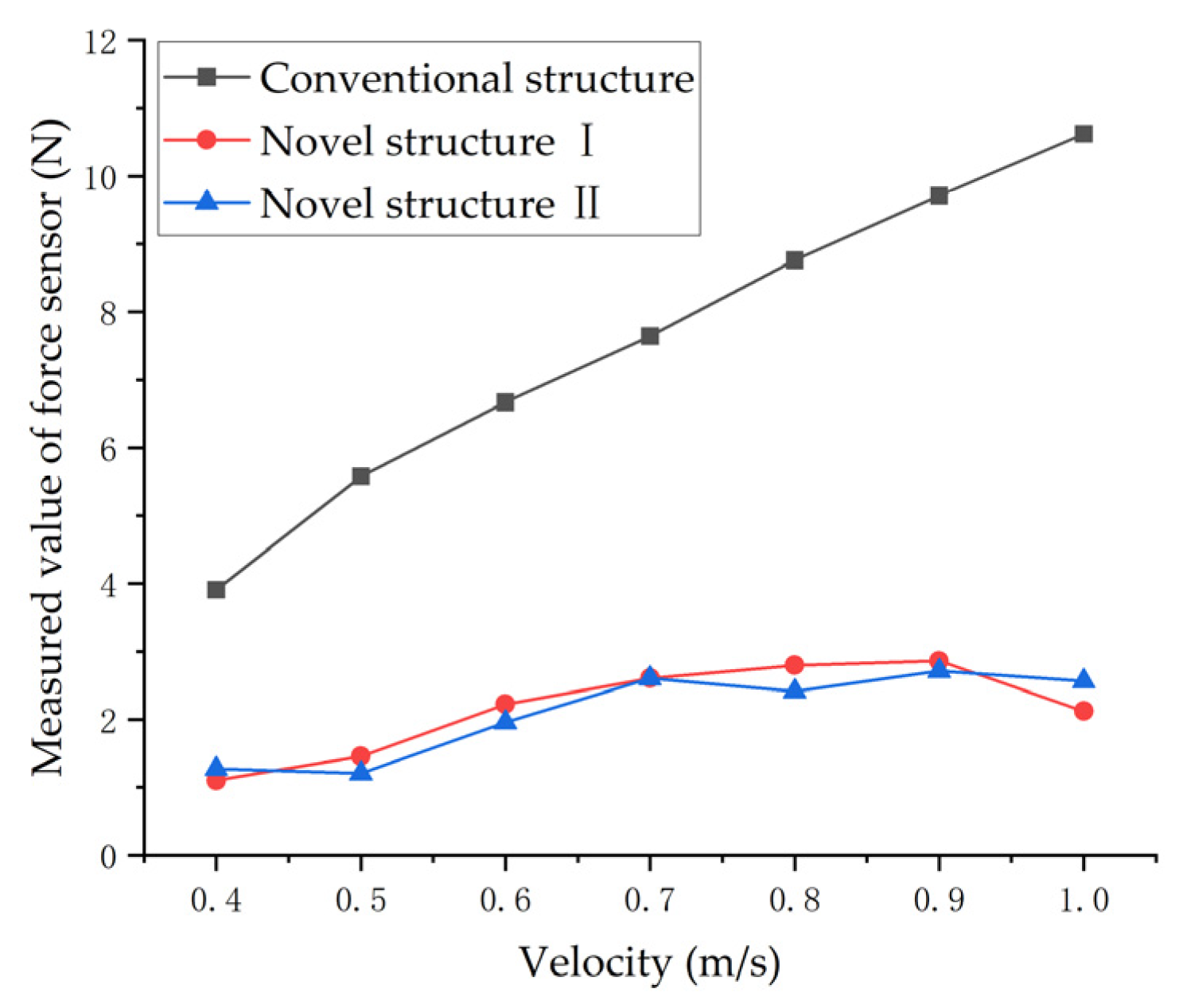
5.2. Experimental Prototype and Experimental Verification
6. Conclusions
- (1)
- Both the simulation and experimental results verified the accuracy of the analytical expression of the damping force, and the damping force of a cooling plate is proportional to both speed and thickness;
- (2)
- The new water-cooled cooling plate structure can significantly reduce the damping force. The thicker the water-cooled plate, the more obvious the effect. Compared to an unoptimized 3 mm water-cooled plate, the proposed method can suppress the damping force by more than 80%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bertola, L.; Cox, T.; Wheeler, P.; Garvey, S.; Morvan, H. Thermal Design of Linear Induction and Synchronous Motors for Electromagnetic Launch of Civil Aircraft. IEEE Trans. Plasma Sci. 2017, 45, 1146–1153. [Google Scholar] [CrossRef]
- Quan, K.B.; Zhen, H.X.; Hong-Xing, W.; Li-Yi, L. Thrust and Thermal Characteristics of Electromagnetic Launcher Based on Permanent Magnet Linear Synchronous Motors. IEEE Trans. Magn. 2009, 45, 358–362. [Google Scholar] [CrossRef]
- Galea, M.; Buticchi, G. Development of a High Force Density, Actuation Drive for an Aerospace Application. In Proceedings of the 2018 IEEE 27th International Symposium on Industrial Electronics (ISIE), Cairns, QLD, Australia, 13–15 June 2018; pp. 372–377. [Google Scholar] [CrossRef] [Green Version]
- Galea, M.; Gerada, C.; Raminosoa, T.; Wheeler, P. Design of a high force density tubular permanent magnet motor. In Proceedings of the XIX International Conference on Electrical Machines—ICEM 2010, Rome, Italy, 6–8 September 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Amoros, J.G.; Andrada, P.; Blanque, B.; Marin-Genescà, M. Influence of Design Parameters in the Optimization of Linear Switched Reluctance Motor under Thermal Constraints. IEEE Trans. Ind. Electron. 2017, 65, 1875–1883. [Google Scholar] [CrossRef] [Green Version]
- Park, K.-S.; Choi, J.; Park, Y.-P.; Park, N.-C. Thermal Deformation of Thermally Assisted Magnetic Recording Head in Binary Gas Mixture at Various Temperatures. IEEE Trans. Magn. 2013, 49, 2671–2676. [Google Scholar] [CrossRef]
- Ruoho, S.; Kolehmainen, J.; Ikaheimo, J.; Arkkio, A. Interdependence of Demagnetization, Loading, and Temperature Rise in a Permanent-Magnet Synchronous Motor. IEEE Trans. Magn. 2009, 46, 949–953. [Google Scholar] [CrossRef]
