On the Integration of Stiff ODEs Using Block Backward Differentiation Formulas of Order Six


Abstract
1. Introduction
- It contains widely varying time scales, i.e., some components of the solution decay much more rapidly than others [3];
- The step size is dictated by the stability requirements rather than the accuracy requirements [3];
- Explicit methods do not work, or work only extremely slowly [4];
- All of its eigenvalues have negative real parts, and the stiffness ratio (the ratio of the magnitudes of the real parts of the largest and smallest eigenvalues) is large [3];
- No solution component is unstable (no eigenvalue of the Jacobian matrix has a real part which is at all large and positive) and at least some components are very stable (at least one eigenvalue has a real part which is large and negative) [5].
- (i)
- and
- (ii)
- where are the eigenvalues of A and the ratio is called the stiffness ratio as a measure of stiffness.
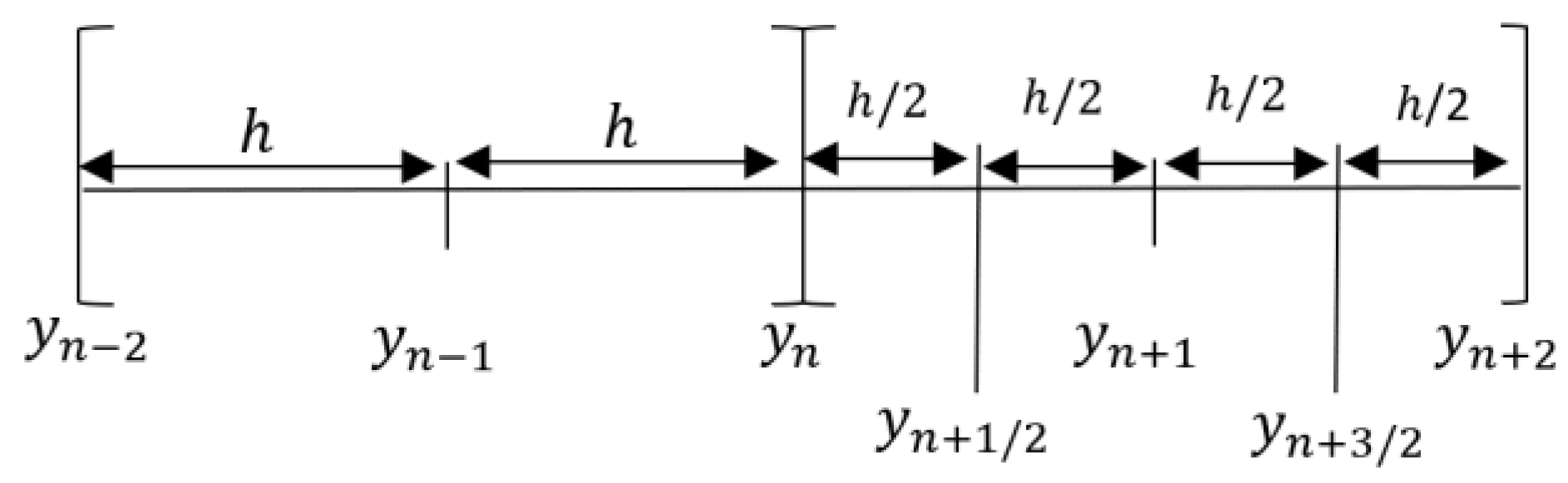
2. Derivation of BBDF with Off-Step Points, BBDFO
3. Order, Convergence and Stability of the Method
3.1. Order of the Method
3.2. Zero Stability of the Method
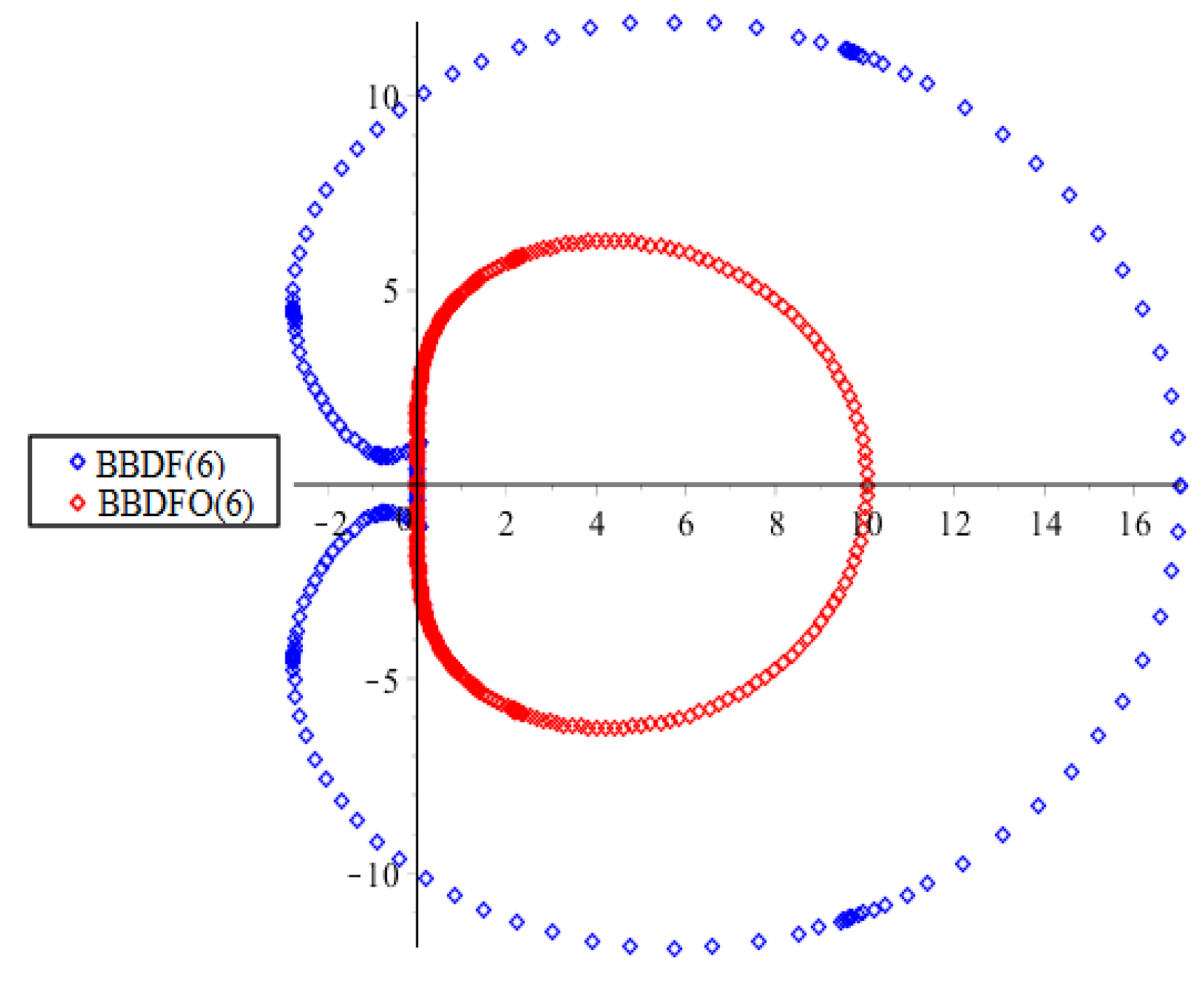
3.3. Stability Region of the Method
3.4. Stability Comparison
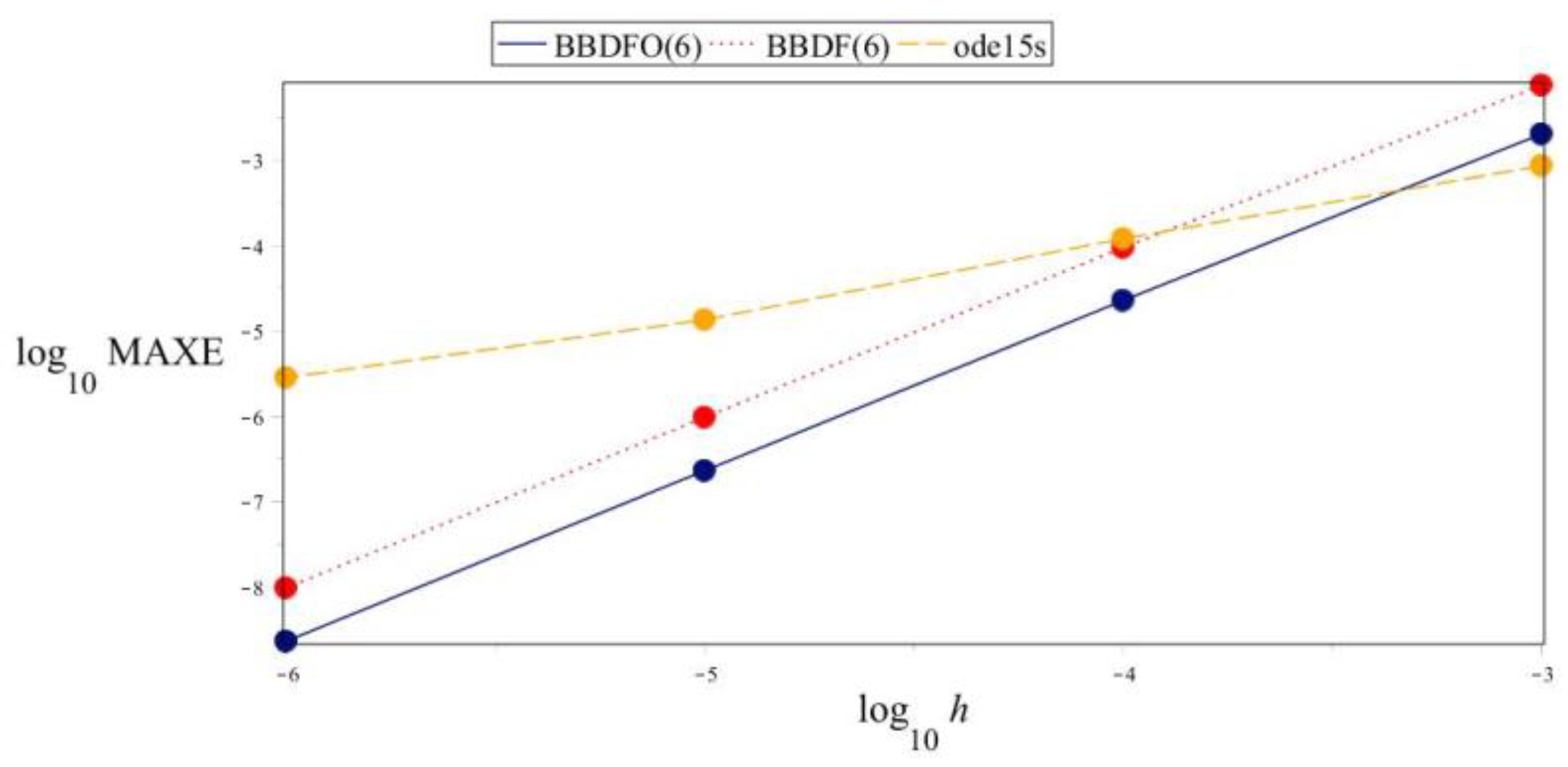
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BBDFO(6) | New Block Backward Differentiation Formula with off-step points of order 6 |
| BBDF(6) | 2-point Block Backward Differentiation Formula of order 6 in [28] |
| ode15s | Variable order Backward Differentiation Formula [7]. |
| NS | Number of steps |
| Step size | |
| MAXE | Maximum error |
References
- Henrici, P. Discrete Variable Methods in Ordinary Differential Equations; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1969. [Google Scholar]
