Abstract
In this paper, a kind of nonlinear Schrödinger (NLS) equation, called an NLS-like equation, is Riemann–Hilbert investigated. We construct a Lax pair associated with the NLS equation and combine the spectral analysis to formulate the Riemann–Hilbert (R–H) problem. Then, we mainly use the symmetry relationship of potential matrix Q to analyze the zeros of and ; the N-soliton solutions of the NLS-like equation are expressed explicitly by a particular R–H problem with an unit jump matrix. In addition, the single-soliton solution and collisions of two solitons are analyzed, and the dynamic behaviors of the single-soliton solution and two-soliton solutions are shown graphically. Furthermore, on the basis of the R–H problem, the evolution equation of the R–H data with the perturbation is derived.
1. Introduction
It is known that soliton theory plays an important role in many fields. There are many methods to study soliton equations, of which the inverse scattering method [,,] and the Riemann–Hilbert (R–H) method [,,,] are two important techniques. The former uses the nonlinear Fourier method [], in which the calculation procedure is extremely complicated. Conversely, the latter can provide an equivalent and more direct method to solve integrable equations, especially for soliton solutions. Thus, this method has been constantly developed [,,,,,,]. Furthermore, there are many techniques and transformations for finding exact solutions for soliton equations, such as the Darboux transformation method [,,], the Bäcklund transformation method [,], the Hirota bilinear method [,,], the homogeneous balance method [,], Frobenius integrable decompositions [,,], and Wronskian technology [,]. These methods have greatly promoted the development of soliton theory. From the specific limit of the general soliton solution, lump solutions [,,,], periodic solutions [,], and complex solutions [,] can be obtained. In recent years, the initial value problem of integrable equations on the half-line and finite interval [,,] have also been discussed by formulating an associated R–H problem.
As we all know, the soliton solutions of soliton equations with important physical backgrounds have been widely studied. Among them, the nonlinear Schrödinger (NLS) equation is a very significant integrable model in Mathematical physics, which describes water wave theory, nonlinear optics, plasma physics, and so on. It has the following form:
On the basis of this, an NLS-like equation
is derived as follows. We consider a soliton equation which has the following Lax pair:
where is a matrix function, A, B, C contain the spectral parameter and function q, r and its derivatives. The related stationary zero curvature equation is
Then the Equation (5) becomes
Let us take A, B, C as the six polynomial of ,
Therefore, the Equation (6) has following equivalence relation:
We choose , and have
The following equations can be obtained by setting :
In addition, we can get () and
Similarly, can be obtained. We also choose , through the same steps as above and have . Thus,
The matrix spectral problem can be obtained by taking ,
A direct calculation shows . Notice that the term is independent of , thus, it can become positive as we assume
and using the same method as above, we have
The corresponding zero curvature equation is , and we get
Taking , the Lax pair can be obtained:
where the symbol represents complex conjugation. In our analysis, we assume the potential q is smooth enough and decays rapidly to zero when . Furthermore, at any later time t, we look for solution with the initial condition . When setting , Equation (2) becomes a classical nonlinear Schrödinger Equation (1).
In this paper, we study the perturbation theory of the NLS-like equation. Obviously, small perturbations of integrable conditions can be regarded as perturbations of integrable models. Our formalism is in view of the R–H problem related to the NLS-like equation. The main advantage of the proposed method is its algebraic property, which is different from the method using the Gel’Fand Leviaon integral equation []. The R–H problem has many applications in dealing with disturbed soliton dynamics []. Modern versions of perturbation theory for the R–H problem have been published in a series of papers [,,,]. The direct perturbation theory is another form of soliton perturbation theory, which develops on the basis of the perturbation solution expansion into the square eigenfunction of the linearized soliton equation [].
