An Improved Bat Algorithm Based on Lévy Flights and Adjustment Factors


Abstract
1. Introduction
2. Enhanced Bat Algorithm
2.1. Bat Algorithm
2.2. Dynamically Decreasing Inertia Weight
2.3. Lévy Flights
2.4. Speed Adjustment Factor
2.5. The Pseudocode of the LAFBA
| 1. Define objective function , |
| 2. Set the initial value of population size n, and |
| 3. Initialize pulse rates and loudness |
| 4. Initialize the bat population (Equation (1)) |
| 5. Evaluate and find |
| 6. while t ≤ N_gen |
| 7. for = 1 to n |
| 8. Adjust frequency (Equation (2)) |
| 9. Update inertia weight (Equation (9)) and (Equation (11)) |
| 10. Update the velocity (Equation (8)) and position vector (Equation (13)) of the bat |
| 11. if (rand > ) |
| 12. Select a solution among the best solutions |
| 13. Generate a local solution around selected best (Equation (5)) |
| 14. end if |
| 15. Evaluate objective function |
| 16. if (rand < & f() < f()) |
| 17. |
| 18. f() = f() |
| 19. Increase (Equation (7)) |
| 20. Reduce (Equation (6)) |
| 21. end if |
| 22. if () |
| 23. Update the best solution |
| 24. end if |
| 25. end for |
| 26. Rank the bats and find the current best |
| 27. |
| 28. end while |
| 29. Return , postprocess results and visualization |
3. Numerical Simulation and Analysis
3.1. Parameters Setting
3.2. Standard Optimization Functions
3.3. Simulation Result Comparison and Analysis
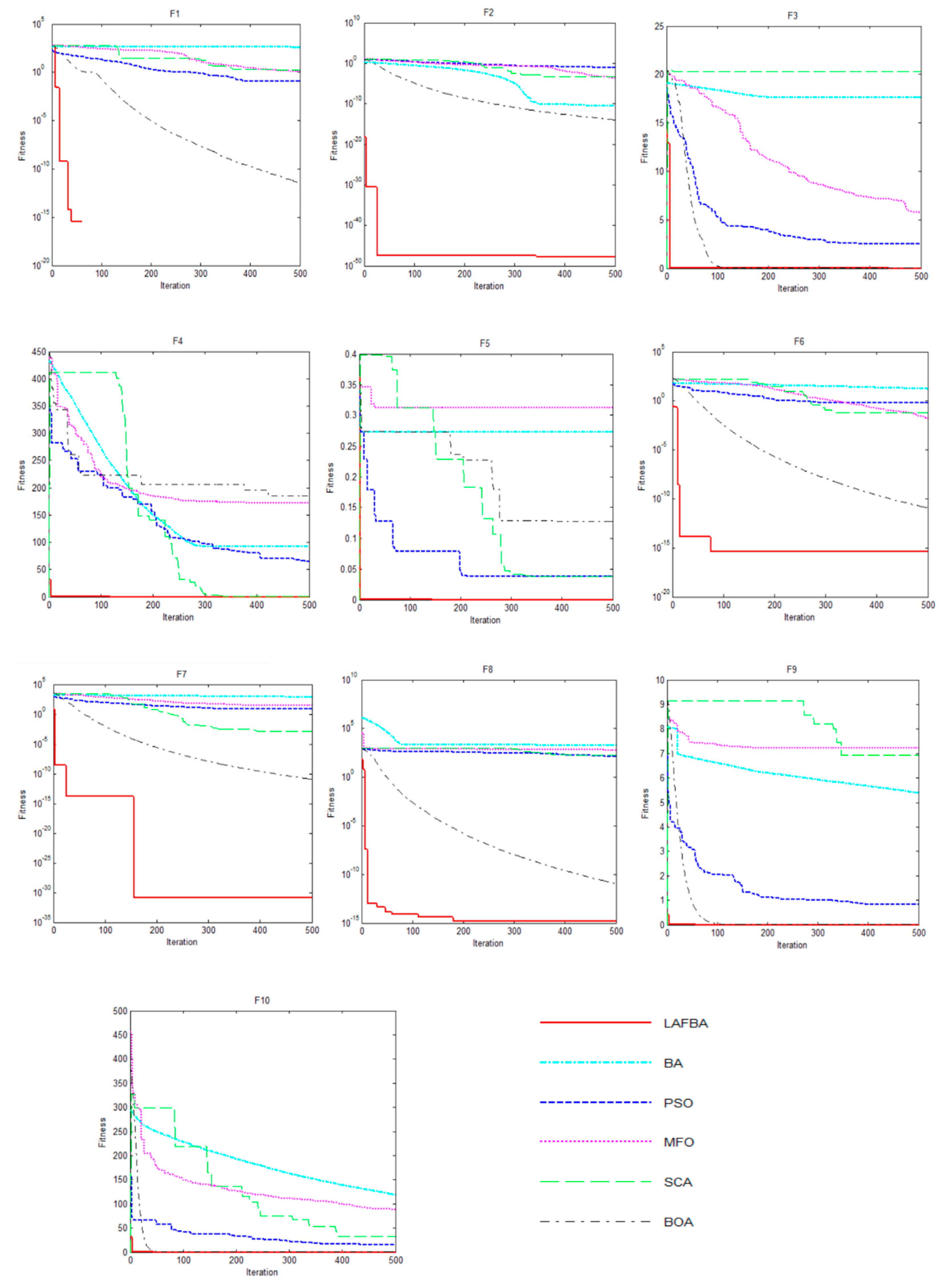
3.4. Convergence Curve Analysis
4. LAFBA for Classical Engineering Problems
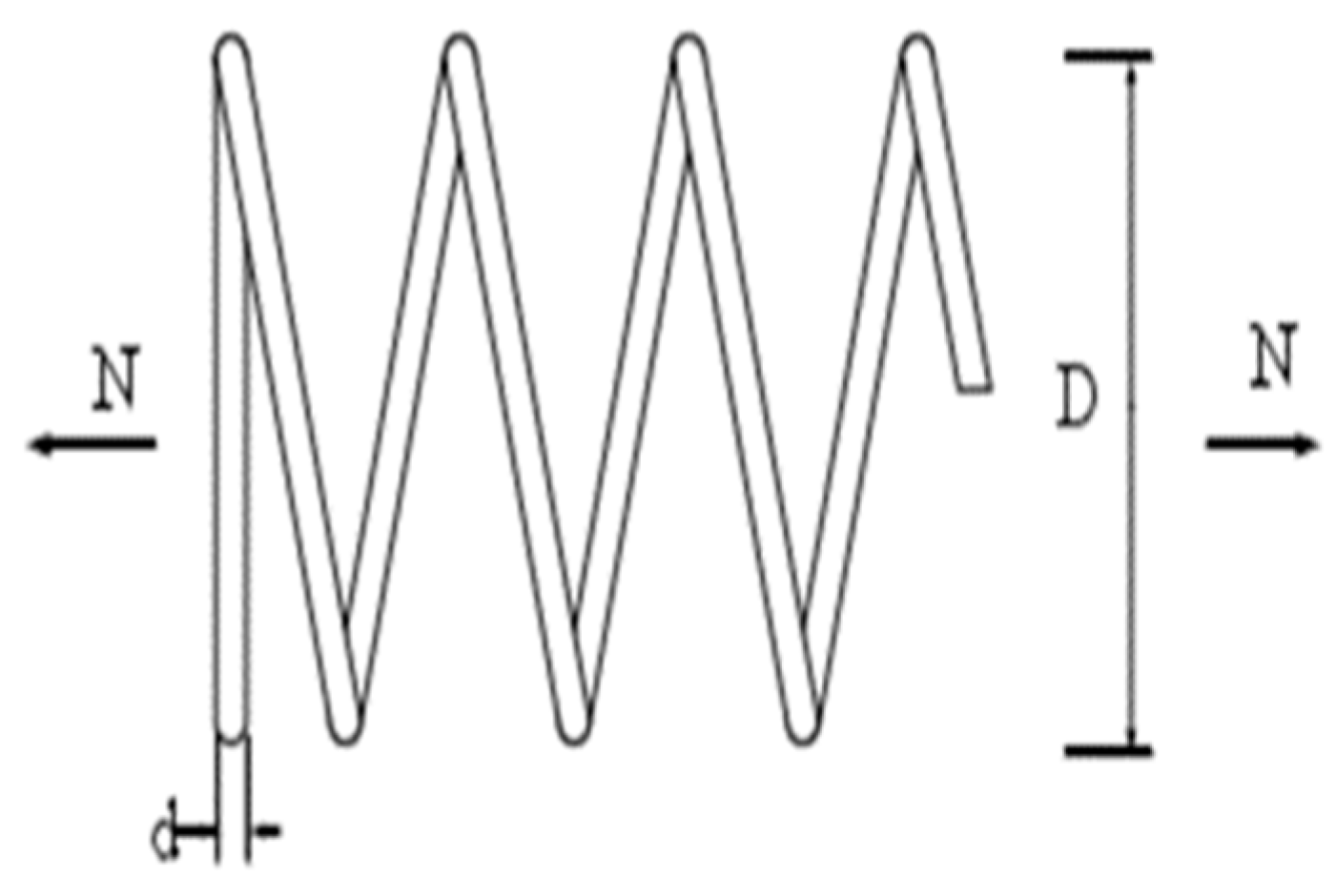
4.1. Tension/Compression Spring Design
| Consider | |
| Minimize | |
| Subject to | |
| Variable range | , , . |
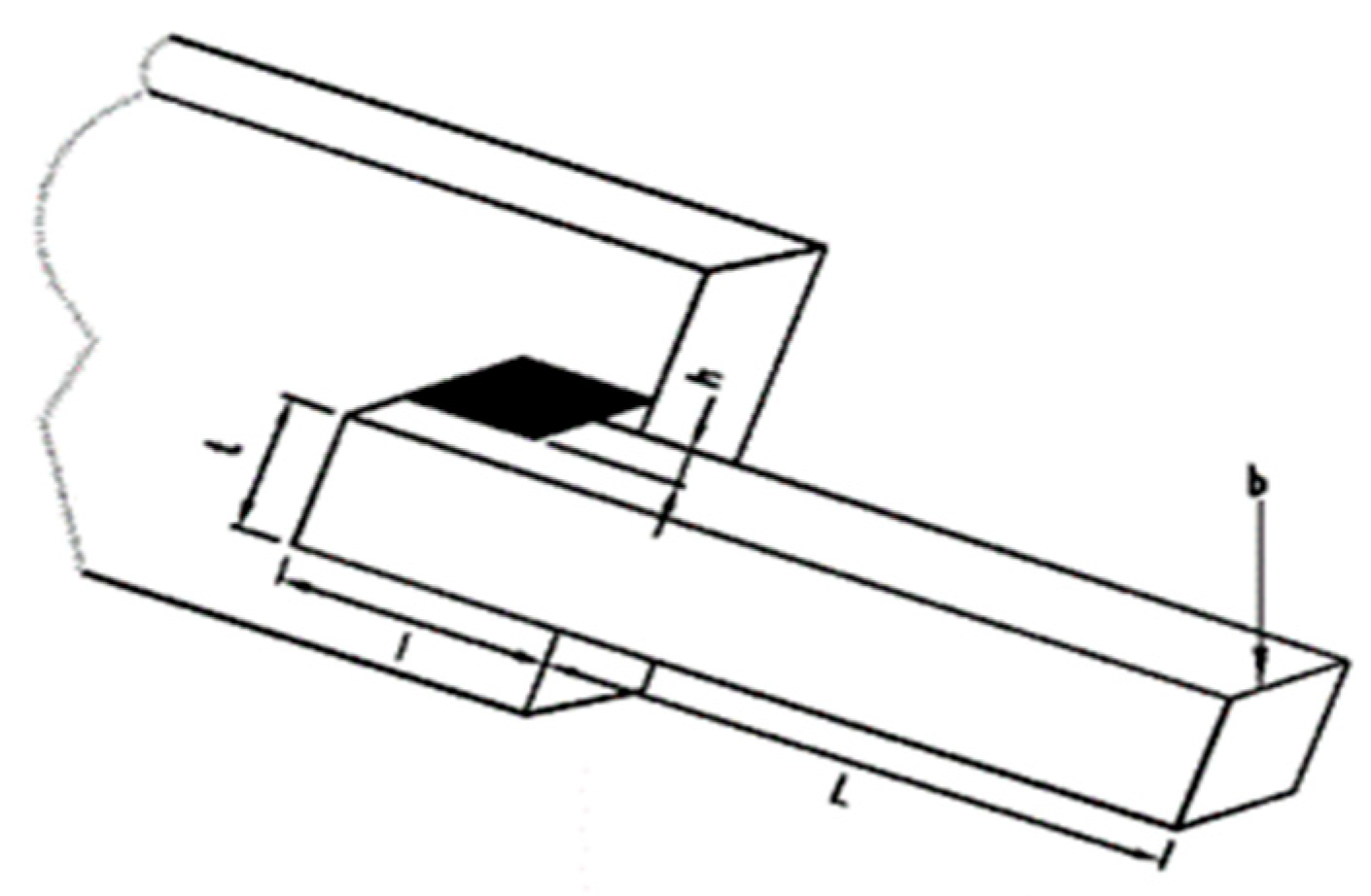
4.2. Welded Beam Design
| Consider | |
| Minimize | |
| Subject to | |
| Variable range | |
| where | |
| E = 30 × 106 psi, G = 12 × 106 psi, | |
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Holland, J.H. Erratum: Genetic Algorithms and the Optimal Allocation of Trials. Siam J. Comput. 1974, 3, 326. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. IEEE Int. Conf. Neural Netw. 1995, 2002, 1942–1948. [Google Scholar]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In MHS’95. Proceedings of the Sixth International Symposium on Micro Machine and Human Science; IEEE Press: Piscataway, NJ, USA, 1995; pp. 39–43. [Google Scholar]
- Dorigo, M.; Colorni, V.A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cyber. Part B Cyber. 1996, 26, 29–41. [Google Scholar] [CrossRef] [PubMed]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization. TR-06; Erciyes University: Kayseri, Turkey, 2005. [Google Scholar]
- Gandomi, A.H.; Alavi, A.H. Krill herd: A new bio-inspired optimization algorithm. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 4831–4845. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S. Cuckoo Search via Lévy flights. In Proceedings of the 2009 World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Yang, X.S.; Deb, S. Engineering Optimisation by Cuckoo Search. Int. J. Math. Modell. Numer. Optim. 2010, 1, 330–343. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl.-Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Sergeyev, Y.D.; Kvasov, D.E.; Mukhametzhanov, M.S. Operational zones for comparing metaheuristic and deterministic one-dimensional global optimization algorithms. Math. Comput. Simul. 2017, 141, 96–109. [Google Scholar] [CrossRef]