- Curtiss, C.F.; Hirschfelder, J.O. Integration of stiff equations. Proc. Natl. Acad. Sci. USA 1952, 38, 235–243. [Google Scholar] [CrossRef] [PubMed]
- Lambert, J.D. Numerical Methods for Ordinary Differential Systems: The Initial Value Problem; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1991. [Google Scholar]
- Wanner, G.; Hairer, E. Solving Ordinary Differential Equations II; Springer: Berlin/Heidelberg, Germany, 1996; p. 2. [Google Scholar]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Lambert, J.D. Computational Methods in Ordinary Differential Equations; John Wiley & Sons: Hoboken, NJ, USA, 1973; pp. 22–23, 231–233. [Google Scholar]
- Gear, C.W. Numerical Initial Value Problems in Ordinary Differential Equations; Prentice-Hall: Englewood Cliffs, NJ, USA, 1971; ISBN 013-626606-1. [Google Scholar]
- Rosser, J.B. A Runge-Kutta for all seasons. Siam Rev. 1967, 9, 417–452. [Google Scholar] [CrossRef]
- Shampine, L.F.; Watts, H.A. Block implicit one-step methods. Math. Comput. 1969, 23, 731–740. [Google Scholar] [CrossRef]
- Majid, Z.A.; Suleiman, M.B.; Omar, Z. 3-point implicit block method for solving ordinary differential equations. Bull. Malays. Math. Sci. Soc. Second Ser. 2006, 29, 23–31. [Google Scholar]
- Ibrahim, Z.B.; Othman, K.I.; Suleiman, M. Implicit r-point block backward differentiation formula for solving first-order stiff ODEs. Appl. Math. Comput. 2007, 186, 558–565. [Google Scholar] [CrossRef]
- Ibrahim, Z.B.; Othman, K.I.; Suleiman, M. 2-point block predictor-corrector of backward differentiation formulas for solving second order ordinary differential equations directly. Chiang Mai J. Sci. 2012, 39, 502–510. [Google Scholar]
- Musa, H.; Suleiman, M.B.; Senu, N. Fully implicit 3-point block extended backward differentiation formula for stiff initial value problems. Appl. Math. Sci. 2012, 6, 4211–4228. [Google Scholar]