The main structure of this article is as follows. In Section 2, we give the Lax pair of the NLS-like equation. Then, the properties of the equivalent space matrix spectral problem of matrix eigenfunctions are analyzed, and the R–H problem related to the newly introduced space matrix spectral problem is formulated. In Section 3, through the special reductive R–H problem, in which the jump matrix is a unit matrix, the explicit expressions of the N-soliton solutions are obtained. In addition, the single soliton solution and collisions of the two-soliton solutions are analyzed. The perturbation theory based on Section 2 and the evolution equation of R–H data with perturbation are given in Section 4. Finally, the paper is summarized and further questions are given in Section 5.
2. The Riemann–Hilbert Problem
In what follows, we set , and constructed a R–H formulation for Equation (2) with scattering and inverse scattering methods.
Let be a solution of Lax pair (8) and (9) and the following relation can be obtained by defining :
By taking the derivative of the right-hand side of these two equations with respect to t and x, we get
Throughout this work, we consider in (8)–(9) to be a fundamental matrix. In addition, as and we get , where is a diagonal constant matrix,
It is convenient to introduce a new matrix spectral function , which can be defined as
Hence, the variable x and t in the new matrix J are independent at infinity. By inserting Equation (14) into (8)–(9), the original Lax pair (8)–(9) can be rewritten as
with
and . From Equation (17), it can be seen that , and
where the superscript represents the Hermitian of a matrix. In the scattering process, we start from the x-part of the Lax pair and regard t as a parameter and omit it.
Let us first introduce the Jost solutions, which have the following asymptotic properties:
where I is a identity matrix, and the subscript of indicates that the boundary conditions are at , respectively. By using the large-x asymptotic condition (19), the x part of Equation (15) can be transformed into the Volterra integral equation of
Through the direct analysis of Equations (20) and (21), because of the structure of the potential Q in Equation (17), it can be seen that the first column of contains only the exponential factor , as , since , decays. In addition, the second column of includes only exponential factor , as , since , also decays. Thus, we believe these two columns can be analytic for and continuous for . By using a similar analysis, the second column of as well as the first column of can also be analytic for and continuous for .
Remark 1.
The implementation of the inverse scattering transform of the NLS-like equation is different to the implementation of the derivative NLS equation. The differences are shown below:
(i) One needs to see the continuity of differently;
(ii) It is necessary to distinguish between the upper half plane and the lower half plane of .
Able’s formula tells us that
and applying this identity to the Equation (8) and using relation (14), we see that no matter what the value of x is, is a constant. Then, we obtain by utilizing the boundary conditions (19). Thus, denoting
and
In fact, two solutions of the Equation (8), and , are linearly related. Their relationship can be stated as follows:
That is,
where,
which is called the scattering matrix. In view of Equation (26) and , we notice that the scattering matrix satisfies
Thus, defining as a collection of columns, which can be read as
In addition, when the Jost solutions are
which are analytic in , where the matrices ,
and The matrices provide a factorization of the scattering matrix In addition, when the Jost solutions are
which are analytic in . Furthermore, using the Volterra integral Equations (20)–(21), the asymptotic properties of these analytic functions at large- can be obtained:
and
In order to get the corresponding analysis of in , the adjoint equation of Equation (15) is introduced:
As a result of the relationship
and the scattering Equation (15), we have
so that satisfies the adjoint scattering Equation (34). Using the same technique as above, the collection of rows and can be expressed as
It can be seen that the adjoint Jost solutions are
which are analytic in , where
The matrices also provide a factorization of the scattering matrix: In addition, when the adjoint Jost solutions are
which are analytic in . Taking the Volterra integral equation again, we have
and
The analytical properties of the above Jost solutions are summarized below:
Here, the superscript “±” represents that the basic quantity is analyzed in . Obviously, we know the analytic properties of the Jost solutions, hence the analytic properties of the scattering matrix can be easily analyzed. Because of the relation
and
the analysis structure of the scattering matrices S and can be obtained, which is expressed as
According to the relationship between and S, the following equations are obtained:
So far, the matrix functions and are constructed, which are analytic in and , respectively. By defining
the two matrix functions and are related to each other by using Equations (26), (30), (38), and (48):
where
Equation (49) accurately gives the R–H problem of a correlation matrix. From Equations (32) and (40), the asymptotic properties of the above R–H problem shows
and the canonical normalization condition
We know that a key step for solving soliton solutions is to calculate the potential matrix Q through . In view of being the solution of the scattering problem (15), we expand the at large- as
and by taking Equation (53) into Equation (15) and comparing the term of , we have
Therefore, the reconstructed solution q can be represented by as
At this point, the inverse scattering process has been completed.
