Omnidirectional Mobile Robot Dynamic Model Identification by NARX Neural Network and Stability Analysis Using the APLF Method

Abstract
1. Introduction
2. Omnidirectional Mobile Robot Model
2.1. Robot Kinematic Model
2.2. Robot Dynamic Model
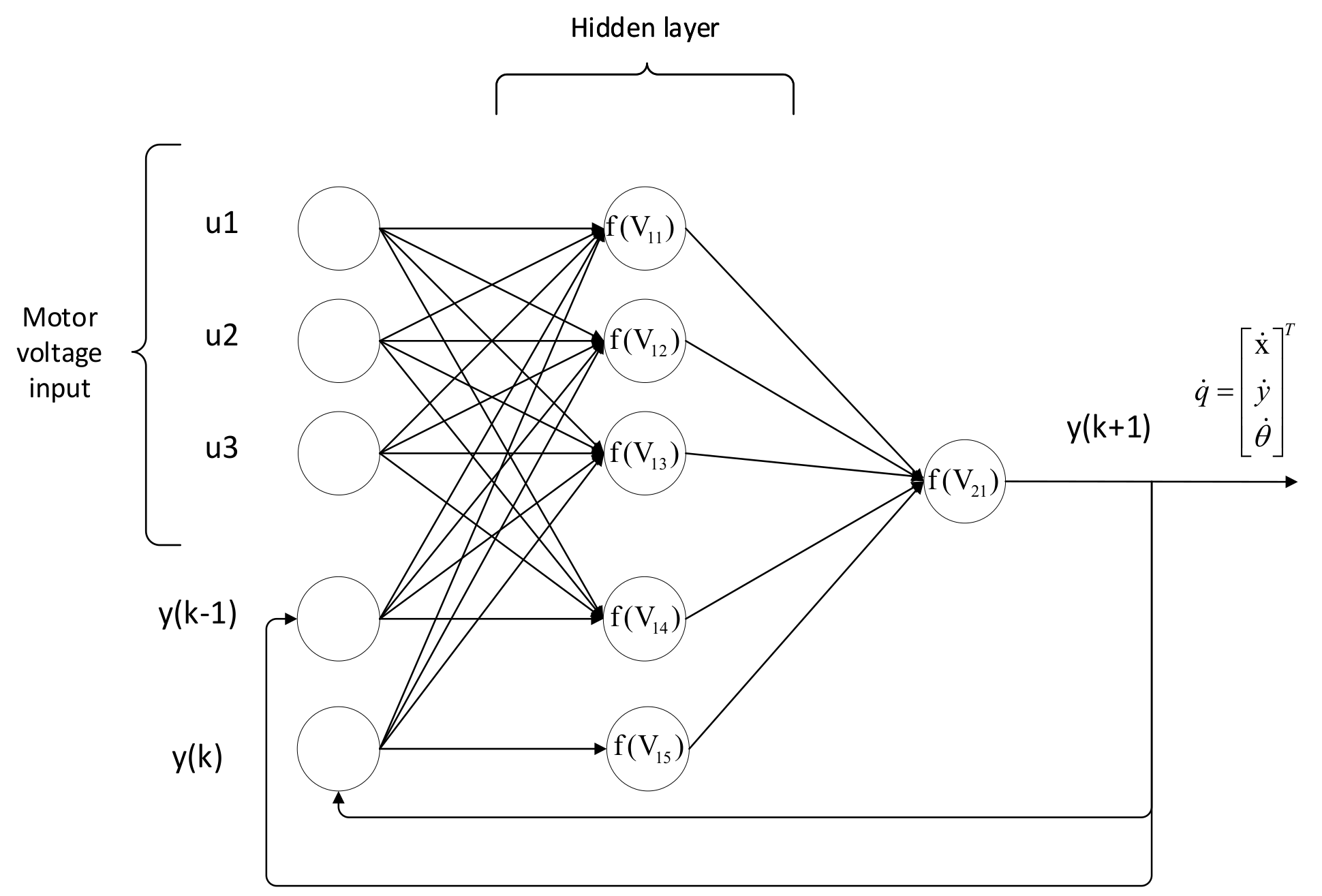
3. Using NARX Neural Network to Identify Dynamic Model
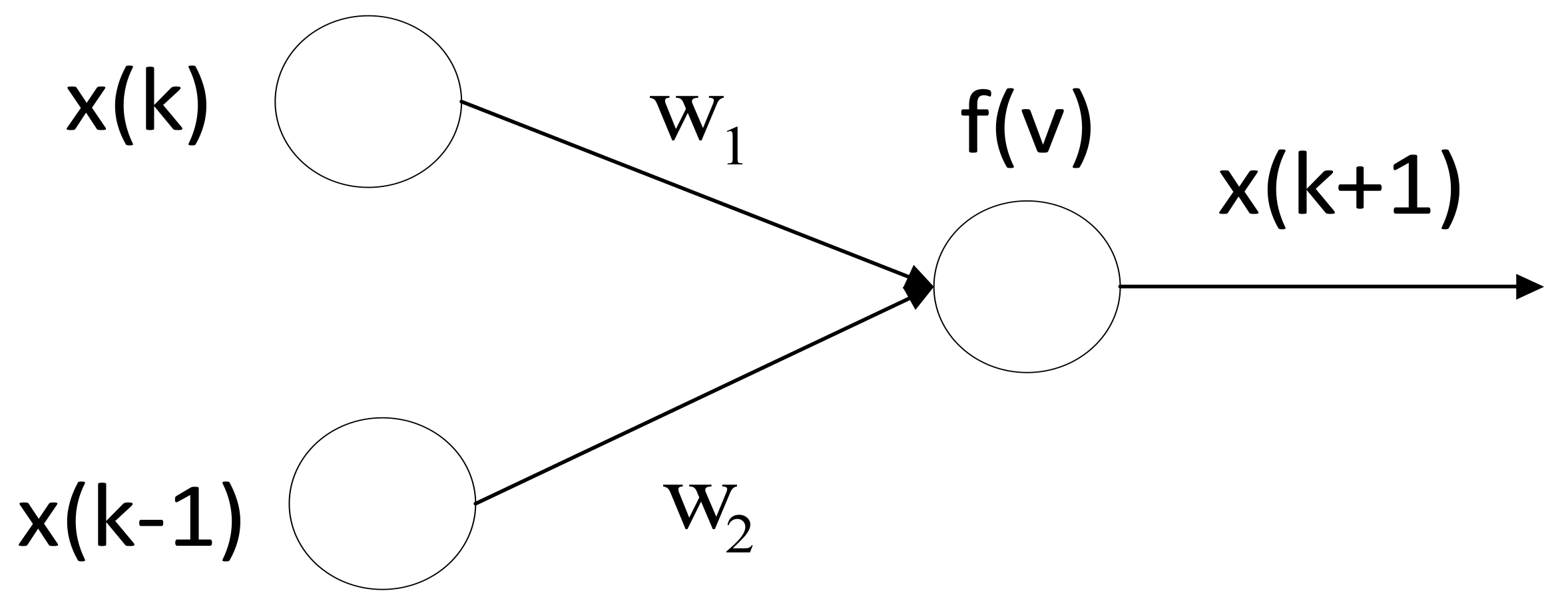
3.1. Introduction to NARX Neural Network
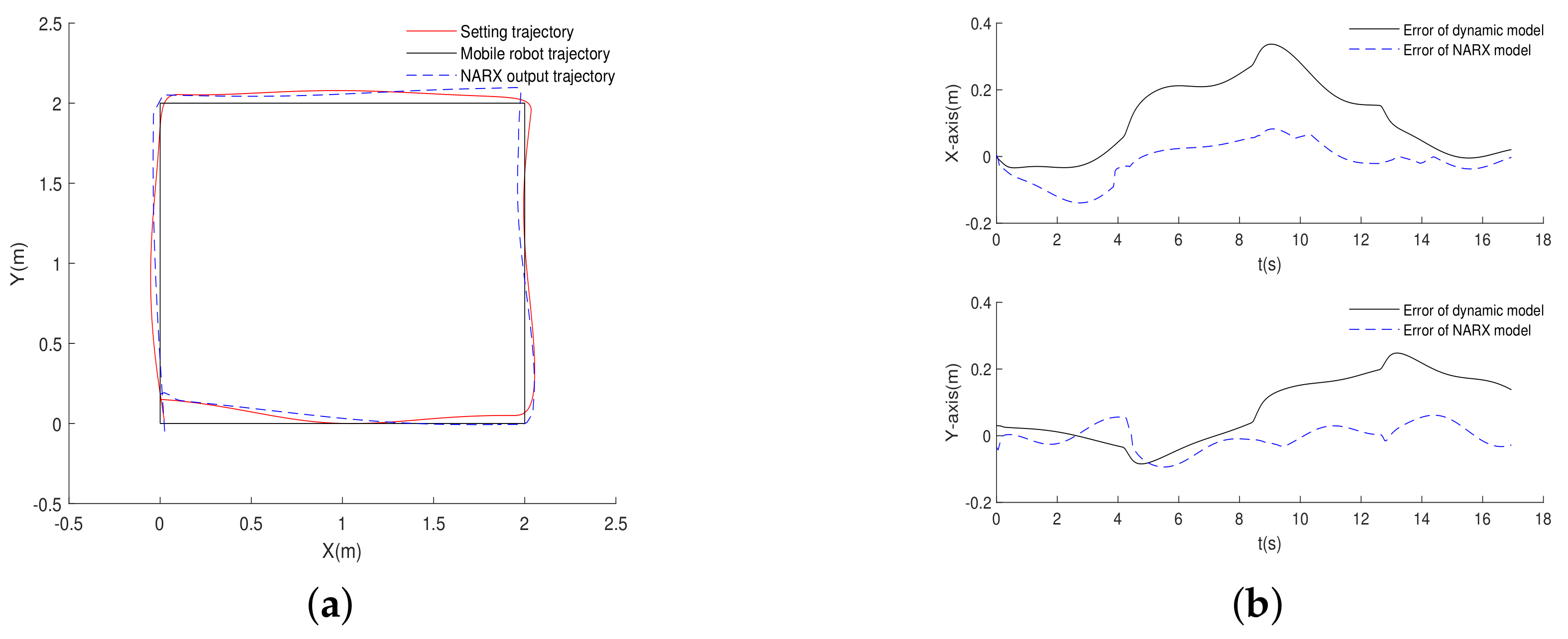
3.2. NARX Neural Network Training Data Selection And Experiment
4. NARX Neural Network Stability Conditions
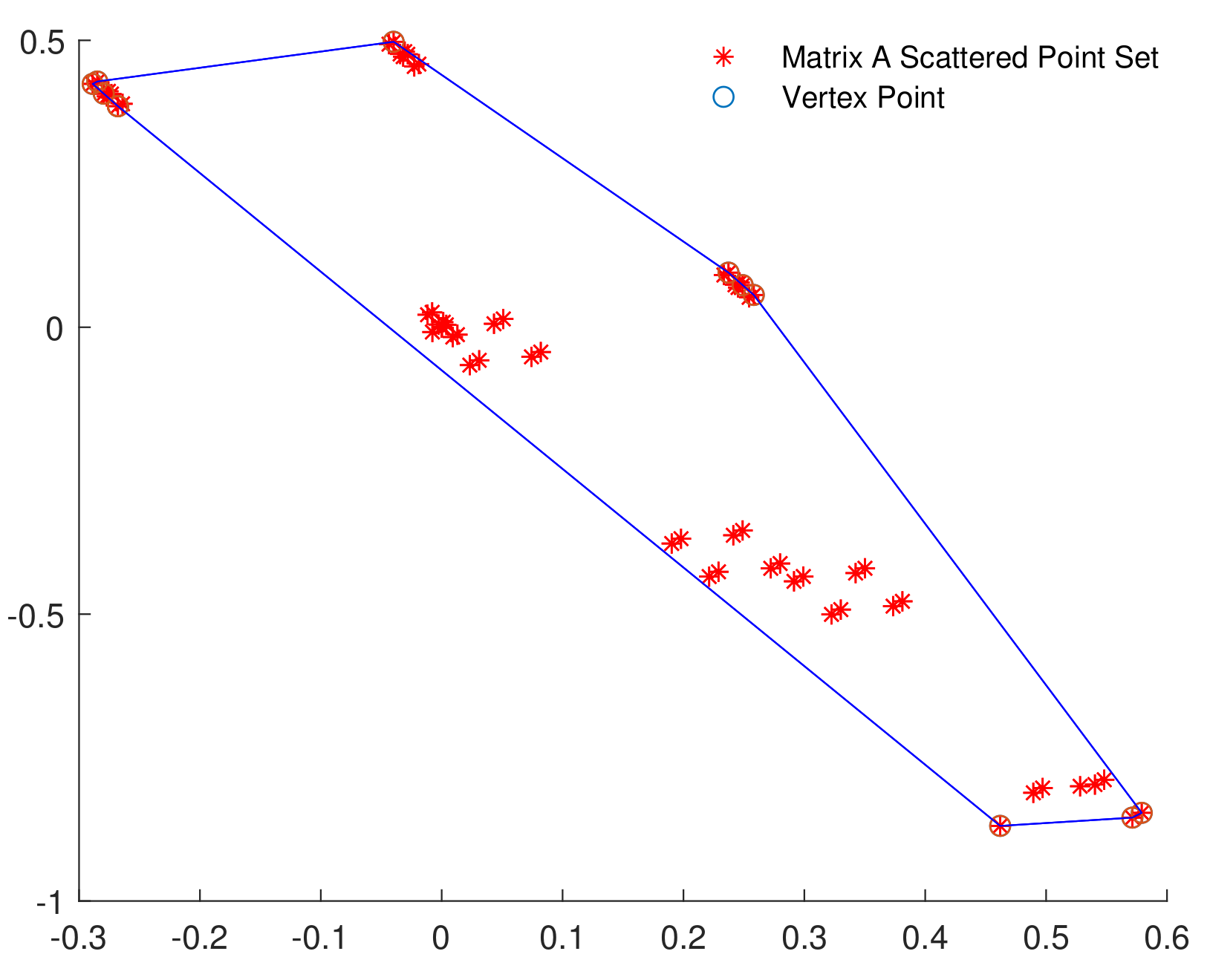
4.1. Use LDI Method to Represent NARX Neural Network
4.2. Minimum Representation
4.3. NARX Neural Network Stability Analysis
5. Optimized APLF Method
| Algorithm 1 optimized APLF |
|
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Asama, H.; Sato, M.; Kaetsu, H.; Ozaki, K.; Matsumoto, A.; Endo, I. Development of an Omni-Directional Mobile Robot with 3 DoF Decoupling Drive Mechanism. J. Robot. Soc. Jpn. 1996, 14, 249–254. [Google Scholar] [CrossRef]
- Salih, J.E.M.; Rizon, M.; Yaacob, S.; Adom, A.H.; Mamat, M.R. Designing Omni-Directional Mobile Robot with Mecanum Wheel. Am. J. Appl. Sci. 2006, 3, 1831–1835. [Google Scholar]
- Mamun, M.A.A.; Nasir, M.T.; Khayyat, A. Embedded System for Motion Control of an Omnidirectional Mobile Robot. IEEE Access 2018, 6, 6722–6739. [Google Scholar] [CrossRef]