- Yang, X.S. A New Metaheuristic Bat-Inspired Algorithm. Comput. Knowl. Technol. 2010, 284, 65–74. [Google Scholar]
- Ramli, M.R.; Abas, Z.A.; Desa, M.I.; Abidin, Z.Z.; Alazzam, M.B. Enhanced Convergence of Bat Algorithm Based on Dimensional and Inertia Weight Factor. J. King Saud Univ.-Comput. Inf. Sci. 2018. [Google Scholar] [CrossRef]
- Banati, H.; Chaudhary, R. Multi-Modal Bat Algorithm with Improved Search (MMBAIS). J. Comput. Sci. 2017, 23, 130–144. [Google Scholar] [CrossRef]
- Al-Betar, M.A.; Awadallah, M.A.; Faris, H.; Yang, X.S.; Khader, A.T.; Alomari, O.A. Bat-inspired Algorithms with Natural Selection mechanisms for Global optimization. Neurocomputing 2018, 273, 448–465. [Google Scholar] [CrossRef]
- Li, Y.; Pei, Y.H.; Liu, J.S. Bat optimization algorithm combining uniform variation and Gaussian variation. Control Decis. 2017, 32, 1775–1781. [Google Scholar]
- Chakri, A.; Khelif, R.; Benouaret, M.; Yang, X.S. New directional bat algorithm for continuous optimization problems. Expert Syst. Appl. 2017, 69, 159–175. [Google Scholar] [CrossRef]
- Al-Betar, M.A.; Awadallah, M.A. Island Bat Algorithm for Optimization. Expert Syst. Appl. 2018, 107, 126–145. [Google Scholar] [CrossRef]
- Laudis, L.L.; Shyam, S.; Jemila, C.; Suresh, V. MOBA: Multi Objective Bat Algorithm for Combinatorial Optimization in VLSI. Proc. Comput. Sci. 2018, 125, 840–846. [Google Scholar] [CrossRef]
- Tawhid, M.A.; Dsouza, K.B. Hybrid Binary Bat Enhanced Particle Swarm Optimization Algorithm for solving feature selection problems. Appl. Comput. Inf. 2018. [Google Scholar] [CrossRef]
- Osaba, E.; Yang, X.S.; Diaz, F.; Lopez-Garcia, P.; Carballedo, R. An improved discrete bat algorithm for symmetric and asymmetric Traveling Salesman Problems. Eng. Appl. Artif. Intell. 2016, 48, 59–71. [Google Scholar] [CrossRef]
- Mohamed, T.M.; Moftah, H.M. Simultaneous Ranking and Selection of Keystroke Dynamics Features Through A Novel Multi-Objective Binary Bat Algorithm. Future Comput. Inf. J. 2018, 3, 29–40. [Google Scholar] [CrossRef]
- Hamidzadeh, J.; Sadeghi, R.; Namaei, N. Weighted Support Vector Data Description based on Chaotic Bat Algorithm. Appl. Soft Comput. 2017, 60, 540–551. [Google Scholar] [CrossRef]
- Qi, Y.H.; Cai, Y.G.; Cai, H. Discrete Bat Algorithm for Vehicle Routing Problem with Time Window. Chin. J. Electron. 2018, 46, 672–679. [Google Scholar]
- Bekdaş, G.; Nigdeli, S.M.; Yang, X.S. A novel bat algorithm based optimum tuning of mass dampers for improving the seismic safety of structures. Eng. Struct. 2018, 159, 89–98. [Google Scholar] [CrossRef]
- Ameur, M.S.B.; Sakly, A. FPGA based hardware implementation of Bat Algorithm. Appl. Soft Comput. 2017, 58, 378–387. [Google Scholar] [CrossRef]
- Chaib, L.; Choucha, A.; Arif, S. Optimal design and tuning of novel fractional order PID power system stabilizer using a new metaheuristic Bat algorithm. Ain Shams Eng. J. 2017, 8, 113–125. [Google Scholar] [CrossRef]
- Mohammad, E.; Sayed-Farhad, M.; Hojat, K. Bat algorithm for dam–reservoir operation. Environ. Earth Sci. 2018, 77, 510. [Google Scholar]