Similarly, we obtain
Through the large-x asymptotic of from Equation (19) and Equations (55)–(56), we find the full matrix can be expressed as
By the same method, we can get the asymptotic expansion of
It is well known that soliton solutions for the R–H problem with zeros can be obtained by transforming them into a problem without zeros. As long as the is specified at the zeros in , and the structure of the at these zeros can be determined, then the uniqueness of the solution for each of the associated R–H problems defined by the Equations (49)–(50) is established. From the definitions of Equations (30) and (38) as well as the scattering relation (26), we get
Let N be an arbitrary nature, we assume that has N zeros and has N zeros . To get N- Solitons, we suppose that all zeros and are simple zeros. In this case, each of , which includes only a single column vector ; each of , which includes only a single row vector . That is,
The potential matrix Q possesses a symmetry property (18), which yields a symmetry property in the scattering matrix and Jost functions. In addition, we notice that the scattering Equation (15) has the Hermitian property, then by utilizing the anti-Hermitian property of the first equation in (18), we have
Therefore, Equation (61) shows that satisfies the adjoint scattering Equation (34). From Equation (35), we know that also satisfies the adjoint equation. Therefore, and must be linearly related to each other. That is, , where A is x-independent. We can get by utilizing the boundary conditions (19) of Jost solutions . That is,
By utilizing this involution property and definitions Equation (30) as well as (38) for , we see that the analytic solutions also possess the involution property:
In addition, from the scattering relationship (26) between and , the involution property is also suitable for S:
Considering the zeros of the scattering coefficients ) and are and , respectively; the involution relation from the involution property (64) shows
In order to get the symmetric properties of the eigenvectors and , we use the Hermitian of the equation , and take the involution properties Equations (63) and (65). Thus, we have
Then, we compare it with the equation , and see that eigenvectors have the involution property
To obtain soliton solutions in the R–H problems above, we set . When we set , this means that the reflection does not exist in the scattering problem. By factoring a rational matrix , the solution of the non-regular R–H problem with zeros is
is the solution to the following regularized R–H problem:
and as
The rational matrix functions and , which are defined as
where
and and have the same zeros as and , respectively, as well as the null spaces:
Because the zeros and are contants, i.e., they do not rely on spatial variable x and time variable t, it is easy to determine the temporal and spatial evolution of vectors and in . We calculate the derivatives of x on both sides of equation . By utilizing Equation (15), we have
Thus, we can draw a conclusion that for , the vector must be in the kernel of and it must be a scalar function of the vector. We set the constant vanishes and have
In a similar way, the time dependency of can be obtained by utilizing (16):
Finally, we can get
where is an arbitrary constant number column vector, and is an arbitrary constant row vector.
3. The N-Soliton Solutions and Their Danamics
By using the relation in Equations (53) and (68) as well as the reconstructed potential Q in Equation (54), we get the N-soliton solutions of Equation (2), which are expressed as
and
Here, vectors are given by Equation (74), . In addition, matrix M has been defined in Equation (71). Without loss of generality, let . Therefore, the solution q can be expressed explicitly as
where the matrix M is
where .
In order to simplify the calculation, solution q can also be expressed by matrix determinants []:
where
3.1. Single-Soliton Solutions
When , the solution is
We assume that
here, is real part of , and is imaginary part of . In addition, , are real parameters; thus, the solution of Equation (79) can be expressed as
Notice that the shape of the amplitude function is a hyperbolic secant, and its peak amplitude is and the velocity is . We can see the soliton’s peak amplitude only relies on , consequently, the peak cannot change after the soliton collisions. The phase of the solution depends not only linearly on spatial x but also on t. In addition, the parameter represents the initial position of the solitary wave, and represents the phase of the solitary wave. We choose the appropriate parameter and give the evolution characteristics of single soliton solutions in Figure 1.