- Nasir, N.A.A.M.; Ibrahim, Z.B.; Othman, K.I.; Suleiman, M. Numerical solution of first order stiff ordinary differential equations using fifth order block backward differentiation formulas. Sains Malays. 2012, 41, 489–492. [Google Scholar]
- Musa, H.; Suleiman, M.B.; Ismail, F.; Senu, N.; Ibrahim, Z.B. An improved 2–point block backward differentiation formula for solving stiff initial value problems. Aip. Conf. Proc. Am. Inst. Phys. 2013, 1522, 211–220. [Google Scholar]
- Jator, S.N.; Agyingi, E. Block Hybrid-Step Backward Differentiation Formulas for Large Stiff Systems. Int. J. Comput. Math. 2014, 2014, 1–8. [Google Scholar] [CrossRef]
- Jana Aksah, S.; Ibrahim, Z.B.; Zawawi, M.; Shah, I. Stability analysis of singly diagonally implicit block backward differentiation formulas for stiff ordinary differential equations. Mathematics 2019, 7, 211. [Google Scholar] [CrossRef]
- Ola Fatunla, S. Block methods for second order ODEs. Int. J. Comput. Math. 1991, 41, 55–63. [Google Scholar] [CrossRef]
- Ibrahim, Z.B. Block Multistep Methods for Solving Ordinary Differential Equations. Ph.D. Thesis, Universiti Putra Malaysia, Putrajaya, Malaysia, 2006. [Google Scholar]
- Musa, H.; Suleiman, M.B.; Ismail, F.; Senu, N.; Ibrahim, Z.B. An accurate block solver for stiff IVPs. ISRN Appl. Math. 2013, 7, 61–67. [Google Scholar]
- Abasi, N.; Suleiman, M.; Abasi, N.; Musa, H. 2-point block BDF method with off-step points for solving stiff ODEs. J. Soft Comput. Appl. 2014, 1–15. [Google Scholar] [CrossRef]
- Yap, L.K.; Ismail, F. Block Methods with Off-Steps Points for Solving First Order Ordinary Differential Equations. In International Conference on Mathematical Sciences and Statistics 2013; Springer: Singapore, 2013; pp. 275–284. [Google Scholar]
