1. Introduction
Fixed point theory remains a very important and popular tool in pure, as well as applied mathematics, especially in the existence and uniqueness theories. It contains classical results to establish the existence and uniqueness theorems in ordinary differential equations, partial differential equations, integral equations, random differential equations, matrix equations, functional equations, iterated function systems, variational inequalities, etc. The Banach contraction principle [
1] is one of the pivotal results of fixed point theory, which asserts that every contraction mapping defined on a complete metric space
to itself always admits a unique fixed point. This principle is a very effective and popular tool for guaranteeing the existence and uniqueness of the solution of certain problems arising within and beyond mathematics. This principle has been generalized and extended in several directions. For this kind of work, one may recall Boyd and Wong [
2], Matkowski [
3], Ciric [
4], Ran and Reurings [
5], Jleli and Samet [
6], and Imdad et al. [
7], among others. As the Banach contraction principle and its extensions are existence and uniqueness results, they are very effectively utilized in several kinds of applications in the entire domain of mathematical and physical sciences, which also includes economics. One of the well-known extensions of the Banach contraction principle is due to Jleli and Samet [
6], which is known as
-contractions (or
-contractions). In order to define
-contractions, Jleli and Samet [
6], in 2014, introduced a new class of auxiliary functions as given below.
Definition 1. Let be a function satisfying the following conditions:
θ is nondecreasing,
for any iff ,
there exists and satisfying ,
θ is continuous.
Jleli and Samet [
6] proved the following result:
Theorem 1. [6] Let be a complete generalized metric space and . Assume that there exist θ satisfying , and such that:Then, f has a unique fixed point. The mapping f in Theorem 1 is called -contraction (or -contraction).
In 2015, Hussain et al. [
8] extended Theorem 1 for some new contraction mappings in which the authors used the condition
instead of
. Imdad et al. [
7] relaxed the condition
and called such mappings weak
-contractions.
On the other hand, there is yet another way to improve the Banach contraction principle utilizing various types of binary relations. In 2004, Ran and Reurings [
5] proved a fixed point result in metric space equipped with a partial order relation, which was further generalized by Nieto and Rodríguez-López in [
9,
10]. In the same quest, in 2015, Alam and Imdad [
11] generalized the Banach contraction to a complete relational metric space.
The study of this paper goes in four directions, which can be described as follows:
to introduce the notion of -weak contraction;
to prove our results in the setting of relational metric spaces;
to adopt some examples substantiating the utility of our proven results;
to utilize our newly proven results and establish an existence and uniqueness result for the solution of a Volterra-type integral equation.
3. Main Results
Firstly, we introduce the following two classes of auxiliary functions, which are relatively larger than the class of the auxiliary functions covered under Definition 1.
Definition 6. Let Θ be the collection of all that satisfy the following conditions:
for every sequence iff ,
θ is lower semicontinuous.
The following examples of the functions belong to the class of :
Example 1. ,
Example 2. ,
Example 3. ,
Example 4. .
Next, we introduce yet another class of auxiliary functions:
Definition 7. Let Ψ be the collection of all that satisfy the following conditions:
for every sequence iff ,
ψ is right upper semicontinuous.
The following mappings belong to the class :
Example 5. ,
Example 6. ,
Example 7. ,
Example 8. .
In what follows, we write .
Finally, we introduce the concept of -weak contractions as follows:
Definition 8. Let be a metric space, a binary relation on E, and . Then, f is called a -weak contraction if there exist and with () such that: with and . Now, we state and prove our first main result as follows:
Theorem 2. Let be a metric space endowed with a transitive binary relation and . Assume that:
- (i)
E is -complete,
- (ii)
there exists such that ,
- (iii)
is f-closed,
- (iv)
f is -weak contraction and
- (v)
f is -continuous.
Then, f has a fixed point.
Proof. In view of
, there is
such that
. Consider the sequence
of Picard iterates of
f based at
, i.e.,
If
, for some
, then
, i.e.,
is a fixed point of
f, and there is nothing to prove. Now, assume that
for all
. We claim that the sequence {
} is
-preserving. Due to Condition
and (
2), we have
and
; hence,
. Suppose
, for some
. As
is
f-closed, we have
, i.e.,
. Hence, by mathematical induction, we conclude that
is
-preserving and
, for all
.