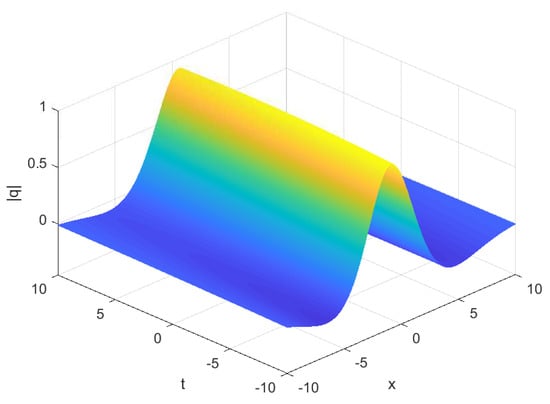
Figure 1.
Modulus of the soliton in Equation (85) with the parameters chosen as
Remark 2.
Because of the difference in Lax pairs, the corresponding R–H problem of the spatial matrix spectral problem is also different. We can clearly see through the solution (85) that the NLS-like equation is different from the single soliton solution of the derivative NLS equation, which also makes the pulse width and velocity of the NLS-like equation corresponding to the derivative NLS equation different.
3.2. Two-Soliton Solutions
When , the two-soliton solutions can also be written out explicitly; however, it is quite complicated. For simplicity, we take into Equation (81) and get
where
Then, we show the collision of the two-soliton in Figure 2 and Figure 3. One for the case of and the other one for the case of . Here,
where is real part of and is imaginary part of .
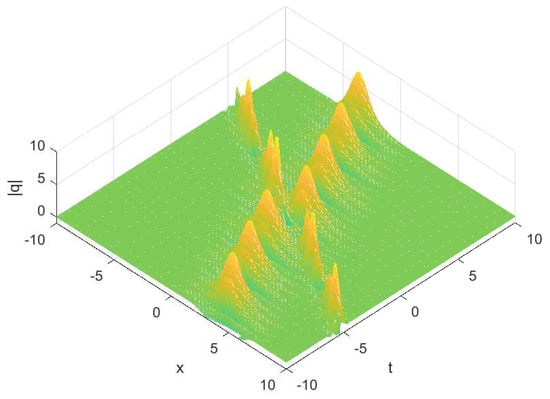
Figure 2.
Modulus of the soliton in Equation (86) with the parameters chosen as
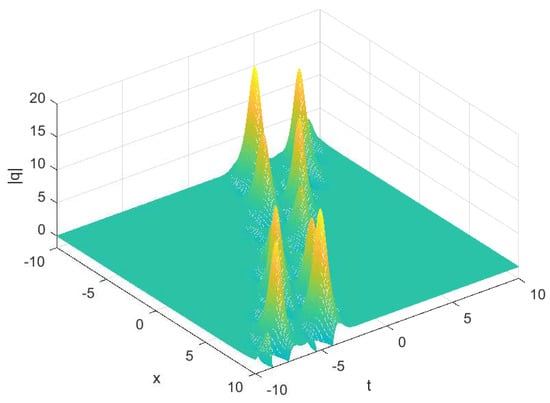
Figure 3.
Modulus of the soliton in Equation (86) with the parameters chosen as
Case I. We set
In this case, we assume that , which indicates that soliton-2 is on the left side of soliton-1 as as well as moves fast. After collision, their position and phase will be scattered. Through asymptotic analysis, we can explain this change.
When , by simple calculation, the asymptotic state of Equation (86) can be expressed as
where and the asymptotic solution has the same peak amplitude and velocity as Equation (86).
When , the asymptotic state of Equation (86) also can be expressed as
where The asymptotic solution also has same peak amplitude and velocity as Equation (86). As Figure 2 shows, the solution does not change their velocity and shape after collision, but the initial positions and phases of solitary waves have shifted.