- Rohrig, C.; Hess, D.; Kirsch, C.; Kunemund, F. Localization of an omnidirectional transport robot using IEEE 802.15.4a ranging and laser range finder. In Proceedings of the the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 3798–3803. [Google Scholar]
- Li, Y.; Dai, S.; Zhao, L.; Yan, X.; Shi, Y. Topological Design Methods for Mecanum Wheel Configurations of an Omnidirectional Mobile Robot. Symmetry 2019, 11, 1268. [Google Scholar] [CrossRef]
- Gu, D.; Hu, H. Receding horizon tracking control of wheeled mobile robots. IEEE Trans. Control Syst. Technol. 2006, 14, 743–749. [Google Scholar]
- Tang, J.; Watanabe, K.; Shiraishi, Y. Design and traveling experiment of an omnidirectional holonomic mobile robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Osaka, Japan, 4–8 November 1996; Volume 1, pp. 66–73. [Google Scholar]
- He, W.; Chen, Y.; Yin, Z. Adaptive neural network control of an uncertain robot with full-state constraints. IEEE Trans. Cybern. 2015, 46, 620–629. [Google Scholar] [CrossRef]
- Pin, F.G.; Killough, S.M. A new family of omnidirectional and holonomic wheeled platforms for mobile robots. IEEE Trans Robot. Autom. 1994, 10, 480–489. [Google Scholar] [CrossRef]
- Sira-Ramirez, H.; Lopez-Uribe, C.; Velasco-Villa, M. Linear Observer-Based Active Disturbance Rejection Control of the Omnidirectional Mobile Robot. Asian J. Control 2012, 15, 51–63. [Google Scholar]