- Liu, J.S.; Ji, H.Y.; Li, Y. Robot Path Planning Based on Improved Bat Algorithm and Cubic Spline Interpolation. Acta Autom. Sin. 2019. [Google Scholar]
- Shi, Y.; Eberhart, R. Modified particle swarm optimizer. Proc. IEEE ICEC Conf. Anchorage 1999, 69–73. [Google Scholar]
- Du, Y.H. Advanced Mathematics; Beijing Jiaotong University Press: Beijing, China, 2014. [Google Scholar]
- Ball, F.; Bao, Y.N. Predict Society; Contemporary China Publishing House: Beijing, China, 2007. [Google Scholar]
- Yang, X.S.; Karamanoglu, M.; He, X. Flower pollination algorithm: A novel approach for multiobjective optimization. Eng. Optim. 2014, 46, 1222–1237. [Google Scholar] [CrossRef]
- Jamil, M.; Yang, X.S. A Literature Survey of Benchmark Functions for Global Optimization Problems. Mathematics 2013, 4, 150–194. [Google Scholar]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for solving optimization problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Arora, S.; Singh, S. Butterfly optimization algorithm: A novel approach for global optimization. Soft Comput. 2019, 23, 715–734. [Google Scholar] [CrossRef]
- Derrac, J.; García, S.; Molina, D.; Herrera, F. A practical tutorial on the use of nonparametric statistical tests as a methodology for comparing evolutionary and swarm intelligence algorithms. Swarm Evolut. Comput. 2011, 1, 3–18. [Google Scholar] [CrossRef]
- Wilcoxon, F. Individual Comparisons by Ranking Methods. Biom. Bull. 1945, 1, 80–83. [Google Scholar] [CrossRef]
- García, S.; Molina, D.; Lozano, M.; Herrera, F. A study on the use of non-parametric tests for analyzing the evolutionary algorithms’ behaviour: A case study on the CEC’2005 Special Session on Real Parameter Optimization. J. Heuristics 2009, 15, 617–644. [Google Scholar]
- Zhao, Z.Y. Introduction to optimum design. Probabilistic Eng. Mech. 1990, 5, 100. [Google Scholar]
- Belegundu, A.D.; Arora, J.S. A study of mathematical programming methods for structural optimization. Part I: Theory. Int. J. Numer. Methods Eng. 2010, 21, 1601–1623. [Google Scholar] [CrossRef]
- Kaveh, A.; Talatahari, S. An improved ant colony optimization for constrained engineering design problems. Eng. Comput. 2010, 27, 155–182. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A Gravitational Search Algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- He, Q.; Wang, L. An effective co-evolutionary particle swarm optimization for constrained engineering design problems. Eng. Appl. Artif. Intell. 2007, 20, 89–99. [Google Scholar] [CrossRef]
- Mezura-Montes, E.; Coello, C.A.C. An empirical study about the usefulness of evolution strategies to solve constrained optimization problems. Int. J. Gen. Syst. 2008, 37, 443–473. [Google Scholar]
- Coello Coello, C.A. Use of a Self-Adaptive Penalty Approach for Engineering Optimization Problems. Comput. Ind. 2000, 41, 113–127. [Google Scholar] [CrossRef]
