Cornering Algorithm for a Crawler In-Pipe Inspection Robot




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Classification of the In-Pipe Robot
1.2. Problems with the In-Pipe Robot in Control
The Robot of this Paper
1.3. Main Work of This Paper
2. Kinematic Analysis of Our Robot
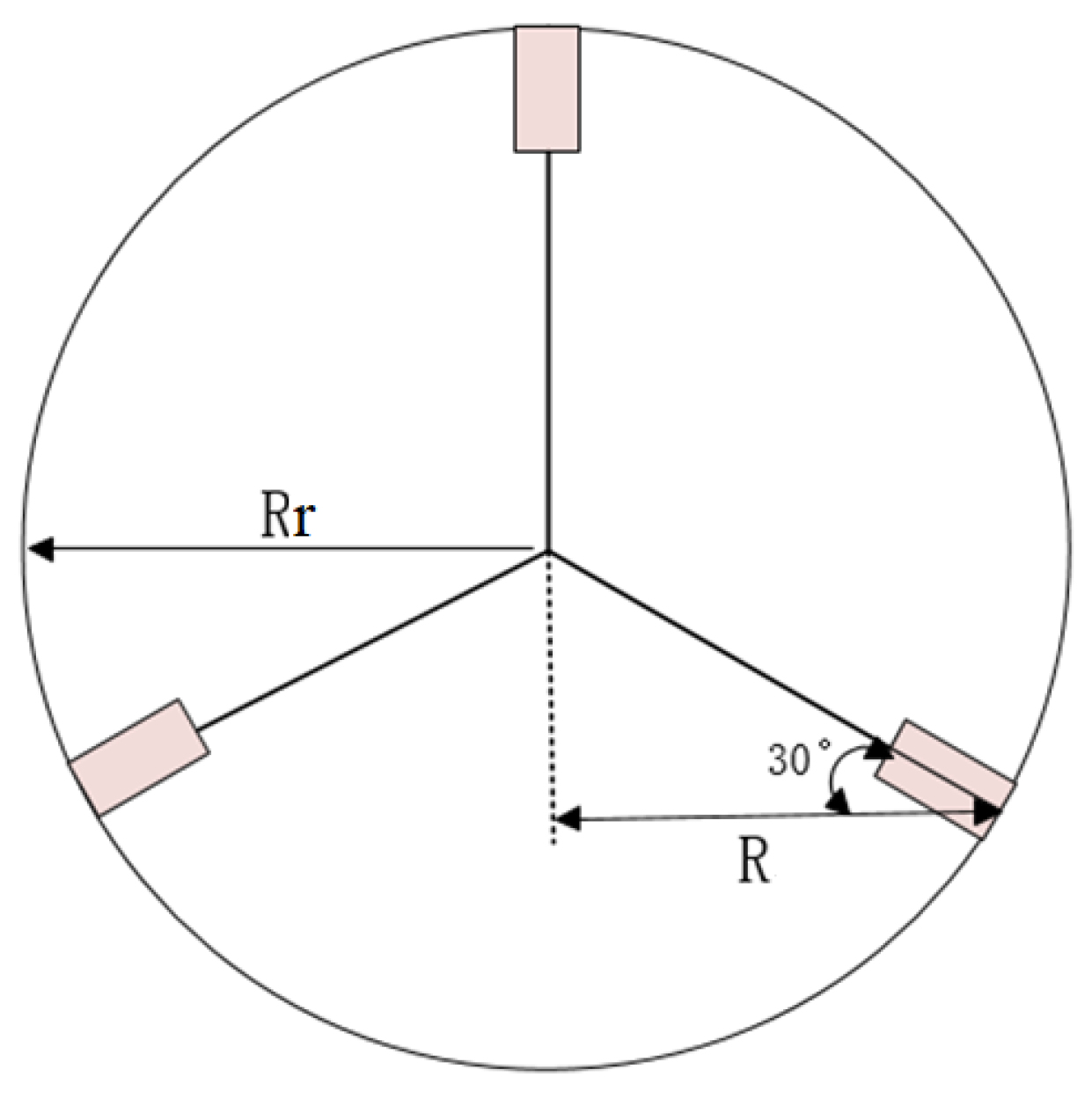
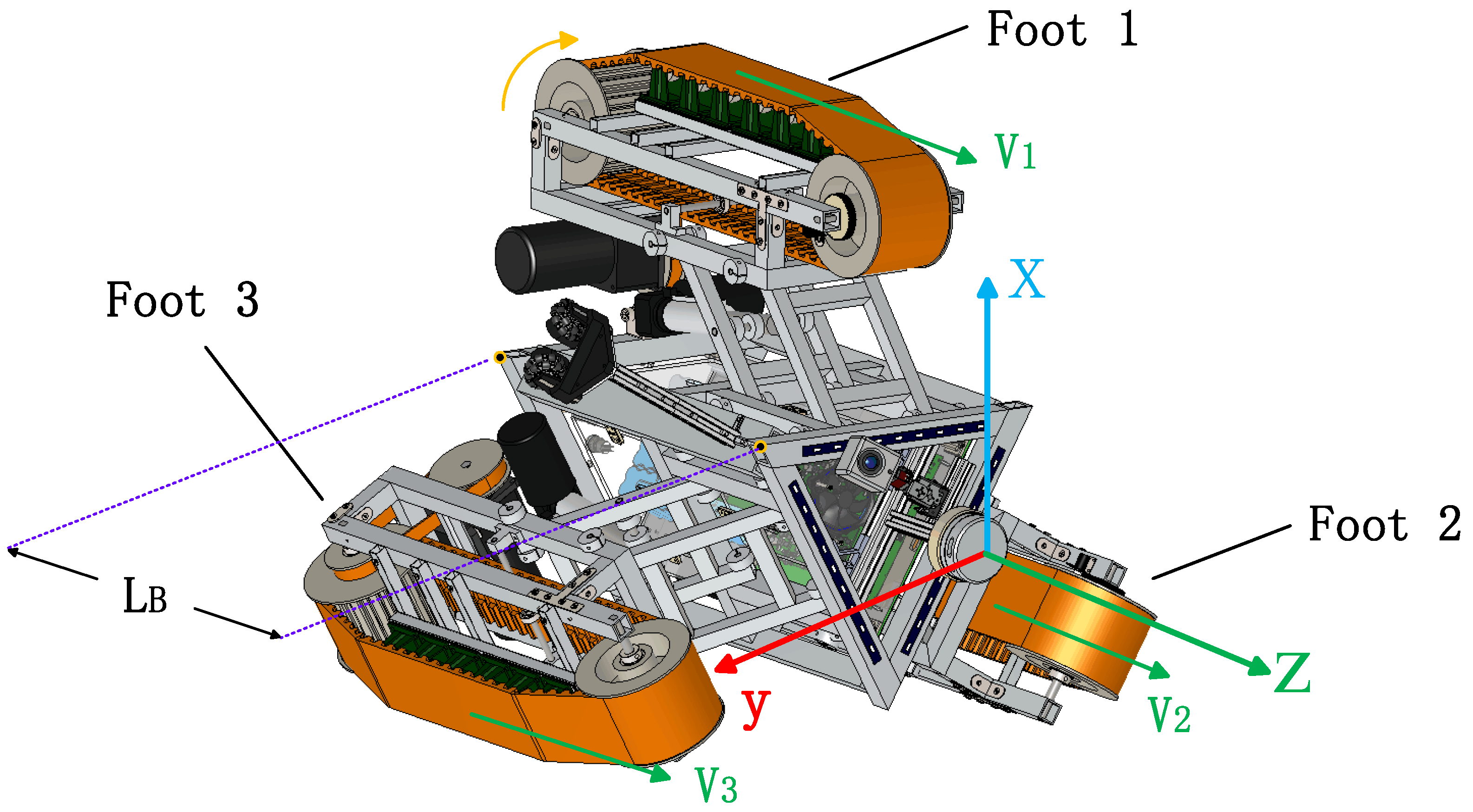
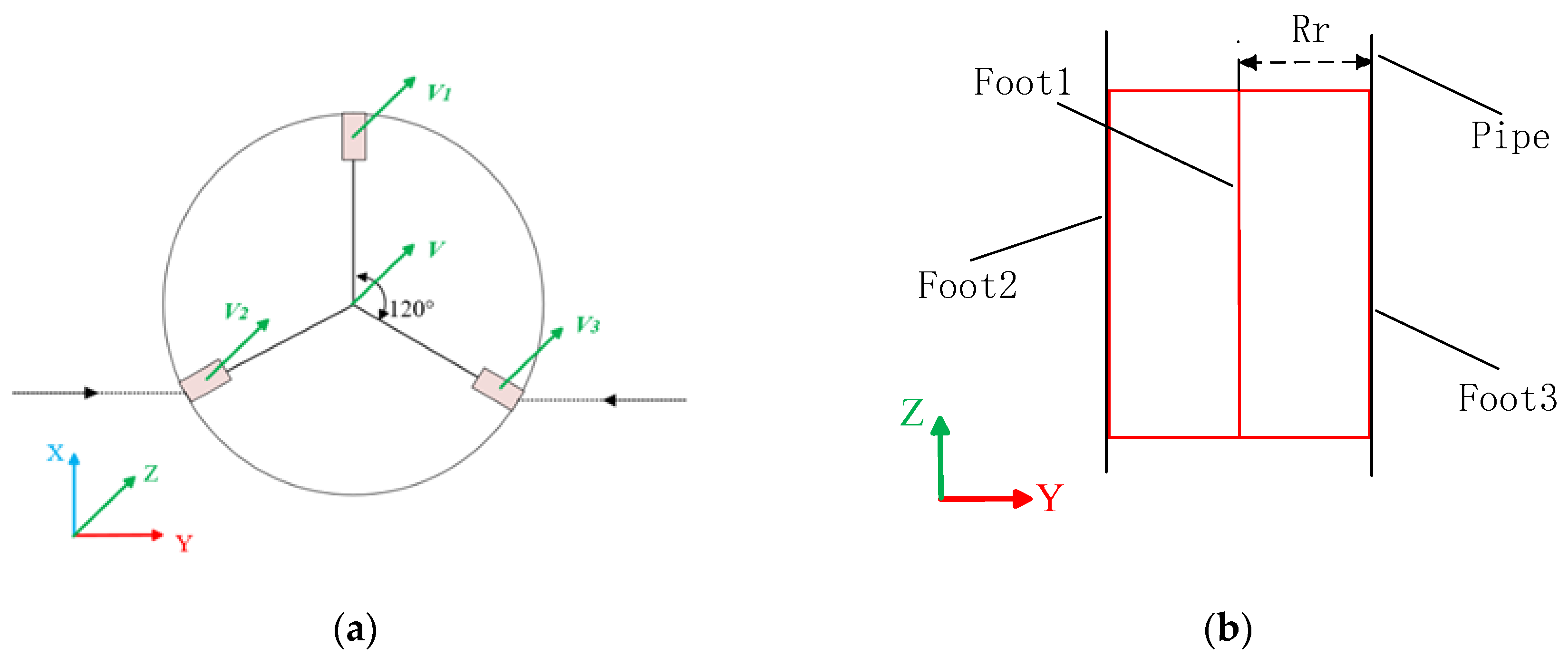
2.1. Establishment of Coordinate Axes
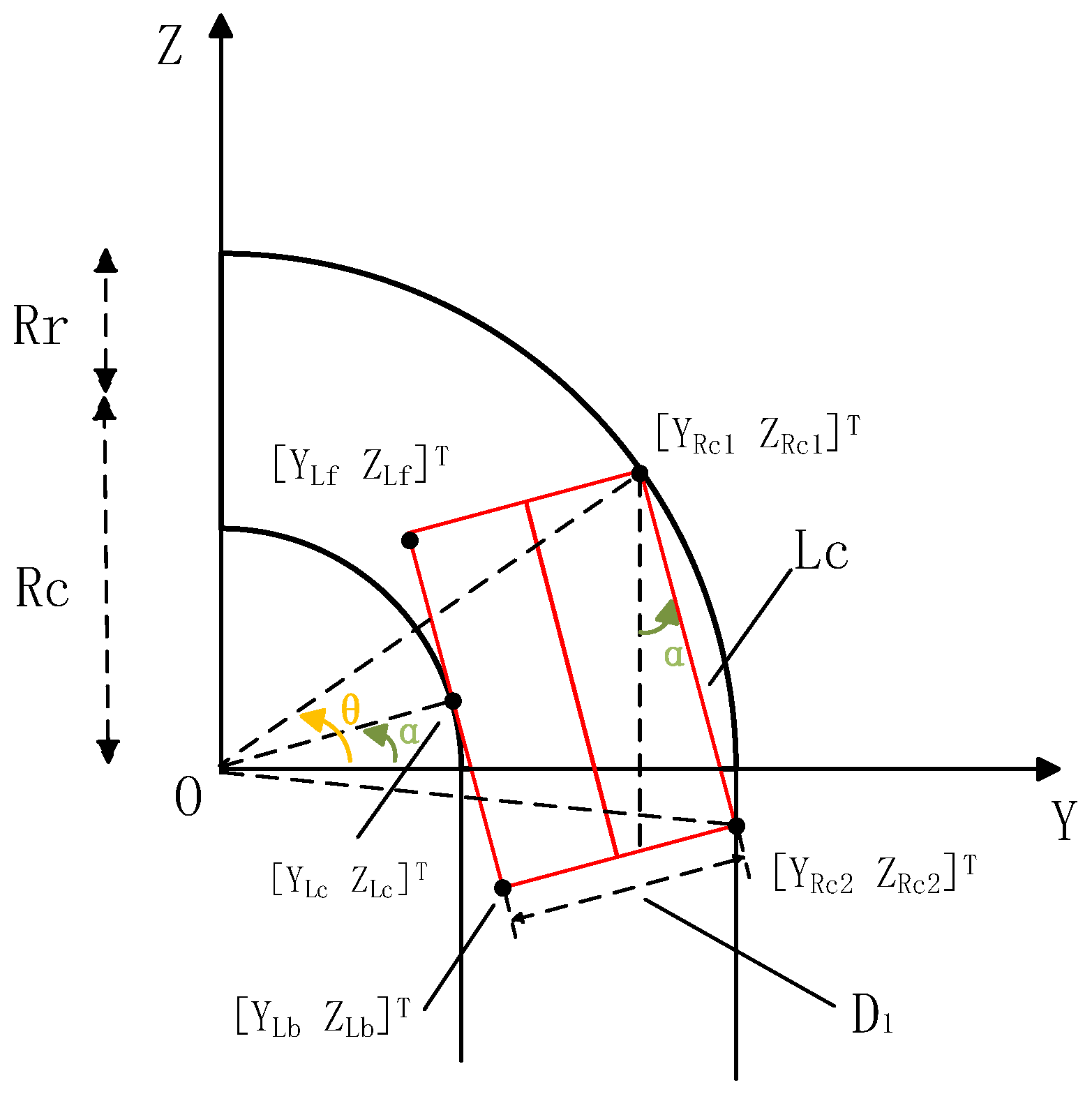
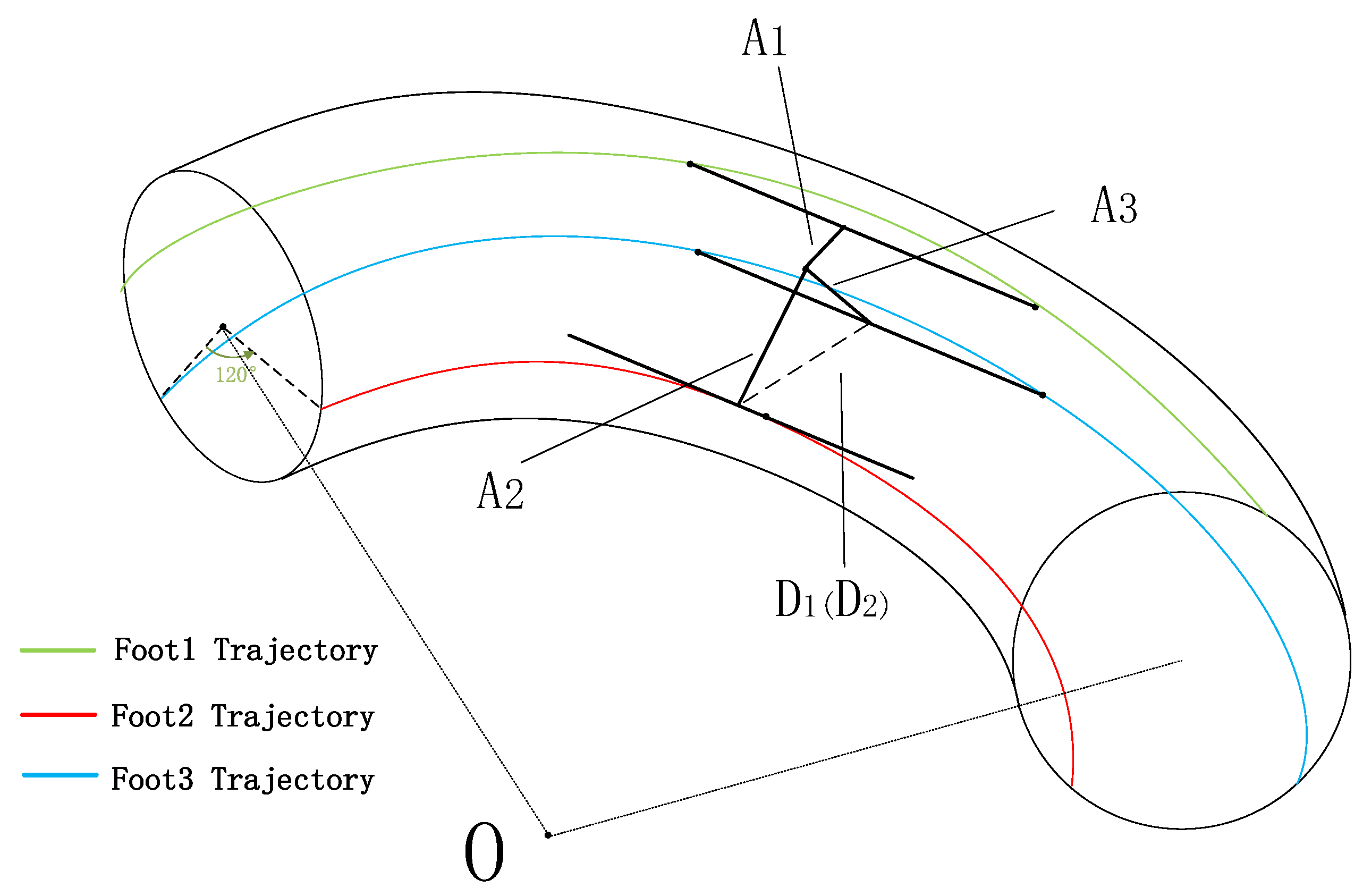
2.2. Restraint Analysis in the Bent Pipe
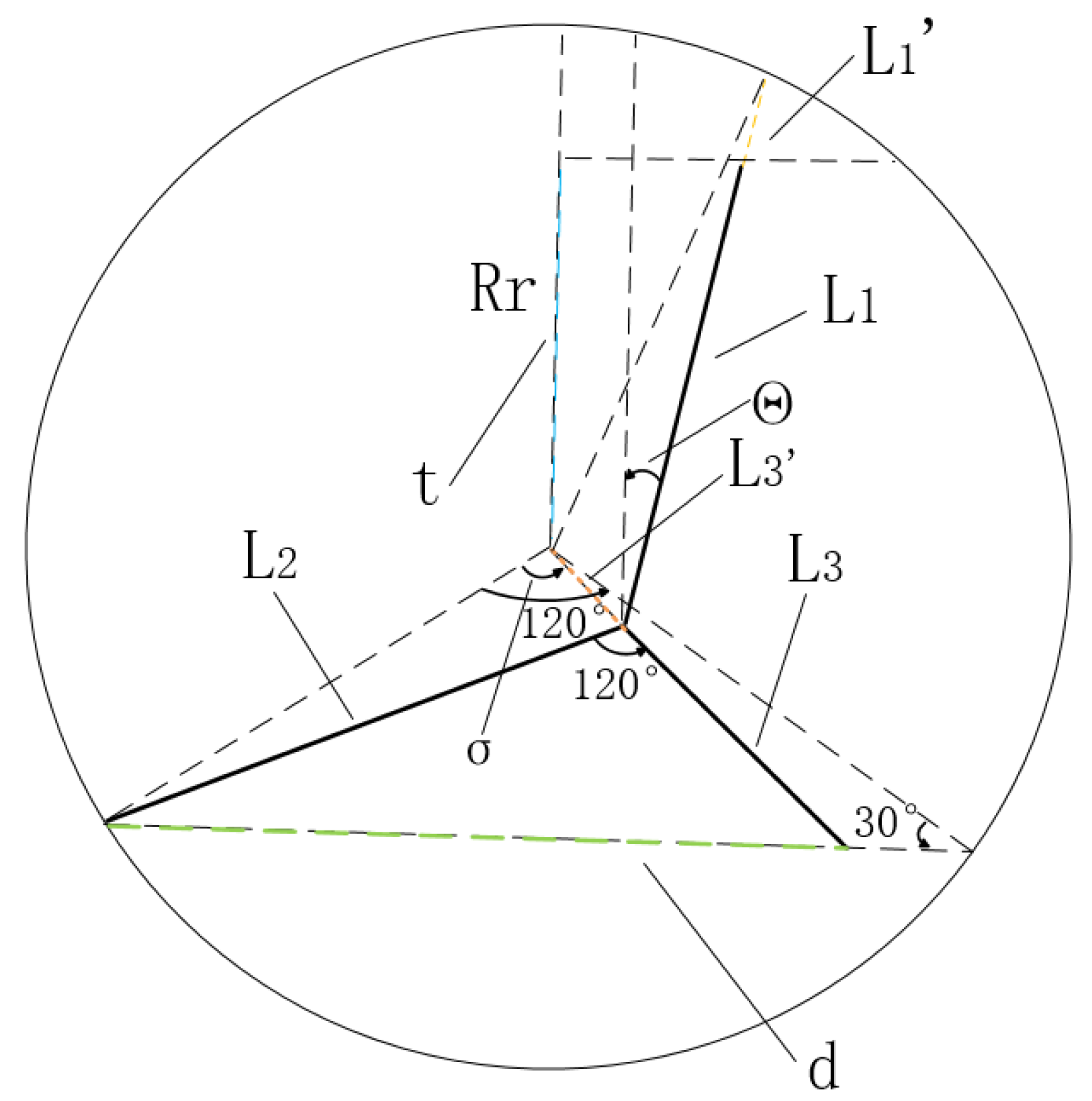
2.3. The Analysis of the Robot Telescopic Rod Device
3. Experiment and Analysis
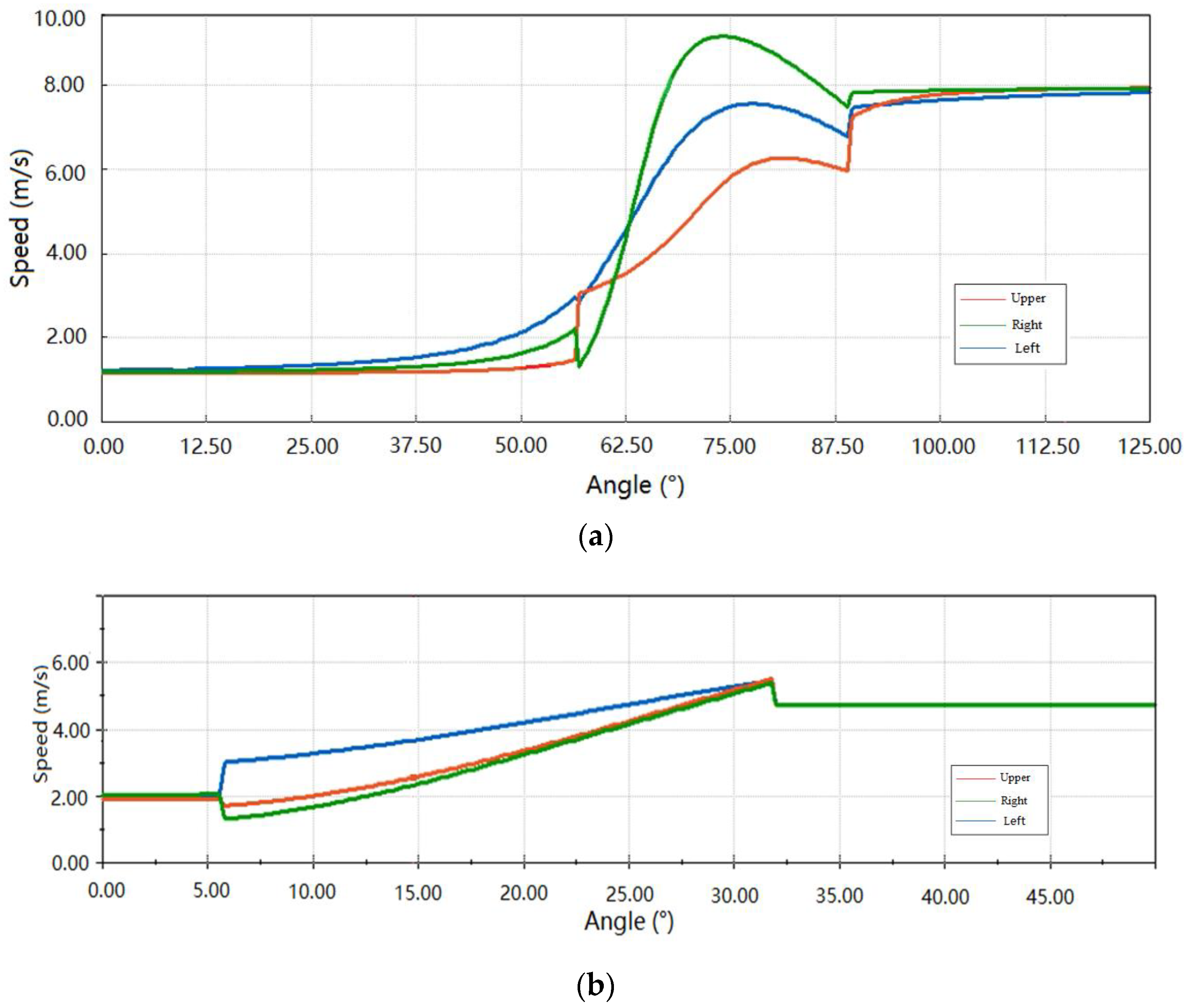