The position shift is
It is easy to see because . Then, the phase shift is
Similarly, as the asymptotic solutions have the same peak amplitude and velocity with single solitons, where Therefore, the second soliton position shift is
and the phase shift is
From Equations (90) and (92), we get
This shows that the position deviation of each soliton is inversely proportional to its amplitude.
Case II. We set
In the second case, we assume that . As Figure 3 shows, the two solitons have the same velocity, and the amplitude function has periodic oscillations with time.
4. Evolution of the R–H Data in the Perturbed NLS-Like Equation
In this part, a perturbed NLS-like equation
is analyzed, where Equation (95) is called a nearly integrable system. Here, is a perturbation term, and . We give the symbol to the perturbations in order to distinguish the integrable and perturbation contributions. Consequently,
Generally, a perturbation leads to a slow evolution of the R–H data. In fact, a perturbation causes the variational of the potential of the spectral Equation (15), which leads to the variation of the Jost solutions,
By solving the equation, we have
Hence, by utilizing the Equations (26), (30), and (38), we get a variation of a scattering matrix:
Here, and are the matrices defined in Section 2. Notice that the analytic solution is naturally installed in the equation. We can thus denote that
Then,
Matrix is interrelated through matrix G into the R–H problem (49):
From Equations (30) and (38), the variations of the analytic solutions show
where are the evolution functionals, which are defined as
From Equation (63), we get the connection between and , . They contain all the basic information about a perturbation. The additional terms obtained from the perturbation evolution equation are defined by ,
In addition, the evolution equation for the matrix G of the R–H problem also has the form
Indeed, the equation provides the evolution of the continuous R–H data.
Next, we derive the perturbation induced evolution equation for the discrete R–H data, i.e., for the zero and the eigenvector . Vectors are constant without perturbation. Under perturbation, vectors have slow t dependence. Let us start with the equation
which is unaffected by a perturbation. Here, the integral in the exponential takes account of the time dependence of the zero caused by the possible perturbation. Taking the total derivative in t, we get
The first term with is given by Equation (98), which includes the evolution functional . Note that the evolution functional is defined by in Equation (97) which depend on , conversely. Thus, the function , which has the simple pole in , is meromorphic in , where has zero,
where represents the regular part of in the point . The perturbation evolution of the vector is given by
In order to derive the evolution equation of , we start with the equation . Taking the total derivative in t, we get
From Equations (68) and (70), we have
where From Equations (73)–(74), we get
Here, and defined , with and are real constants. Denote , we finally get a simple evolution equation for spectral
and
Perturbation-induced evolution of R–H data is determined by Equations (99), (102), and (103). Notice that these equations are accurate because we have not mentioned any small part of . In addition, these equations cannot be applied directly, because goes in and depends on the unknown solutions for the spectral problem of the perturbed potential Q.
5. Conclusions
In this paper, an NLS-like equation associated with a Lax pair is studied. We start from the spectral analysis of the Lax pair of Equation (2). By using the R–H method, when the scattering coefficients vanish, the regularization condition at the infinity on the real axis can be used to solve the corresponding R–H problem. When the jump matrix G is the unit matrix, the N-soliton solutions of the integrable equation can be obtained. The R–H method is a very useful tool, especially for soliton solutions. As we all know, the R–H approach has been widely used to solve many integrable equations, for example, the generalized Sasa–Satsuma equation [], the general coupled nonlinear Schrödinger equation [], and the Harry–Dym equation []. Furthermore, based on the R–H problem, the evolution functional is derived and the R–H data in the perturbed NLS-like equation is obtained. Perturbation theory has many applications, such as propagation of arbitrarily polarized optical pulses in optical fibers, multicomponent soliton equations, and soliton pulses in various Bose–Einstein condensations.
It is very meaningful to study the exact solutions and other types of integrable equations, and to analyze perturbation theory based on R–H problems. Further research on how to apply the R–H problem to the generalized integrable correspondence equation combined with perturbation theory will be one of our future considerations.