- Mahdavi, M.; Fesanghary, M.; Damangir, E. An improved harmony search algorithm for solving optimization problems. Appl. Math. Comput. 2007, 188, 1567–1579. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Li, L.J.; Huang, Z.B.; Liu, F.; Wu, Q.H. A heuristic particle swarm optimizer for optimization of pin connected structures. Comput. Struct. 2007, 85, 340–349. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Krohling, R.A.; Coelho, L.D.S. Coevolutionary Particle Swarm Optimization Using Gaussian Distribution for Solving Constrained Optimization Problems. IEEE Trans. Cyber. 2007, 36, 1407–1416. [Google Scholar] [CrossRef]
- Coello, C.; Carlos, A. constraint-handling using an evolutionary multi objective optimization technique. Civ. Eng. Environ. Syst. 2000, 17, 319–346. [Google Scholar] [CrossRef]
- Deb, K. Optimal design of a welded beam via genetic algorithms. AIAA J. 1991, 29, 2013–2015. [Google Scholar]
- Deb, K. An efficient constraint handling method for genetic algorithms. Comput. Methods Appl. Mech. Eng. 2000, 186, 311–338. [Google Scholar] [CrossRef]
- Lee, K.S.; Geem, Z.W. A new meta-heuristic algorithm for continuous engineering optimization: Harmony search theory and practice. Comput. Methods Appl. Mech. Eng. 2005, 194, 3902–3933. [Google Scholar] [CrossRef]
- MartÍ, V.; Robledo, L.M. Multi-Verse Optimizer: A nature-inspired algorithm for global optimization. Neural Comput. Appl. 2016, 27, 495–513. [Google Scholar]
- Askarzadeh, A. A novel metaheuristic method for solving constrained engineering optimization problems: Crow search algorithm. Comput. Struct. 2016, 169, 1–12. [Google Scholar] [CrossRef]
- Ragsdell, K.M.; Phillips, D.T. Optimal Design of a Class of Welded Structures Using Geometric Programming. J. Eng. Ind. 1976, 98, 1021–1025. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Function | Best | Worst | Average | SD | Function | Best | Worst | Average | SD |
|---|---|---|---|---|---|---|---|---|---|---|
| LAFBA | F1 | 0 | 0 | 0 | 0 | F6 | 0 | 7.89 × 10−16 | 1.05 × 10−16 | 1.98 × 10−16 |
| BA | 1.27 × 101 | 1.46 × 102 | 7.99 × 101 | 3.52 × 101 | 7.48 × 10−2 | 8.76 × 101 | 3.03 × 101 | 2.63 × 101 | ||
| PSO | 2.17 × 10−1 | 2.45 | 9.51 × 10−1 | 4.52 × 10−1 | 5.19 × 10−6 | 6.80 × 10−3 | 8.89 × 10−4 | 1.54 × 10−3 | ||
| MFO | 7.92 × 10−11 | 7.58 × 10−1 | 1.51 × 10−1 | 1.44 × 10−1 | 9.89 × 10−17 | 1.48 × 10−13 | 1.10 × 10−14 | 2.82 × 10−14 | ||
| SCA | 1.34 × 10−14 | 8.98 × 10−1 | 1.56 × 10−1 | 2.16 × 10−1 | 4.64 × 10−18 | 1.69 × 10−10 | 7.33 × 10−12 | 3.16 × 10−11 | ||
| BOA | 3.11 × 10−14 | 1.45 × 10−12 | 2.95 × 10−13 | 3.26 × 10−13 | 5.84 × 10−12 | 1.03 × 10−11 | 8.24 × 10−12 | 1.16 × 10−12 | ||
| LAFBA | F2 | 0 | 3.08 × 10−31 | 1.63 × 10−32 | 5.77 × 10−32 | F7 | 0 | 1.53 × 10−15 | 1.67 × 10−16 | 3.98 × 10−16 |
| BA | 6.74 × 10−14 | 7.29 × 10−13 | 2.85 × 10−13 | 1.51 × 10−13 | 4.63 × 10−6 | 4.76 × 101 | 7.93 | 9.83 | ||
| PSO | 2.62 × 10−11 | 8.69 × 10−7 | 7.48 × 10−8 | 1.91 × 10−7 | 5.19 × 10−6 | 6.80 × 10−3 | 8.89 × 10−4 | 1.54 × 10−3 | ||
| MFO | 2.11 × 10−29 | 3.17 × 10−21 | 1.11 × 10−22 | 5.78 × 10−22 | 1.17 × 10−16 | 5.02 × 10−13 | 5.50 × 10−14 | 1.16 × 10−13 | ||
| SCA | 1.15 × 10−30 | 7.54 × 10−20 | 3.46 × 10−21 | 1.42 × 10−20 | 9.03 × 10−18 | 4.87 × 10−12 | 3.70 × 10−13 | 9.31 × 10−13 | ||
| BOA | 4.12 × 10−15 | 1.17 × 10−14 | 7.28 × 10−15 | 1.84 × 10−15 | 6.40 × 10−12 | 1.26 × 10−11 | 9.46 × 10−12 | 1.46 × 10−12 | ||
| LAFBA | F3 | 0 | 2.74 × 10−8 | 7.01 × 10−9 | 8.65 × 10−9 | F8 | 0 | 3.26 × 10−15 | 4.89 × 10−16 | 9.14 × 10−16 |