- Ren, C.; Li, X.; Yang, X.; Ma, S. Extended State Observer based Sliding Mode Control of an Omnidirectional Mobile Robot with Friction Compensation. IEEE Trans. Ind. Electron. 2019, 66, 9480–9489. [Google Scholar] [CrossRef]
- Mekonnen, G.; Kumar, S.; Pathak, P.M. A new dynamic control model with stability analysis for omnidirectional mobile robot. In Proceedings of the 2015 Conference on Advances in Robotics, Goa, India, 2–4 July 2015; pp. 1–6. [Google Scholar]
- Piroddi, L.; Spinelli, W. An identification algorithm for polynomial NARX models based on simulation error minimization. Int. J. Control 2003, 76, 1767–1781. [Google Scholar] [CrossRef]
- Anh, H.P.H.; Ahn, K.K.; Il, Y.J. Dynamic model identification of 2-axes PAM robot arm using neural MIMO NARX model. In Proceedings of the the 2008 Second International Conference on Communications and Electronics, Hoi An City, Vietnam, 4–6 June 2008. [Google Scholar]
- Tijani, I.B.; Akmeliawati, R.; Legowo, A.; Budiyono, A. Nonlinear identification of a small scale unmanned helicopter using optimized NARX network with multiobjective differential evolution. Eng. Appl. Artif. Intell. 2014, 33, 99–115. [Google Scholar] [CrossRef]
- Tanaka, K. An approach to stability criteria of neural-network control systems. IEEE Trans. Neural Netw. 1996, 7, 629–642. [Google Scholar] [CrossRef] [PubMed]