Author Contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Funding
This research was funded by Natural Science Foundation of Shandong Province (Grant No. ZR2019QD018), National Natural Science Foundation of China (Grant No. 61602188), Scientific Research Foundation of Shandong University of Science and Technology for Recruited Talents (Grant No. 2017RCJJ068, 2017RCJJ069).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ablowitz, M.J.; Kaup, D.J.; Newell, A.C.; Segur, H. The inverse scattering Transform-Fourier analysis for nonlinear problems. Stud. Appl. Math. 2015, 53, 249–315. [Google Scholar] [CrossRef]
- Ji, J.L.; Zhu, Z.N. Soliton solutions of an integrable nonlocal modified Korteweg-de Vries equation through inverse scattering transform. J. Math. Anal. Appl. 2017, 453, 973–984. [Google Scholar] [CrossRef]
- Maeda, M.; Sasaki, H.; Segawa, E.; Suzuki, A.; Suzuki, K. Scattering and inverse scattering for nonlinear quantum walks. Discrete Contin. Dyn. Syst. 2018, 38, 18. [Google Scholar] [CrossRef]
- Shchesnovich, V.S. The soliton perturbation theory based on the Riemann-Hilbert spectral problem. Chaos Solitons Fractals 1995, 5, 2121–2133. [Google Scholar] [CrossRef]
- Kaup, D.J.; Yang, J.K. The inverse scattering transform and squared eigenfunctions for a degenerate 3 × 3 operator. Inverse Probl. 2009, 25, 105010–105021. [Google Scholar] [CrossRef]
- Guo, B.L.; Ling, L.M. Riemann-Hilbert approach and N-soliton formula for coupled derivative Schrödinger equation. J. Math. Phys. 2012, 53, 73506. [Google Scholar] [CrossRef]
- Wang, D.S.; Ma, Y.Q.; Li, X.G. Prolongation structures and matter-wave solitons in F = 1 spinor Bose-Einstein condensate with time-dependent atomic scattering lengths in an expulsive harmonic potential. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 3556–3569. [Google Scholar] [CrossRef]
- Huang, L.; Lenells, J. Nonlinear Fourier transforms for the sine-Gordon equation in the quarter plane. J. Differ. Equ. 2017, 264, 3445–3499. [Google Scholar] [CrossRef]
- Zakharov, V.E.; Shabat, A.B. Integration of nonlinear equations of mathematical physics by the method of inverse scattering. II. Funct. Anal. Appl. 1979, 13, 166–174. [Google Scholar] [CrossRef]
- Novikov, S.; Manakov, S.V.; Pitaevskii, L.P.; Zakharov, V.E. Theory of Solitons: The Inverse Scattering Method; Springer Science and Business Media: New York, NY, USA, 1984. [Google Scholar]
- Deift, P.; Zhou, X. A steepest descent method for oscillatory Riemann-Hilbert problems. Bull. Aust. Math. Soc. 1991, 26, 295–368. [Google Scholar] [CrossRef]
- Shchesnovich, V.S.; Yang, J.K. General soliton matrices in the Riemann-Hilbert problem for integrable nonlinear equations. J. Math. Phys. 2003, 44, 4604–4639. [Google Scholar] [CrossRef]
- Webb, J.R.L.; Infante, G. Positive solutions of nonlocal boundary value problems: A unified approach. J. Lond. Math. Soc. 2006, 74, 673–693. [Google Scholar] [CrossRef]
- Geng, X.G.; Wu, J.P. Riemann-Hilbert approach and N-soliton solutions for a generalized Sasa-Satsuma equation. Wave Motion 2016, 60, 62–72. [Google Scholar] [CrossRef]
- Ma, W.X. Riemann-Hilbert problems and N-soliton solutions for a coupled mKdV system. J. Geom. Phys. 2018, 132, 45–54. [Google Scholar] [CrossRef]