| BA | 1.21 × 101 | 1.94 × 101 | 1.74 × 101 | 1.51 | 1.31 | 8.01 × 101 | 2.58 × 101 | 1.92 × 101 | ||
| PSO | 2.94 × 10−3 | 1.17 | 3.73 × 10−1 | 5.25 × 10−1 | 1.05 × 10−3 | 2.96 × 10−1 | 5.96 × 10−2 | 7.38 × 10−2 | ||
| MFO | 2.99 × 10−8 | 5.09 | 4.07 × 10−1 | 1.05 | 2.45 × 10−6 | 2.51 × 102 | 2.57 × 101 | 5.80 × 101 | ||
| SCA | 7.17 × 10−10 | 1.69 × 10−4 | 7.00 × 10−6 | 3.07 × 10−5 | 1.81 × 10−9 | 9.82 × 10−3 | 9.40 × 10−4 | 2.48 × 10−3 | ||
| BOA | 1.65 × 10−9 | 6.14 × 10−9 | 3.49 × 10−9 | 1.20 × 10−9 | 7.47 × 10−12 | 1.14 × 10−11 | 9.61 × 10−12 | 1.09 × 10−12 | ||
| LAFBA | F4 | 0 | 9.59 × 10−14 | 1.50 × 10−14 | 2.48 × 10−14 | F9 | 0 | 1.23 × 10−8 | 2.51 × 10−9 | 4.09 × 10−9 |
| BA | 1.79 × 101 | 8.76 × 101 | 4.78 × 101 | 1.95 × 101 | 1.65 | 5.08 | 3.46 | 9.33 | ||
| PSO | 1.31 | 3.02 × 101 | 9.41 | 6.93 | 2.14 × 10−2 | 2.94 × 10−1 | 8.88 × 10−2 | 5.66 × 10−2 | ||
| MFO | 5.97 | 6.28 × 101 | 2.70 × 101 | 1.39 × 101 | 9.20 × 10−2 | 4.80 | 1.37 | 1.16 | ||
| SCA | 2.56 × 10−12 | 2.41 × 101 | 2.44 | 6.64 | 1.09 × 10−7 | 3.34 × 10−3 | 3.59 × 10−4 | 6.97 × 10−4 | ||
| BOA | 4.26 × 10−14 | 5.67 × 101 | 3.10 × 101 | 2.18 × 101 | 3.77 × 10−9 | 5.34 × 10−9 | 4.50 × 10−9 | 4.30 × 10−10 | ||
| LAFBA | F5 | 0 | 6.11 × 10−16 | 8.23 × 10−17 | 1.52 × 10−16 | F10 | 0 | 9.09 × 10−16 | 9.00 × 10−17 | 2.36 × 10−16 |
| BA | 9.72 × 10−3 | 2.28 × 10−1 | 1.31 × 10−1 | 5.67 × 10−2 | 6.91 | 1.58 × 102 | 6.14 × 101 | 3.83 × 101 | ||
| PSO | 9.72 × 10−3 | 7.82 × 10−2 | 2.67 × 10−2 | 1.68 × 10−2 | 7.82 × 10−4 | 9.71 × 10−2 | 2.89 × 10−2 | 3.03 × 10−2 | ||
| MFO | 3.72 × 10−2 | 2.28 × 10−1 | 1.28 × 10−1 | 4.60 × 10−2 | 1.59 × 10−5 | 1.75 × 101 | 3.35 | 6.25 | ||
| SCA | 9.72 × 10−3 | 3.72 × 10−2 | 1.06 × 10−2 | 5.02 × 10−3 | 8.55 × 10−10 | 0.02047 | 9.25 × 10−4 | 0.003736 | ||
| BOA | 3.72 × 10−2 | 8.08 × 10−2 | 7.18 × 10−2 | 1.47 × 10−2 | 5.97 × 10−12 | 1.11 × 10−11 | 9.02 × 10−12 | 1.38 × 10−12 |
| Algorithm | Function | Best | Worst | Average | SD | Function | Best | Worst | Average | SD |
|---|---|---|---|---|---|---|---|---|---|---|
| LAFBA | F1 | 0 | 1.33 × 10−15 | 1.42 × 10−16 | 3.01 × 10−16 | F6 | 0 | 1.50 × 10−14 | 3.34 × 10−15 | 4.40 × 10−15 |
| BA | 9.85 × 101 | 5.36 × 102 | 3.23 × 102 | 1.08 × 102 | 1.85 | 3.35 × 102 | 1.86 × 102 | 8.73 × 101 | ||
| PSO | 5.80 × 10−2 | 3.46 × 10−1 | 1.66 × 10−1 | 7.21 × 10−2 | 1.49 × 10−1 | 9.03 × 10−1 | 3.74 × 10−1 | 1.56 × 10−1 | ||
| MFO | 9.48 × 10−1 | 2.71 × 102 | 2.22 × 101 | 6.11 × 101 | 6.42 × 10−3 | 2.62 × 101 | 3.55 | 9.05 | ||
| SCA | 5.39 × 10−1 | 7.04 | 1.49 | 1.21 | 8.99 × 10−5 | 1.55 | 9.02 × 10−2 | 2.81 × 10−1 | ||
| BOA | 7.17 × 10−13 | 1.73 × 10−11 | 6.82 × 10−12 | 4.58 × 10−12 | 9.88 × 10−12 | 1.20 × 10−11 | 1.10 × 10−11 | 5.75 × 10−13 | ||
| LAFBA | F2 | 0 | 1.14 × 10−28 | 6.72 × 10−30 | 2.13 × 10−29 | F7 | 0 | 1.75 × 10−13 | 3.06 × 10−14 | 5.03 × 10−14 |
| BA | 2.18 × 10−11 | 6.16 × 10−8 | 2.18 × 10−9 | 1.14 × 10−8 | 4.00 × 101 | 1.31 × 103 | 5.37 × 102 | 2.94 × 102 | ||
| PSO | 4.78 × 10−4 | 2.69 | 1.16 × 10−1 | 4.96 × 10−1 | 2.22 | 3.37 × 101 | 8.28 | 8.07 | ||
| MFO | 3.59 × 10−6 | 2.86 × 10−3 | 2.43 × 10−4 | 5.34 × 10−4 | 3.87 × 10−2 | 7.87 × 102 | 2.01 × 102 | 2.24 × 102 | ||