3.1. Simulation Conditions and Results
3.2. Experimental Environment and Control Strategy
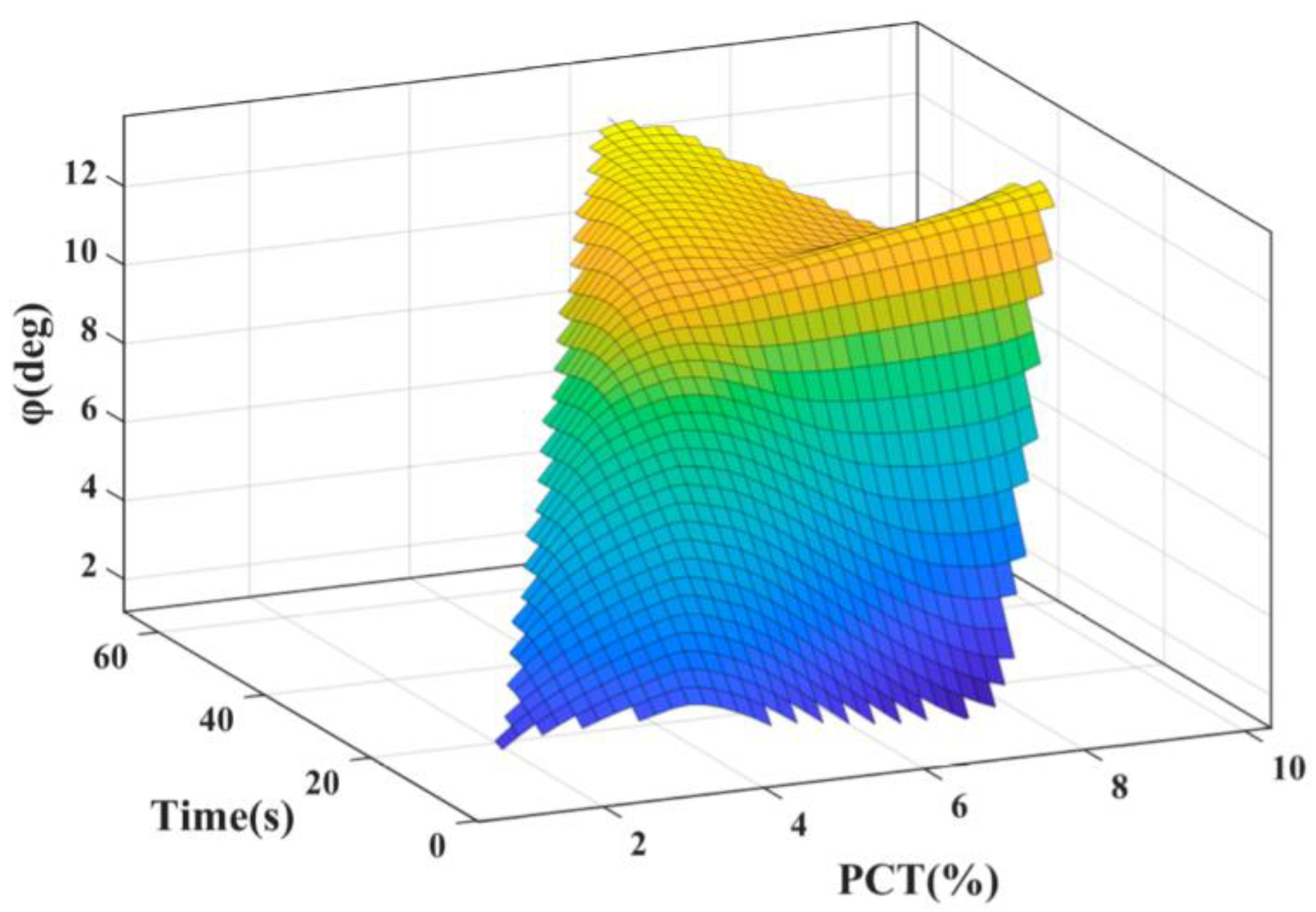
3.3. Experimental Results and Analysis
4. Conclusion and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Song, Z.; Ren, H.; Zhang, J.; Ge, S.S. Kinematic Analysis and Motion Control of Wheeled Mobile Robots in Cylindrical Workspaces. IEEE Trans. Autom. Sci. Eng. 2015, 13, 1207–1214. [Google Scholar] [CrossRef]
- Jun, C.; Deng, Z.Q.; Jiang, S.Y. Study of Locomotion Control Characteristics for Six Wheels Driven In-Pipe Robot. In Proceedings of the IEEE International Conference on Robotics & Biomimetics, Shenyang, China, 22–26 August 2004. [Google Scholar]