- Xu, X.X.; Sun, Y.P. An integrable coupling hierarchy of Dirac integrable hierarchy, its Liouville integrability and Darboux transformation. J. Nonlinear Sci. Appl. 2017, 10, 3328–3343. [Google Scholar] [CrossRef]
- Chen, J.C.; Ma, Z.Y.; Hu, Y.H. Nonlocal symmetry, Darboux transformation and soliton-cnoidal wave interaction solution for the shallow water wave equation. J. Math. Anal. Appl. 2018, 460, 987–1003. [Google Scholar] [CrossRef]
- Zhang, N.; Xia, T.C.; Jin, Q.Y. N-Fold Darboux transformation of the discrete Ragnisco-Tu system. Adv. Differ. Equ. 2018, 2018, 302. [Google Scholar] [CrossRef]
- Zhu, S.D.; Song, J.F. Residual symmetries, nth Bäcklund transformation and interaction solutions for (2+1)-dimensional generalized Broer-Kaup equations. Appl. Math. Lett. 2018, 83, 33–39. [Google Scholar] [CrossRef]
- Chen, H.H. General derivation of Bäcklund transformations from inverse scattering problems. Phys. Rev. Lett. 1974, 33, 925–928. [Google Scholar] [CrossRef]
- Wazwaz, A.M. Multiple-soliton solutions for the KP equation by Hirota’s bilinear method and by the tanh-coth method. Appl. Math. Comput. 2007, 190, 633–640. [Google Scholar] [CrossRef]
- Hu, X.B.; Wu, Y.T. Application of the Hirota bilinear formalism to a new integrable differential-difference equation. Phys. Lett. A 1998, 246, 523–529. [Google Scholar] [CrossRef]
- Ma, W.X.; Zhou, Y. Lump solutions to nonlinear partial differential equations via Hirota bilinear forms. J. Differ. Equ. 2018, 264, 2633–2659. [Google Scholar] [CrossRef]
- Fan, E.G.; Zhang, H.Q. The homogeneous balance method for solving nonlinear soliton equations. Acta Phys. Sin. 1998, 47, 353–362. [Google Scholar]
- Wang, M.L.; Zhou, Y.B.; Li, Z.B. Application of a homogeneous balance method to exact solutions of nonlinear equations in mathematical physics. Phys. Lett. A 1996, 216, 67–75. [Google Scholar] [CrossRef]
- Ma, W.X.; Wu, H.Y.; He, J.S. Partial differential equations possessing Frobenius integrable decompositions. Phys. Lett. A 2007, 364, 29–31. [Google Scholar] [CrossRef]
- Gao, L.; Ma, W.X.; Xu, W. Frobenius integrable decompositions for ninth-order partial differential equations of specific polynomial type. Appl. Math. Comput. 2010, 216, 2728–2733. [Google Scholar] [CrossRef]
- Fang, Y.; Dong, H.H.; Hou, Y.J.; Kong, Y. Frobenius integrable decompositions Of nonlinear evolution equations with modified term. Appl. Math. Comput. 2014, 226, 435–440. [Google Scholar] [CrossRef]
- Xu, T.; Tian, B. An extension of the Wronskian technique for the multicomponent Wronskian solution to the vector nonlinear Schrödinger equation. J. Math. Phys. 2010, 51, 359. [Google Scholar] [CrossRef]
- Corona-Corona, G. A Wronskian of Jost solutions. J. Math. Phys. 2004, 45, 4282–4287. [Google Scholar] [CrossRef]
- Yang, J.Y.; Ma, W.X.; Qin, Z.Y. Lump and lump-soliton solutions to the (2+1)-dimensional Ito equation. Anal. Math. Phys. 2018, 8, 427–436. [Google Scholar] [CrossRef]
- Zhang, Y.; Dong, H.; Zhang, X.; Yang, H. Rational solutions and lump solutions to the generalized (3+1)-dimensional Shallow Water-like equation. Comput. Math. Appl. 2017, 73, 246–252. [Google Scholar] [CrossRef]