| SCA | 5.29 × 10−7 | 2.01 × 10−1 | 1.03 × 10−2 | 3.66 × 10−2 | 1.44 × 10−3 | 6.09 | 4.90 × 10−1 | 1.12 | ||
| BOA | 8.92 × 10−15 | 1.56 × 10−14 | 1.15 × 10−14 | 1.35 × 10−15 | 1.10 × 10−11 | 1.37 × 10−11 | 1.23 × 10−11 | 7.91 × 10−13 | ||
| LAFBA | F3 | 0 | 1.04 × 10−7 | 2.42 × 10−8 | 3.32 × 10−8 | F8 | 0 | 3.70 × 10−14 | 7.39 × 10−15 | 1.15 × 10−14 |
| BA | 1.36 × 101 | 1.90 × 101 | 1.75 × 101 | 1.15 | 1.21 × 101 | 2.27 × 103 | 2.42 × 102 | 4.05 × 102 | ||
| PSO | 1.52 | 4.28 | 2.90 | 5.77 × 10−1 | 5.01 × 101 | 4.20 × 102 | 1.65 × 102 | 8.14 × 101 | ||
| MFO | 1.25 | 1.98 × 101 | 1.51 × 101 | 5.34 | 2.06 × 102 | 9.81 × 102 | 5.09 × 102 | 1.97 × 102 | ||
| SCA | 3.78 × 10−2 | 2.03 × 101 | 7.69 | 8.97 | 4.31 × 101 | 2.05 × 102 | 1.26 × 102 | 4.20 × 101 | ||
| BOA | 5.53 × 10−9 | 7.04 × 10−9 | 6.24 × 10−9 | 3.84 × 10−10 | 8.71 × 10−12 | 1.18 × 10−11 | 1.05 × 10−11 | 7.86 × 10−13 | ||
| LAFBA | F4 | 0 | 2.49 × 10−12 | 2.57 × 10−13 | 6.51 × 10−13 | F9 | 0 | 6.42 × 10−8 | 1.62 × 10−8 | 2.38 × 10−8 |
| BA | 5.97 × 101 | 2.77 × 102 | 1.43 × 102 | 5.73 × 101 | 3.80 | 8.41 | 6.17 | 1.05 | ||
| PSO | 6.26E × 101 | 1.39 × 102 | 9.11 × 101 | 2.09 × 101 | 4.02 × 10−1 | 1.49 | 7.33 × 10−1 | 2.34 × 10−1 | ||
| MFO | 1.24 × 102 | 2.84 × 102 | 1.75 × 102 | 3.39 × 101 | 5.80 | 8.48 | 7.31 | 6.34 × 10−1 | ||
| SCA | 1.476745263 | 1.48 × 102 | 4.68 × 101 | 3.24 × 101 | 1.11 | 6.68 | 3.98 | 1.26 | ||
| BOA | 0 | 2.19 × 102 | 3.93 × 101 | 8.01 × 101 | 4.30 × 10−9 | 5.59 × 10−9 | 5.13 × 10−9 | 2.75 × 10−10 | ||
| LAFBA | F5 | 0 | 1.64 × 10−14 | 2.62 × 10−15 | 4.82 × 10−15 | F10 | 0 | 6.76 × 10−14 | 1.10 × 10−14 | 1.82 × 10−14 |
| BA | 1.78 × 10−1 | 3.73 × 10−1 | 3.06 × 10−1 | 6.35 × 10−2 | 1.57 × 102 | 2.68 × 103 | 7.54 × 102 | 4.79 × 102 | ||
| PSO | 3.72 × 10−2 | 2.28 × 10−1 | 9.21 × 10−2 | 3.74 × 10−2 | 3.53 | 3.39 × 101 | 1.32 × 101 | 7.06 | ||
| MFO | 3.12 × 10−1 | 3.73 × 10−1 | 3.42 × 10−1 | 1.72 × 10−2 | 7.39 | 1.65 × 102 | 6.46 × 101 | 3.86 × 101 | ||
| SCA | 3.72 × 10−2 | 1.27 × 10−1 | 4.87 × 10−2 | 2.21 × 10−2 | 3.02 | 7.53 × 101 | 3.54 × 101 | 1.91 × 101 | ||
| BOA | 7.85 × 10−2 | 1.27 × 10−1 | 1.17 × 10−1 | 1.87 × 10−2 | 9.36 × 10−12 | 1.23 × 10−11 | 1.11 × 10−11 | 6.22 × 10−14 |
| Algorithm | Function | Best | Worst | Average | SD | Function | Best | Worst | Average | SD |
|---|---|---|---|---|---|---|---|---|---|---|
| LAFBA | F1 | 0 | 1.67 × 10−15 | 2.87 × 10−16 | 5.31 × 10−16 | F6 | 0 | 1.81 × 10−13 | 5.31 × 10−14 | 6.00 × 10−14 |
| BA | 5.33 × 102 | 2.05 × 103 | 1.31 × 103 | 3.86 × 102 | 4.33 × 102 | 2.06 × 103 | 1.15 × 103 | 4.26 × 102 | ||
| PSO | 1.11 | 1.03 × 101 | 4.16 | 2.19 | 1.56 | 6.14 × 101 | 1.35 × 101 | 1.38 × 101 | ||
| MFO | 4.57 × 102 | 1.03 × 103 | 6.68 × 102 | 1.29 × 102 | 1.27 × 102 | 2.41 × 102 | 1.90 × 102 | 3.25 × 101 | ||
| SCA | 1.40 × 101 | 2.31 × 102 | 1.01 × 102 | 6.37 × 101 | 3.02 | 9.46 × 101 | 3.31 × 101 | 2.13 × 101 | ||
| BOA | 4.79 × 10−12 | 1.99 × 10−11 | 1.29 × 10−11 | 4.35 × 10−12 | 1.09 × 10−11 | 1.34 × 10−11 | 1.19 × 10−11 | 5.62 × 10−13 | ||
| LAFBA | F2 | 0 | 5.18 × 10−27 | 5.64 × 10−28 | 1.11 × 10−27 | F7 | 0 | 5.14 × 10−12 | 1.14 × 10−12 | 1.90 × 10−12 |
| BA | 1.58 × 10−7 | 1.51 | 2.02 × 10−1 | 4.22 × 10−1 | 2.37 × 103 | 2.11 × 104 | 9.63 × 103 | 4.51 × 103 | ||