- Ge, S.S.; Hang, C.C.; Zhang, T. Adaptive neural network control of nonlinear systems by state and output feedback. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 1999, 29, 818–828. [Google Scholar] [CrossRef] [PubMed]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed]
- Dorato, P.; Tempo, R.; Muscato, G. Bibliography on robust control. Automatica 1993, 29, 201–213. [Google Scholar] [CrossRef]
- Daafouz, J.; Bernussou, J. Parameter dependent Lyapunov functions for discrete time systems with time varying parametric uncertainties. Syst. Control Lett. 2001, 43, 355–359. [Google Scholar] [CrossRef]
- Chesi, G.; Garulli, A.; Tesi, A.; Vicino, A. Polynomially parameter-dependent Lyapunov functions for robust stability of polytopic systems: An LMI approach. IEEE Trans. Autom. Control 2005, 50, 365–370. [Google Scholar] [CrossRef]
- Geromel, J.C.; Colaneri, P. Robust stability of time varying polytopic systems. Syst. Control Lett. 2006, 55, 81–85. [Google Scholar] [CrossRef]
- He, Y.; Liu, G.; Rees, D. New delay-dependent stability criteria for neural networks with time-varying delay. IEEE Trans. Neural Netw. 2007, 18, 310–314. [Google Scholar] [CrossRef]
- Guerra, T.M.; Kruszewski, A.; Lauber, J. Discrete Tagaki-Sugeno models for control: Where are we? Annu. Rev. Control 2009, 33, 37–47. [Google Scholar] [CrossRef]