- Jang, C.; Kim, J.Y.; Kim, Y.J.; Kim, J.O. Heat transfer analysis and simplified thermal resistance modeling of linear motor driven stages for SMT applications. IEEE Trans. Components Packag. Technol. 2003, 26, 532–540. [Google Scholar] [CrossRef]
- Pei, Z.; Zhao, J.; Song, J.; Zong, K.; He, Z.; Zhou, Y. Temperature Field Calculation and Water-Cooling Structure Design of Coreless Permanent Magnet Synchronous Linear Motor. IEEE Trans. Ind. Electron. 2021, 68, 1065–1076. [Google Scholar] [CrossRef]
- Kandlikar, S.G.; Hayner, C.N. Liquid Cooled Cold Plates for Industrial High-Power Electronic Devices—Thermal Design and Manufacturing Considerations. Heat Transf. Eng. 2009, 30, 918–930. [Google Scholar] [CrossRef]
- Gholizad, H.; Funieru, B.; Binder, A. Direct Modeling of Motional Eddy Currents in Highly Saturated Solid Conductors by the Magnetic Equivalent Circuit Method. IEEE Trans. Magn. 2009, 45, 1016–1019. [Google Scholar] [CrossRef]
- Zheng, J.; Zhao, W.; Ji, J.; Zhu, J.; Lee, C.H.T. Sleeve design of permanent-magnet machine for low rotor losses. Chin. J. Electr. Eng. 2020, 6, 86–96. [Google Scholar] [CrossRef]
- Kou, B.; Jin, Y.; Zhang, H.; Zhang, L.; Zhang, H. Analysis and Design of Hybrid Excitation Linear Eddy Current Brake. IEEE Trans. Energy Convers. 2014, 29, 496–506. [Google Scholar] [CrossRef]
- Jin, Y.; Kou, B.; Li, L.; Li, C.; Pan, D.; Song, K. Analytical Model for a Permanent Magnet Eddy-Current Brake With Transverse Edge Effect. IEEE Access 2019, 7, 61170–61179. [Google Scholar] [CrossRef]
- Ebrahimi, B.; Khamesee, M.B.; Golnaraghi, F. A novel eddy current damper: Theory and experiment. J. Phys. D Appl. Phys. 2009, 42. [Google Scholar] [CrossRef]
- Ebrahimi, B.; Khamesee, M.B.; Golnaraghi, F. Permanent magnet configuration in design of an eddy current damper. Microsyst. Technol. 2008, 16, 19–24. [Google Scholar] [CrossRef]
- Johan, S.A. Lithographic Actuator Mechanism, Lithographic Apparatus, and Device Manufacturing Method. U.S. Patent 797618, 4 November 2004. [Google Scholar]
- Pan, D.; Li, L.; Wang, M. Modeling and Optimization of Air-Core Monopole Linear Motor Based on Multiphysical Fields. IEEE Trans. Ind. Electron. 2018, 65, 9814–9824. [Google Scholar] [CrossRef]
- Belli, Z. Optimization of stator slots shape for eddy current losses reduction in permanent magnets synchronous machine. In Proceedings of the 2014 Ninth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 25–27 March 2014; pp. 1–7. [Google Scholar] [CrossRef]
- Smajic, J.; Cranganu-Cretu, B.; Kostinger, A.; Jaindl, M.; Renhart, W.; Magele, C. Optimization of Shielding Devices for Eddy-Currents Using Multiobjective Optimization Methods. IEEE Trans. Magn. 2009, 45, 1550–1553. [Google Scholar] [CrossRef]