In view of the contraction condition (2), we have:
where
:
as
and
whenever
and
.
If
=
, then,
a contradiction. Hence,
so that:
as
. Finally, we have:
Now, letting
, we obtain:
Making use of
, we get:
Now, we proceed to prove that
is Cauchy. Let on the contrary
not be Cauchy. From Lemma 1, one can infer that there exist an
and
with
such that:
tend to
when
.
As
is transitive, so
, for all
. Furthermore, for sufficiently large
, for all
(as
). Therefore, we have:
so that:
wherein
:
Observe that:
.
Now, as
, and
, so due to Lemma 1, we have:
On using (
3), (
4), and (
5), we get:
a contradiction. Thus,
is Cauchy. As
is
-preserving Cauchy in
E, which is
-complete, therefore, there is some
such that:
As
f is
-continuous, we obtain:
i.e.,
as
. Now, using the uniqueness of the limit, we have
. Hence,
f has a fixed point in
E. This ends the proof. □
Next, we adopt the following example, which exhibits the utility of Theorem 2.
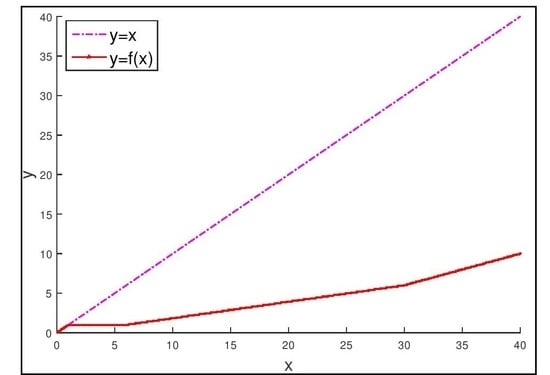
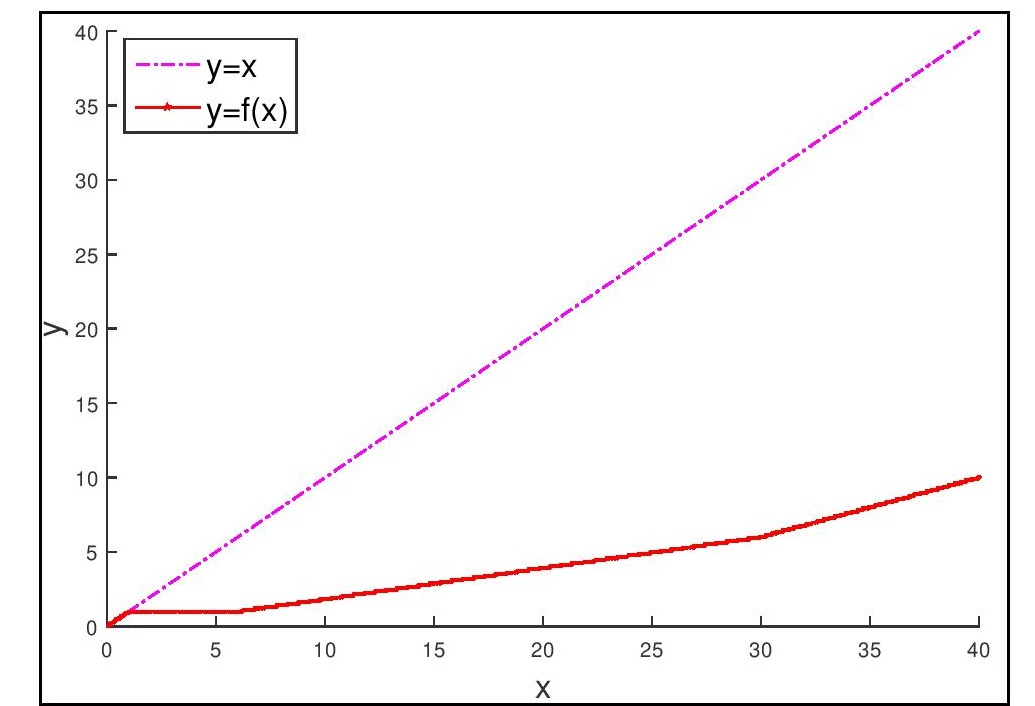
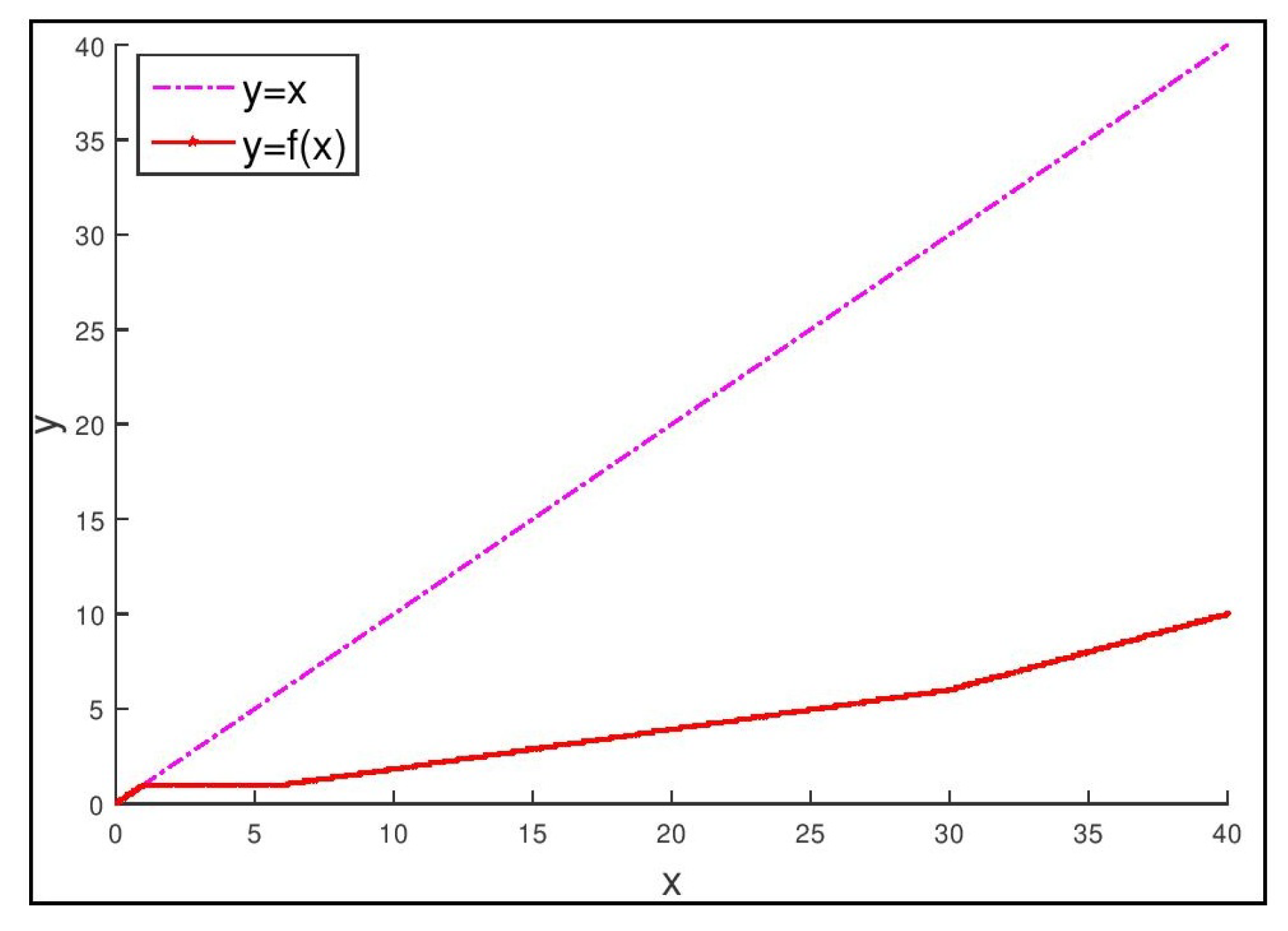
Example 9. Let and d be the usual metric defined by , . Define as: whose first few terms are 6, 30, 90, 210, and so on. Define a binary relation on E as: The mapping f is continuous (see Figure 1). To show that is f-closed, consider the following three different cases.