- Bandala, A.A.; Maningo, J.M.Z.; Fernando, A.H.; Vicerra, R.R.P.; Antonio, M.A.B.; Diaz, J.A.I.; Ligeralde, M.; Mascardo, P.A.R. Control and mechanical design of a multi-diameter tri-legged in-pipe traversing robot. In Proceedings of the IEEE/SICE International Symposium on System Integration, Paris, France, 14–16 January 2019. [Google Scholar]
- Li, T.; Ma, S.; Li, B.; Wang, M.; Wang, Y. Design and locomotion control strategy for a steerable in-pipe robot. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015. [Google Scholar]
- Kwon, Y.S.; Yi, B.J. Design and Motion Planning of a Two-Module Collaborative Indoor Pipeline Inspection Robot. IEEE Trans. Robot. 2012, 28, 681–696. [Google Scholar] [CrossRef]
- Kakogawa, A.; Ma, S. Speed analysis for three driving modules of an in-pipe inspection robots for passing through bent pipes. In Proceedings of the IEEE International Conference on Robotics & Biomimetics, Bali, Indonesia, 5–10 December 2014. [Google Scholar]
- Singh, P.; Ananthasuresh, G.K. A Compact and Compliant External Pipe-Crawling Robot. IEEE Trans. Robot. 2012, 29, 251–260. [Google Scholar] [CrossRef]
- Dertien, E.C.; Foumashi, M.M.; Pulles, K.; Stramigioli, S. Design of a robot for in-pipe inspection using omnidirectional wheels and active stabilization. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Wu, Y.; Noel, A.; Kim, D.D.; Youcef-Toumi, K.; Ben-Mansour, R. Design of a maneuverable swimming robot for in-pipe missions. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 4864–4871. [Google Scholar]
- Yamamoto, T.; Konyo, M.; Tadakuma, K.; Tadokoro, S. A self-locking-type expansion mechanism to achieve high holding force and pipe-passing capability for a pneumatic in-pipe robot. In Proceedings of the IEEE International Conference on Robotics & Automation, Singapore, 29 May–3 June 2017. [Google Scholar]
- Kim, D.W.; Park, C.H.; Kim, H.K.; Kim, S.B. Force adjustment of an active pipe inspection robot. In Proceedings of the Iccas-sice International Joint Conference, Fukuoka, Japan, 18–21 August 2009; pp. 3793–3797. [Google Scholar]
- Roh, S.G.; Choi, H. Differential-drive in-pipe robot for moving inside urban gas pipelines. IEEE Trans. Robot. 2005, 21, 1–17. [Google Scholar]
- Oya, T.; Okada, T. Development of a steerable, wheel-type, in-pipe robot and its path planning. Adv. Robot. 2005, 19, 635–650. [Google Scholar] [CrossRef]
- Kakogawa, A.; Ma, S.; Hirose, S. An in-pipe robot with underactuated parallelogram crawler modules. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Harish, P.; Venkateswarlu, V. Design and Motion Planning of Indoor Pipeline Inspection Robot. Int. J. Innov. Technol. Explor. Eng. (IJITEE) 2013, 3, 41. [Google Scholar]
- Zhang, Y.; Zhang, M.; Sun, H.; Jia, Q. Design and motion analysis of a flexible squirm pipe robot. In Proceedings of the 2010 International Conference on