| PSO | 1.28 | 1.31 × 101 | 4.69 | 2.88 | 2.12 × 102 | 4.43 × 103 | 6.72 × 102 | 9.23 × 102 | ||
| MFO | 2.76 | 1.33 × 101 | 7.31 | 2.53 | 5.75 × 103 | 1.40 × 104 | 9.27 × 103 | 2.35 × 103 | ||
| SCA | 1.61 | 9.52 | 4.29 | 1.89 | 2.39 × 102 | 3.80 × 103 | 1.17 × 103 | 7.31 × 102 | ||
| BOA | 1.10 × 10−14 | 1.58 × 10−14 | 1.29 × 10−14 | 1.02 × 10−15 | 1.19 × 10−11 | 1.53 × 10−11 | 1.35 × 10−11 | 8.61 × 10−13 | ||
| LAFBA | F3 | 0 | 1.53 × 10−7 | 3.86 × 10−8 | 5.92 × 10−8 | F8 | 0 | 1.57 × 10−12 | 1.68 × 10−13 | 3.74 × 10−13 |
| BA | 1.51 × 101 | 1.92 × 101 | 1.78 × 101 | 8.52 × 10−1 | 3.44 × 102 | 1.74 × 103 | 8.28 × 102 | 2.86 × 102 | ||
| PSO | 4.56 | 8.12 | 6.12 | 9.17 × 10−1 | 7.99 × 102 | 3.06 × 103 | 1.52 × 103 | 5.23 × 102 | ||
| MFO | 1.93 × 101 | 1.99 × 101 | 1.97 × 101 | 1.62 × 10−1 | 2.39 × 103 | 5.00 × 103 | 3.99 × 103 | 6.68 × 102 | ||
| SCA | 8.28 | 2.06 × 101 | 1.68 × 101 | 4.74 | 9.96 × 102 | 2.00 × 103 | 1.44 × 103 | 2.26 × 102 | ||
| BOA | 5.14 × 10−9 | 6.81 × 10−9 | 5.85 × 10−9 | 3.48 × 10−10 | 8.18 × 10−12 | 1.19 × 10−11 | 1.04 × 10−11 | 8.34 × 10−13 | ||
| LAFBA | F4 | 0 | 3.41 × 10−11 | 1.03 × 10−11 | 1.11 × 10−11 | F9 | 0 | 1.80 × 10−7 | 4.13 × 10−8 | 6.89 × 10−8 |
| BA | 2.02 × 102 | 8.14 × 102 | 4.60 × 102 | 1.49 × 102 | 5.36 | 9.19 | 7.04 | 1.06 | ||
| PSO | 4.28 × 102 | 7.24 × 102 | 5.65 × 102 | 6.46 × 101 | 1.19 | 2.84 | 1.77 | 4.13 × 10−1 | ||
| MFO | 8.15E × 102 | 1.10 × 103 | 9.19 × 102 | 7.34 × 10−3 | 8.95 | 9.69 | 9.37 | 2.02 × 10−1 | ||
| SCA | 3.24 × 101 | 6.68 × 102 | 2.59 × 102 | 1.43 × 102 | 8.50 | 9.47 | 9.15 | 2.18 × 10−1 | ||
| BOA | 0 | 3.51 × 10−1 | 1.17 × 10−2 | 6.40 × 10−2 | 4.66 × 10−9 | 5.89 × 10−9 | 5.28 × 10−9 | 2.71 × 10−10 | ||
| LAFBA | F5 | 0 | 2.66 × 10−13 | 5.69 × 10−14 | 7.18 × 10−14 | F10 | 0 | 1.96 × 10−12 | 5.81 × 10−13 | 7.43 × 10−13 |
| BA | 3.73 × 10−1 | 4.72 × 10−1 | 4.44 × 10−1 | 2.52 × 10−2 | 2.47 × 103 | 1.37 × 104 | 6.31 × 103 | 2.72 × 103 | ||
| PSO | 7.82 × 10−2 | 3.12 × 10−1 | 1.92 × 10−1 | 5.56 × 10−2 | 1.29 × 102 | 4.26 × 102 | 2.55 × 102 | 7.16 × 101 | ||
| MFO | 4.60 × 10−1 | 4.76 × 10−1 | 4.70 × 10−1 | 3.45 × 10−3 | 4.13 × 102 | 9.28 × 102 | 6.59 × 102 | 1.39 × 102 | ||
| SCA | 1.78 × 10−1 | 3.47 × 10−1 | 2.83 × 10−1 | 4.28 × 10−2 | 4.48 × 102 | 1.38 × 103 | 7.26 × 102 | 1.94 × 102 | ||
| BOA | 1.27 × 10−1 | 1.54 × 10−1 | 1.30 × 10−1 | 5.35 × 10−3 | 9.76 × 10−12 | 1.43 × 10−11 | 1.21 × 10−11 | 1.06 × 10−12 |
| F | LAFBA vs. BA | LAFBA vs. PSO | LAFBA vs. MFO | LAFBA vs. SCA | LAFBA vs. BOA | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| p_Value | h | p_Value | h | p_Value | h | p_Value | h | p_Value | h | |
| F1 | 9.78 × 10−12 | 1 | 9.78 × 10−12 | 1 | 9.78 × 10−12 | 1 | 9.78 × 10−12 | 1 | 9.78 × 10−12 | 1 |
| F2 | 6.51 × 10−11 | 1 | 6.50 × 10−11 | 1 | 6.51 × 10−11 | 1 | 6.51 × 10−11 | 1 | 6.48 × 10−11 | 1 |
| F3 | 3.71 × 10−11 | 1 | 3.71 × 10−11 | 1 | 3.71 × 10−11 | 1 | 3.71 × 10−11 | 1 | 0.111655 | 0 |
| F4 | 1.24 × 10−11 | 1 | 1.24 × 10−11 | 1 | 1.24 × 10−11 | 1 | 1.24 × 10−11 | 1 | 1.14 × 10−06 | 1 |
| F5 | 2.23 × 10−11 | 1 | 1.68 × 10−11 | 1 | 9.12 × 10−12 | 1 | 2.52 × 10−11 | 1 | 2.55 × 10−11 | 1 |
| F6 | 6.51 × 10−11 | 1 | 6.51 × 10−11 | 1 | 6.51 × 10−11 | 1 | 6.51 × 10−11 | 1 | 6.45 × 10−11 | 1 |