Case I: Let , then .
Case II: When , then or , i.e., .
Case III: When , then or and, hence, . Thus, is f-closed.
Now, to show that f is a -weak contraction mapping, we define as follows: where are given by: We have to show that there exists some such that: We do not need to consider the cases as . Now, we distinguish the following four cases.
Case I: If and then ,so that: Case II: If and , then so that: Case III: If and , then :so that: Case IV: If and , then :so that: Therefore, in all four cases, we have: Thus, the condition (6) is satisfied if we take . Therefore, we have furnished a such that , for all with , i.e., f is a -weak contraction mapping on X. Observe that the remaining assumptions of Theorem 2 are also fulfilled. Thus, f possesses a fixed point in E. Observe that f has infinitely many fixed points; in fact, (see Figure 1). The pre-existing results in this direction, say the results of Jleli and Samet [6], Hussain et al. [8], and Imdad et al. [7], cannot be applied in this example as these results require the contraction condition to hold on the whole space. However, in this example, the contraction condition holds for those , which are related under the binary relation . Now, we prove an analog of Theorem 2 using the d-self-closedness property.
Theorem 3. The conclusion of Theorem 2 holds true if Assumption (v) is replaced by:
is d-self-closed.
Proof. On the lines of the proof of Theorem 2, we can show that
is an
-preserving Cauchy sequence converging to
. Our aim is to show that
. Suppose on the contrary that
. In view of the condition (
), there exists a subsequence
with
, for all
. Now, as
and
, for sufficiently large
, we have
, for all
. Hence, we have (for all
):
where
:
As:
and the sequence
converges to
a with
, we have (for all
):
so that (for all
):
Hence, (
7) reduces to:
implying thereby:
As
is lower semicontinuous,
, which gives rise to the following:
This is a contradiction. Hence, the assumption is wrong. Therefore, we must have , i.e., a is a fixed point of f. This completes the proof. □
Next, we prove the following corresponding uniqueness result.
Theorem 4. If we assume in addition to the assumptions of Theorem 2 (or Theorem 3) that is complete or is -connected, then f has a unique fixed point in E.
Proof. In view of Theorem 2 (or 3), we have
is nonempty. Assume that
is complete, and let
be two different points in
. Therefore,
or
, i.e.,
or
. As
and
, we have
. Hence, using the contraction condition
, we get:
This is a contradiction as . Hence, our assumption that is wrong. Therefore, f has a unique fixed point in E.
Now, if is -connected and , then there exist in such that for all where . Now, as and for all from the earlier part of the theorem, we have , for all i. Therefore, , , the fixed point of f is unique. This concludes the proof. □
Now, to substantiate the utility of Theorems 3 and 4, we furnish the following example:
Example 10. Let and d be the usual metric on E. Define on E as: Then, is transitive. Now, define by: We observe that the following holds:
E is -complete, as for any -preserving Cauchy sequence in E, there exists such that , or , , i.e., converges to zero or one;
and ;
is f-closed;
Now, we show that f is a -weak contraction. Take as the following:where are given by: We have to show that there exists such that: Observe that implies that . Therefore, we consider only the two cases and .
Case I: Let . Then: Case II: If , then: Therefore, for , we have:or:for all with and . Hence, the Condition is satisfied. Next, in order to verify , observe that for any -preserving sequence converging to some , there is some such that either , for all or , for all . Hence, is a subsequence of such that for each .
Therefore, all the assumptions of Theorem 3 are satisfied. Hence, f has a fixed point in E. We can see that zero is the fixed point of f. Furthermore, , which is complete as . Thus, Theorem 4 ensures the uniqueness of the fixed point of f.


 ,
, 
{kind=link}
{kind=link}