Intelligent System Design and Engineering Application, Changsha, China, 13–14 October 2010; pp. 527–531. [Google Scholar]
- Park, J.; Hyun, D.; Cho, W.-H.; Kim, T.-H.; Yang, H. Normal-force control for an in-pipe robot according to the inclination of pipelines. IEEE Trans. Ind. Electron. 2010, 58, 5304–5310. [Google Scholar] [CrossRef]
- Tourajizadeh, H.; Rezaei, M.; Sedigh, A.H. Optimal control of screw in-pipe inspection robot with controllable pitch rate. J. Intell. Robot. Syst. 2018, 90, 269–286. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, L.; Kim, J.-W. Design and analysis of independently adjustable large in-pipe robot for long-distance pipeline. Appl. Sci. 2020, 10, 3637. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Zhang, L.; Zhao, J.; Kim, K. Cornering Algorithm for a Crawler In-Pipe Inspection Robot. Symmetry 2020, 12, 2016. https://doi.org/10.3390/sym12122016
Xu L, Zhang L, Zhao J, Kim K. Cornering Algorithm for a Crawler In-Pipe Inspection Robot. Symmetry. 2020; 12(12):2016. https://doi.org/10.3390/sym12122016
Chicago/Turabian StyleXu, Liang, Liang Zhang, Jinzhou Zhao, and Kiwan Kim. 2020. "Cornering Algorithm for a Crawler In-Pipe Inspection Robot" Symmetry 12, no. 12: 2016. https://doi.org/10.3390/sym12122016
APA StyleXu, L., Zhang, L., Zhao, J., & Kim, K. (2020). Cornering Algorithm for a Crawler In-Pipe Inspection Robot. Symmetry, 12(12), 2016. https://doi.org/10.3390/sym12122016