- Xiang, W.; Lopez, D.M.; Musau, P.; Johnson, T.T. Reachable set estimation and verification for neural network models of nonlinear dynamic systems. In Safe, Autonomous and Intelligent Vehicles; Springer: Berlin/Heidelberg, Germany, 2019; pp. 123–144. [Google Scholar]
- Kruszewski, A.; Wang, R.; Guerra, T.M. Nonquadratic Stabilization Conditions for a Class of Uncertain Nonlinear Discrete Time TS Fuzzy Models: A New Approach. IEEE Trans. Autom. Control 2008, 53, 606–611. [Google Scholar] [CrossRef]
- Tognetti, E.S.; Oliveira, R.C.L.F.; Peres, P.L.D. ℌ∞ and ℌ2 nonquadratic stabilisation of discrete-time Takagi-Sugeno systems based on multi-instant fuzzy Lyapunov functions. Int. J. Syst. Sci. 2015, 46, 76–87. [Google Scholar] [CrossRef]
- Xiang, W. Parameter-memorized Lyapunov functions for discrete-time systems with time-varying parametric uncertainties. Automatica 2018, 87, 450–454. [Google Scholar] [CrossRef]
- Sala, A. Stability analysis of LPV systems: Scenario approach. Automatica 2019, 104, 233–237. [Google Scholar] [CrossRef]
- Fu, H.; Xin, L.; Wang, B.; Wang, Y. Trajectory Tracking Use Linear Active Disturbance Control of the Omnidirectional Mobile Robot. In Proceedings of the the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Parameter Description | Value |
|---|---|---|
| m | Robot mass | 10 kg |
| Motor armature resistance | 1.2 | |
| L | Wheel to robot centroid distance | 0.17 m |
| r | Wheel radius | 0.05 m |
| Wheel inertia | 1.5 × 10 kg·m | |
| Robot inertia | 0.125 kg·m | |