- Yong, X.L.; Ma, W.X.; Huang, Y.H.; Liu, Y. Lump solutions to the Kadomtsev-Petviashvili I equation with a self-consistent source. Comput. Math. Appl. 2018, 75, 2633–2659. [Google Scholar] [CrossRef]
- Wang, H. Lump and interaction solutions to the (2+1)-dimensional Burgers equation. Appl. Math. Lett. 2018, 85, 27–34. [Google Scholar] [CrossRef]
- Zeng, Z.J. Periodic solutions of a discrete time non-autonomous ratio-dependent predator-prey system with control. Commun. Korean Math. Soc. 2007, 22, 465–474. [Google Scholar] [CrossRef]
- Rostworowski, A. Higher order perturbations of Anti-de Sitter space and time-periodic solutions of vacuum Einstein equations. Phys. Rev. D 2017, 95, 16. [Google Scholar] [CrossRef]
- Savulescu, J. Wicked problems, complex solutions, and the cost of trust. J. Med. Ethics 2018, 44, 147–148. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Datsko, B.; Gafiychuk, V. Complex spatio-temporal solutions in fractional reaction-diffusion systems near a bifurcation point. Fract. Calc. Appl. Anal. 2018, 21, 237–253. [Google Scholar] [CrossRef]
- Zhu, Q.Z.; Xu, J.; Fan, E.G. The Riemann-Hilbert problem and long-time asymptotics for the Kundu-Eckhaus equation with decaying initial value. Appl. Math. Lett. 2017, 76, 81–89. [Google Scholar] [CrossRef]
- Tian, S.F. Initial-boundary value problems for the general coupled nonlinear Schrödinger equation on the interval via the Fokas method. J. Differ. Equ. 2017, 262, 506–558. [Google Scholar] [CrossRef]
- Zhang, N.; Xia, T.C.; Fan, E.G. A Riemann-Hilbert Approach to the Chen-Lee-Liu Equation on the Half Line. Acta. Math. Appl. Engl. Ser. 2018, 34, 493–515. [Google Scholar] [CrossRef]
- Song, G.H.; Shin, S.Y. Design of corrugated waveguide filters by the Gel’fand-Levitan-Marchenko inverse-scattering method. J. Opt. Soc. Am. A 1985, 2, 1905–1915. [Google Scholar] [CrossRef]
- Kivshar, Y.S.; Zhang, F.; Takeno, S. Multistable nonlinear surface modes. Phys. D 1998, 119, 125–133. [Google Scholar] [CrossRef]
- McLaughlin, D.W.; Scott, A.C. Perturbation analysis of fluxon dynamics. Phys. Rev. A 1978, 18, 1652. [Google Scholar] [CrossRef]
- Kivshar, Y.S.; Malomed, B.A. Dynamics of solitons in nearly integrable systems. Rev. Mod. Phys. 1989, 61, 763. [Google Scholar] [CrossRef]
- Shchesnovich, V.S. Perturbation theory for nearly integrable multicomponent nonlinear PDEs. J. Math. Phys. 2002, 43, 1460–1486. [Google Scholar] [CrossRef][Green Version]
- Doktorov, E.V.; Wang, J.D.; Yang, J.K. Perturbation theory for bright spinor Bose-Einstein condensate solitons. Phys. Rev. A 2008, 77, 043617. [Google Scholar] [CrossRef]
- Kaup, D.J. Integrable systems and squared eigenfunctions. Theor. Math. Phys. 2009, 159, 806–818. [Google Scholar] [CrossRef]
- Wang, D.S.; Zhang, D.J.; Yang, J.K. Integrable properties of the general coupled nonlinear Schrödinger equations. J. Math. Phys. 2010, 51, 133–148. [Google Scholar] [CrossRef]
- Xiao, Y.; Fan, E.G. A Riemann-Hilbert approach to the Harry-Dym equation on the Line. Chin. Ann. Math. Ser. B 2014, 37, 373–384. [Google Scholar] [CrossRef]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).