- Babangida, B.; Musa, H. Diagonally Implicit Super Class of Block Backward Differentiation Formula with Off-Step Points for Solving Stiff Initial Value Problems. J. Appl. Comput. Math. 2016, 5, 1–7. [Google Scholar]
- Ra’ft Abdelrahim, Z.O.; Kuboye, J.O. New Hybrid Block Method with Three Off-Step Points for Solving First Order Ordinary Differential Equations. Am. J. Appl. Sci. 2016, 13, 209–212. [Google Scholar] [CrossRef]
- Ajileye, G.; Amoo, S.A.; Ogwumu, O.D. Hybrid Block Method Algorithms for Solution of First Order Initial Value Problems in Ordinary Differential Equations. J. Appl. Comput. Math. 2019, 7, 2. [Google Scholar]
- Agarwal, P.; Ibrahim, I.H. A new type OF hybrid multistep multiderivative formula for solving stiff IVPs. Adv. Differ. Equ. 2019, 2019, 1–14. [Google Scholar] [CrossRef]
- Dahlquist, G.G. A special stability problem for linear multistep methods. BIT Numer. Math. 1963, 3, 27–43. [Google Scholar] [CrossRef]
- Nasir, N.A.A.M. Parallel Multiblock Backward Differentiation Formulae for Solving First Order Ordinary Differential Equations. Master’s Thesis, Universiti Putra Malaysia, Putrajaya, Malaysia, 2012. [Google Scholar]
- Othman, K.I.; Ibrahim, Z.B.; Suleiman, M.; Majid, Z. Automatic intervalwise block partitioning using Adams type method and backward differentiation formula for solving ODEs. Appl. Math. Comput. 2007, 188, 1642–1646. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Interval of Instability |
|---|---|
| BBDFO(6) | (0, 10.05) |
| BBDF(6) | (0, 17.10) |
| Methods | NS | MAXE | |
|---|---|---|---|
| BBDFO(6) | 2.11157(2) | ||
| BBDF(6) | 9.11882(4) | ||
| ode15s | 2.08844(3) | ||
| BBDFO(6) | 5.54678(3) | ||
| BBDF(6) | 1.69293(2) | ||
| ode15s | 2.60950(4) | ||
| BBDFO(6) | 7.38966(5) | ||