| Motor back EMF | 460 r·min/V | |
| Motor torque | 0.025 N·m/A | |
| n | Gear reduction ratio | 27 |
| Method | APLF | Optimized APLF | |||||
|---|---|---|---|---|---|---|---|
| K | 1 | 2 | 3 | 1 | 2 | 3 | 4 |
| Computation time(s) | 3.2 | 57.5 | 663 | 4.7 | 29.7 | 72.7 | 153.8 |
| Number of LMI | 30 | 650 | 15751 | 30 | 380 | 812 | 1406 |
| Number of P ∖ Lenth of | 5 | 25 | 125 | 5 | 19 | 28 | 37 |
| - | - | - | 0.8516 | 0.8459 | 0.8418 | 0.8418 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xin, L.; Wang, Y.; Fu, H. Omnidirectional Mobile Robot Dynamic Model Identification by NARX Neural Network and Stability Analysis Using the APLF Method. Symmetry 2020, 12, 1430. https://doi.org/10.3390/sym12091430
Xin L, Wang Y, Fu H. Omnidirectional Mobile Robot Dynamic Model Identification by NARX Neural Network and Stability Analysis Using the APLF Method. Symmetry. 2020; 12(9):1430. https://doi.org/10.3390/sym12091430
Chicago/Turabian StyleXin, Liang, Yuchao Wang, and Huixuan Fu. 2020. "Omnidirectional Mobile Robot Dynamic Model Identification by NARX Neural Network and Stability Analysis Using the APLF Method" Symmetry 12, no. 9: 1430. https://doi.org/10.3390/sym12091430
APA StyleXin, L., Wang, Y., & Fu, H. (2020). Omnidirectional Mobile Robot Dynamic Model Identification by NARX Neural Network and Stability Analysis Using the APLF Method. Symmetry, 12(9), 1430. https://doi.org/10.3390/sym12091430