- Kou, B.; Jin, Y.; Zhang, H.; Zhang, L.; Zhang, H. Nonlinear Analytical Modeling of Hybrid-Excitation Double-Sided Linear Eddy-Current Brake. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Singh, A. Theory of eddy-current brakes with thick rotating disc. Proc. Inst. Electr. Eng. 1977, 124, 373–376. [Google Scholar] [CrossRef]
- Morris, W.J.; Tyldesley, S.; Rodda, S.; Halperin, R.; Pai, H.; McKenzie, M.; Duncan, G.; Morton, G.; Hamm, J.; Murray, N. Androgen Suppression Combined with Elective Nodal and Dose Escalated Radiation Therapy (the ASCENDE-RT Trial): An Analysis of Survival Endpoints for a Randomized Trial Comparing a Low-Dose-Rate Brachytherapy Boost to a DoseEscalated External Beam Boost for High- and Intermediate-risk Prostate Cancer. Int. J. Radiat. Oncol. Biol. Phys. 2017, 98, 275–285. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, C.; Li, L.; Guo, Q. Parameter analysis of power system for solar-powered unmanned aerial vehicle. Appl. Energy 2021, 295, 117031. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value |
|---|---|---|
| Length of permanent magnet | 26 mm | |
| Height of permanent magnet | 11.5 mm | |
| Turns of exciting winding | 196 | |
| Length of primary iron core | 1 m | |
| Width of primary iron core | 80 mm | |
| Tooth width | 41.7 mm | |
| Height of primary core yoke | 5 mm | |
| Air gap length | 0.5 mm | |
| Pole pitch | 31.25 mm | |
| Water-cooled plate thickness | 1 mm | |
| Conductivity | 1.4 × 106 S/m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Sun, Q.; Kang, K.; Li, L. Analysis and Suppression of the Eddy Current Damping Force of the Cooling Plate of a Permanent Magnet Linear Motor. Symmetry 2021, 13, 2025. https://doi.org/10.3390/sym13112025
Wang M, Sun Q, Kang K, Li L. Analysis and Suppression of the Eddy Current Damping Force of the Cooling Plate of a Permanent Magnet Linear Motor. Symmetry. 2021; 13(11):2025. https://doi.org/10.3390/sym13112025
Chicago/Turabian StyleWang, Mingyi, Qinwei Sun, Kai Kang, and Liyi Li. 2021. "Analysis and Suppression of the Eddy Current Damping Force of the Cooling Plate of a Permanent Magnet Linear Motor" Symmetry 13, no. 11: 2025. https://doi.org/10.3390/sym13112025
APA StyleWang, M., Sun, Q., Kang, K., & Li, L. (2021). Analysis and Suppression of the Eddy Current Damping Force of the Cooling Plate of a Permanent Magnet Linear Motor. Symmetry, 13(11), 2025. https://doi.org/10.3390/sym13112025