| BBDF(6) | 3.02723(4) | ||
| ode15s | 3.76862(5) | ||
| BBDFO(6) | 7.60256(7) | ||
| BBDF(6) | 3.20426(6) | ||
| ode15s | 6.32160(6) |
| Methods | NS | MAXE | |
|---|---|---|---|
| BBDFO(6) | 5.68483(7) | ||
| BBDF(6) | 2.38845(6) | ||
| ode15s | 9.37878(4) | ||
| BBDFO(6) | 5.71640(9) | ||
| BBDF(6) | 2.41537(8) | ||
| ode15s | 1.14126(4) | ||
| BBDFO(6) | 5.71960(11) | ||
| BBDF(6) | 2.41808(10) | ||
| ode15s | 1.75037(5) | ||
| BBDFO(6) | 9.52614(11) | ||
| BBDF(6) | 7.40070(11) | ||
| ode15s | 2.61573(6) |
| Methods | NS | MAXE | |
|---|---|---|---|
| BBDFO(6) | 2.04408(3) | ||
| BBDF(6) | 7.62867(3) | ||
| ode15s | 8.69860(4) | ||
| BBDFO(6) | 2.28504(5) | ||
| BBDF(6) | 9.54280(5) | ||
| ode15s | 1.21447(4) | ||
| BBDFO(6) | 2.31054(7) | ||
| BBDF(6) | 9.75695(7) | ||
| ode15s | 1.36101(5) | ||
| BBDFO(6) | 2.31311(9) | ||
| BBDF(6) | 9.77861(9) | ||
| ode15s | 2.85643(6) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nasarudin, A.A.; Ibrahim, Z.B.; Rosali, H. On the Integration of Stiff ODEs Using Block Backward Differentiation Formulas of Order Six. Symmetry 2020, 12, 952. https://doi.org/10.3390/sym12060952
Nasarudin AA, Ibrahim ZB, Rosali H. On the Integration of Stiff ODEs Using Block Backward Differentiation Formulas of Order Six. Symmetry. 2020; 12(6):952. https://doi.org/10.3390/sym12060952
Chicago/Turabian StyleNasarudin, Amiratul Ashikin, Zarina Bibi Ibrahim, and Haliza Rosali. 2020. "On the Integration of Stiff ODEs Using Block Backward Differentiation Formulas of Order Six" Symmetry 12, no. 6: 952. https://doi.org/10.3390/sym12060952
APA StyleNasarudin, A. A., Ibrahim, Z. B., & Rosali, H. (2020). On the Integration of Stiff ODEs Using Block Backward Differentiation Formulas of Order Six. Symmetry, 12(6), 952. https://doi.org/10.3390/sym12060952