| F7 | 6.51 × 10−11 | 1 | 6.51 × 10−11 | 1 | 6.51 × 10−11 | 1 | 6.51 × 10−11 | 1 | 6.46 × 10−11 | 1 |
| F8 | 6.50 × 10−11 | 1 | 6.50 × 10−11 | 1 | 6.50 × 10−11 | 1 | 6.50 × 10−11 | 1 | 6.46 × 10−11 | 1 |
| F9 | 6.51 × 10−11 | 1 | 6.51 × 10−11 | 1 | 6.51 × 10−11 | 1 | 6.51 × 10−11 | 1 | 0.043201 | 1 |
| F10 | 6.50 × 10−11 | 1 | 6.51 × 10−11 | 1 | 6.51 × 10−11 | 1 | 6.51 × 10−11 | 1 | 6.46 × 10−11 | 1 |
| Algorithms | Optimal Values for Variables | Optimal Cost | ||
|---|---|---|---|---|
| d | D | N | ||
| GSA [42] | 0.050276 | 0.323680 | 13.525410 | 0.0127022 |
| PSO (Ha and Wang) [43] | 0.051728 | 0.357644 | 11.244543 | 0.0126747 |
| ES (Coello and Montes) [44] | 0.051989 | 0.363965 | 10.890522 | 0.0126810 |
| GA(Coello) [45] | 0.051480 | 0.351661 | 11.632201 | 0.0127048 |
| Improved HS (Mmahdavi et al.) [46] | 0.051154 | 0.349871 | 12.076432 | 0.0126706 |
| MFO [9] | 0.051994 | 0.364109 | 10.868422 | 0.0126669 |
| WOA [47] | 0.051207 | 0.345215 | 12.004032 | 0.0126763 |
| Montes and Coello [48] | 0.051643 | 0.355360 | 11.397926 | 0.0126980 |
| Constraint correction (Arora) [41] | 0.050000 | 0.315900 | 14.250000 | 0.0128334 |
| Mathematical optimization (Belegundu) [40] | 0.053396 | 0.399180 | 9.1854000 | 0.0127303 |
| LAFBA | 0.051663 | 0.356074 | 11.333400 | 0.0126720 |
| Algorithms | Optimal Values for Variables | Optimal Cost | |||
|---|---|---|---|---|---|
| h | l | t | b | ||
| GWO [49] | 0.205676 | 3.478377 | 9.03681 | 0.205778 | 1.72624 |
| GSA [42] | 0.182129 | 3.856979 | 10.0000 | 0.202376 | 1.87995 |
| CPSO [50] | 0.202369 | 3.544214 | 9.048210 | 0.205723 | 1.72802 |
| GA(Coello) [51] | N/A | N/A | N/A | N/A | 1.8245 |
| GA(Deb) [52] | N/A | N/A | N/A | N/A | 2.3800 |
| GA(Deb) [53] | 0.2489 | 6.1730 | 8.1789 | 0.2533 | 2.4331 |
| HS (Lee and Geem) [54] | 0.2442 | 6.2331 | 8.2915 | 0.2443 | 2.3807 |
| MVO [55] | 0.2054 | 3.47319 | 9.044502 | 0.20569 | 1.72645 |
| GSA [56] | 0.2057 | 3.4704 | 9.0366 | 0.2057 | 1.7248 |
| MFO [9] | 0.2057 | 3.4703 | 9.0364 | 0.2057 | 1.72452 |
| WOA [47] | 0.205396 | 3.484293 | 9.037426 | 0.206276 | 1.730499 |
| Random [57] | 0.4575 | 4.7313 | 5.0853 | 0.6600 | 4.1185 |
| Simplex [57] | 0.2792 | 5.6256 | 7.7512 | 0.2796 | 2.5307 |
| David [57] | 0.2434 | 6.2552 | 8.2915 | 0.2444 | 2.3841 |
| Approx [57] | 0.2444 | 6.2189 | 8.2915 | 0.2444 | 2.3815 |
| LAFBA | 0.184706185 | 3.642655691 | 9.134897358 | 0.205254053 | 1.7287 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Li, X.; Liu, J.; Ruan, X. An Improved Bat Algorithm Based on Lévy Flights and Adjustment Factors. Symmetry 2019, 11, 925. https://doi.org/10.3390/sym11070925
Li Y, Li X, Liu J, Ruan X. An Improved Bat Algorithm Based on Lévy Flights and Adjustment Factors. Symmetry. 2019; 11(7):925. https://doi.org/10.3390/sym11070925
Chicago/Turabian StyleLi, Yu, Xiaoting Li, Jingsen Liu, and Ximing Ruan. 2019. "An Improved Bat Algorithm Based on Lévy Flights and Adjustment Factors" Symmetry 11, no. 7: 925. https://doi.org/10.3390/sym11070925
APA StyleLi, Y., Li, X., Liu, J., & Ruan, X. (2019). An Improved Bat Algorithm Based on Lévy Flights and Adjustment Factors. Symmetry, 11(7), 925. https://doi.org/10.3390/sym11070925